
Design, Dynamics, and Optimization of a 3-DoF Nonlinear Micro-Gyroscope by Considering the Influence of the Coriolis Force

 , , and
, , and
Abstract
:1. Introduction
2. Parameter Model of the Micro-Gyroscope and Its Mathematical Description
3. Linear Design and Analysis
3.1. Design of the Complete 2-DoF Sense Mode System
3.2. Estimation of Damping
3.3. Linear Analysis
4. Nonlinear Design and Analysis
4.1. Design of Nonlinear Micro-Beam
4.2. Approximate Analytical Solution of the Nonlinear Micro-Gyroscope
4.3. Nonlinear Analysis
4.3.1. Bandwidth and Gain of Nonlinear Micro-Gyroscopes
4.3.2. Optimization of Nonlinear Micro-Gyroscope
4.4. Influence of the Nonlinear Coefficients on the Bandwidth of the Micro-Gyroscope
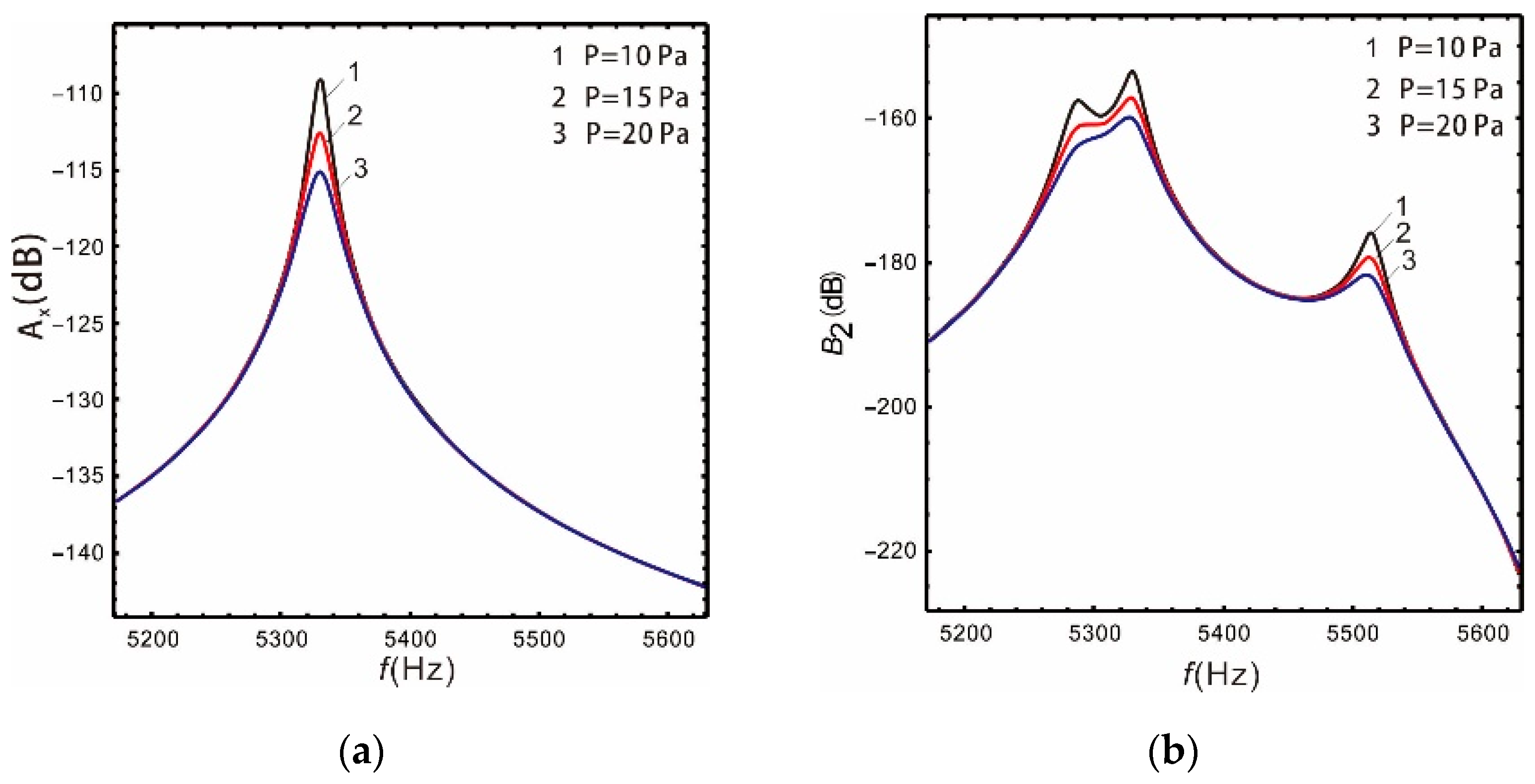
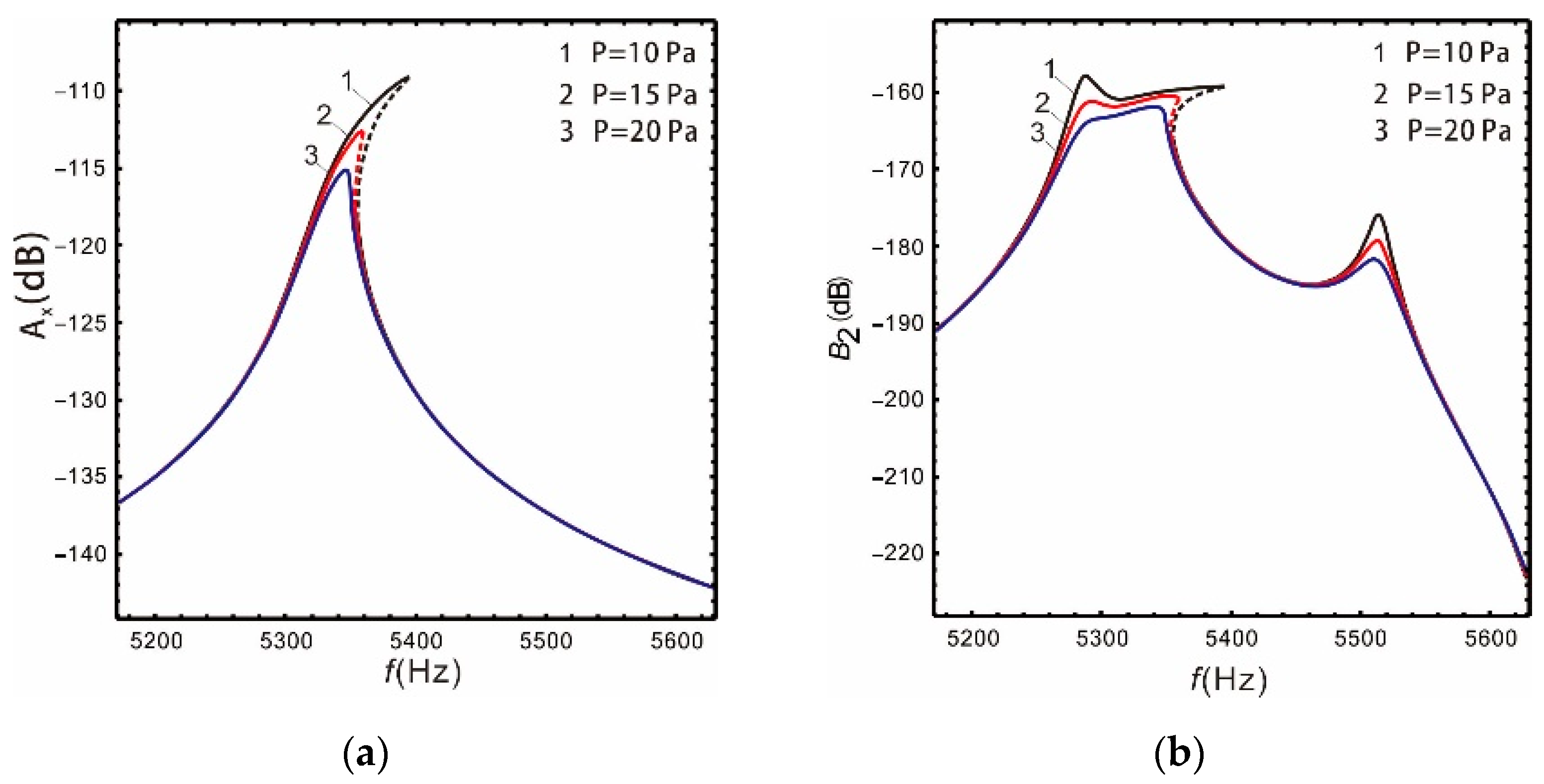
4.5. Influence of Damping on the Bandwidth of the Micro-Gyroscope
5. Conclusions
- (1)
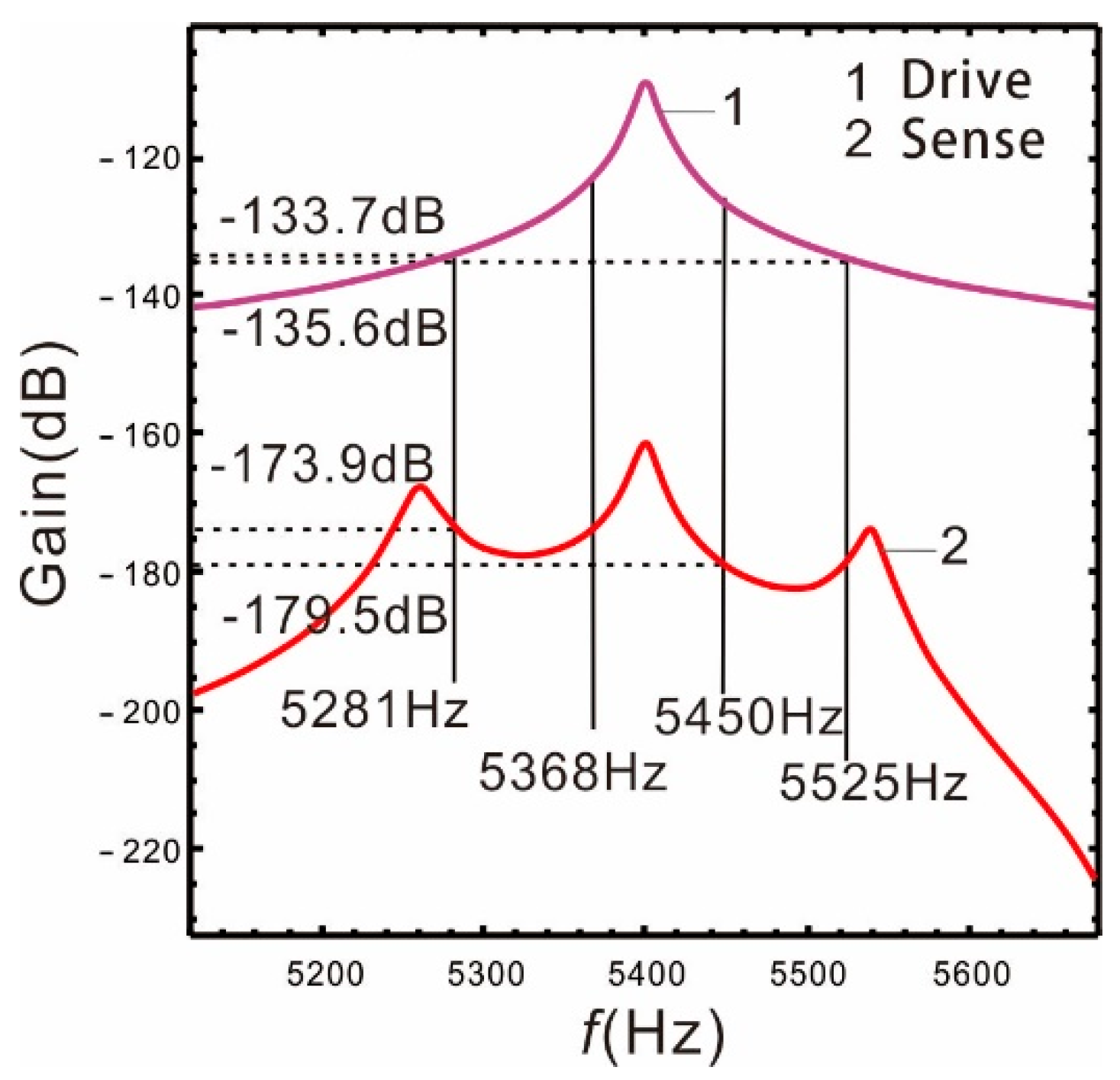
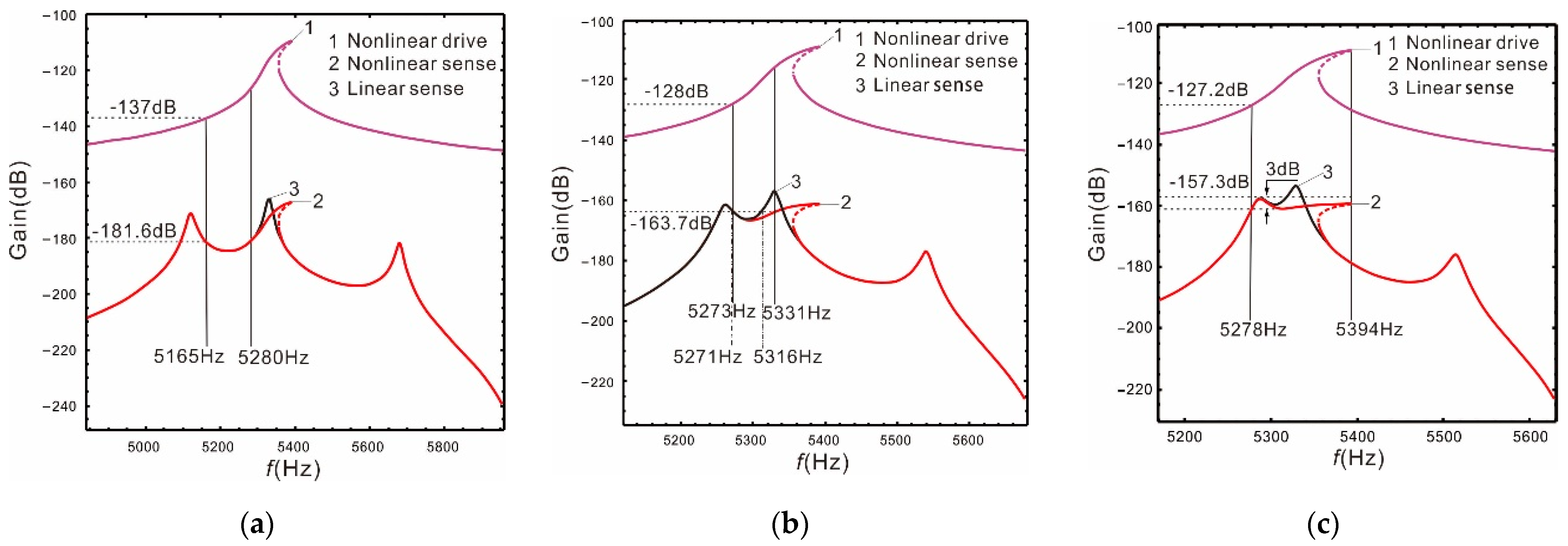
- When the external angular velocity exists, the Coriolis peak in the frequency response of the sense mode produces the same nonlinear hardening characteristics as the drive mode peak. The resonant peaks of the sense mode are not affected by the driving nonlinearity.
- (2)
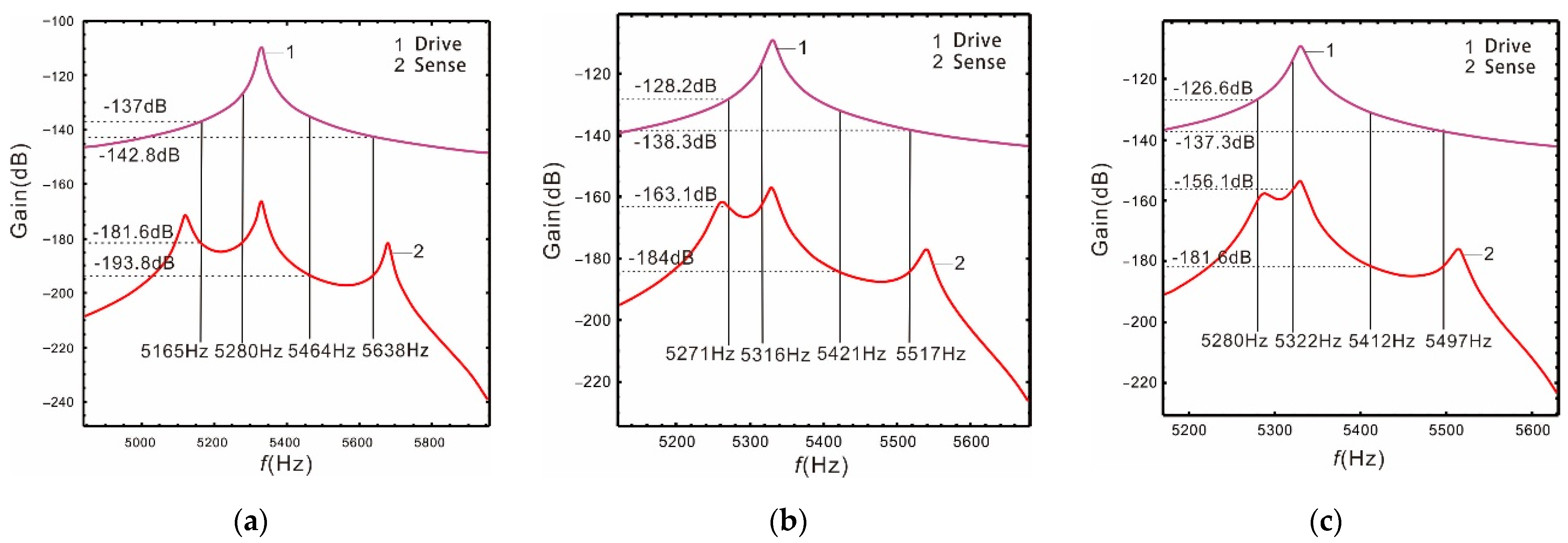
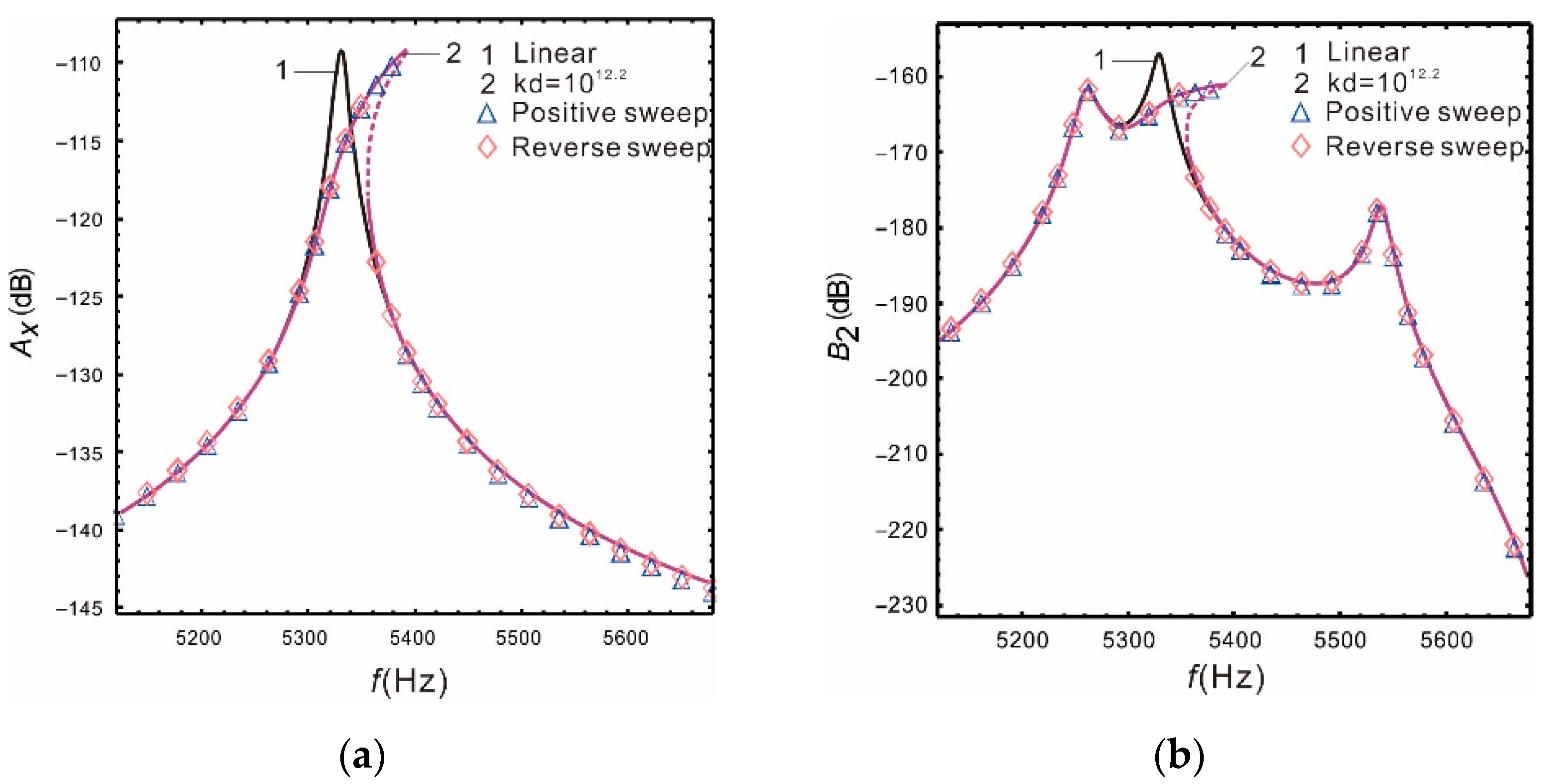
- The peaks spacing of the complete 2-DOF sense mode system can be adjusted arbitrarily. The smaller the peaks spacing, the higher the gain. When the peaks spacing is narrow, the nonlinearity expands the width of the bandwidth. The generation of nonlinearity slightly reduces the gain compared to linearity, but it can greatly increase the bandwidth.
- (3)
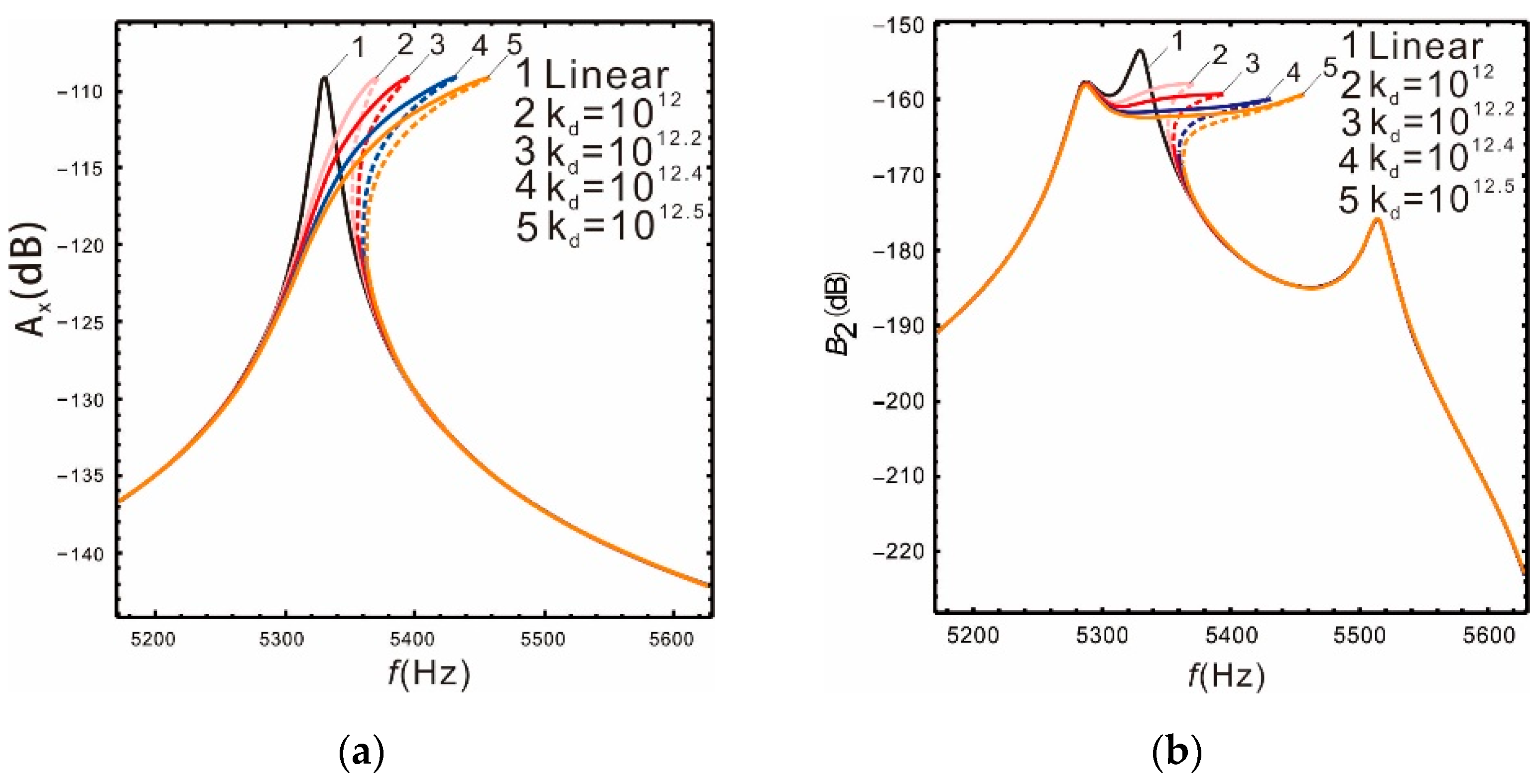
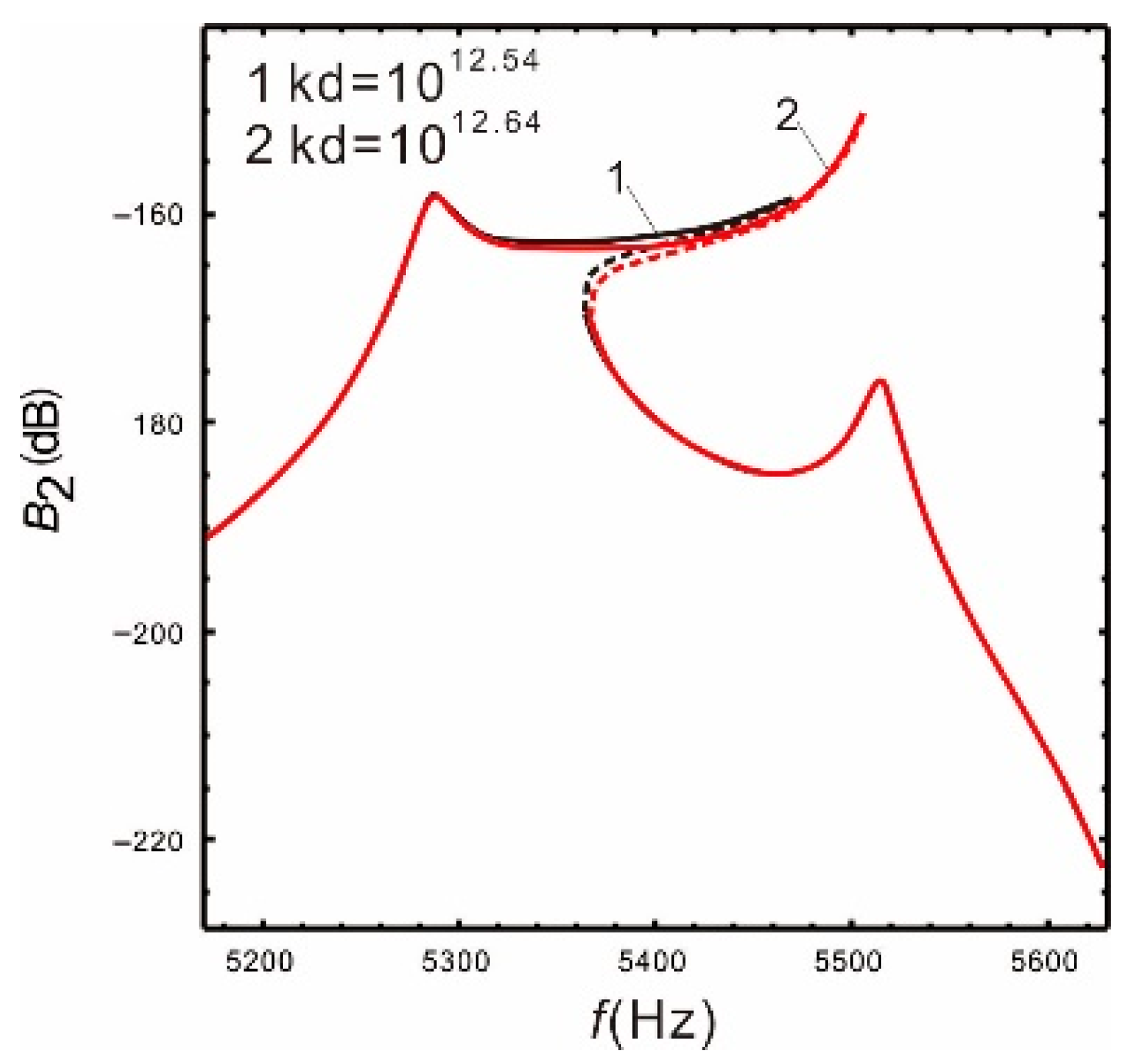
- The bandwidth is very sensitive to the nonlinear coefficient. As the nonlinear coefficient becomes larger, the bandwidth continues to widen. However, the nonlinear coefficient cannot be increased indefinitely, and the value should be selected within a reasonable range.
- (4)
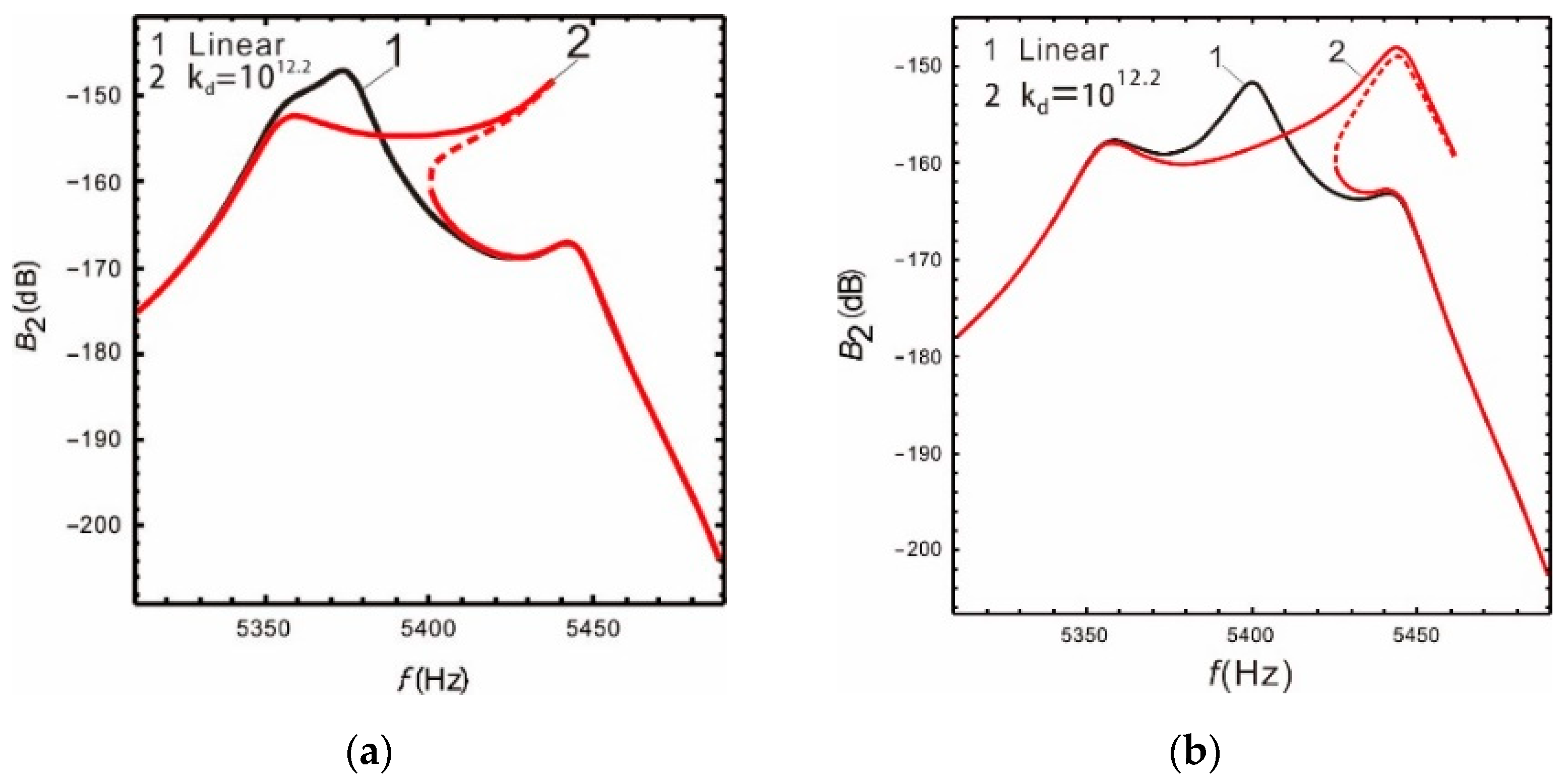
- Large damping can suppress the nonlinearity of the micro-gyroscope. For the linear micro-gyroscopes, increasing damping reduces the gain but the bandwidth increases. For the nonlinear micro-gyroscopes, both the gain and bandwidth are reduced. Therefore, the designed nonlinear micro-gyroscopes should be vacuum packaged as much as possible.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, Y.; Cao, R.; Li, C.; Dean, R.N. Concepts, Roadmaps and Challenges of Ovenized MEMS Gyroscopes: A Review. IEEE Sens. J. 2020, 21, 92–119. [Google Scholar] [CrossRef]
- Xu, P.; Wei, Z.; Guo, Z.; Jia, L.; Han, G.; Si, C.; Ning, J.; Yang, F. A real-time circuit phase delay correction system for MEMS vibratory gyroscopes. Micromachines 2021, 12, 506. [Google Scholar] [CrossRef] [PubMed]
- Bukhari, S.A.R.; Saleem, M.M.; Khan, U.S.; Hamza, A.; Iqbal, J.; Shakoor, R.I. Microfabrication process-driven design, FEM analysis and system modeling of 3-DoF drive mode and 2-DoF sense mode thermally stable non-resonant MEMS gyroscope. Micromachines 2020, 11, 862. [Google Scholar] [CrossRef] [PubMed]
- Esmaeili, A.; Kupaei, M.A.; Faghihian, H.; Mirdamadi, H.R. An adaptable broadband MEMS vibratory gyroscope by simultaneous optimization of robustness and sensitivity parameters. Sens. Actuators A Phys. 2014, 206, 132–137. [Google Scholar] [CrossRef]
- Verma, P.; Arya, S.K.; Gopal, R. Lumped parameter analytic modeling and behavioral simulation of a 3-DOF MEMS gyro-accelerometer. Acta Mech. Sin. 2015, 31, 910–919. [Google Scholar] [CrossRef]
- Hao, S.; Li, W.; Li, H.; Zhang, Q.; Feng, J. The effect of nonlinear driving stiffness on the performance of dual-detection micro-gyro. J. Vib. Shock. 2019, 38, 131–137. (In Chinese) [Google Scholar]
- Larkin, K.; Ghommem, M.; Hunter, A.; Abdelkefi, A. Nonlinear modeling and performance analysis of cracked beam microgyroscopes. Int. J. Mech. Sci. 2020, 188, 105965. [Google Scholar] [CrossRef]
- Yoon, S.W.; Lee, S.; Najafi, K. Vibration sensitivity analysis of MEMS vibratory ring gyroscopes. Sens. Actuators A Phys. 2011, 171, 163–177. [Google Scholar] [CrossRef]
- Ghasemi, S.; Afrang, S.; Rezazadeh, G.; Darbasi, S.; Sotoudeh, B. On the mechanical behavior of a wide tunable capacitive MEMS resonator for low frequency energy harvesting applications. Microsyst. Technol. 2020, 6, 2389–2398. [Google Scholar] [CrossRef]
- Adhikari, S.; Khodaparast, H.H. A multimodal approach for simultaneous mass and rotary inertia sensing from vibrating cantilevers. Phys. E Low-Dimens. Syst. Nanostructures 2021, 125, 114366. [Google Scholar] [CrossRef]
- Hao, S.; Li, W.; Li, H.; Zhang, Q.; Feng, J.; Zhang, K. The effect of electrostatic force nonlinearity on the resonant frequency and sensitivity stability of dual-detection micro-gyros. J. Vib. Shock. 2020, 39, 136–142. (In Chinese) [Google Scholar]
- Radgolchin, M.; Tahani, M. Nonlinear Vibration Analysis of Beam Microgyroscopes using Nonlocal Strain Gradient Theory. Sens. Imaging 2021, 22, 13. [Google Scholar] [CrossRef]
- Parajuli, M.; Sobreviela, G.; Pandit, M.; Zhang, H.; Seshia, A.A. Sub-deg-per-hour edge-anchored bulk acoustic wave micromachined disk gyroscope. J. Microelectromech. Syst. 2021, 30, 836–842. [Google Scholar] [CrossRef]
- Jin, L.; Qin, S.Y.; Zhang, R.; Li, M.W. High-sensitivity tunneling magneto-resistive micro-gyroscope with immunity to external magnetic interference. Sci. Rep. 2020, 10, 16441. [Google Scholar] [CrossRef] [PubMed]
- Lv, X. Design and Research of New Micromachined Gyro; Harbin Engineering University: Harbin, China, 2015. (In Chinese) [Google Scholar]
- Schofield, A.R.; Trusov, A.A.; Shkel, A.M. Micromachined gyroscope concept allowing interchangeable operation in both robust and precision modes. Sens. Actuators A Phys. 2011, 165, 35–42. [Google Scholar] [CrossRef]
- Xu, G.; Hu, H.; Xu, Z.; Chen, X.; Ma, Y. Design and analysis of resonant MEMS pressure sensor. Instrum. Technol. Sens. 2019, 12, 5–11. [Google Scholar]
- Hajjaj, A.Z.; Jaber, N.; Ilyas, S.; Alfosail, F.; Younis, M. Linear and nonlinear dynamics of micro and nano-resonators: Review of recent advances. Int. J. Non-Linear Mech. 2020, 119, 103328. [Google Scholar] [CrossRef]
- Nayfeh, A.H.; Pai, P.F. Linear and Nonlinear Structural Mechanics; Wiley Interscience: Hoboken, NJ, USA, 2004; Volume 10, pp. 1–64. [Google Scholar]
- Hao, S.; Zhu, Y.; Zhang, C.; Feng, J.; Chen, W.; Zhang, K. A novel optimization design method for multi-degree of freedom vibratory gyroscope. IEEE Int. Conf. Mechatron. Autom. (ICMA) 2019, 8, 1276–1281. [Google Scholar]
- Li, A.; Wang, Z.; Zhu, L.; Wang, Z.; Shi, J.; Yang, W. Design optimization of guide vane for mitigating elbow erosion using computational fluid dynamics and response surface methodology. Particuology 2022, 63, 83–94. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Thickness of structural layer (t) | 80 µm |
| Mass of the drive frame (mb) | 2.85 × 10−7 Kg |
| Mass of the decoupling frame (mp1) | 2.6 × 10−7 Kg |
| Mass of the sense frame (mp2) | 2 × 10−7 Kg |
| Mass of the sense-II (ms) | 1.2 × 10−7 Kg |
| ) | 270 |
| ) | 500 |
| ) | 40 × 10−6 µm |
| ) | 16 × 10−6 µm |
| ) | 10 × 10−6 µm |
| ) | 4 × 10−6 µm |
| ) | 0.26 |
| ) | 0.97 |
| ) | 5.34 × 10−6 N |
| ) | 4.5 × 10−5 N·s/m |
| ) | 3.4 × 10−5 N·s/m |
| ) | 1.8 × 10−5 N·s/m |
| Peaks Pacing (Hz) | Sense Bandwidth (Hz) | Sense Gain (dB) | Drive Gain (dB) | |
|---|---|---|---|---|
| 560 | Linear | 115 | −181.6 | −137 |
| Nonlinear | 115 | −181.6 | −137 | |
| 280 | Linear | 45 | −163.1 | −128.2 |
| Nonlinear | 58 | −163.7 | −128 | |
| 230 | Linear | 42 | −156.1 | −126.6 |
| Nonlinear | 116 | −157.3 | −127.2 | |
| Number | X1 (Hz) | Δf (Hz) | Bandwidth (Hz) | Gain (dB) | Number | X1 (Hz) | Δf (Hz) | Bandwidth (Hz) | Gain (dB) |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 275 | 70 | 62 | −162.9 | 10 | 280 | 100 | 113 | −157.5 |
| 2 | 275 | 80 | 76 | −160.7 | 11 | 280 | 110 | 80 | −156.1 |
| 3 | 275 | 90 | 111 | −158.5 | 12 | 280 | 120 | 69 | −154.8 |
| 4 | 275 | 100 | 108 | −156.5 | 13 | 285 | 70 | 60 | −164.0 |
| 5 | 275 | 110 | 81 | −155.5 | 14 | 285 | 80 | 64 | −162.1 |
| 6 | 275 | 120 | 63 | −154.6 | 15 | 285 | 90 | 108 | −159.8 |
| 7 | 280 | 70 | 65 | −163.2 | 16 | 285 | 100 | 115 | −157.5 |
| 8 | 280 | 80 | 82 | −161.3 | 17 | 285 | 110 | 89 | −156.3 |
| 9 | 280 | 90 | 109 | −159.1 | 18 | 285 | 120 | 70 | −155.2 |
| kd | Sense Bandwidth (Hz) | Sense Gain (dB) | Drive Gain (dB) |
|---|---|---|---|
| Linear | 42 | −156.1 | −126.6 |
| 1012 | 96 | −157 | −127 |
| 1012.2 | 116 | −157.3 | −127.2 |
| 1012.4 | 154 | −157.5 | −127.4 |
| 1012.5 | 179 | −157.8 | −127.5 |
| Pressure (Pa) | Sense Bandwidth (Hz) | Sense Gain (dB) | Drive Gain (dB) | |
|---|---|---|---|---|
| 10 | Linear | 42 | −156.1 | −126.6 |
| Nonlinear | 116 | −157.3 | −127.2 | |
| 15 | Linear | 45 | −158.8 | −126 |
| Nonlinear | 81 | −160.6 | −124.3 | |
| 20 | Linear | 50 | −160.2 | −124.9 |
| Nonlinear | 67 | −162.4 | −123.8 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, S.; Lu, L.; Zhang, K.; Hao, S.; Zhang, Q.; Feng, J. Design, Dynamics, and Optimization of a 3-DoF Nonlinear Micro-Gyroscope by Considering the Influence of the Coriolis Force. Micromachines 2022, 13, 393. https://doi.org/10.3390/mi13030393
Wang S, Lu L, Zhang K, Hao S, Zhang Q, Feng J. Design, Dynamics, and Optimization of a 3-DoF Nonlinear Micro-Gyroscope by Considering the Influence of the Coriolis Force. Micromachines. 2022; 13(3):393. https://doi.org/10.3390/mi13030393
Chicago/Turabian StyleWang, Sai, Linping Lu, Kunpeng Zhang, Shuying Hao, Qichang Zhang, and Jingjing Feng. 2022. "Design, Dynamics, and Optimization of a 3-DoF Nonlinear Micro-Gyroscope by Considering the Influence of the Coriolis Force" Micromachines 13, no. 3: 393. https://doi.org/10.3390/mi13030393