
Dimension Reduction Localization Algorithm of Mixed Sources Based on MEMS Vector Hydrophone Array

 , ,
, ,
Abstract
:1. Introduction
2. Mixed Far-Field and Near-Field Vector Model
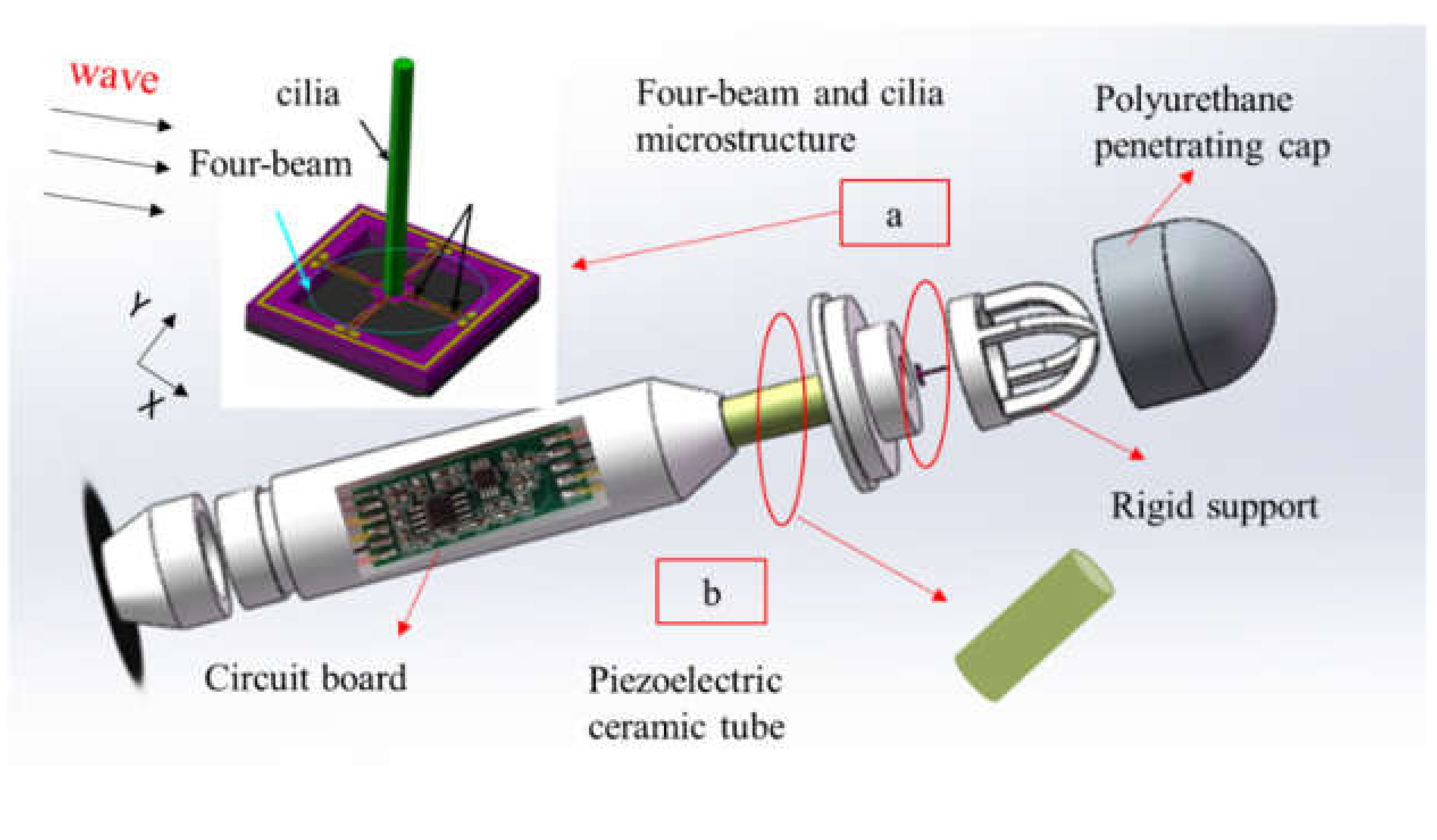
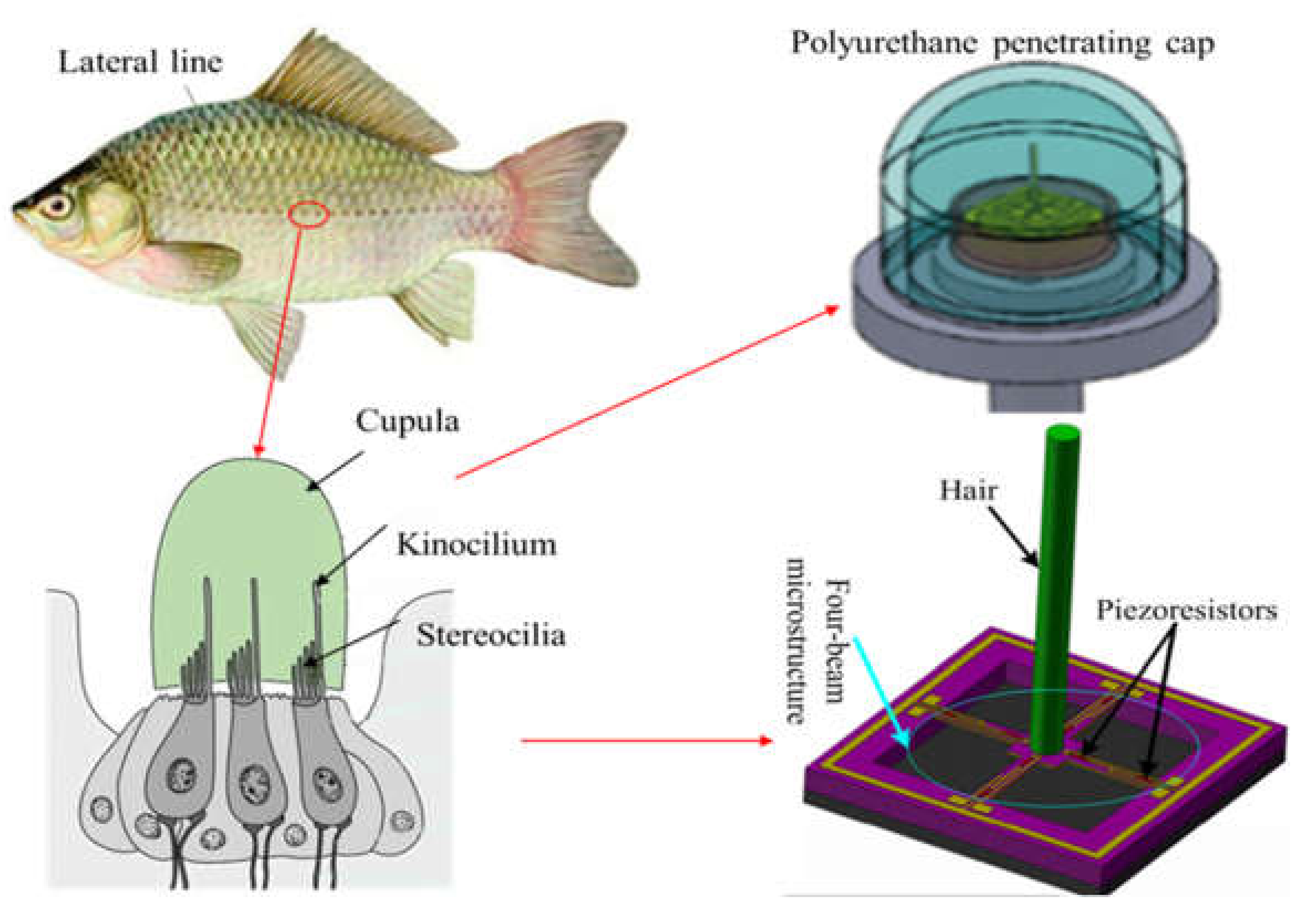
2.1. The Work Principle of Composed MEMS Vector Hydrophone
2.2. The Received Signal Characteristics of Single Vector Hydrophone
2.3. Mixed Far-Field and Near-Field Signal Array Model
- All target signals are independent and narrowband stationary and the noise is the white Gaussian noises;
- In order to avoid ambiguity estimation, make the array element spacing within a quarter wavelength [28];
- The number of sound sources must be less than the number of MEMS hydrophones.
3. Mixed Sources Reduced-Dimension Location Algorithm for Vector Hydrophone Array
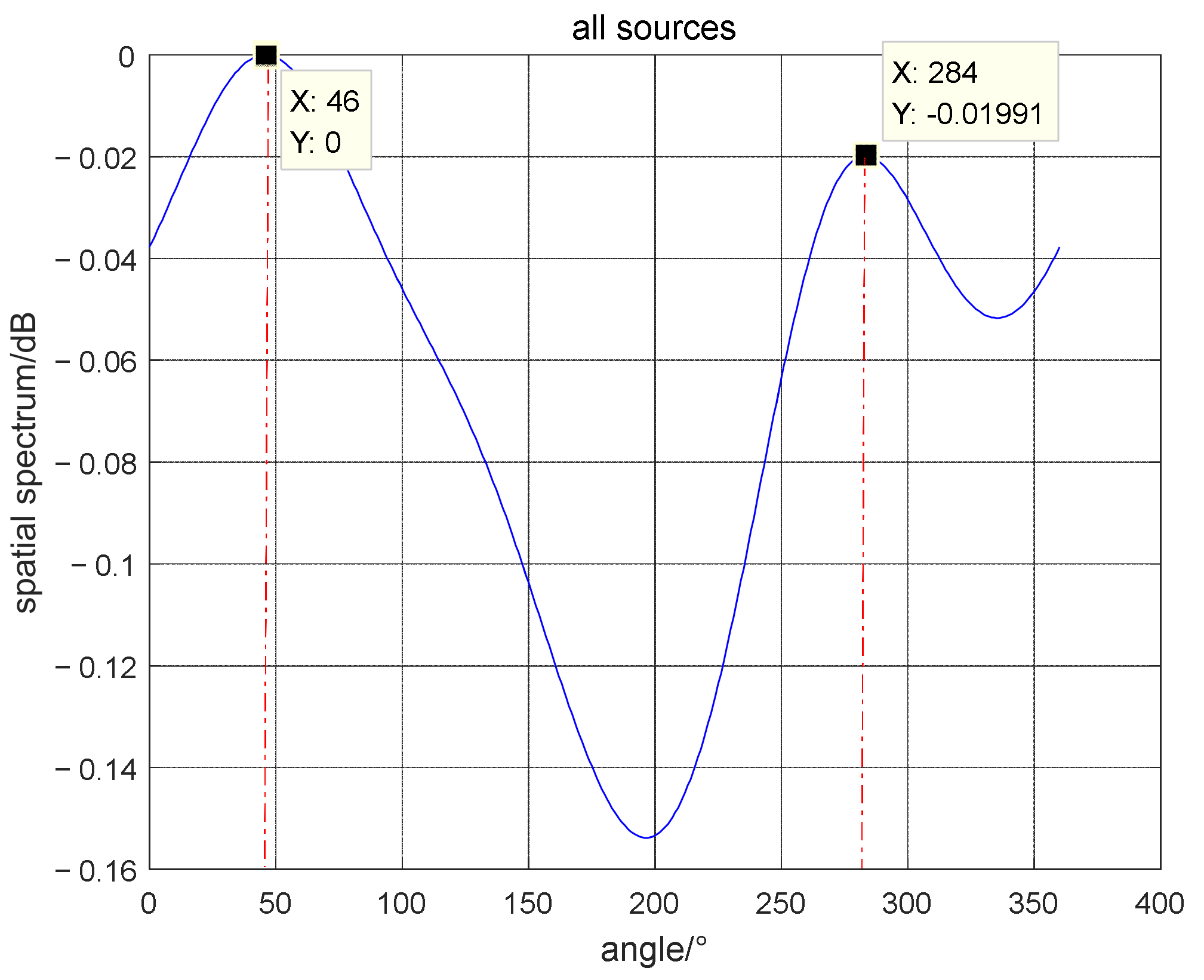
3.1. DOAs Estimate of All Far-Field and Near-Field Sources
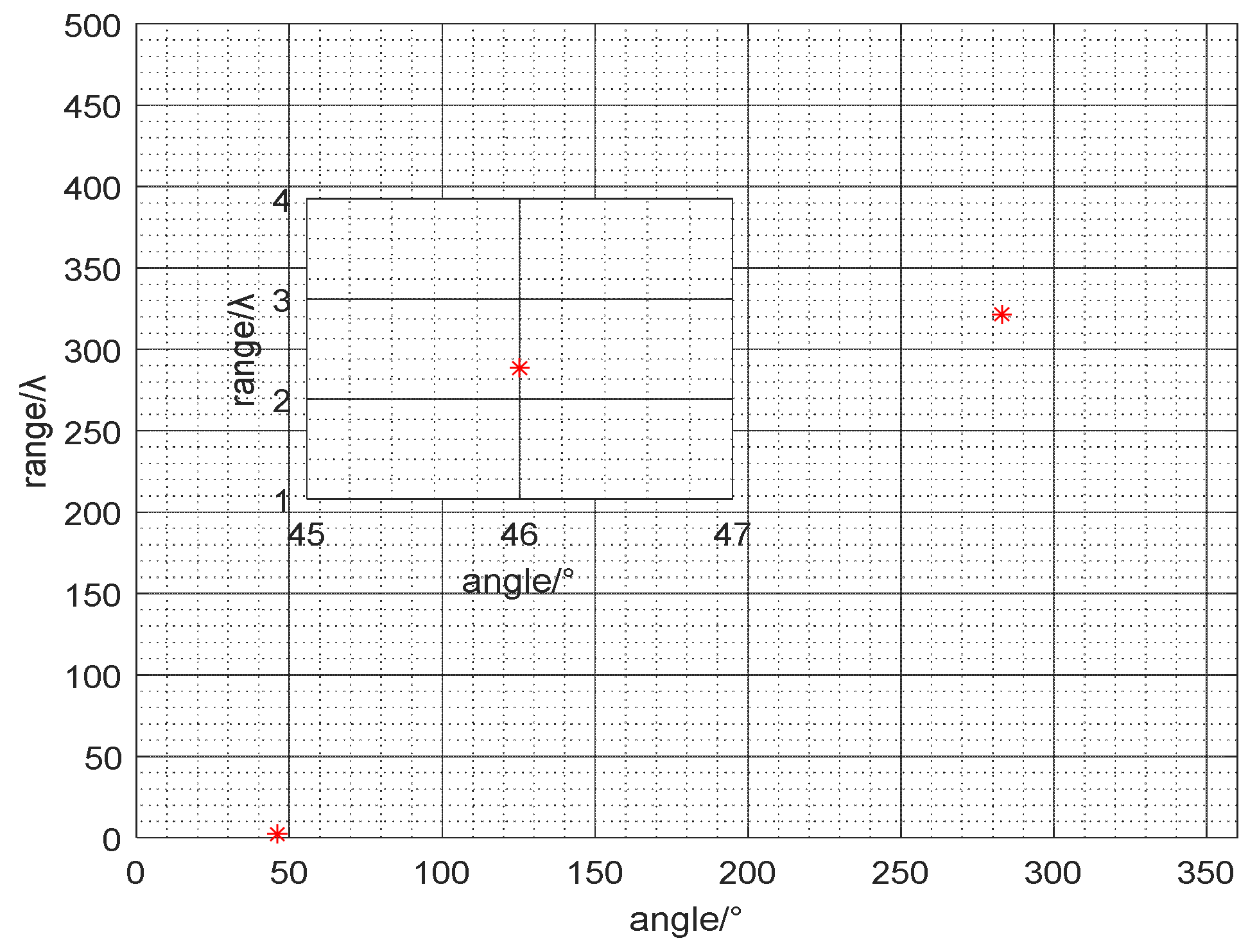
3.2. The Range Estimate of All Far-Field and Near-Field Sources
3.3. The Range Estimate of All Far-Field and Near-Field Sources
3.4. The Computational Complexity Analysis of Proposed Algorithm
4. Simulation of Vector Dimension Reduction Localization Algorithm
4.1. The Computational Complexity Analysis of Proposed Algorithm
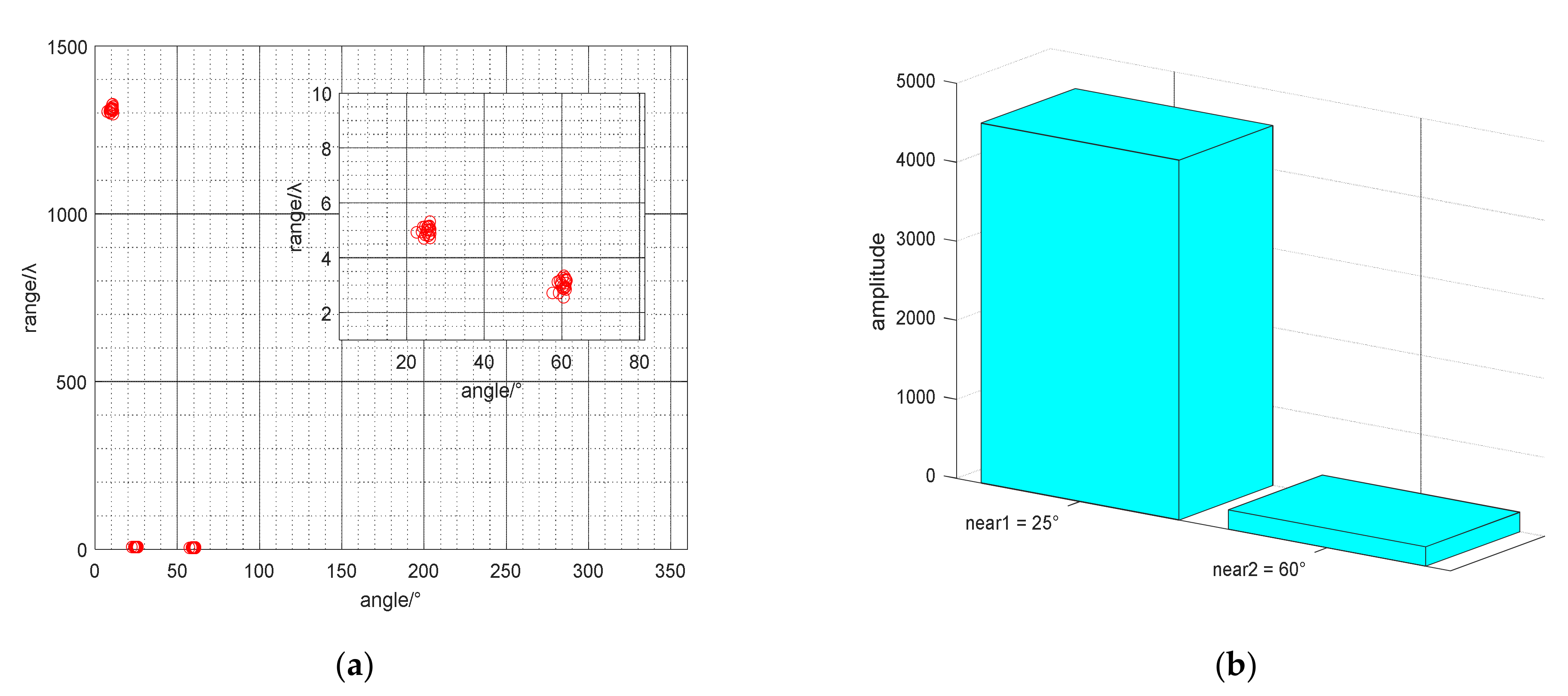
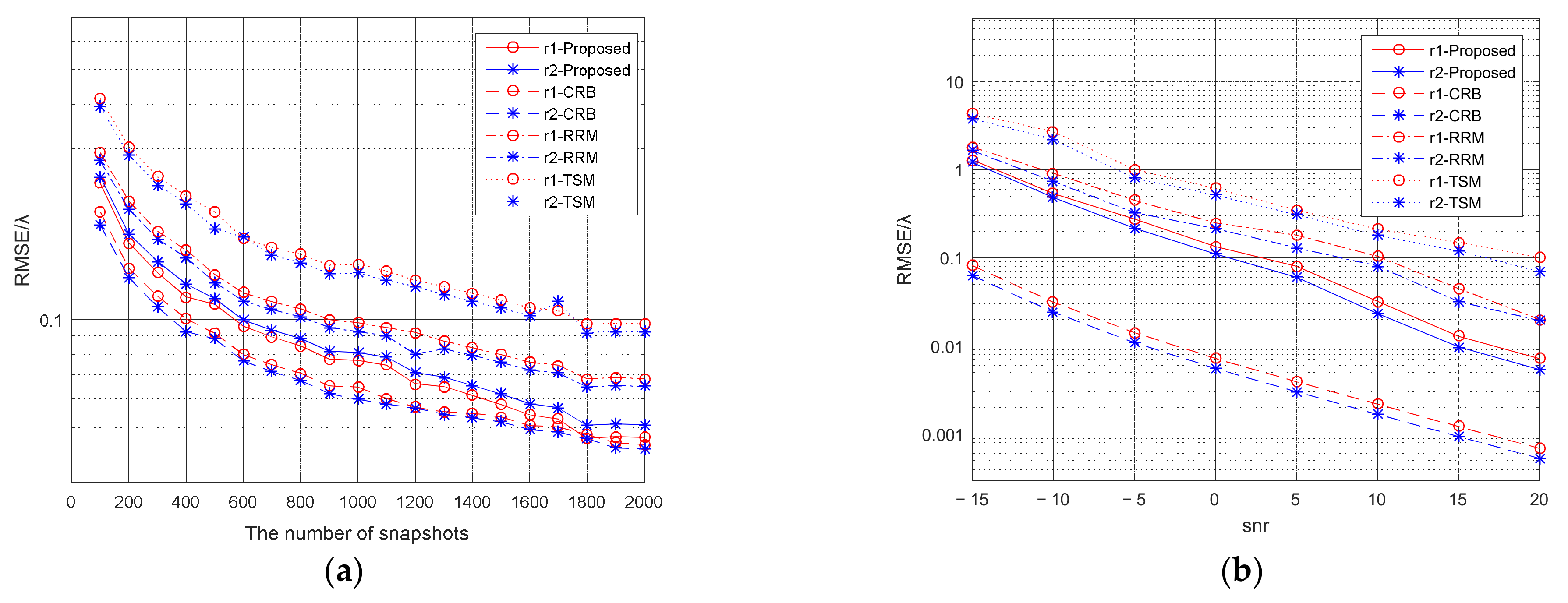
4.2. The Mixed Far-Field and Near-Field Sources Estimation
4.3. The Field Experiment of Mixed Sources Estimation Algorithm
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Urick, R.J. Underwater Acoustic Principle; Harbin Ship Engineering Institute Press: Harbin, China, 1990. [Google Scholar]
- Leslie, C.B.; Kendall, J.M.; Jones, J.L. Hydrophone for measuring particle velocity. Acoust. Soc. Am. 1956, 26, 169–172. [Google Scholar] [CrossRef]
- Zhang, W.D. A NEMS micro-acoustic sensor based on meso-piezoresistance. J. Pure Appl. Ultrason. 2005, 27, 25–28. [Google Scholar]
- Xue, C.; Chen, S.; Zhang, W.; Zhang, B. Design, fabrication, and preliminary characterization of a novel MEMS bionic vector hydrophone. Microelectron. J. 2007, 38, 1021–1026. [Google Scholar] [CrossRef]
- Stoica, P.; Arye, N. MUSIC, maximum likelihood, and Cramer-Rao bound. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 720–741. [Google Scholar] [CrossRef]
- Hawkes, M.; Nehorai, A. Acoustic vector-sensor beamforming and Capon direction estimation. IEEE Trans. Signal Process. 1998, 46, 2291–2304. [Google Scholar] [CrossRef]
- Wong, K.T.; Zoltowski, M.D. Polarization-beamspace self-initiating MUSIC for azimuth/elevation angle estimation. In Proceedings of the Radar 97, Edinburgh, UK, 14–16 October 1997. [Google Scholar]
- Jiajia, J.; Fajie, D.; Jin, C. Mixed near-field and far-field sources localization using the uniform linear sensor array. IEEE Sens. J. 2013, 13, 3136–3143. [Google Scholar]
- Abed-Meraim, K.; Hua, Y.; Belouchrani, A. Second-Order Near-Field Source Localization: Algorithm and Performance Analysis. In Proceedings of the Conference Record of The Thirtieth Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 3–6 November 1996. [Google Scholar]
- Wang, B.; Liu, J.; Sun, X. Mixed sources localization based on sparse signal reconstruction. IEEE Signal Process. Lett. 2012, 19, 487–490. [Google Scholar] [CrossRef]
- Jian, X.; Tao, H.; Xuan, R.; Jia, S. Passive localization of noncircular sources in the near-field. In Proceedings of the 16th International Radar Symposium (IRS), Dresden, Germany, 24–26 June 2015. [Google Scholar]
- Dakulagi, V. A New Approach to Achieve a Trade-Off Between Direction-of-Arrival Estimation Performance and Computational Complexity. IEEE Commun. Lett. 2021, 25, 1183–1186. [Google Scholar] [CrossRef]
- Tian, Y.; Sun, X. Mixed sources localisation using a sparse representation of cumulant vectors. IET Signal Process. 2014, 8, 606–611. [Google Scholar] [CrossRef]
- Liang, J.; Ding, L.J.I.S.J. Passive Localization of Mixed Near-Field and Far-Field Sources Using Two-stage MUSIC Algorithm. IEEE Trans. Signal Process. 2009, 58, 108–120. [Google Scholar] [CrossRef]
- Liu, G.; Sun, X.; Lui, Y.; Qin, Y. Low-complexity estimation of signal parameters via rotational invariance techniques algorithm for mixed far-field and near-field cyclostationary sources localisation. IET Signal Process. 2013, 7, 382–388. [Google Scholar] [CrossRef]
- He, J.; Swamy, M.N.S.; Ahmad, M.O. Efficient application of MUSIC algorithm under the coexistence of far-field and near-field sources. IEEE Trans. Signal Process. 2012, 60, 2066–2070. [Google Scholar] [CrossRef]
- Yang, J.; Hao, C.; Zheng, Z. Localization of mixed near-field and far-field multi-band sources based on sparse representation. Multi. Syst. Signal Process. 2020, 31, 173–190. [Google Scholar] [CrossRef]
- Zheng, Z.; Fu, M.; Wang, W.-Q.; Zhang, S.; Liao, Y. Localization of Mixed Near-Field and Far-Field Sources Using Symmetric Double-Nested Arrays. IEEE Trans. Antennas Propag. 2019, 67, 7059–7070. [Google Scholar] [CrossRef]
- Zuo, W.; Xin, J.; Zheng, N.; Akira, S. Subspace-Based Localization of Far-Field and Near-Field Signals Without Eigendecomposition. IEEE Trans. Signal Process. 2018, 66, 4461–4476. [Google Scholar] [CrossRef]
- Tian, Y.; Lian, Q.; Xu, H. Mixed near-field and far-field source localization utilizing symmetric nested array. Digit. Signal Process. 2018, 73, 16–23. [Google Scholar] [CrossRef]
- Wang, K.; Wang, L.; Shang, J. Mixed near-field and far-field sources localization based on uniform linear array partition. IEEE Sens. J. 2016, 16, 1. [Google Scholar] [CrossRef]
- Wang, W.; Tan, W.J. Alternating Iterative Adaptive Approach for DOA Estimation via Acoustic Vector Sensor Array under Directivity Bias. IEEE Commun. Lett. 2020, 24, 1944–1948. [Google Scholar] [CrossRef]
- Amari, S.I. Natural Gradient Works Efficiently in Learning. Neural Computation. 1999, 10, 251–276. [Google Scholar] [CrossRef]
- Zhikai Huang, B.X.; Wang, W. A Low Complexity Localization Algorithm for Mixed Far-Field and Near-Field Sources. IEEE Commun. Lett. 2021, 25, 3838–3842. [Google Scholar] [CrossRef]
- Molaei, A.M.; Zakeri, B.; Andargoli, S. A one-step algorithm for mixed far-field and near-field sources localization. Digit. Signal Process. 2021, 108, 102899. [Google Scholar] [CrossRef]
- Shang, Z.Z.; Zhang, W.D.; Zhang, G.J.; Zhang, X.Y.; Ji, S.X.; Wang, R.X. Mixed near field and far field sources localization algorithm based on MEMS vector hydrophone array. Measurement 2020, 151, 107109. [Google Scholar] [CrossRef]
- Müller, H.M. Indications for feature detection with the lateral line organ in fish. Comp. Biochem. Physiol. Part A Physiol. 1996, 114, 257–263. [Google Scholar] [CrossRef]
- Zheng, Z.; Fu, M.; Jiang, D.; Wang, W.-Q.; Zhang, S. Localization of mixed far-field and near-field sources via cumulant matrix reconstruction. IEEE Sens. J. 2018, 18, 7671–7680. [Google Scholar] [CrossRef]
- Wax, M.; Kailath, T. Detection of signals by information theoretic criteria. IEEE Trans. Signal Process. 1985, 33, 387–392. [Google Scholar] [CrossRef] [Green Version]
- Tao, L.; Nehorai, A. Maximum Likelihood Direction-of-Arrival Estimation of Underwater Acoustic Signals Containing Sinusoidal and Random Components. IEEE Trans. Signal Process. 2011, 59, 5302–5314. [Google Scholar] [CrossRef]
- Delmas, J.P.; Korso, M.N.E.; Gazzah, H.; Castella, M. CRB analysis of planar antenna arrays for optimizing near-field source localization. Signal Process. 2016, 127, 117–134. [Google Scholar] [CrossRef] [Green Version]
- Liu, C.L.; Vaidyanathan, P.P. Cramér-Rao Bounds for Coprime and Other Sparse Arrays, which Find More Sources than Sensors. Digit. Signal Process. 2017, 61, 43–61. [Google Scholar] [CrossRef] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Computational Complexity |
|---|---|
| RRM | |
| TSM | |
| Proposed |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shang, Z.; Yang, L.; Zhang, W.; Zhang, G.; Zhang, X.; Kou, H. Dimension Reduction Localization Algorithm of Mixed Sources Based on MEMS Vector Hydrophone Array. Micromachines 2022, 13, 626. https://doi.org/10.3390/mi13040626
Shang Z, Yang L, Zhang W, Zhang G, Zhang X, Kou H. Dimension Reduction Localization Algorithm of Mixed Sources Based on MEMS Vector Hydrophone Array. Micromachines. 2022; 13(4):626. https://doi.org/10.3390/mi13040626
Chicago/Turabian StyleShang, Zhenzhen, Libo Yang, Wendong Zhang, Guojun Zhang, Xiaoyong Zhang, and Hairong Kou. 2022. "Dimension Reduction Localization Algorithm of Mixed Sources Based on MEMS Vector Hydrophone Array" Micromachines 13, no. 4: 626. https://doi.org/10.3390/mi13040626