
A Novel Temperature Drift Error Precise Estimation Model for MEMS Accelerometers Using Microstructure Thermal Analysis


Abstract
:1. Introduction
2. Methodology
2.1. TDE Estimation Model Establishment
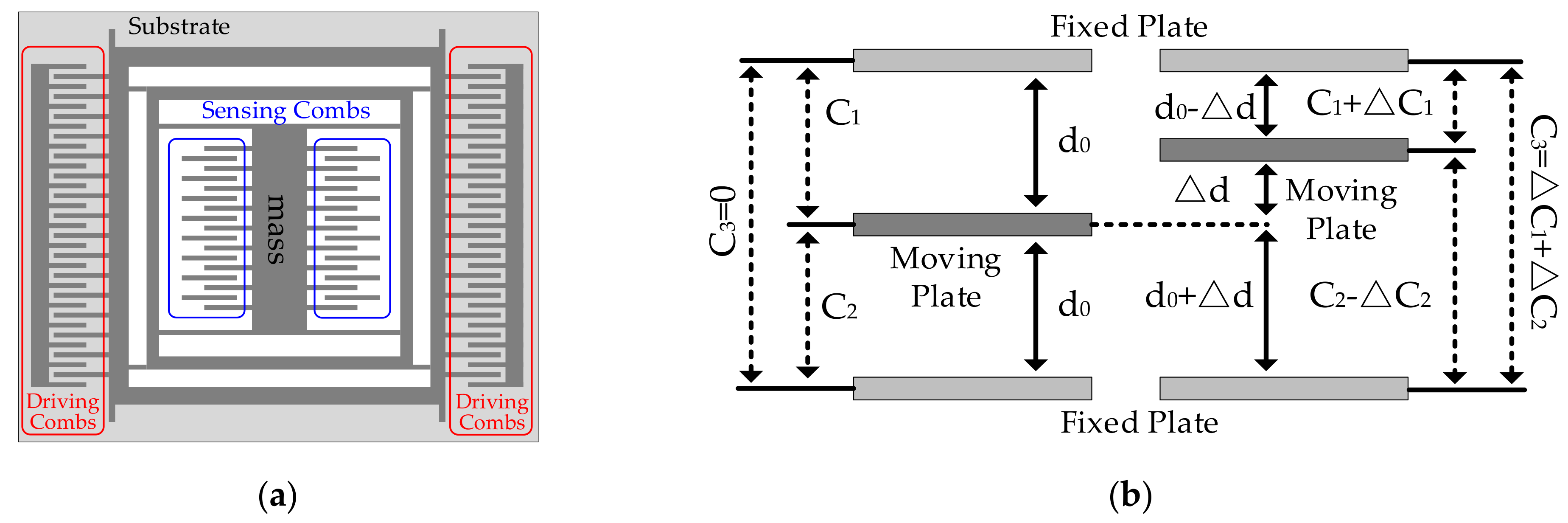
2.1.1. Conventional Estimation Model for TDE
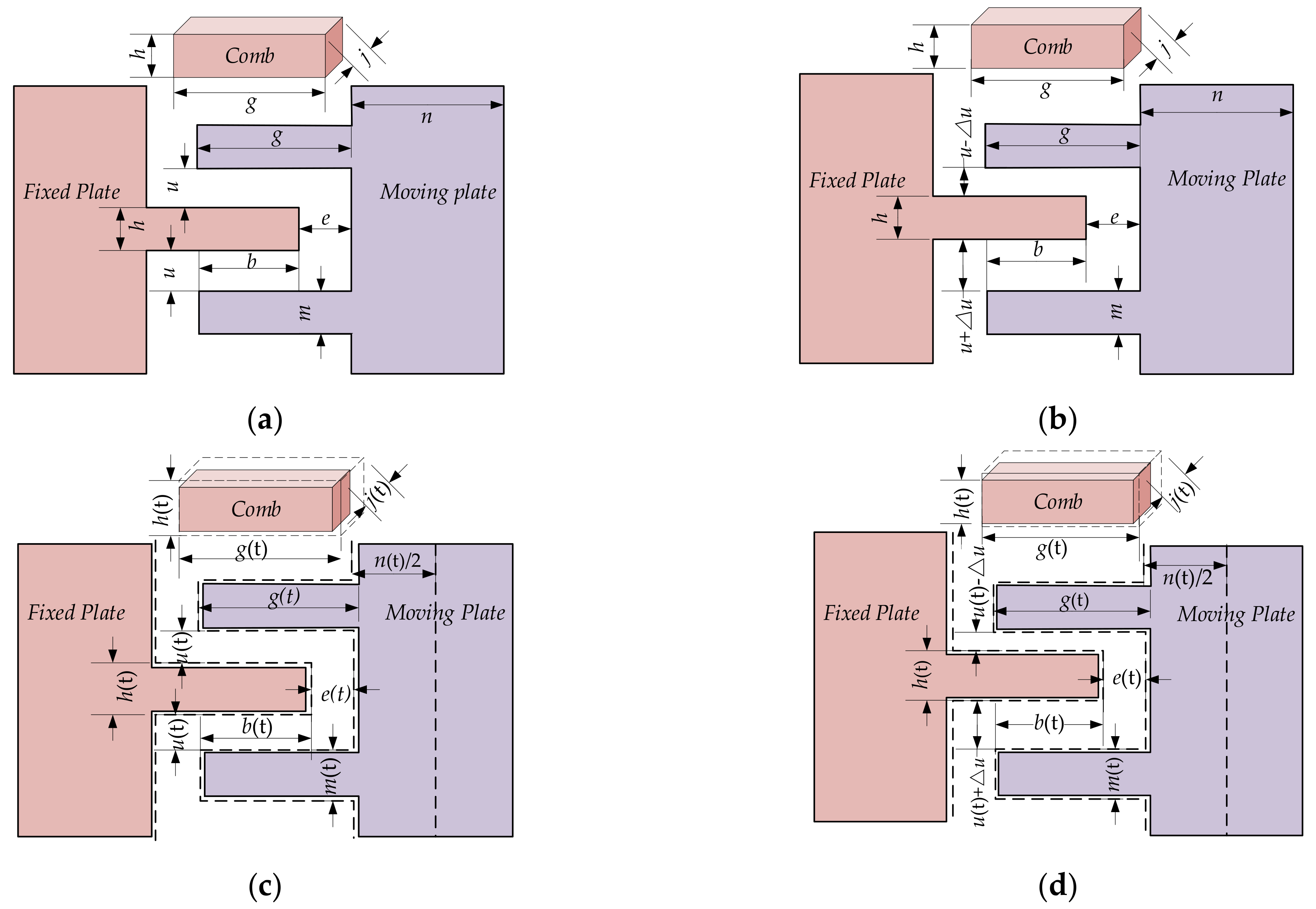
2.1.2. Microstructure Analysis of Si-Based Material under Temperature Variation
2.1.3. Modification of the Conventional TDE Precise Estimation Model
2.2. Parameter Identification Optimization for Novel TDE Precise Estimation Model
2.2.1. TDE Test Method
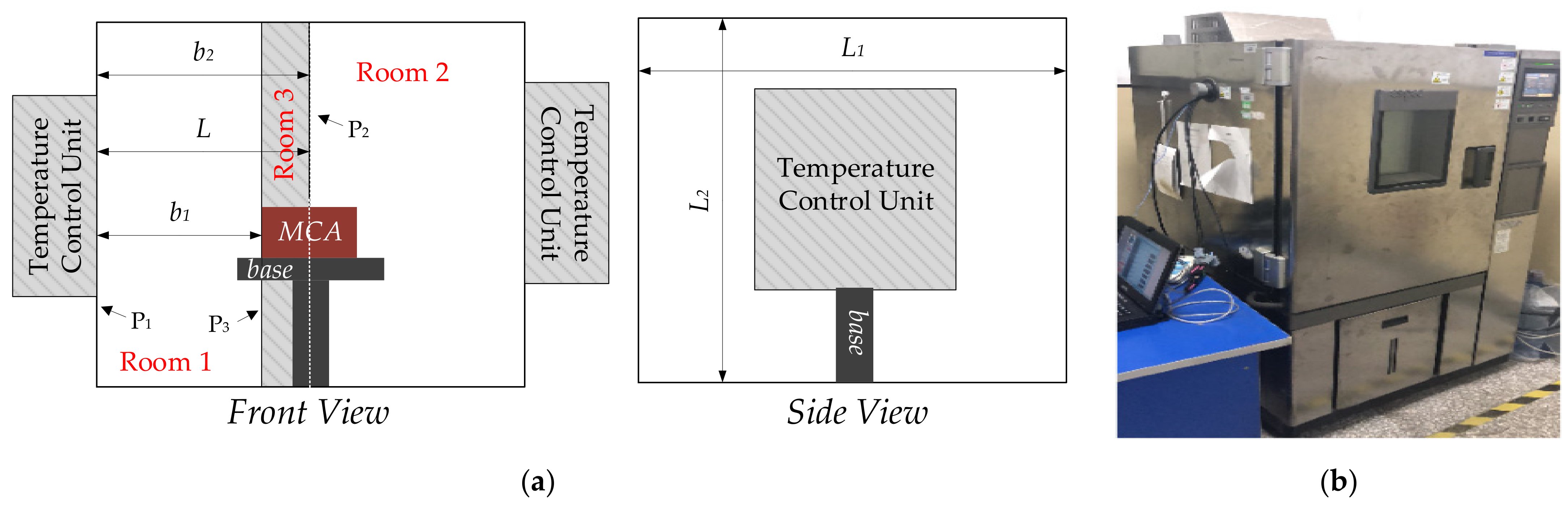
- Heat conduction measures
- 2.
- Precise temperature measurement system
- 3.
- Reasonable temperature control period
- IIS328DQ is installed on the base of thermal chamber, its measuring direction is vertically down and its true value 1 g. Temperature sensors for the precise temperature measurement system are attached on it. Wireless transmission module sends test results and PC is prepared to receive its temperature Ta and its output Da.
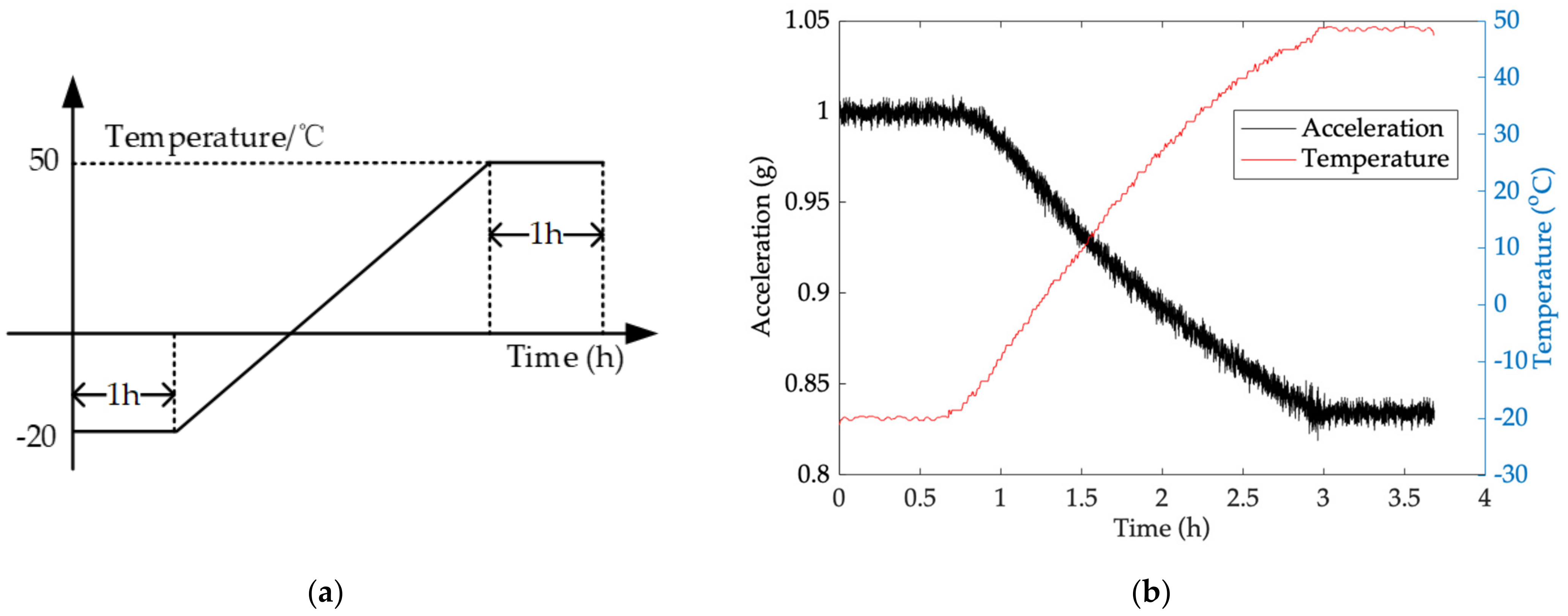
- Cool thermal chamber to lower limit of the rated operating temperature range −20 °C, and keep Ta and Da recording for 1 h after ambient temperature stays stable.
- Heat thermal chamber to higher limit of the rated operating temperature range 50 °C at a rate of 41 °C/h, which is 0.4 °C per 35 s. When Ta goes to 50 °C, stop the test until it stays stable for an hour.
- Repeat step (2) to (3) three times, and choose one of them randomly as the test results.
2.2.2. Implementation of Novel Model Based on PSO-GA-BPNN
3. Experiments and Analysis
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Cai, Q.; Zhao, F.J.; Kang, Q.; Luo, Z.Q.; Hu, D.; Liu, J.W.; Cao, H.L. A Novel Parallel Processing Model for Noise Reduction and Temperature Compensation of MEMS Gyroscope. Micromachines 2021, 12, 1285. [Google Scholar] [CrossRef] [PubMed]
- Shen, X.; Yuan, D.; Chang, R.; Jin, W. A Nonlinear Observer for Attitude Estimation of Vehicle-Mounted Satcom-on-the-Move. IEEE Sens. J. 2019, 19, 8057–8066. [Google Scholar] [CrossRef]
- Mansoorzare, H.; Todi, A.; Moradian, S.; Abdolvand, R. A Piezo-Capacitive High-Frequency Resonant Accelerometer. In Proceedings of the 2020 IEEE International Ultrasonics Symposium (IUS), Las Vegas, NV, USA, 7–11 September 2020. [Google Scholar]
- Cai, P.C.; Xiong, X.Y.; Wang, K.F.; Wang, J.W.; Zou, X.D. An Improved Difference Temperature Compensation Method for MEMS Resonant Accelerometers. Micromachines 2021, 12, 1022. [Google Scholar] [CrossRef]
- Chang, H.W.; Georgy, J.; El-Sheimy, N. Improved cycling navigation using inertial sensors measurements from portable devices with arbitrary orientation. IEEE Trans. Instrum. Meas. 2015, 64, 2012–2019. [Google Scholar] [CrossRef]
- Isobe, A.; Kamada, Y.; Takubo, C.; Furubayashi, Y.; Oshima, T.; Sakuma, N.; Sekiguchi, T. Design of Perforated Membrane for Low-Noise Capacitive MEMS Accelerometers. IEEE Sens. J. 2020, 20, 1184–1190. [Google Scholar] [CrossRef]
- Guan, R.; He, C.H.; Liu, D.; Zhao, Q.; Yang, Z.; Yan, G. A temperature control system used for improving resonant frequency drift of MEMS gyroscopes. In Proceedings of the 10th IEEE International Conference on Nano/Micro Engineered and Molecular Systems, Xi’an, China, 7–11 April 2015. [Google Scholar]
- Maspero, F.; Delachanal, S.; Berthelot, A.; Joet, L.; Langfelder, G.; Hentz, S. Quarter-mm2 High Dynamic Range Silicon Capacitive Accelerometer With a 3D Process. IEEE Sens. J. 2020, 20, 689–699. [Google Scholar] [CrossRef]
- Wang, X.; Bleiker, S.J.; Edinger, P.; Errando-Herranz, C.; Roxhed, N.; Stemme, G.; Gylfason, K.B.; Niklaus, F. Wafer-Level Vacuum Sealing by Transfer Bonding of Silicon Caps for Small Footprint and Ultra-Thin MEMS Packages. J. Microelectromech. Syst. 2019, 28, 460–471. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Wei, X.; Gao, Y.; Cretu, E. Analytical Study and Thermal Compensation for Capacitive MEMS Accelerometer With Anti-Spring Structure. J. Microelectromech. Syst. 2020, 29, 1389–1400. [Google Scholar] [CrossRef]
- Yin, Y.; Fang, Z.; Liu, Y.; Han, F. Temperature-Insensitive Structure Design of Micromachined Resonant Accelerometers. Sensors 2019, 19, 1544. [Google Scholar] [CrossRef] [Green Version]
- Mo, Y.; Yang, J.; Peng, B.; Xie, G.; Tang, B. Design and verification of a structure for isolating stress in sandwich MEMS accelerometer. Microsyst. Techno. 2021, 27, 1943–1950. [Google Scholar] [CrossRef]
- Wang, Y.; Zhao, X.; Wen, D. Fabrication and Characteristics of a Three-Axis Accelerometer with Double L-Shaped Beams. Sensors 2020, 20, 1780. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Krysko, V.A.; Awrejcewicz, J.; Yakovleva, T.V.; Kirichenko, A.V.; Szymanowska, O.; Krysko, V.A. Mathematical modeling of MEMS elements subjected to external forces, temperature and noise, taking account of coupling of temperature and deformation fields as well as a nonhomogenous material structure. Commun. Nonlinear Sci. Numer. Simul. 2019, 72, 39–58. [Google Scholar] [CrossRef]
- Maj, C.; Szermer, M.; Zajac, P.; Amrozik, P. Analytical modelling of MEMS Z-axis comb-drive accelerometer. In Proceedings of the 2019 20th International Conference on Thermal; Mechanical and Multi-Physics Simulation and Experiments in Microelectronics and Microsystems (EuroSimE), Hannover, Germany, 24–27 March 2019. [Google Scholar]
- Kim, B.; Hopcroft, M.A.; Candler, R.N.; Jha, C.M.; Agarwal, M.; Melamud, R.; Chandorkar, S.A.; Yama, G.; Kenny, T.W. Temperature Dependence of Quality Factor in MEMS Resonators. J. Microelectromech. Syst. 2008, 17, 755–766. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Tian, Y.; Dan, J.; Bi, Z.; Zheng, J.; Li, B. Simulation-Based Design and Optimization of Accelerometers Subject to High-Temperature and High-Impact Loads. Sensors 2019, 19, 3759. [Google Scholar] [CrossRef] [Green Version]
- Qi, B.; Wen, F.Z.; Liu, F.M.; Cheng, J.H. Modification of MTEA-Based Temperature Drift Error Compensation Model for MEMS-Gyros. Sensors 2020, 20, 2906. [Google Scholar] [CrossRef] [PubMed]
- Dai, G.; Li, M.; He, X.; Du, L.; Shao, B.; Su, W. Thermal drift analysis using a multiphysics model of bulk silicon MEMS capacitive accelerometer. Sens. Actuators Phys. 2011, 172, 369–378. [Google Scholar] [CrossRef]
- Basarab, M.; Giani, A.; Combette, P. Thermal Accelerometer Simulation by the R-Functions Method. Appl. Sci. 2020, 10, 8373. [Google Scholar] [CrossRef]
- Cheng, J.; Fang, J.; Wu, W.; Li, J. Temperature drift modeling and compensation of RLG based on PSO tuning SVM. Measurement 2014, 55, 246–254. [Google Scholar] [CrossRef]
- Pan, Y.J.; Li, L.L.; Ren, C.H.; Luo, H.L. Study on the compensation for a quartz accelerometer based on a wavelet neural network. Meas. Sci. Technol. 2010, 21, 105202. [Google Scholar] [CrossRef]
- Xu, D.; Yang, Z.; Zhao, H.; Zhou, X. A temperature compensation method for MEMS accelerometer based on LM-BP neural network. In Proceedings of the 2016 IEEE SENSORS, Orlando, FL, USA, 30 October–3 November 2016. [Google Scholar]
- Wang, S.; Zhu, W.; Shen, Y.; Ren, J.; Gu, H.; Wei, X. Temperature compensation for MEMS resonant accelerometer based on genetic algorithm optimized backpropagation neural network. Sens. Actuators Phys. 2020, 316, 112393. [Google Scholar] [CrossRef]
- Ma, P.; Jia, Y.; Prashanth, K.G.; Yu, Z.; Li, C.; Zhao, J.; Yang, S.; Huang, L. Effect of Si content on the microstructure and properties of Al-Si alloys fabricated using hot extrusion. J. Mater. Res. 2017, 32, 2210–2217. [Google Scholar] [CrossRef]
- Saeed, P.; Alaeiyan, M.H. A combination of curve fitting algorithms to collect a few training samples for function approximation. J. Math. Comput. Sci. 2017, 17, 355–364. [Google Scholar]
- Ren, K.; Zheng, T.H.; Qin, Z.; Liu, X. Adversarial Attacks and Defenses in Deep Learning. Engineering 2020, 6, 346–360. [Google Scholar] [CrossRef]
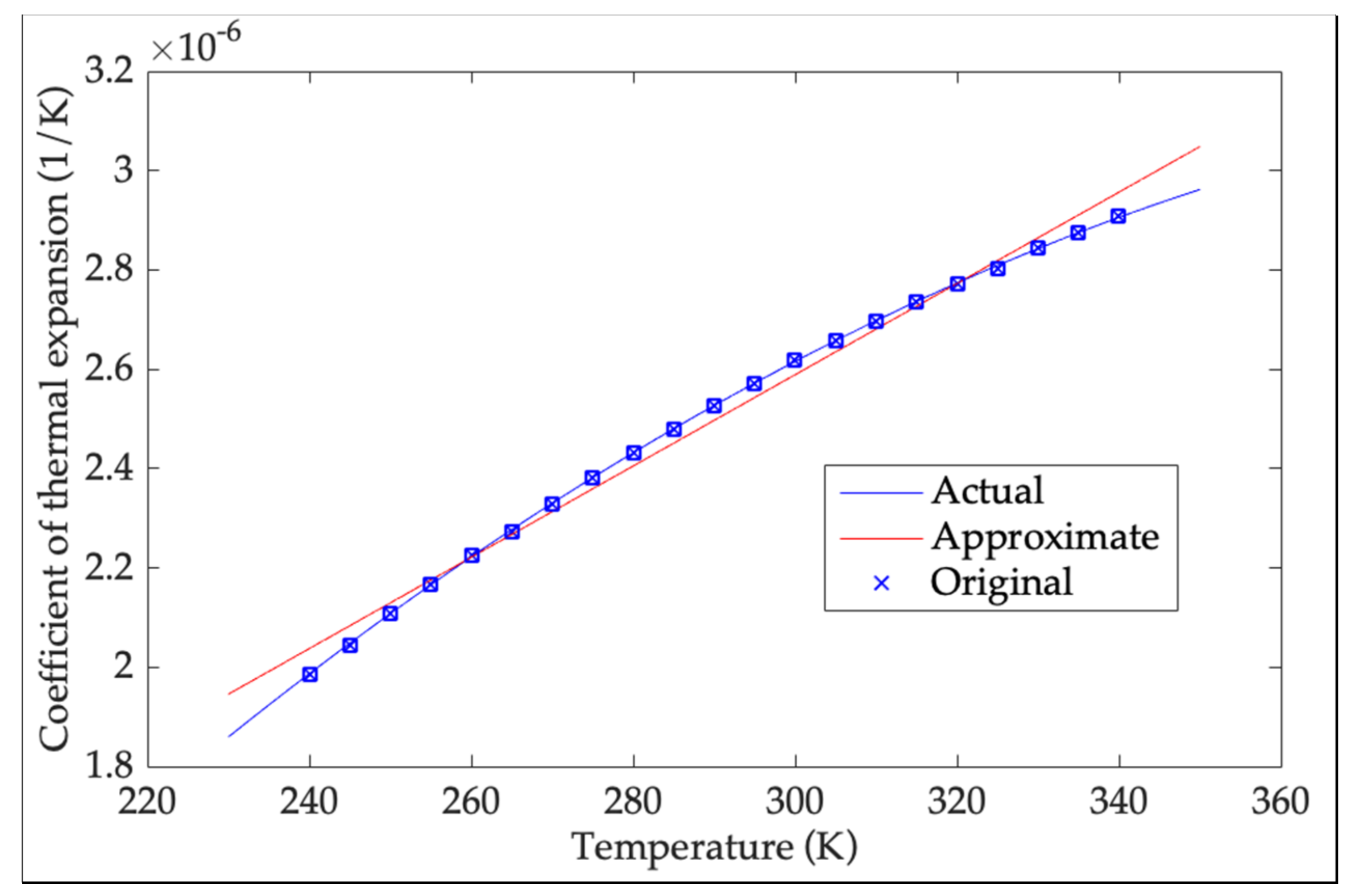
- Lyon, G.; Salinger, G.L.; Swenson, C.A.; White, G.K. Linear thermal expansion measurements on silicon from 6 to 340K. J. Appl. Phys. 1977, 48, 865–868. [Google Scholar] [CrossRef]
- Yang, Y.; Liu, Y.; Liu, Y.H.; Zhao, X.D. Temperature Compensation of MEMS Gyroscope Based on Support Vector Machine Optimized by GA. In Proceedings of the 2019 IEEE Symposium Series on Computational Intelligence (SSCI), Xiamen, China, 6–9 December 2019. [Google Scholar]
- Karnawat, S.; Rufus, E.; Karar, V.; Poddar, S. Accelerometer to accelerometer calibration using particle swarm optimization. In Proceedings of the 2017 2nd IEEE International Conference on Recent Trends in Electronics, Information & Communication Technology (RTEICT), Bangalore, India, 19–20 May 2017. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test 1 | Test 2 | Test 3 | |
|---|---|---|---|
| Conventional model | 8.43 × 10−6 | 1.81 × 10−6 | 9.62 × 10−6 |
| Model 1 | 8.16 × 10−6 | 1.73 × 10−6 | 9.07 × 10−6 |
| Model 2 | 7.16 × 10−6 | 1.55 × 10−6 | 8.37 × 10−6 |
| Model 3 | 7.08 × 10−6 | 1.53 × 10−6 | 8.17 × 10−6 |
| Q1 | 3.20% | 4.42% | 5.72% |
| Q2 | 15.06% | 14.36% | 12.99% |
| Q3 | 16.01% | 15.47% | 15.07% |
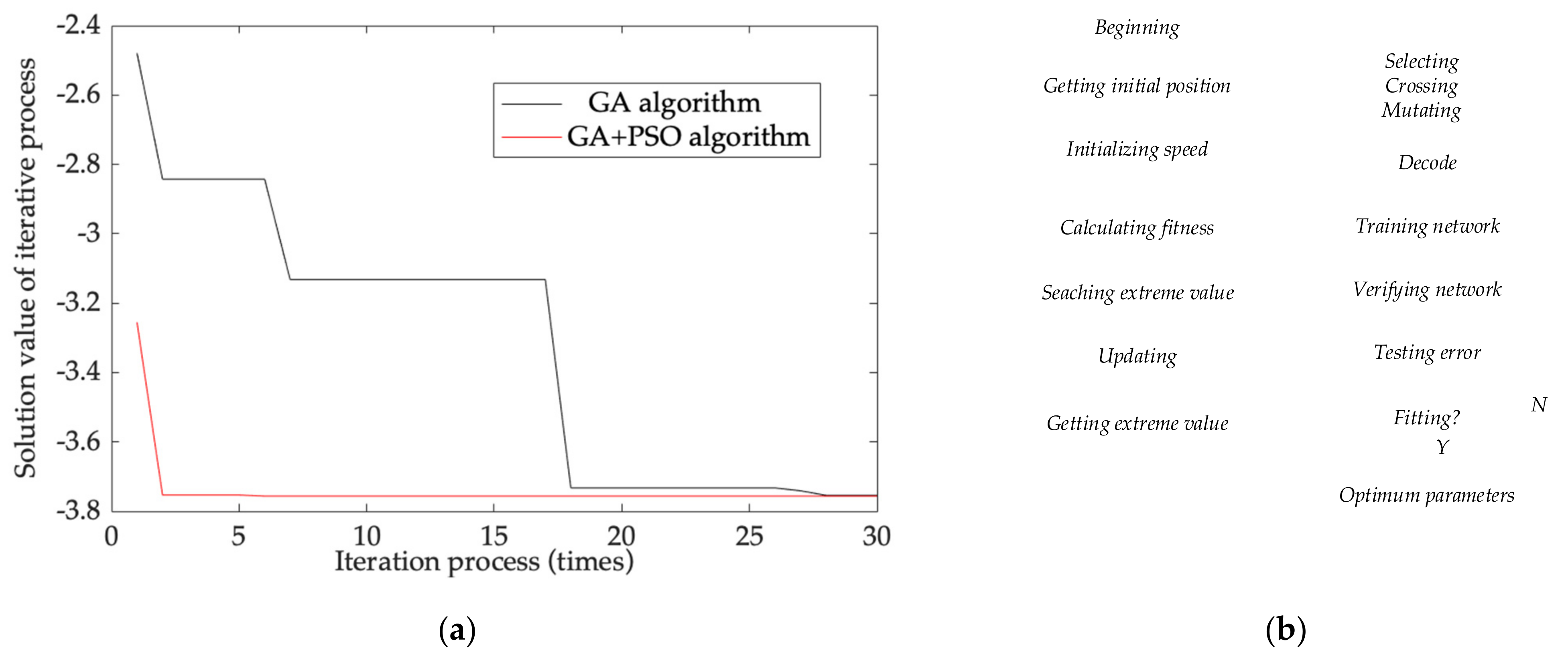
| Iteration | Model 2 | Model 3 | Iteration Effect |
|---|---|---|---|
| 14 | 1.51 × 10−3 | 1.17 × 10−4 | 92.25% |
| 28 | 6.50 × 10−4 | 7.40 × 10−6 | 99.86% |
| 42 | 2.62 × 10−5 | 7.26 × 10−6 | 72.30% |
| 56 | 7.24 × 10−6 | 7.17 × 10−6 | 0.90% |
| 70 | 7.16 × 10−6 | 7.08 × 10−6 | 1.11% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qi, B.; Shi, S.; Zhao, L.; Cheng, J. A Novel Temperature Drift Error Precise Estimation Model for MEMS Accelerometers Using Microstructure Thermal Analysis. Micromachines 2022, 13, 835. https://doi.org/10.3390/mi13060835
Qi B, Shi S, Zhao L, Cheng J. A Novel Temperature Drift Error Precise Estimation Model for MEMS Accelerometers Using Microstructure Thermal Analysis. Micromachines. 2022; 13(6):835. https://doi.org/10.3390/mi13060835
Chicago/Turabian StyleQi, Bing, Shuaishuai Shi, Lin Zhao, and Jianhua Cheng. 2022. "A Novel Temperature Drift Error Precise Estimation Model for MEMS Accelerometers Using Microstructure Thermal Analysis" Micromachines 13, no. 6: 835. https://doi.org/10.3390/mi13060835