
Vibration Characteristics and Experimental Research of Combined Beam Tri-Stable Piezoelectric Energy Harvester


Abstract
:1. Introduction
2. Structure and Theoretical Model of CTPEH
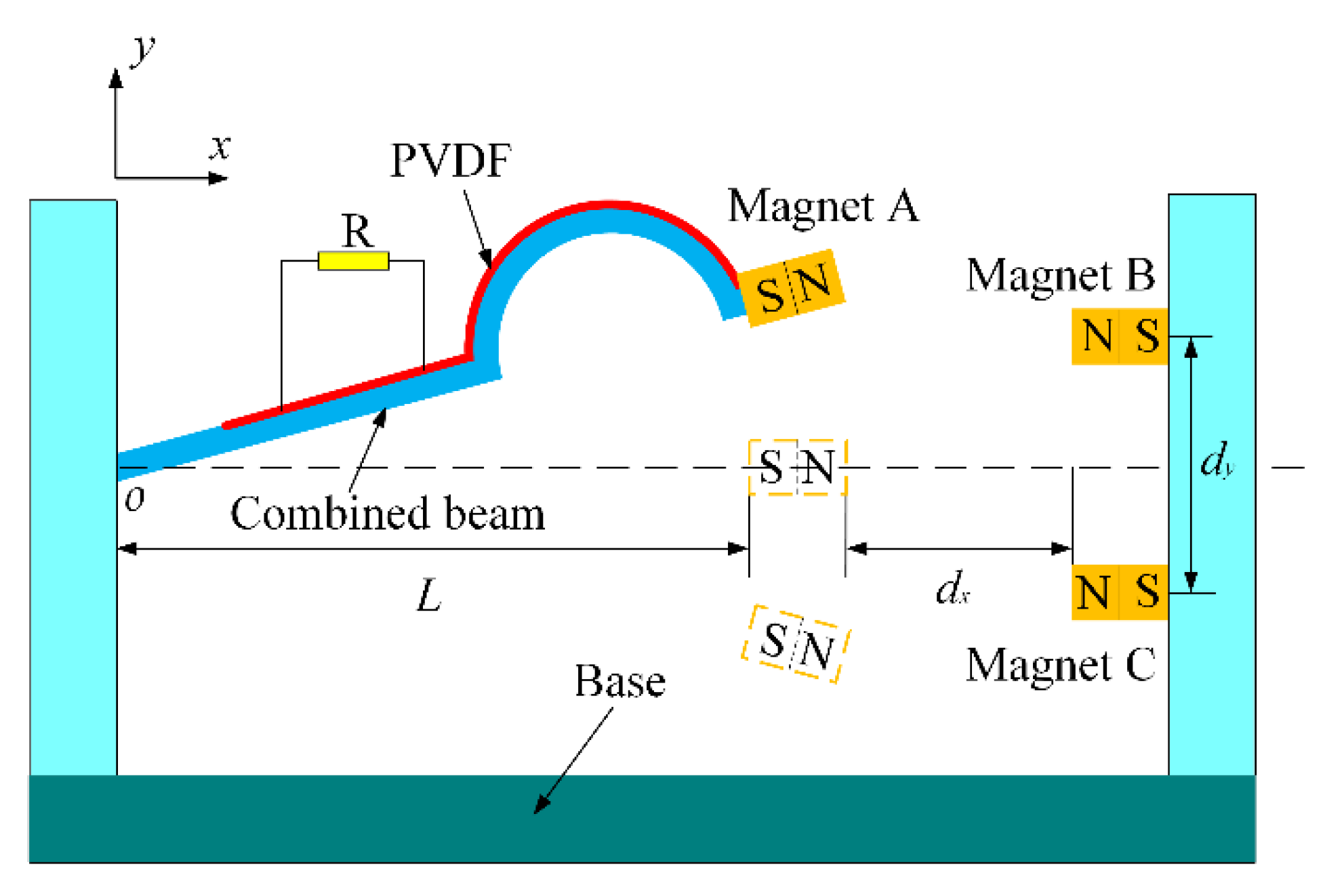
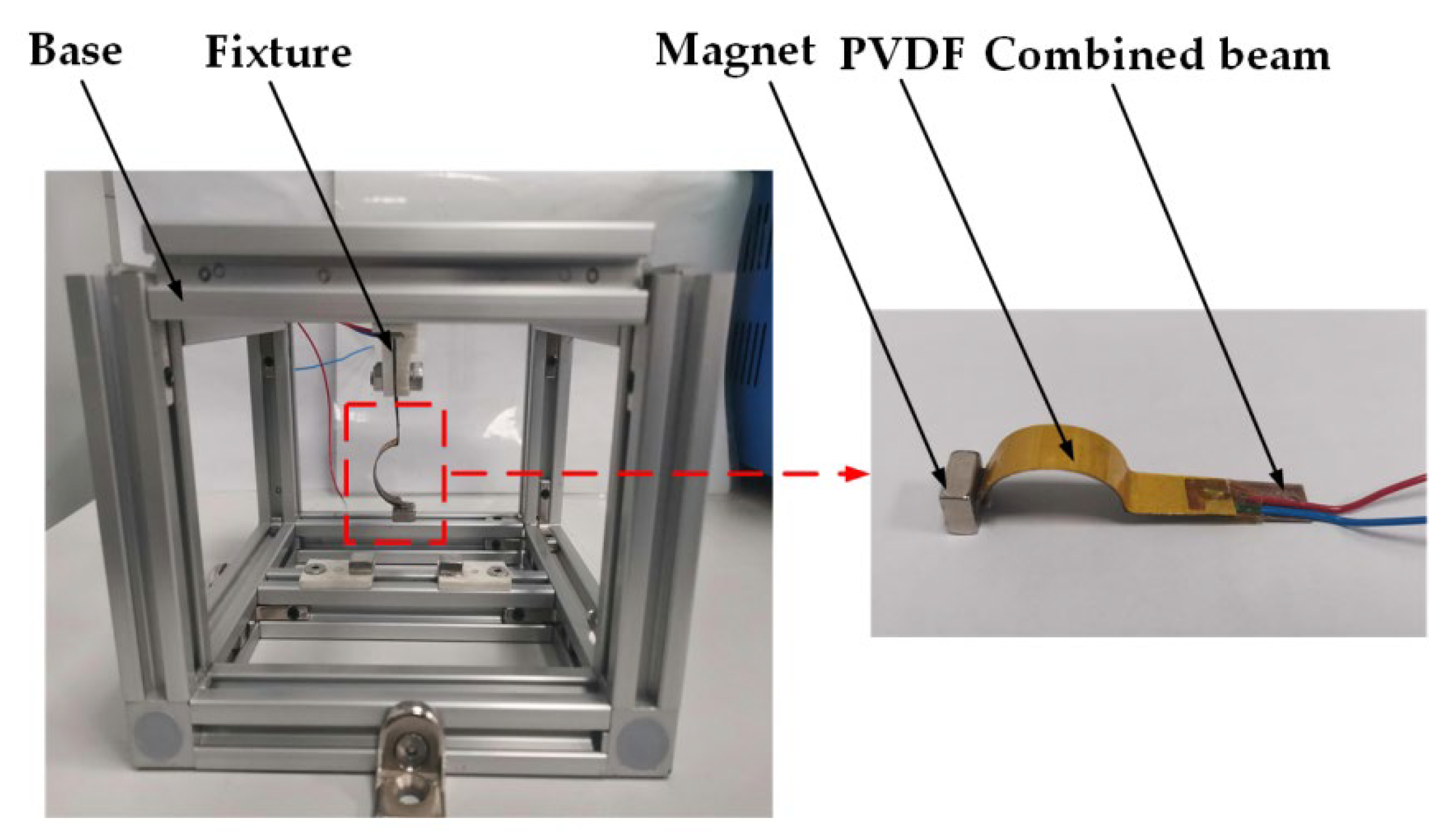
2.1. Structure of CTPEH
2.2. Theoretical Model of CTPEH
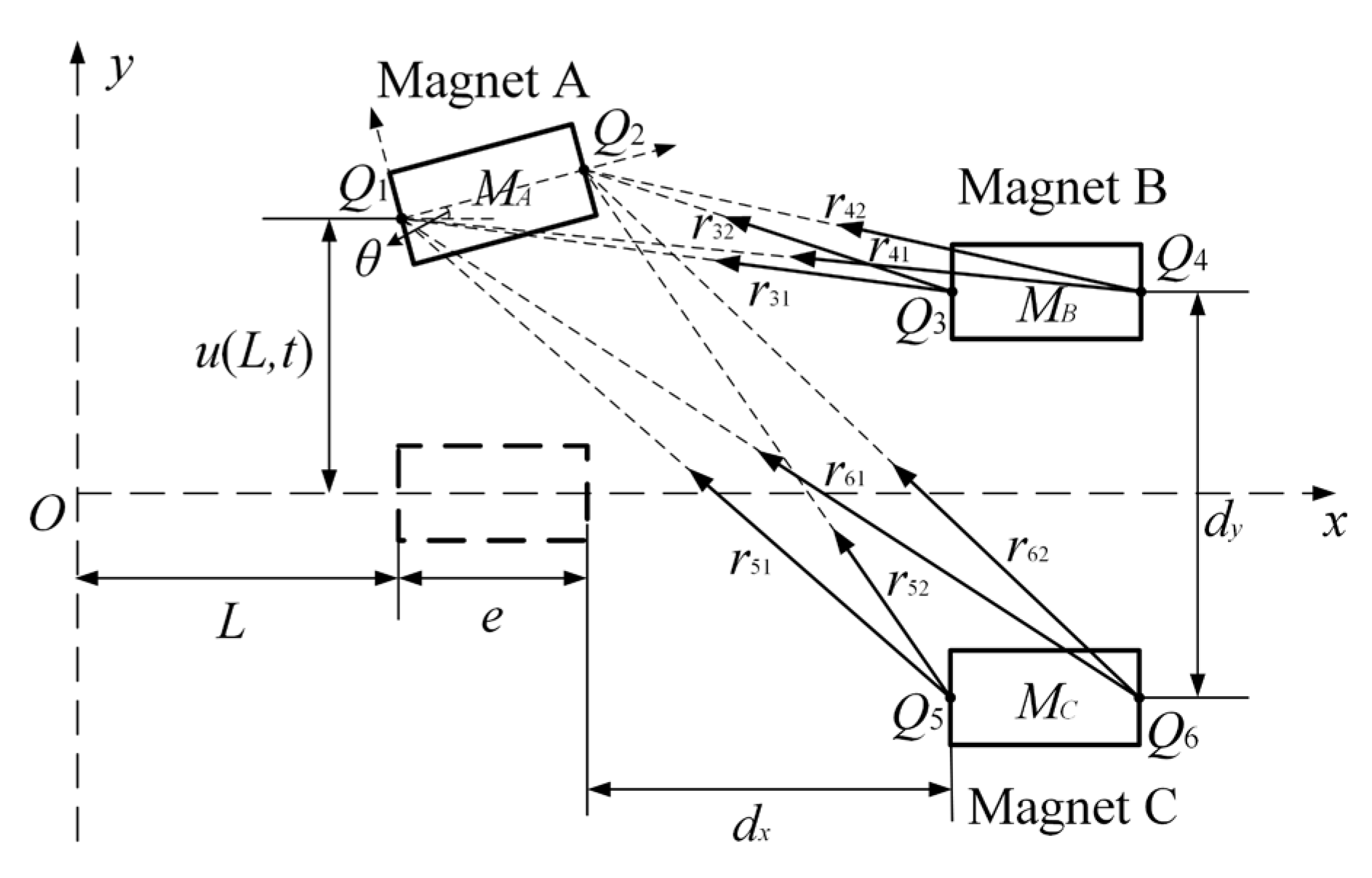
2.2.1. Nonlinear Magnetic Force Model
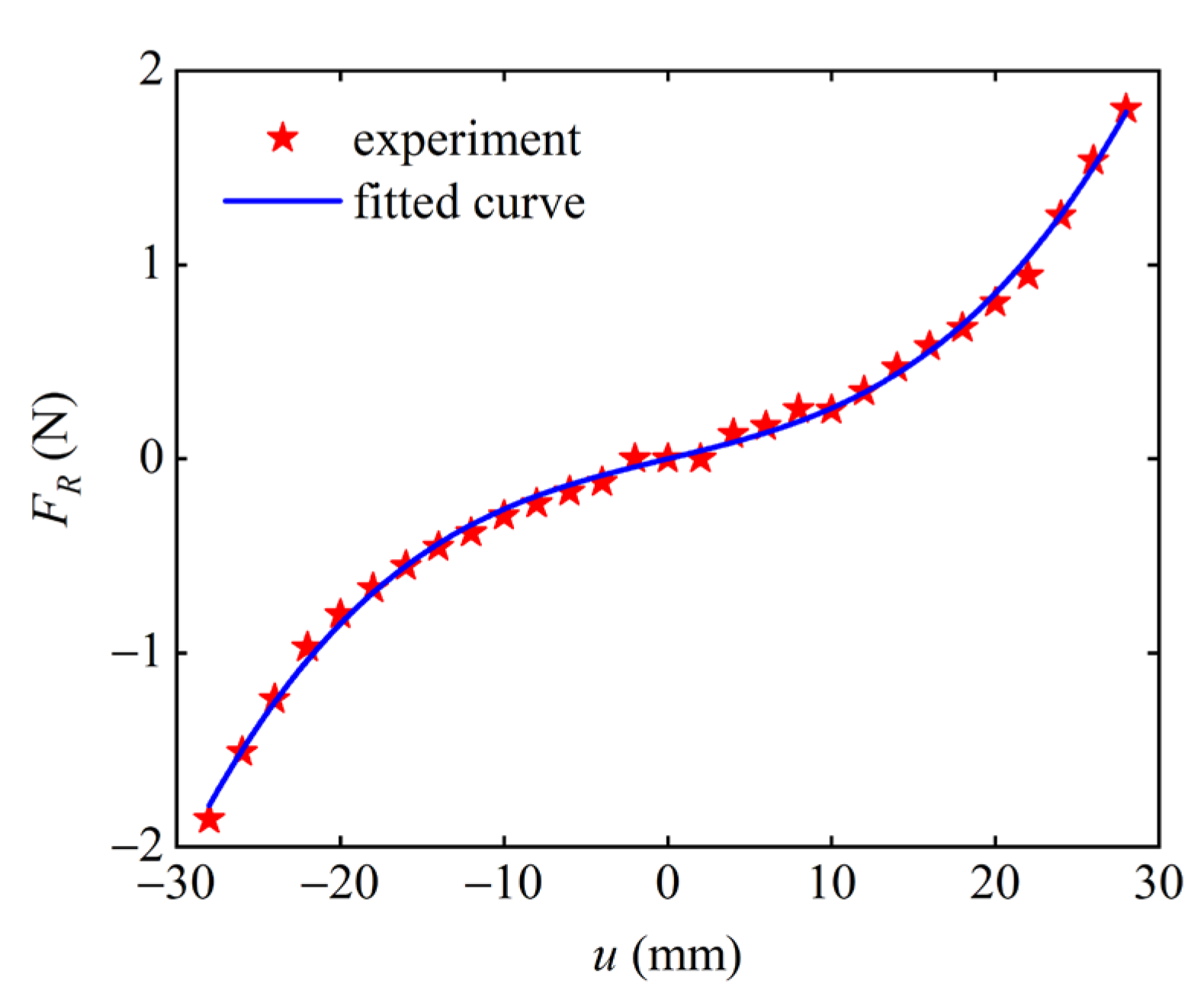
2.2.2. Nonlinear Restoring Force Model
2.2.3. Dynamic Model of CTPEH
3. Numerical Simulation of CTPEH
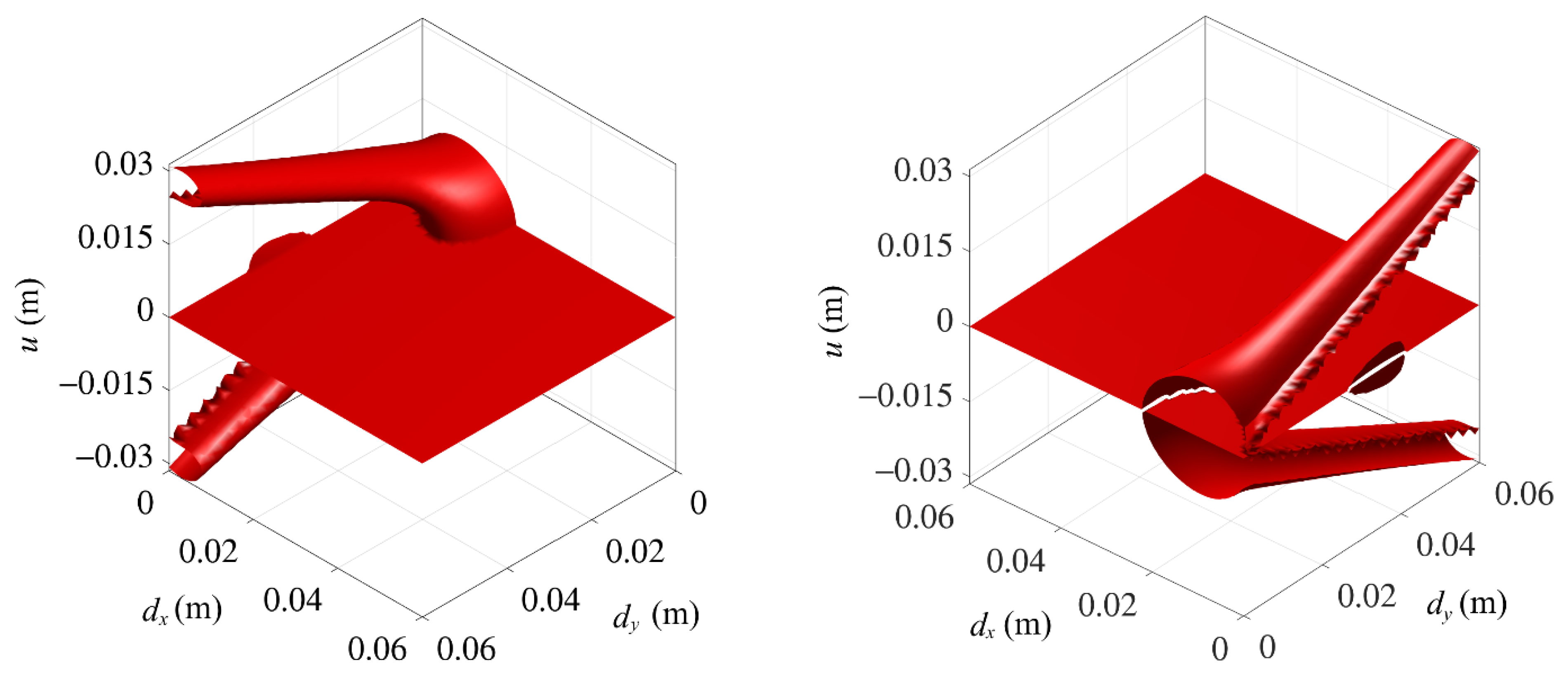
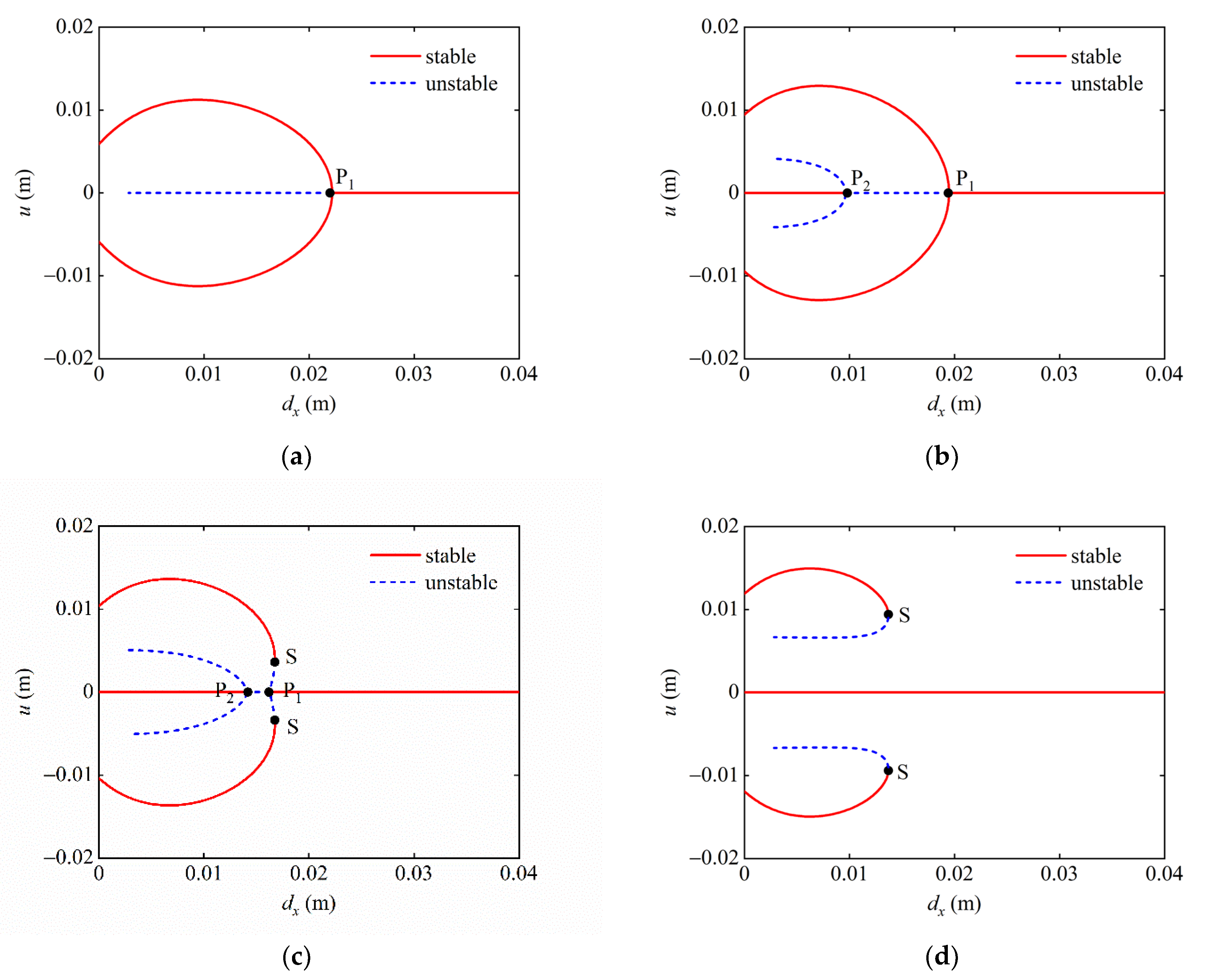
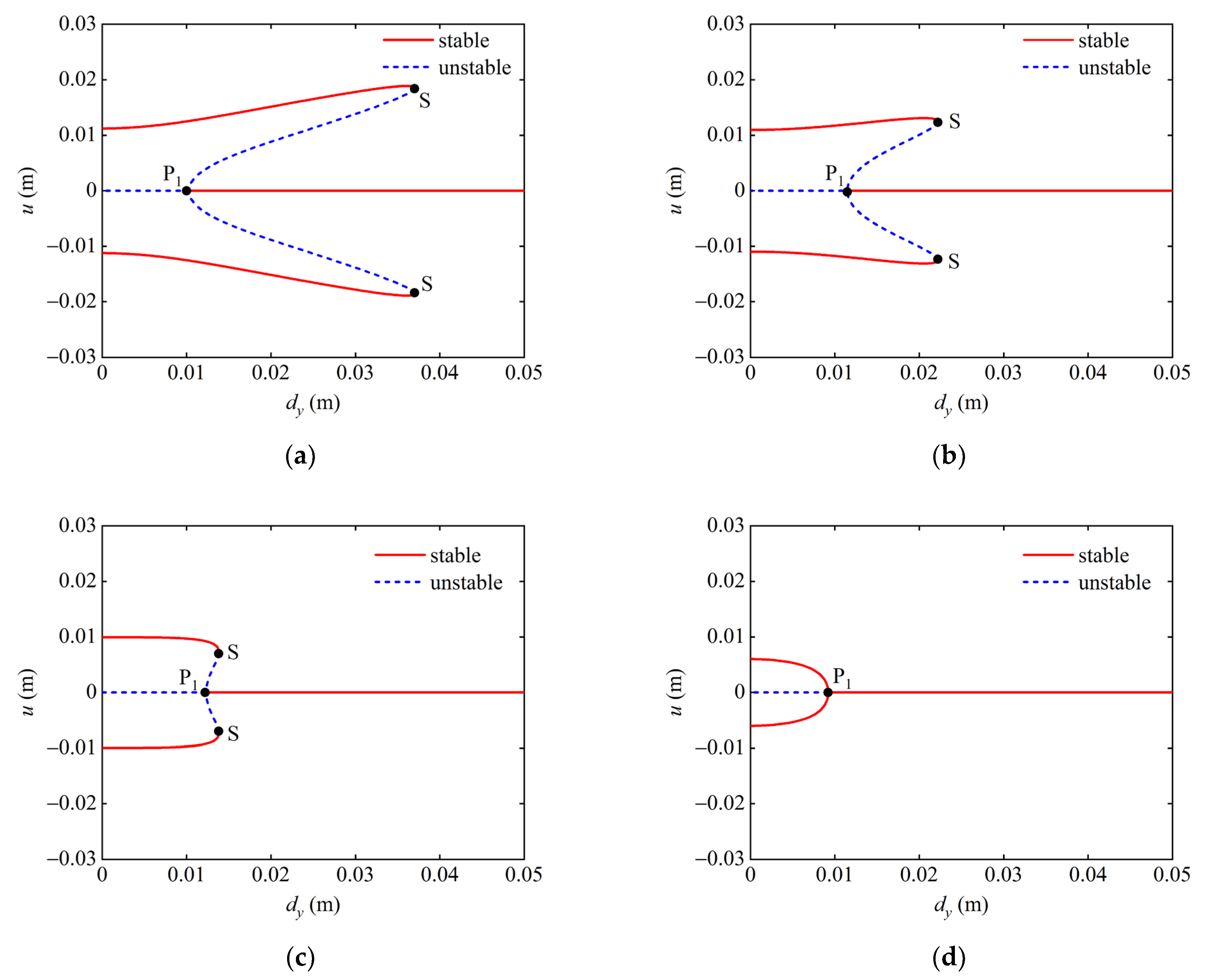
3.1. Analysis of Static Bifurcation Characteristics
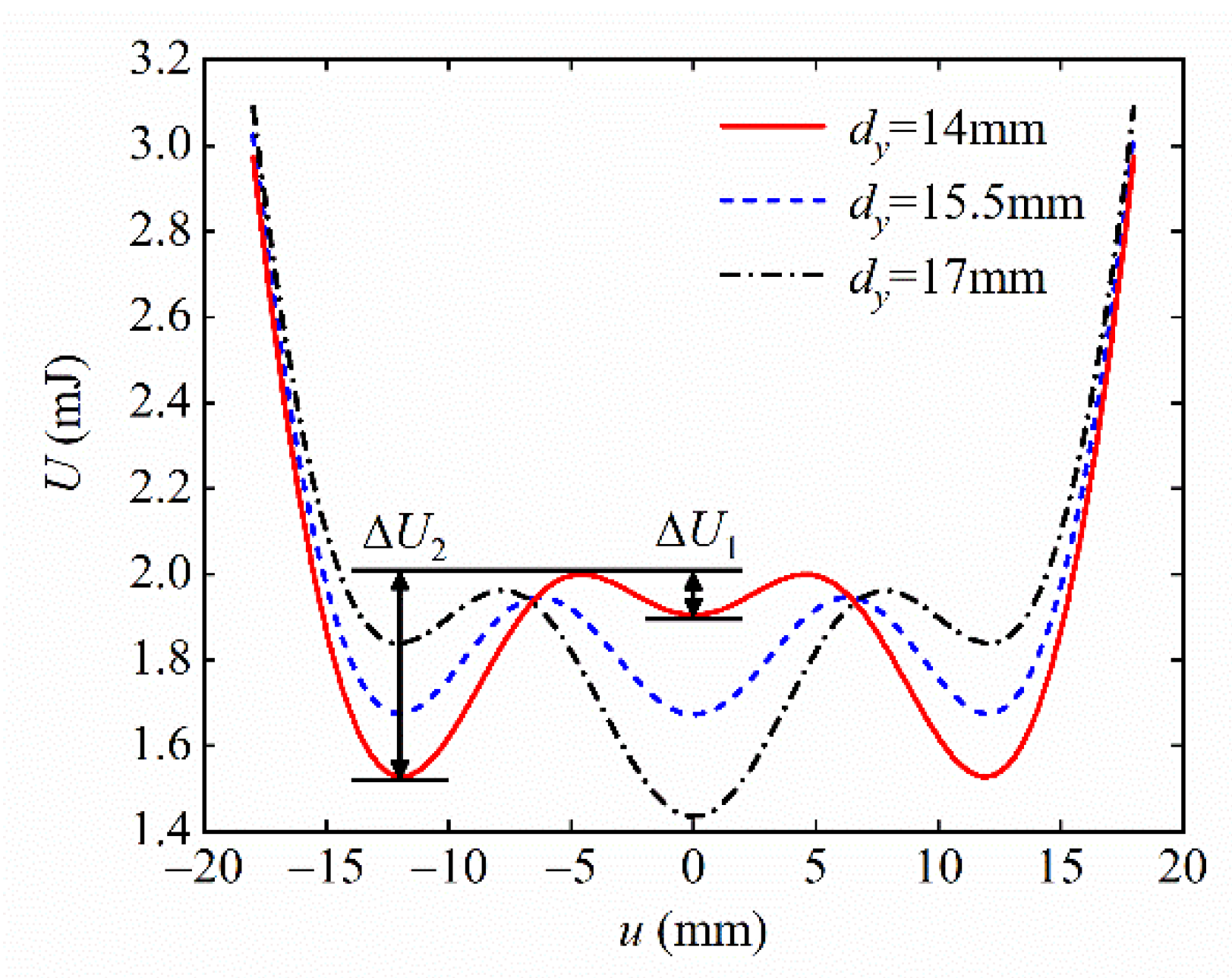
3.2. Analysis of System Potential Energy
3.3. Analysis of System Dynamics Response
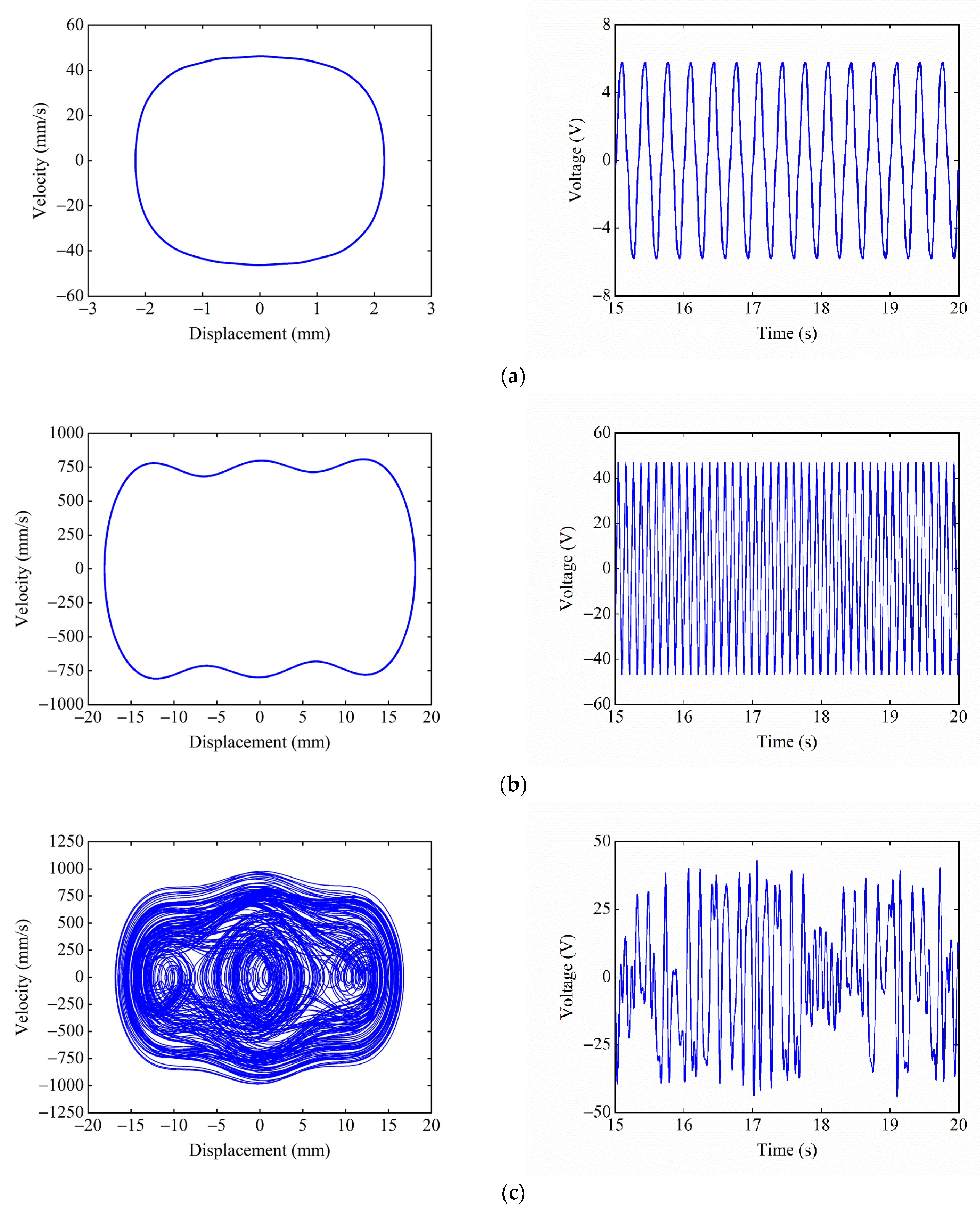
3.3.1. Influence of Starting Position on System Dynamic Response
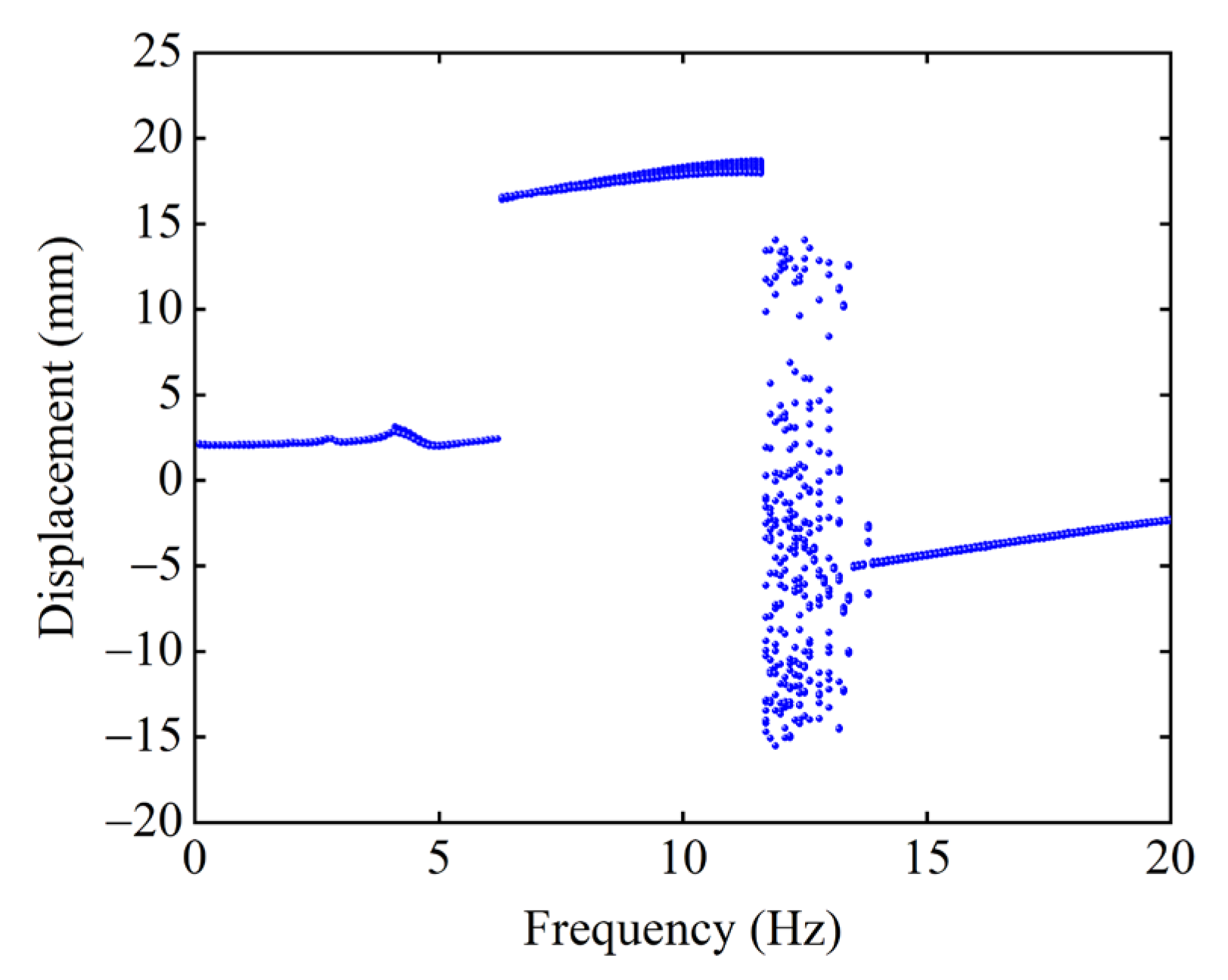
3.3.2. Influence of Excitation Frequency on System Dynamic Response
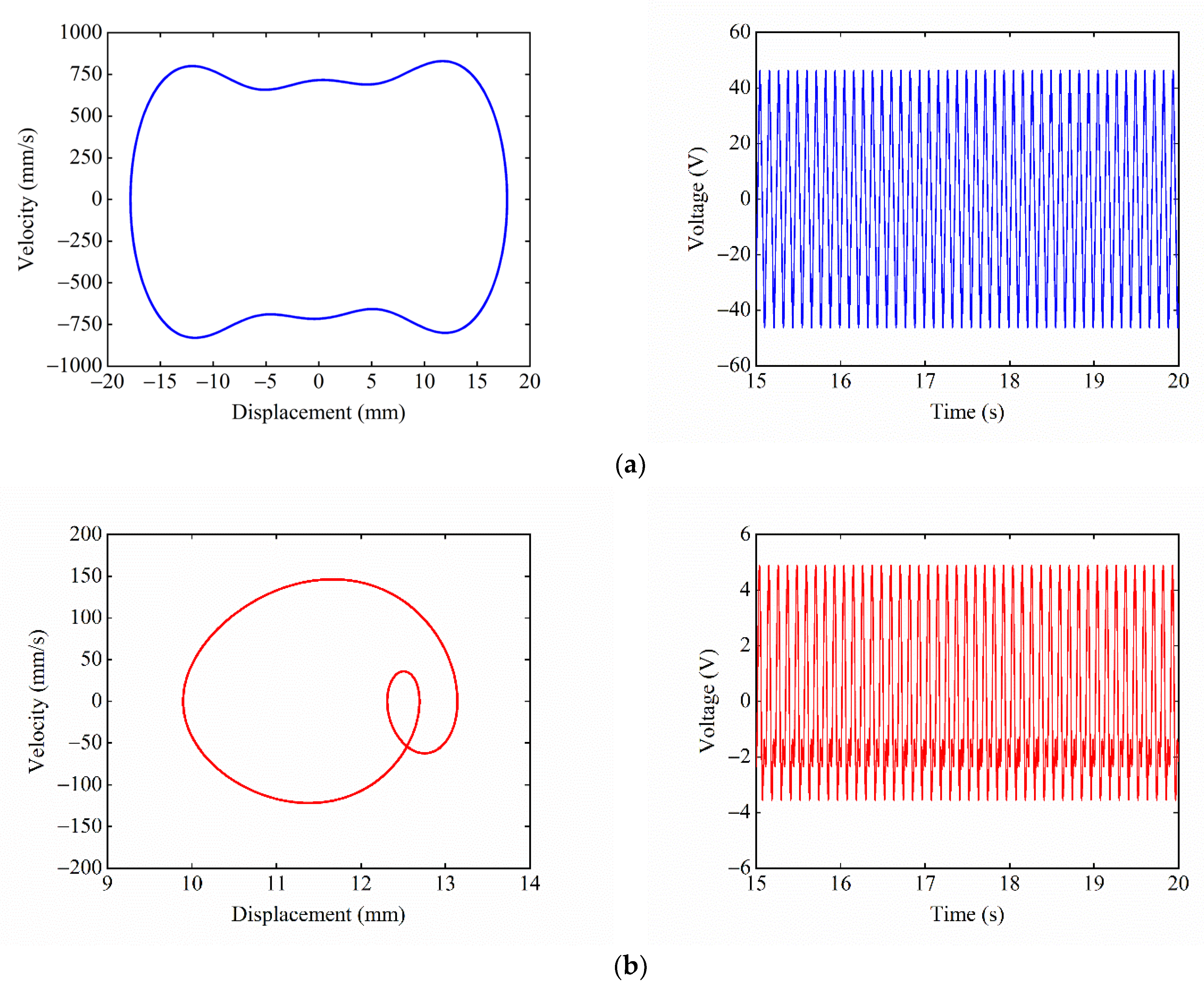
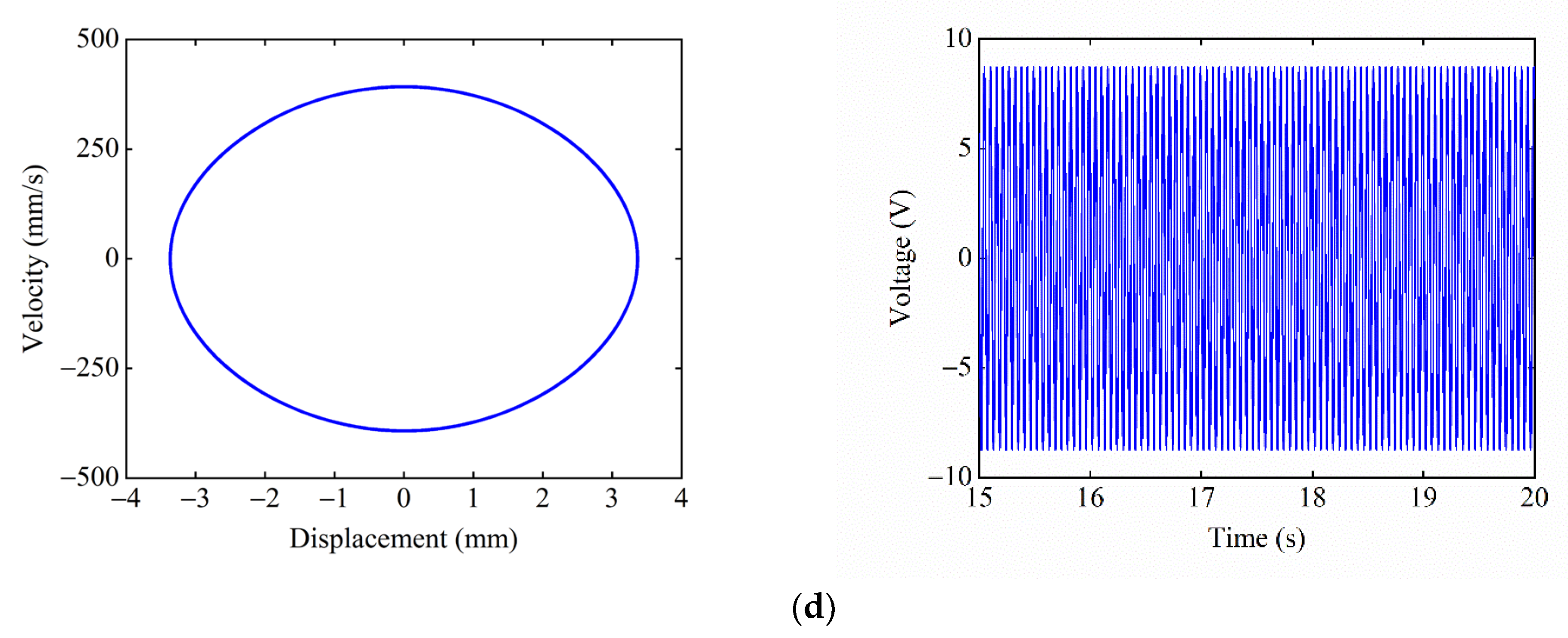
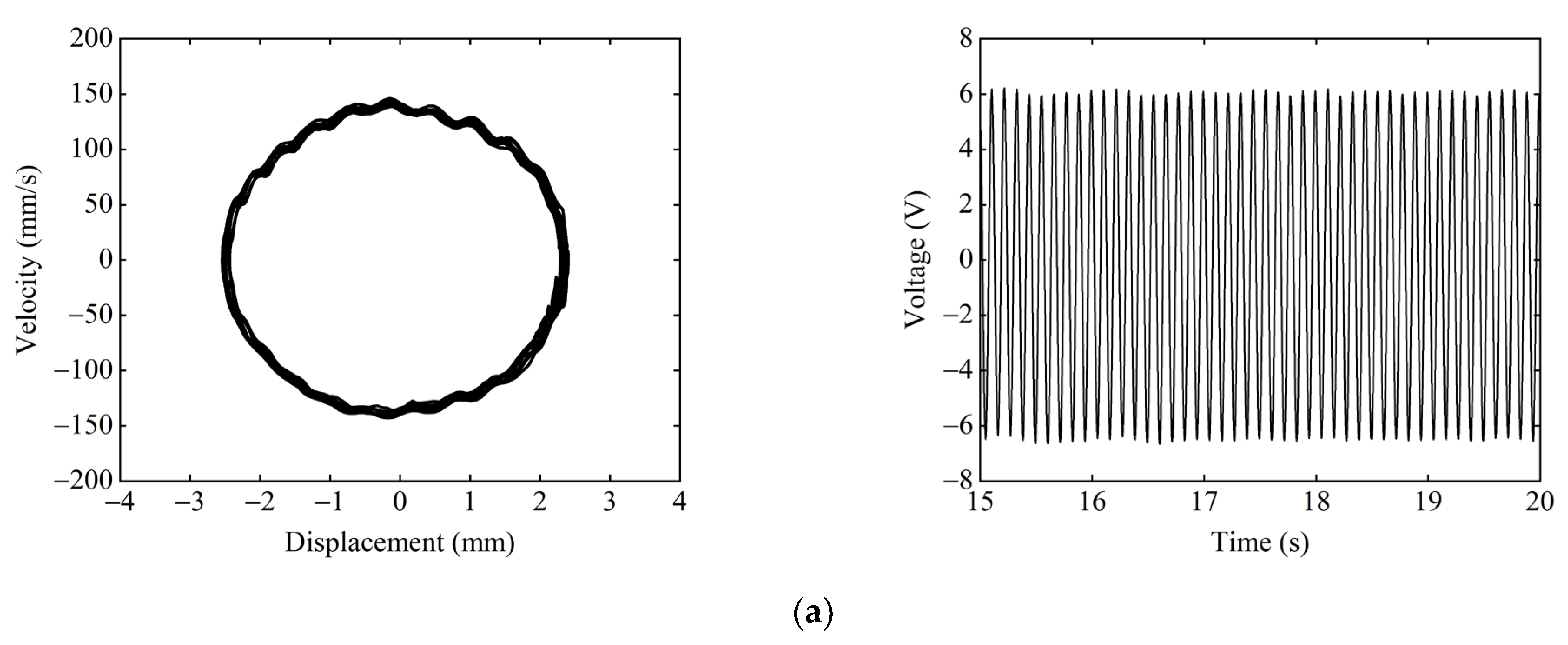
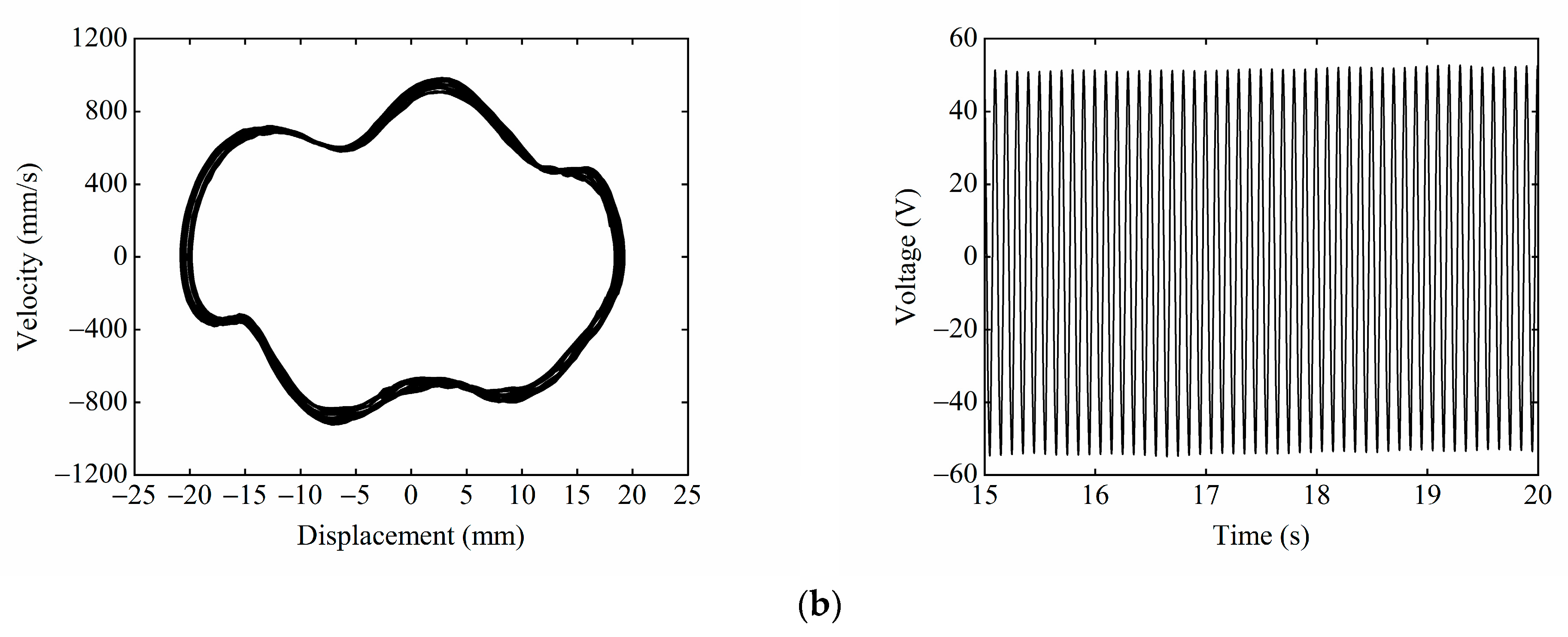
4. Experimental Verification
5. Conclusions
- (1)
- The CTPEH system has the characteristic of a complex static solution bifurcation. Given the magnet distance , there are four transitions in the steady state of the system as the magnet distance decreases. The first transition is a direct jump from mono-stable to bi-stable. The second is to jump from mono-stable to bi-stable and then to tri-stable. The third is to start from a mono-stable, first to a tri-stable, then jump to a bi-stable, and finally to a tri-stable. The fourth is a direct transition from mono-stable to tri-stable.
- (2)
- When the system exhibits a tri-stable state, the system has three potential energy wells. In the range of tri-stable, when the magnet distance is certain, adjusting the magnet distance can alter the depth of three potential wells of the system, thereby changing the shape of the potential energy curve of the system.
- (3)
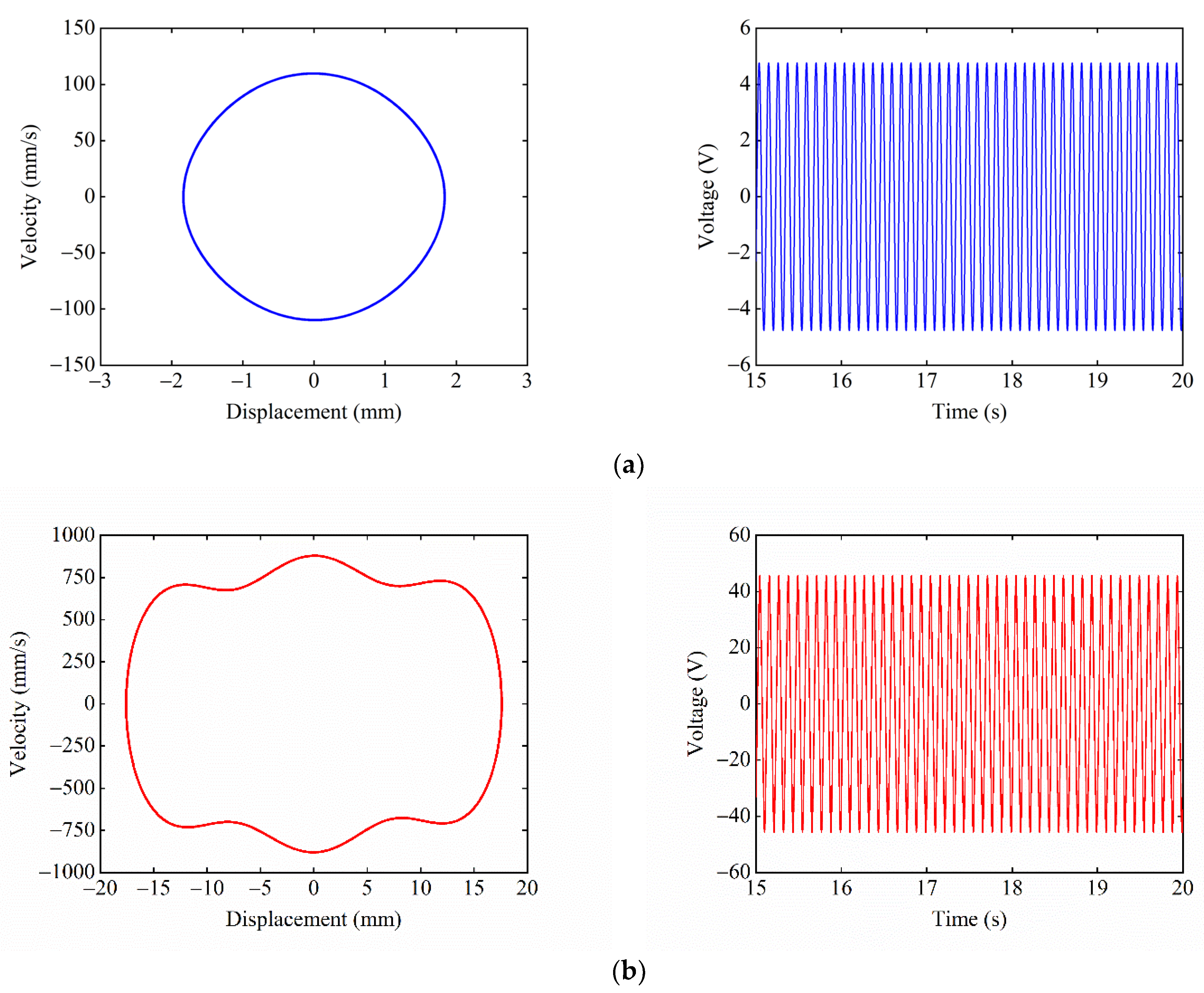
- The different starting positions have a significant influence on the dynamic response of the system. When the starting position is near a shallow potential well, the system can easily overcome the potential barrier to achieve large-amplitude interwell motion, resulting in a large response displacement and output voltage. When the starting position is near a deep potential well, it is difficult for the system to overcome the constraints of the potential barrier. At this time, the system can only perform small-amplitude intrawell motion, which greatly reduces the response displacement and output voltage of the system.
- (4)
- The external excitation frequency has a great effect on the output characteristics of the system. As the excitation frequency increases, the system behaves as small-amplitude intrawell, large-amplitude interwell, chaotic, and small-amplitude intrawell motion states in that order. When the excitation frequency is within the large-amplitude response frequency range of the system, the system exhibits a high-energy output state, which is beneficial to the effective harvesting of energy.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Boubiche, D.E.; Pathan, A.K.; Lloret, J.; Zhou, H.; Hong, S.; Amin, S.O.; Feki, M.A. Advanced Industrial Wireless Sensor Networks and Intelligent IoT. IEEE Commun. Mag. 2018, 56, 14–15. [Google Scholar] [CrossRef]
- Kong, F.; Zhou, Y.; Chen, G. Multimedia data fusion method based on wireless sensor network in intelligent transportation system. Multimed. Tools Appl. 2020, 79, 35195–35207. [Google Scholar] [CrossRef]
- Ahmad, I.; Shah, K.; Ullah, S. Military Applications using Wireless Sensor Networks: A survey. Int. J. Eng. Sci. 2016, 6, 7039. [Google Scholar]
- Carneiro, P.; Soares Dos Santos, M.P.; Rodrigues, A.; Ferreira, J.A.F.; Simões, J.A.O.; Marques, A.T.; Kholkin, A.L. Electromagnetic energy harvesting using magnetic levitation architectures: A review. Appl. Energy 2020, 260, 114191. [Google Scholar] [CrossRef]
- Guo, X.; Zhang, Y.; Fan, K.; Lee, C.; Wang, F. A comprehensive study of non-linear air damping and “pull-in” effects on the electrostatic energy harvesters. Energy Convers. Manag. 2020, 203, 112264. [Google Scholar] [CrossRef]
- He, W.; Zhang, J.; Yuan, S.; Yang, A.; Qu, C. A Three-Dimensional Magneto-Electric Vibration Energy Harvester Based on Magnetic Levitation. IEEE Magn. Lett. 2017, 8, 6104703. [Google Scholar] [CrossRef]
- Chandwani, J.; Somkuwar, R.; Deshmukh, R. Multi-band piezoelectric vibration energy harvester for low-frequency applications. Microsyst. Technol. 2019, 25, 3867–3877. [Google Scholar] [CrossRef]
- Wei, C.; Jing, X. A comprehensive review on vibration energy harvesting: Modelling and realization. Renew. Sustain. Energy Rev. 2017, 74, 1–18. [Google Scholar] [CrossRef]
- Saxena, S.; Sharma, R.; Pant, B.D. Design and development of guided four beam cantilever type MEMS based piezoelectric energy harvester. Microsyst. Technol. 2017, 23, 1751–1759. [Google Scholar] [CrossRef]
- Hosseini, R.; Hamedi, M. An investigation into resonant frequency of trapezoidal V-shaped cantilever piezoelectric energy harvester. Microsyst. Technol. 2016, 22, 1127–1134. [Google Scholar] [CrossRef]
- Ghayesh, M.H.; Farokhi, H. Nonlinear broadband performance of energy harvesters. Int. J. Eng. Sci. 2020, 147, 103202. [Google Scholar] [CrossRef]
- Tran, N.; Ghayesh, M.H.; Arjomandi, M. Ambient vibration energy harvesters: A review on nonlinear techniques for performance enhancement. Int. J. Eng. Sci. 2018, 127, 162–185. [Google Scholar] [CrossRef]
- Yildirim, T.; Zhang, J.; Sun, S.; Alici, G.; Zhang, S.; Li, W. Design of an enhanced wideband energy harvester using a parametrically excited array. J. Sound Vib. 2017, 410, 416–428. [Google Scholar] [CrossRef]
- He, Q.; Jiang, T. Complementary multi-mode low-frequency vibration energy harvesting with chiral piezoelectric structure. Appl. Phys. Lett. 2017, 110, 213901. [Google Scholar] [CrossRef]
- Xie, Z.; Wang, T.; Kwuimy, C.A.K.; Shao, Y.; Huang, W. Design, analysis and experimental study of a T-shaped piezoelectric energy harvester with internal resonance. Smart Mater. Struct. 2019, 28, 085027. [Google Scholar] [CrossRef]
- Zhao, D.; Wang, X.; Cheng, Y.; Liu, S.; Wu, Y.; Chai, L.; Liu, Y.; Cheng, Q. Analysis of single-degree-of-freedom piezoelectric energy harvester with stopper by incremental harmonic balance method. Mater. Res. Express 2018, 5, 055502. [Google Scholar] [CrossRef]
- Rezaei, M.; Khadem, S.E.; Firoozy, P. Broadband and tunable PZT energy harvesting utilizing local nonlinearity and tip mass effects. Int. J. Eng. Sci. 2017, 118, 1–15. [Google Scholar] [CrossRef]
- Huang, D.; Zhou, S.; Litak, G. Theoretical analysis of multi-stable energy harvesters with high-order stiffness terms. Commun. Nonlinear Sci. 2019, 69, 270–286. [Google Scholar] [CrossRef]
- Halim, M.A.; Kim, D.H.; Park, J.Y. Low Frequency Vibration Energy Harvester Using Stopper-Engaged Dynamic Magnifier for Increased Power and Wide Bandwidth. J. Electr. Eng. Technol. 2016, 11, 707–714. [Google Scholar] [CrossRef]
- Aladwani, A.; Aldraihem, O.; Baz, A. A Distributed Parameter Cantilevered Piezoelectric Energy Harvester with a Dynamic Magnifier. Mech. Adv. Mater. Struc. 2014, 21, 566–578. [Google Scholar] [CrossRef]
- Guo, K.; Cao, S.; Wang, S. Numerical and Experimental Studies on Nonlinear Dynamics and Performance of a Bistable Piezoelectric Cantilever Generator. Shock Vib. 2015, 2015, 692731. [Google Scholar] [CrossRef] [Green Version]
- Zhu, P.; Ren, X.; Qin, W.; Yang, Y.; Zhou, Z. Theoretical and experimental studies on the characteristics of a tri-stable piezoelectric harvester. Arch. Appl. Mech. 2017, 87, 1541–1554. [Google Scholar] [CrossRef]
- Shah, V.; Kumar, R.; Talha, M.; Twiefel, J. Numerical and experimental study of bistable piezoelectric energy harvester. Integr. Ferroelectr. 2018, 192, 38–56. [Google Scholar] [CrossRef]
- Haitao, L.; Weiyang, Q.; Chunbo, L.; Wangzheng, D.; Zhiyong, Z. Dynamics and coherence resonance of tri-stable energy harvesting system. Smart Mater. Struct. 2015, 25, 15001–15012. [Google Scholar] [CrossRef]
- Ma, X.; Li, H.; Zhou, S.; Yang, Z.; Litak, G. Characterizing nonlinear characteristics of asymmetric tristable energy harvesters. Mech. Syst. Signal Pr. 2022, 168, 108612. [Google Scholar] [CrossRef]
- Zhou, S.; Cao, J.; Erturk, A.; Lin, J. Enhanced broadband piezoelectric energy harvesting using rotatable magnets. Appl. Phys. Lett. 2013, 102, 173901. [Google Scholar] [CrossRef]
- Ju, Y.; Li, Y.; Tan, J.; Zhao, Z.; Wang, G. Transition mechanism and dynamic behaviors of a multi-stable piezoelectric energy harvester with magnetic interaction. J. Sound Vib. 2021, 501, 116074. [Google Scholar] [CrossRef]
- Zhou, S.; Cao, J.; Lin, J.; Wang, Z. Exploitation of a tristable nonlinear oscillator for improving broadband vibration energy harvesting. Eur. Phys. J. Appl. Phys. 2014, 67, 30902. [Google Scholar] [CrossRef]
- Wang, W.; Cao, J.; Bowen, C.R.; Litak, G. Multiple solutions of asymmetric potential bistable energy harvesters: Numerical simulation and experimental validation. Eur. Phys. J. B 2018, 91, 254. [Google Scholar] [CrossRef]
- Zhou, W.; Wang, B.; Lim, C.W.; Yang, Z. A distributed-parameter electromechanical coupling model for a segmented arc-shaped piezoelectric energy harvester. Mech. Syst. Signal Pract. 2021, 146, 107005. [Google Scholar] [CrossRef]
- Pourashraf, T.; Bonello, P.; Truong, J. Analytical and Experimental Investigation of a Curved Piezoelectric Energy Harvester. Sensors 2022, 22, 2207. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Zhang, X.; Wang, L.; Chen, L. An arch-linear composed beam piezoelectric energy harvester with magnetic coupling: Design, modeling and dynamic analysis. J. Sound Vib. 2021, 513, 116394. [Google Scholar] [CrossRef]
- Jung, W.; Lee, M.; Kang, M.; Moon, H.G.; Yoon, S.; Baek, S.; Kang, C. Powerful curved piezoelectric generator for wearable applications. Nano Energy 2015, 13, 174–181. [Google Scholar] [CrossRef]
- Zhao, J.; Yang, J.; Lin, Z.; Zhao, N.; Liu, J.; Wen, Y.; Li, P. An arc-shaped piezoelectric generator for multi-directional wind energy harvesting. Sens. Actuat. A-Phys. 2015, 236, 173–179. [Google Scholar] [CrossRef]
- Kim, P.; Seok, J. Dynamic and energetic characteristics of a tri-stable magnetopiezoelastic energy harvester. Mech. Mach. Theory 2015, 94, 41–63. [Google Scholar] [CrossRef]
- Erturk, A.; Inman, D.J. Piezoelectric Energy Harvesting; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | |
|---|---|---|
| Length | 40 mm | |
| Width | 8 mm | |
| Substrate layer | Height | 0.2 mm |
| Material density | 8500 kg/m3 | |
| Elastic modulus | 128 × 109 Pa | |
| Length | 40 mm | |
| Width | 8 mm | |
| Piezoelectric layer | Height | 0.11 mm |
| Material density | 1750 kg/m3 | |
| Elastic modulus | 3 × 109 Pa | |
| Length | 5 mm | |
| Width | 10 mm | |
| Magnet | Height | 10 mm |
| Material density | 7500 kg/m3 | |
| Magnetization | 5.5 × 105 A/m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Xu, H.; Chen, X.; Zhu, F.; Guo, Y.; Tian, H. Vibration Characteristics and Experimental Research of Combined Beam Tri-Stable Piezoelectric Energy Harvester. Micromachines 2022, 13, 1465. https://doi.org/10.3390/mi13091465
Zhang X, Xu H, Chen X, Zhu F, Guo Y, Tian H. Vibration Characteristics and Experimental Research of Combined Beam Tri-Stable Piezoelectric Energy Harvester. Micromachines. 2022; 13(9):1465. https://doi.org/10.3390/mi13091465
Chicago/Turabian StyleZhang, Xuhui, Hengtao Xu, Xiaoyu Chen, Fulin Zhu, Yan Guo, and Hao Tian. 2022. "Vibration Characteristics and Experimental Research of Combined Beam Tri-Stable Piezoelectric Energy Harvester" Micromachines 13, no. 9: 1465. https://doi.org/10.3390/mi13091465