
Lab-on-a-Chip Technologies for Microgravity Simulation and Space Applications




Abstract
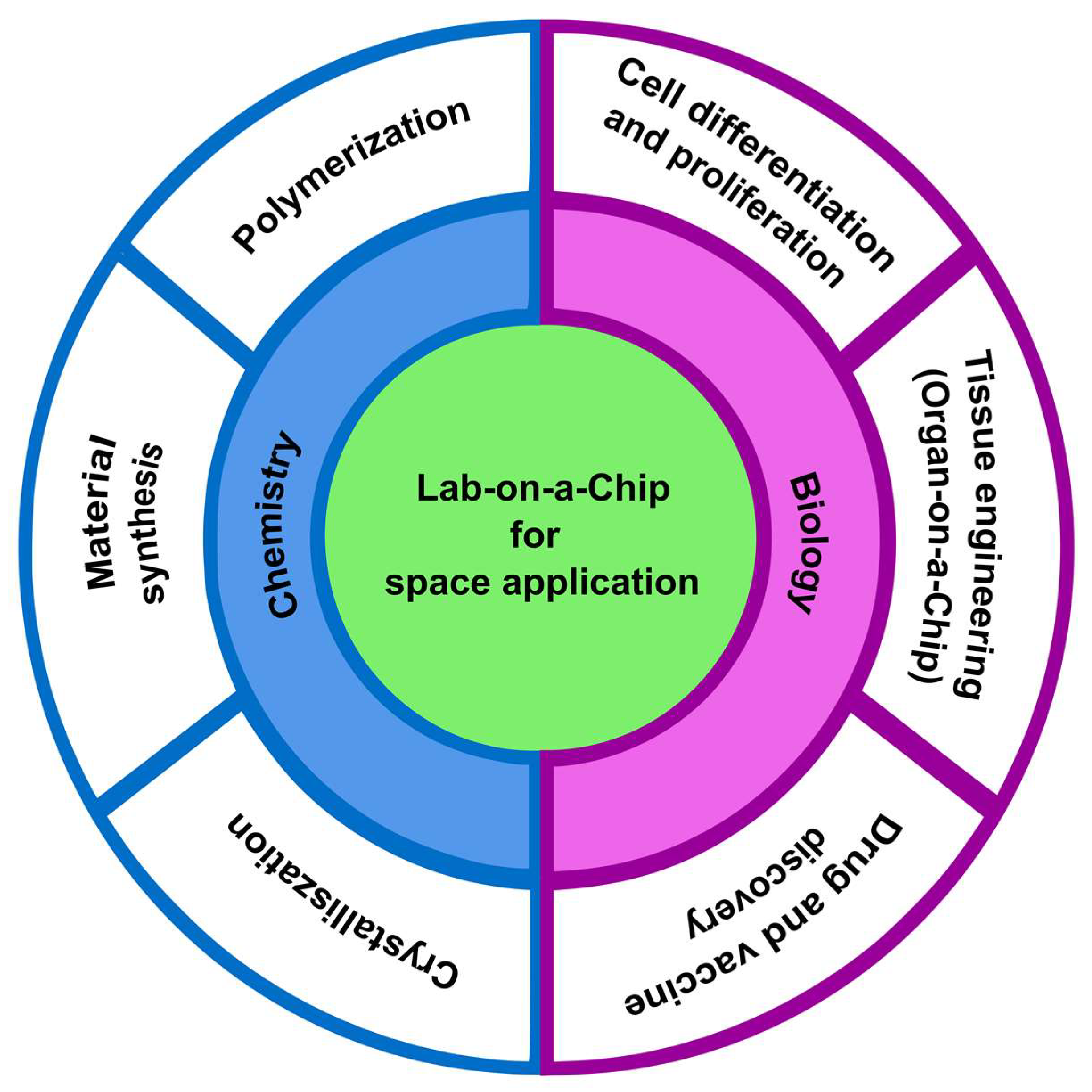
:1. Introduction
2. Lab-on-a-Chip Technologies in Conventional Simulated Microgravity Environment
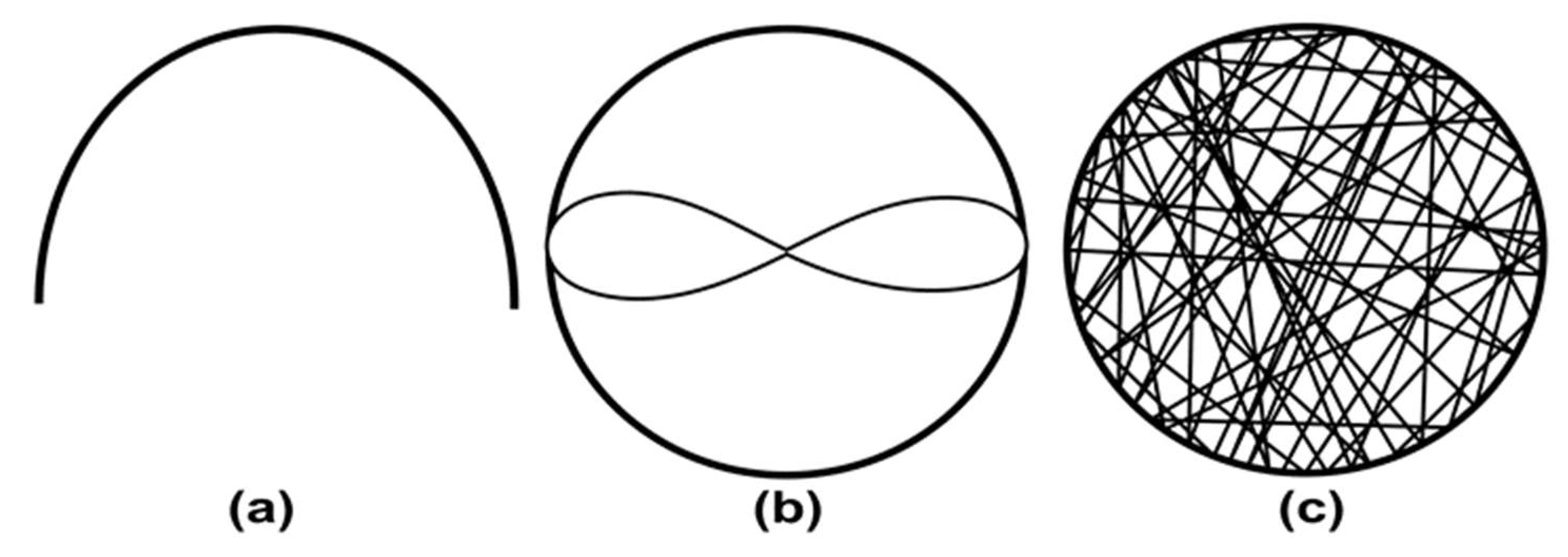
2.1. Clinostat
2.2. Rotating Wall Vessels
2.3. Random Positioning Machine
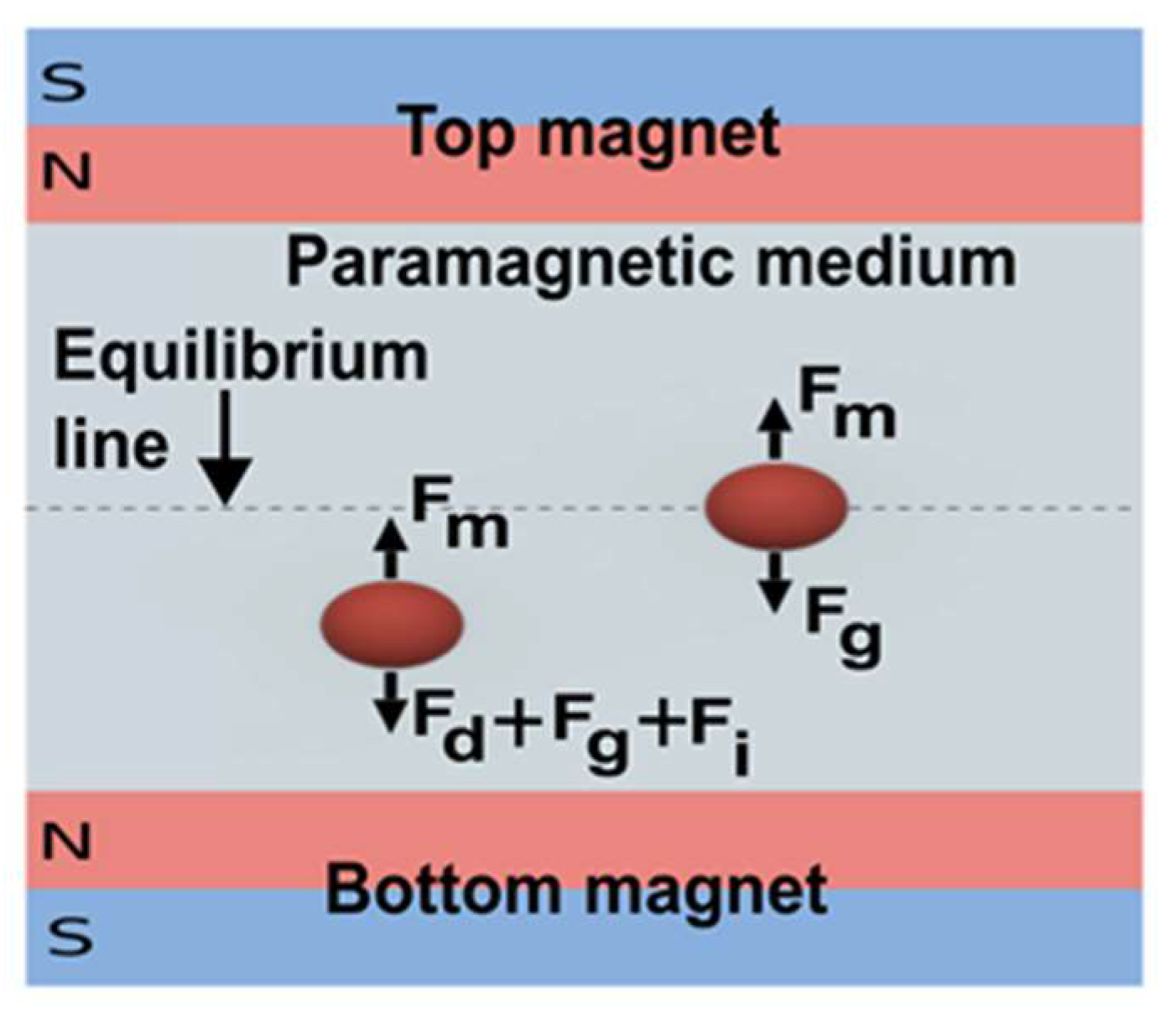
2.4. Diamagnetic Levitation
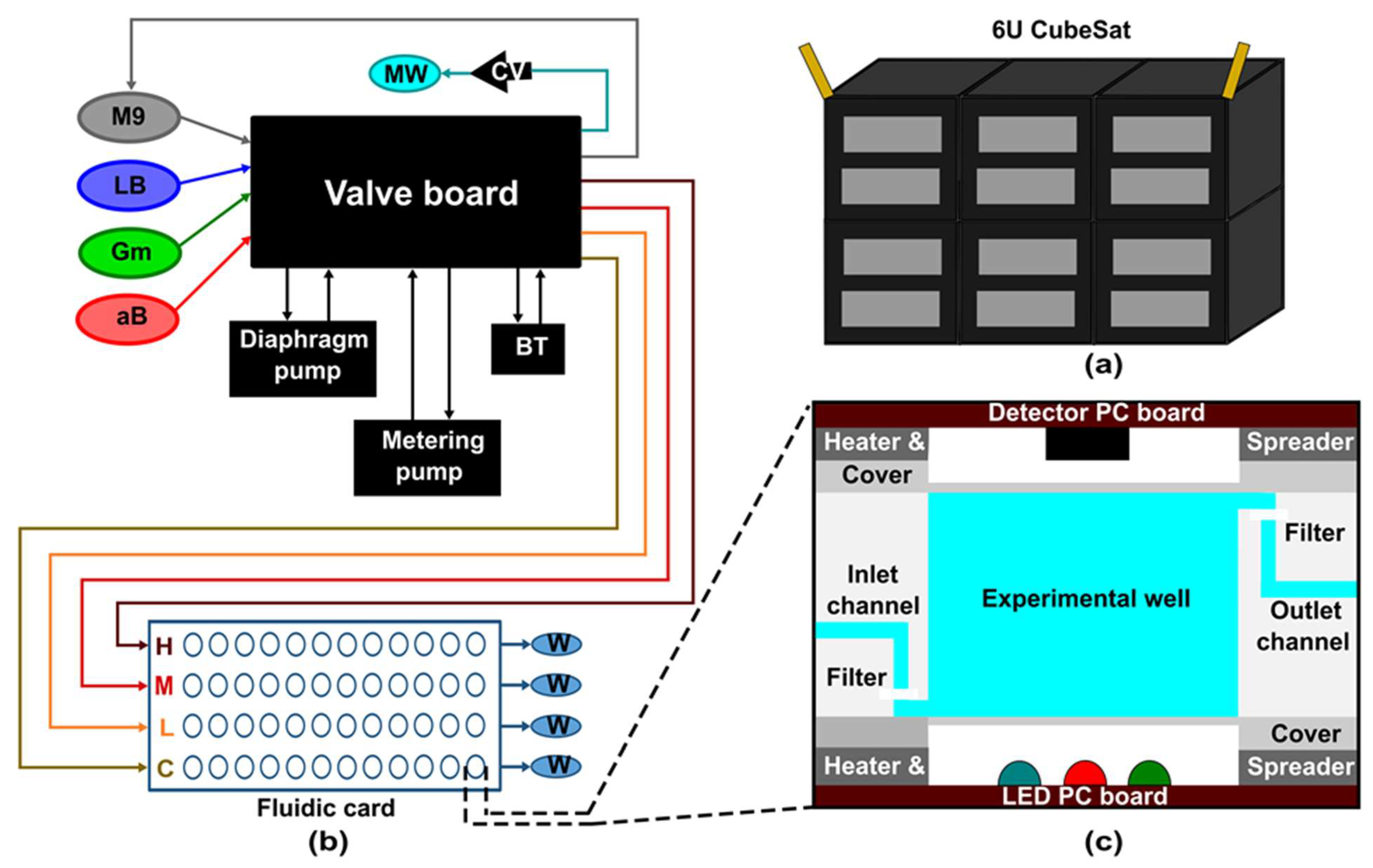
3. CubeSat
4. Plausible Laboratory-Based Microgravity Simulators

5. Summary and Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Terry, S.C.; Jerman, J.H.; Angell, J.B. A gas chromatographic air analyzer fabricated on a silicon wafer. IEEE Trans. Electron Devices 1979, 26, 1880–1886. [Google Scholar] [CrossRef]
- Manz, A.; Graber, N.; Widmer, H. Miniaturized total chemical analysis systems: A novel concept for chemical sensing. Sens. Actuators B Chem. 1990, 1, 244–248. [Google Scholar] [CrossRef]
- Fung, W.-T.; Beyzavi, A.; Abgrall, P.; Nguyen, N.-T.; Li, H.-Y. Microfluidic platform for controlling the differentiation of embryoid bodies. Lab A Chip 2009, 9, 2591–2595. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Luka, G.; Ahmadi, A.; Najjaran, H.; Alocilja, E.; DeRosa, M.; Wolthers, K.; Malki, A.; Aziz, H.; Althani, A.; Hoorfar, M. Microfluidics Integrated Biosensors: A Leading Technology towards Lab-on-a-Chip and Sensing Applications. Sensors 2015, 15, 30011–30031. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mirasoli, M.; Guardigli, M.; Michelini, E.; Roda, A. Recent advancements in chemical luminescence-based lab-on-chip and microfluidic platforms for bioanalysis. J. Pharm. Biomed. Anal. 2014, 87, 36–52. [Google Scholar] [CrossRef]
- Khalid, N.; Kobayashi, I.; Nakajima, M. Recent lab-on-chip developments for novel drug discovery. Wiley Interdiscip. Rev. Syst. Biol. Med. 2017, 9, e1381. [Google Scholar] [CrossRef]
- Mei, L.; Jin, M.; Xie, S.; Yan, Z.; Wang, X.; Zhou, G.; Berg, A.V.D.; Shui, L. A simple capillary-based open microfluidic device for size on-demand high-throughput droplet/bubble/microcapsule generation. Lab A Chip 2018, 18, 2806–2815. [Google Scholar] [CrossRef]
- Jebrail, M.J.; Bartsch, M.S.; Patel, K.D. Digital microfluidics: A versatile tool for applications in chemistry, biology and medicine. Lab A Chip 2012, 12, 2452–2463. [Google Scholar] [CrossRef]
- Pollack, M.G.; Fair, R.B.; Shenderov, A.D. Electrowetting-based actuation of liquid droplets for microfluidic applications. Appl. Phys. Lett. 2000, 77, 1725–1726. [Google Scholar] [CrossRef] [Green Version]
- Yap, Y.F.; Tan, S.H.; Nguyen, N.-T.; Murshed, S.M.S.; Wong, T.N.; Yobas, L. Thermally mediated control of liquid microdroplets at a bifurcation. J. Phys. D Appl. Phys. 2009, 42, 065503. [Google Scholar] [CrossRef]
- Tan, S.-H.; Murshed, S.M.S.; Nguyen, N.-T.; Wong, T.N.; Yobas, L. Thermally controlled droplet formation in flow focusing geometry: Formation regimes and effect of nanoparticle suspension. J. Phys. D Appl. Phys. 2008, 41, 165501. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Chen, L.; Sun, L. Digital microfluidics: A promising technique for biochemical applications. Front. Mech. Eng. 2017, 12, 510–525. [Google Scholar] [CrossRef]
- Bhattacharjee, N.; Urrios, A.; Kang, S.; Folch, A. The upcoming 3D-printing revolution in microfluidics. Lab A Chip 2016, 16, 1720–1742. [Google Scholar] [CrossRef] [Green Version]
- Ho, C.M.B.; Ng, S.H.; Li, K.H.H.; Yoon, Y.-J. 3D printed microfluidics for biological applications. Lab A Chip 2015, 15, 3627–3637. [Google Scholar] [CrossRef]
- Prasad, B.; Richter, P.; Vadakedath, N.; Haag, F.W.M.; Strauch, S.M.; Mancinelli, R.; Schwarzwälder, A.; Etcheparre, E.; Gaume, N.; Lebert, M. How the space environment influences organisms: An astrobiological perspective and review. Int. J. Astrobiol. 2021, 20, 159–177. [Google Scholar] [CrossRef]
- Phan, D.-T.; Shaegh, S.A.M.; Yang, C.; Nguyen, N.-T. Sample concentration in a microfluidic paper-based analytical device using ion concentration polarization. Sens. Actuators B Chem. 2015, 222, 735–740. [Google Scholar] [CrossRef] [Green Version]
- Herranz, R.; Anken, R.; Boonstra, J.; Braun, M.; Christianen, P.C.M.; De Geest, M.; Hauslage, J.; Hilbig, R.; Hill, R.J.A.; Lebert, M.; et al. Ground-Based Facilities for Simulation of Microgravity: Organism-Specific Recommendations for Their Use, and Recommended Terminology. Astrobiology 2013, 13, 1–17. [Google Scholar] [CrossRef] [Green Version]
- Amselem, S. Remote Controlled Autonomous Microgravity Lab Platforms for Drug Research in Space. Pharm. Res. 2019, 36, 1–15. [Google Scholar] [CrossRef]
- Sipos, G.; Bihari, T.; Milánkovich, D.; Darvas, F. Flow chemistry in space–a unique opportunity to perform extraterrestrial research. J. Flow Chem. 2017, 7, 151–156. [Google Scholar] [CrossRef]
- Ferranti, F.; Del Bianco, M.; Pacelli, C. Advantages and Limitations of Current Microgravity Platforms for Space Biology Research. Appl. Sci. 2020, 11, 68. [Google Scholar] [CrossRef]
- Selig, H.; Dittus, H.; Lämmerzahl, C. Drop Tower Microgravity Improvement towards the Nano-g Level for the Microscope Payload Tests. Microgravity Sci. Technol. 2010, 22, 539–549. [Google Scholar] [CrossRef]
- Van Zoest, T.; Gaaloul, N.; Singh, Y.; Ahlers, H.; Herr, W.; Seidel, S.T.; Ertmer, W.; Rasel, E.; Eckart, M.; Kajari, E.; et al. Bose-Einstein Condensation in Microgravity. Science 2010, 328, 1540–1543. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Krause, M.; Blum, J. Growth and Form of Planetary Seedlings: Results from a Sounding Rocket Microgravity Aggregation Experiment. Phys. Rev. Lett. 2004, 93, 021103. [Google Scholar] [CrossRef] [PubMed]
- Ishizuka, S.; Kimura, Y.; Sakon, I.; Kimura, H.; Yamazaki, T.; Takeuchi, S.; Inatomi, Y. Sounding-rocket microgravity experiments on alumina dust. Nat. Commun. 2018, 9, 1–6. [Google Scholar] [CrossRef] [Green Version]
- McMackin, P.M.; Adam, J.A.; Griffin, S.R.; Bonocora, R.P.; Brakke, K.A.; Lopez, J.M.; Hirsa, A.H. Effects of Microorganisms on Drop Formation in Microgravity during a Parabolic Flight with Residual Gravity and Jitter. Microgravity Sci. Technol. 2022, 34, 1–9. [Google Scholar] [CrossRef]
- Carr, C.E.; Bryan, N.C.; Saboda, K.N.; Bhattaru, S.A.; Ruvkun, G.; Zuber, M.T. Nanopore sequencing at Mars, Europa, and microgravity conditions. npj Microgravity 2020, 6, 24. [Google Scholar] [CrossRef]
- Levchenko, I.; Keidar, M.; Cantrell, J.; Wu, Y.-L.; Kuninaka, H.; Bazaka, K.; Xu, S. Explore space using swarms of tiny satellites. Nature 2018, 562, 185–187. [Google Scholar] [CrossRef] [Green Version]
- Dedolph, R.R.; Dipert, M.H. The Physical Basis of Gravity Stimulus Nullification by Clinostat Rotation. Plant Physiol. 1971, 47, 756–764. [Google Scholar] [CrossRef]
- Häder, D.-P.; Hemmersbach, R.; Lebert, M. Gravity and the Behavior of Unicellular Organisms; Cambridge University Press: Cambridge, UK, 2005. [Google Scholar]
- Klaus, D.; Todd, P.; Schatz, A. Functional weightlessness during clinorotation of cell suspensions. Adv. Space Res. 1998, 21, 1315–1318. [Google Scholar] [CrossRef]
- Hemmersbach, R.; von der Wiesche, M.; Seibt, D. Ground-based experimental platforms in gravitational biology and human physiology. Signal Transduct. 2006, 6, 381–387. [Google Scholar] [CrossRef]
- Brungs, S.; Kolanus, W.; Hemmersbach, R. Syk phosphorylation—A gravisensitive step in macrophage signalling. Cell Commun. Signal. 2015, 13, 9. [Google Scholar] [CrossRef] [Green Version]
- Tauber, S.; Hauschild, S.; Paulsen, K.; Gutewort, A.; Raig, C.; Hürlimann, E.; Biskup, J.; Philpot, C.; Lier, H.; Engelmann, F.; et al. Signal Transduction in Primary Human T Lymphocytes in Altered Gravity during Parabolic Flight and Clinostat Experiments. Cell. Physiol. Biochem. 2015, 35, 1034–1051. [Google Scholar] [CrossRef]
- Adrian, A.; Schoppmann, K.; Sromicki, J.; Brungs, S.; von der Wiesche, M.; Hock, B.; Kolanus, W.; Hemmersbach, R.; Ullrich, O. The oxidative burst reaction in mammalian cells depends on gravity. Cell Commun. Signal. 2013, 11, 98. [Google Scholar] [CrossRef] [Green Version]
- Shinde, V.; Brungs, S.; Henry, M.; Wegener, L.; Nemade, H.; Rotshteyn, T.; Acharya, A.; Baumstark-Khan, C.; Hellweg, C.E.; Hescheler, J.; et al. Simulated Microgravity Modulates Differentiation Processes of Embryonic Stem Cells. Cell. Physiol. Biochem. 2016, 38, 1483–1499. [Google Scholar] [CrossRef] [Green Version]
- Kamal, K.Y.; Hemmersbach, R.; Medina, F.J.; Herranz, R. Proper selection of 1 g controls in simulated microgravity research as illustrated with clinorotated plant cell suspension cultures. Life Sci. Space Res. 2015, 5, 47–52. [Google Scholar] [CrossRef]
- Eiermann, P.; Kopp, S.; Hauslage, J.; Hemmersbach, R.; Gerzer, R.; Ivanova, K. Adaptation of a 2-D Clinostat for Simulated Microgravity Experiments with Adherent Cells. Microgravity Sci. Technol. 2013, 25, 153–159. [Google Scholar] [CrossRef]
- Svejgaard, B.; Wehland, M.; Ma, X.; Kopp, S.; Sahana, J.; Warnke, E.; Aleshcheva, G.; Hemmersbach, R.; Hauslage, J.; Grosse, J.; et al. Common Effects on Cancer Cells Exerted by a Random Positioning Machine and a 2D Clinostat. PLoS ONE 2015, 10, e0135157. [Google Scholar] [CrossRef] [Green Version]
- Krüger, M.; Melnik, D.; Kopp, S.; Buken, C.; Sahana, J.; Bauer, J.; Wehland, M.; Hemmersbach, R.; Corydon, T.J.; Infanger, M.; et al. Fighting Thyroid Cancer with Microgravity Research. Int. J. Mol. Sci. 2019, 20, 2553. [Google Scholar] [CrossRef] [Green Version]
- Warnke, E.; Kopp, S.; Wehland, M.; Hemmersbach, R.; Bauer, J.; Pietsch, J.; Infanger, M.; Grimm, D. Thyroid Cells Exposed to Simulated Microgravity Conditions—Comparison of the Fast Rotating Clinostat and the Random Positioning Machine. Microgravity Sci. Technol. 2015, 28, 247–260. [Google Scholar] [CrossRef]
- Ivanova, K.; Eiermann, P.; Tsiockas, W.; Hemmersbach, R.; Gerzer, R. Differential Regulation of cGMP Signaling in Human Melanoma Cells at Altered Gravity: Simulated Microgravity Down-Regulates Cancer-Related Gene Expression and Motility. Microgravity Sci. Technol. 2018, 30, 457–467. [Google Scholar] [CrossRef]
- Brungs, S.; Egli, M.; Wuest, S.L.; Christianen, P.C.M.; van Loon, J.J.W.A.; Anh, T.J.N.; Hemmersbach, R. Facilities for Simulation of Microgravity in the ESA Ground-Based Facility Programme. Microgravity Sci. Technol. 2016, 28, 191–203. [Google Scholar] [CrossRef]
- Anken, R.H.; Baur, U.; Hilbig, R. Clinorotation Increases the Growth of Utricular Otoliths of Developing Cichlid Fish. Microgravity Sci. Technol. 2010, 22, 151–154. [Google Scholar] [CrossRef]
- Unruh, E.; Brungs, S.; Langer, S.; Bornemann, G.; Frett, T.; Hansen, P.-D. Comprehensive Study of the Influence of Altered Gravity on the Oxidative Burst of Mussel (Mytilus edulis) Hemocytes. Microgravity Sci. Technol. 2015, 28, 275–285. [Google Scholar] [CrossRef]
- Anken, R.; Brungs, S.; Grimm, D.; Knie, M.; Hilbig, R. Fish Inner Ear Otolith Growth under Real Microgravity (Spaceflight) and Clinorotation. Microgravity Sci. Technol. 2015, 28, 351–356. [Google Scholar] [CrossRef]
- Anken, R.; Knie, M.; Hilbig, R. Inner Ear Otolith Asymmetry in Late-Larval Cichlid Fish (Oreochromis mossambicus, Perciformes) Showing Kinetotic Behaviour Under Diminished Gravity. Sci. Rep. 2017, 7, 15630. [Google Scholar] [CrossRef] [Green Version]
- Fischer, J.; Schoppmann, K.; Knie, M.; Laforsch, C. Responses of Microcrustaceans to Simulated Microgravity (2D-Clinorotation)—Preliminary Assessments for the Development of Bioregenerative Life Support Systems (BLSS). Microgravity Sci. Technol. 2015, 28, 337–344. [Google Scholar] [CrossRef]
- Horn, A.; Ullrich, O.; Huber, K.; Hemmersbach, R. PMT (Photomultiplier) Clinostat. Microgravity Sci. Technol. 2011, 23, 67–71. [Google Scholar] [CrossRef]
- Brungs, S.; Petrat, G.; von der Wiesche, M.; Anken, R.; Kolanus, W.; Hemmersbach, R. Simulating Parabolic Flight like g-Profiles on Ground—A Combination of Centrifuge and Clinostat. Microgravity Sci. Technol. 2016, 28, 231–235. [Google Scholar] [CrossRef]
- Hemmersbach-Krause, R.U.T.H.; Briegleb, W.; Häder, D.P.; Vogel, K.; Grothe, D.; Meyer, I. Orientation of Paramecium under the Conditions of Weightlessness. J. Eukaryot. Microbiol. 1993, 40, 439–446. [Google Scholar] [CrossRef]
- Yew, A.G.; Atencia, J.; Hsieh, A.H. Lab-on-Chip Clinorotation System for Live-Cell Microscopy under Simulated Microgravity. Cell. Mol. Bioeng. 2014, 7, 165–170. [Google Scholar] [CrossRef]
- Luna, C.; Yew, A.G.; Hsieh, A.H. Effects of angular frequency during clinorotation on mesenchymal stem cell morphology and migration. npj Microgravity 2015, 1, 15007. [Google Scholar] [CrossRef] [Green Version]
- Grimm, D.; Schulz, H.; Krüger, M.; Cortés-Sánchez, J.L.; Egli, M.; Kraus, A.; Sahana, J.; Corydon, T.J.; Hemmersbach, R.; Wise, P.M.; et al. The Fight against Cancer by Microgravity: The Multicellular Spheroid as a Metastasis Model. Int. J. Mol. Sci. 2022, 23, 3073. [Google Scholar] [CrossRef]
- Granet, C.; Laroche, N.; Vico, L.; Alexandre, C.; Lafage-Proust, M.-H. Rotating-wall vessels, promising bioreactors for osteoblastic cell culture: Comparison with other 3D conditions. Med. Biol. Eng. Comput. 1998, 36, 513–519. [Google Scholar] [CrossRef]
- Schwarz, R.P.; Goodwin, T.J.; Wolf, D.A. Cell culture for three-dimensional modeling in rotating-wall vessels: An application of simulated microgravity. J. Tissue Cult. Methods 1992, 14, 51–57. [Google Scholar] [CrossRef]
- Klaus, D.M. Clinostats and bioreactors. Gravit. Space Biol. 2001, 14, 55. [Google Scholar]
- Prewett, T.L.; Goodwin, T.J.; Spaulding, G.F. Three-dimensional modeling of T-24 human bladder carcinoma cell line: A new simulated microgravity culture vessel. J. Tissue Cult. Methods 1993, 15, 29–36. [Google Scholar] [CrossRef]
- Martin, Y.; Vermette, P. Bioreactors for tissue mass culture: Design, characterization, and recent advances. Biomaterials 2005, 26, 7481–7503. [Google Scholar] [CrossRef]
- Begley, C.M.; Kleis, S.J. The fluid dynamic and shear environment in the NASA/JSC rotating-wall perfused-vessel bioreactor. Biotechnol. Bioeng. 2000, 70, 32–40. [Google Scholar] [CrossRef]
- Hammond, T.G.; Hammond, J.M. Optimized suspension culture: The rotating-wall vessel. Am. J. Physiol. Physiol. 2001, 281, F12–F25. [Google Scholar] [CrossRef]
- Ludtka, C.; Silberman, J.; Moore, E.; Allen, J.B. Macrophages in microgravity: The impact of space on immune cells. npj Microgravity 2021, 7, 13. [Google Scholar] [CrossRef]
- Brungs, S.; Hauslage, J.; Hilbig, R.; Hemmersbach, R.; Anken, R. Effects of simulated weightlessness on fish otolith growth: Clinostat versus Rotating-Wall Vessel. Adv. Space Res. 2011, 48, 792–798. [Google Scholar] [CrossRef]
- Acres, J.M.; Youngapelian, M.J.; Nadeau, J. The influence of spaceflight and simulated microgravity on bacterial motility and chemotaxis. npj Microgravity 2021, 7, 7. [Google Scholar] [CrossRef] [PubMed]
- Rosenzweig, J.A.; Abogunde, O.; Thomas, K.; Lawal, A.; Nguyen, Y.-U.; Sodipe, A.; Jejelowo, O. Spaceflight and modeled microgravity effects on microbial growth and virulence. Appl. Microbiol. Biotechnol. 2009, 85, 885–891. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- De, S.; Singh, N. Advancements in Three Dimensional in-Vitro Cell Culture Models. Chem. Rec. 2022, 22, e202200058. [Google Scholar] [CrossRef] [PubMed]
- Phelan, M.A.; Lelkes, P.I.; Swaroop, A. Mini and customized low-cost bioreactors for optimized high-throughput generation of tissue organoids. Stem Cell Investig. 2018, 5, 33. [Google Scholar] [CrossRef]
- Hammond, T.; Allen, P.; Birdsall, H. Is There a Space-Based Technology Solution to Problems with Preclinical Drug Toxicity Testing? Pharm. Res. 2016, 33, 1545–1551. [Google Scholar] [CrossRef] [Green Version]
- Qian, X.; Jacob, F.; Song, M.M.; Nguyen, H.N.; Song, H.; Ming, G.-L. Generation of human brain region–specific organoids using a miniaturized spinning bioreactor. Nat. Protoc. 2018, 13, 565–580. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, L.; Guo, Y.; Zhu, Y.; Qin, J. Engineering stem cell-derived 3D brain organoids in a perfusable organ-on-a-chip system. RSC Adv. 2018, 8, 1677–1685. [Google Scholar] [CrossRef] [Green Version]
- Wuest, S.L.; Richard, S.; Kopp, S.; Grimm, D.; Egli, M. Simulated Microgravity: Critical Review on the Use of Random Positioning Machines for Mammalian Cell Culture. BioMed Res. Int. 2015, 2015, 971474. [Google Scholar] [CrossRef] [Green Version]
- Van Loon, J.J.W.A. Some history and use of the random positioning machine, RPM, in gravity related research. Adv. Space Res. 2007, 39, 1161–1165. [Google Scholar] [CrossRef]
- Silvani, G.; Bradbury, P.; Basirun, C.; Mehner, C.; Zalli, D.; Poole, K.; Chou, J. Testing 3D printed biological platform for advancing simulated microgravity and space mechanobiology research. npj Microgravity 2022, 8, 19. [Google Scholar] [CrossRef]
- Hoson, T.; Kamisaka, S.; Masuda, Y.; Yamashita, M. Changes in plant growth processes under microgravity conditions simulated by a three-dimensional clinostat. Bot. Mag. Tokyo 1992, 105, 53–70. [Google Scholar] [CrossRef]
- Hoson, T.; Kamisaka, S.; Masuda, Y.; Yamashita, M.; Buchen, B. Evaluation of the three-dimensional clinostat as a simulator of weightlessness. Planta 1997, 203, S187–S197. [Google Scholar] [CrossRef]
- Meslnad, D.A.M. Novel Ground-based Facilities for Research in the Effects of Weight. Microgravity News ESA 1996, 9, 5–10. [Google Scholar]
- Borst, A.G.; Van Loon, J.J. Technology and developments for the random positioning machine, RPM. Microgravity Sci. Technol. 2009, 21, 287–292. [Google Scholar] [CrossRef]
- Wuest, S.L.; Richard, S.; Walther, I.; Furrer, R.; Anderegg, R.; Sekler, J.; Egli, M. A Novel Microgravity Simulator Applicable for Three-Dimensional Cell Culturing. Microgravity Sci. Technol. 2014, 26, 77–88. [Google Scholar] [CrossRef]
- Damm, T.B.; Walther, I.; Wüest, S.L.; Sekler, J.; Egli, M. Cell cultivation under different gravitational loads using a novel random positioning incubator. Biotechnol. Bioeng. 2014, 111, 1180–1190. [Google Scholar] [CrossRef] [Green Version]
- Kühn, J.; Pache, C.; Westphal, K.; Toy, M.F.; Büchi, O.; Depeursinge, C.; Egli, M.; Franco-Obregón, A.; Parent, J. Digital holographic microscopy real-time monitoring of cytoarchitectural alterations during simulated microgravity. J. Biomed. Opt. 2010, 15, 026021. [Google Scholar] [CrossRef] [Green Version]
- Toy, M.F.; Pache, C.; Parent, J.; Kühn, J.; Egli, M.; Depeursinge, C. Dual-mode digital holographic and fluorescence microscopy for the study of morphological changes in cells under simulated microgravity. In Three-Dimensional and Multidimensional Microscopy: Image Acquisition and Processing XVII; SPIE: Bellingham, WA, USA, 2010. [Google Scholar]
- Neelam, S.; Lee, A.; Lane, M.A.; Udave, C.; Levine, H.G.; Zhang, Y. Module to Support Real-Time Microscopic Imaging of Living Organisms on Ground-Based Microgravity Analogs. Appl. Sci. 2021, 11, 3122. [Google Scholar] [CrossRef]
- Kiss, J.Z.; Wolverton, C.; Wyatt, S.E.; Hasenstein, K.H.; van Loon, J.J. Comparison of Microgravity Analogs to Spaceflight in Studies of Plant Growth and Development. Front. Plant Sci. 2019, 10, 1577. [Google Scholar] [CrossRef] [Green Version]
- Anil-Inevi, M.; Sarigil, O.; Kizilkaya, M.; Mese, G.; Tekin, H.C.; Ozcivici, E. Stem Cell Culture under Simulated Microgravity; Springer International Publishing: New York, NY, USA, 2020; pp. 105–132. [Google Scholar]
- Przystupski, D.; Górska, A.; Michel, O.; Podwin, A.; Śniadek, P.; Łapczyński, R.; Saczko, J.; Kulbacka, J. Testing Lab-on-a-Chip Technology for Culturing Human Melanoma Cells under Simulated Microgravity. Cancers 2021, 13, 402. [Google Scholar] [CrossRef] [PubMed]
- Silvani, G.; Basirun, C.; Wu, H.; Mehner, C.; Poole, K.; Bradbury, P.; Chou, J. A 3D-Bioprinted Vascularized Glioblastoma-on-a-Chip for Studying the Impact of Simulated Microgravity as a Novel Pre-Clinical Approach in Brain Tumor Therapy. Adv. Ther. 2021, 4, 2100106. [Google Scholar] [CrossRef]
- Anil-Inevi, M.; Yalcin-Ozuysal, O.; Sarigil, O.; Mese, G.; Ozcivici, E.; Yaman, S.; Tekin, H. Biofabrication of Cellular Structures Using Weightlessness as a Biotechnological Tool; IEEE: Piscataway, NJ, USA, 2019. [Google Scholar]
- Herranz, R.; Larkin, O.J.; Dijkstra, C.E.; Hill, R.J.A.; Anthony, P.; Davey, M.R.; Eaves, L.; Van Loon, J.J.; Medina, F.J.; Marco, R. Microgravity simulation by diamagnetic levitation: Effects of a strong gradient magnetic field on the transcriptional profile of Drosophila melanogaster. BMC Genom. 2012, 13, 52. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Beaugnon, E.; Tournier, R. Levitation of water and organic substances in high static magnetic fields. J. Phys. III 1991, 1, 1423–1428. [Google Scholar] [CrossRef] [Green Version]
- Beaugnon, E.; Tournier, R. Levitation of organic materials. Nature 1991, 349, 470. [Google Scholar] [CrossRef]
- Gao, Q.; Yan, H.; Zou, H.; Li, W.; Peng, Z.; Meng, G.; Zhang, W. Magnetic levitation using diamagnetism: Mechanism, applications and prospects. Sci. China Technol. Sci. 2021, 64, 44–58. [Google Scholar] [CrossRef]
- Hammer, B.E.; Kidder, L.S.; Williams, P.C.; Xu, W.W. Magnetic Levitation of MC3T3 Osteoblast Cells as a Ground-Based Simulation of Microgravity. Microgravity Sci. Technol. 2009, 21, 311–318. [Google Scholar] [CrossRef] [Green Version]
- Manzano, A.I.; van Loon, J.J.; Christianen, P.C.; Gonzalez-Rubio, J.M.; Medina, F.J.; Herranz, R. Gravitational and magnetic field variations synergize to cause subtle variations in the global transcriptional state of Arabidopsis in vitro callus cultures. BMC Genom. 2012, 13, 105. [Google Scholar] [CrossRef] [Green Version]
- Glover, P.; Cavin, I.; Qian, W.; Bowtell, R.; Gowland, P. Magnetic-field-induced vertigo: A theoretical and experimental investigation. Bioelectromagn. J. Bioelectromagn. Soc. Soc. Phys. Regul. Biol. Med. Eur. Bioelectromagn. Assoc. 2007, 28, 349–361. [Google Scholar] [CrossRef]
- Valiron, O.; Peris, L.; Rikken, G.; Bs, A.S.; Bs, Y.S.; Remy, C.; Job, D. Cellular disorders induced by high magnetic fields. J. Magn. Reson. Imaging 2005, 22, 334–340. [Google Scholar] [CrossRef]
- Anil-Inevi, M.; Yaman, S.; Yildiz, A.A.; Mese, G.; Yalcin-Ozuysal, O.; Tekin, H.C.; Ozcivici, E. Biofabrication of in situ Self Assembled 3D Cell Cultures in a Weightlessness Environment Generated using Magnetic Levitation. Sci. Rep. 2018, 8, 7239. [Google Scholar] [CrossRef] [Green Version]
- Tasoglu, S.; Khoory, J.A.; Tekin, H.C.; Thomas, C.; Karnoub, A.E.; Ghiran, I.C.; Demirci, U. Levitational Image Cytometry with Temporal Resolution. Adv. Mater. 2015, 27, 3901–3908. [Google Scholar] [CrossRef]
- Du, J.; Zeng, L.; Yu, Z.; Chen, S.; Chen, X.; Zhang, Y.; Yang, H. A magnetically enabled simulation of microgravity represses the auxin response during early seed germination on a microfluidic platform. Microsyst. Nanoeng. 2022, 8, 11. [Google Scholar] [CrossRef]
- Robson, D.J.; Cappelletti, C. Biomedical payloads: A maturing application for CubeSats. Acta Astronaut. 2022, 191, 394–403. [Google Scholar] [CrossRef]
- Villela, T.; Costa, C.A.; Brandão, A.M.; Bueno, F.T.; Leonardi, R. Towards the Thousandth CubeSat: A Statistical Overview. Int. J. Aerosp. Eng. 2019, 2019, 5063145. [Google Scholar] [CrossRef]
- Poghosyan, A.; Golkar, A. CubeSat evolution: Analyzing CubeSat capabilities for conducting science missions. Prog. Aerosp. Sci. 2017, 88, 59–83. [Google Scholar] [CrossRef]
- Harandi, B.; Ng, S.; Liddell, L.C.; Gentry, D.M.; Maria, S.R.S. Fluidic-Based Instruments for Space Biology Research in CubeSats. Front. Space Technol. 2022, 3, 853980. [Google Scholar] [CrossRef]
- Ricco, A.J.; Hines, J.W.; Piccini, M.; Parra, M.; Timucin, L.; Barker, V.; Storment, C.; Friedericks, C.; Agasid, E.; Beasley, C.; et al. Autonomous genetic analysis system to study space effects on microorganisms: Results from orbit. In Proceedings of the Transducers 2007-2007 International Solid-State Sensors, Actuators and Microsystems Conference, Lyon, France, 10–14 June 2007; IEEE: Piscataway, NJ, USA, 2007. [Google Scholar]
- Ricco, A.; Parra, M.; Niesel, D.; Piccini, M.; Ly, D.; McGinnis, M.; Kudlicki, A.; Hines, J.W.; Timucin, L.; Beasley, C.; et al. PharmaSat: Drug dose response in microgravity from a free-flying integrated biofluidic/optical culture-and-analysis satellite. In Microfluidics, BioMEMS, and Medical Microsystems IX; SPIE: Bellingham, WA, USA, 2011. [Google Scholar]
- Nicholson, W.L.; Ricco, A.J.; Agasid, E.; Beasley, C.; Diaz-Aguado, M.; Ehrenfreund, P.; Friedericks, C.; Ghassemieh, S.; Henschke, M.; Hines, J.W.; et al. The O/OREOS Mission: First Science Data from the Space Environment Survivability of Living Organisms (SESLO) Payload. Astrobiology 2011, 11, 951–958. [Google Scholar] [CrossRef]
- Park, J.; Salmi, M.L.; Wan Salim, W.W.A.; Rademacher, A.; Wickizer, B.; Schooley, A.; Benton, J.; Cantero, A.; Argote, P.F.; Ren, M.; et al. An autonomous lab on a chip for space flight calibration of gravity-induced transcellular calcium polarization in single-cell fern spores. Lab A Chip 2017, 17, 1095–1103. [Google Scholar] [CrossRef]
- Padgen, M.R.; Chinn, T.N.; Friedericks, C.R.; Lera, M.P.; Chin, M.; Parra, M.P.; Piccini, M.E.; Ricco, A.J.; Spremo, S.M. The EcAMSat fluidic system to study antibiotic resistance in low earth orbit: Development and lessons learned from space flight. Acta Astronaut. 2020, 173, 449–459. [Google Scholar] [CrossRef]
- Ricco, A.J.; Maria, S.R.S.; Hanel, R.P.; Bhattacharya, S. BioSentinel: A 6U Nanosatellite for Deep-Space Biological Science. IEEE Aerosp. Electron. Syst. Mag. 2020, 35, 6–18. [Google Scholar] [CrossRef] [Green Version]
- Tieze, S.M.; Liddell, L.C.; Maria, S.R.S.; Bhattacharya, S. BioSentinel: A Biological CubeSat for Deep Space Exploration. Astrobiology 2020. [Google Scholar] [CrossRef]
- Masud, M.K.; Umer, M.; Hossain, S.A.; Yamauchi, Y.; Nguyen, N.-T.; Shiddiky, M.J. Nanoarchitecture Frameworks for Electrochemical miRNA Detection. Trends Biochem. Sci. 2019, 44, 433–452. [Google Scholar] [CrossRef] [PubMed]
- Kuang, S.; Singh, N.M.; Wu, Y.; Shen, Y.; Ren, W.; Tu, L.; Yong, K.-T.; Song, P. Role of microfluidics in accelerating new space missions. Biomicrofluidics 2022, 16, 021503. [Google Scholar] [CrossRef] [PubMed]
- Podwin, A.K.; Śniadek, P.; Jurga, M.; Białas, M.; Kaczmarek-Pieńczewska, A.; Matkowski, K.; Walczak, R.; Dziuban, J. Lab-on-Chip Culturing System for Fungi—Towards Nanosatellite Missions. Appl. Sci. 2022, 12, 10627. [Google Scholar]
- Mesland, D.A.; Anton, A.H.; Willemsen, H.; Van den Ende, H. The Free Fall Machine—A ground-based facility for microgravity research in life sciences. Microgravity Sci. Technol. 1996, 9, 10–14. [Google Scholar]
- Schwarzenberg, M.; Pippia, P.; A Meloni, M.; Cossu, G.; Cogoli-Greuter, M.; Cogoli, A. Microgravity simulations with human lymphocytes in the free fall machine and in the random positioning machine. J. Gravit. Physiol. A J. Int. Soc. Gravit. Physiol. 1998, 5, 23–26. [Google Scholar]
- Schwarzenberg, M.; Pippia, P.; Meloni, M.A.; Cossu, G.; Cogoli-Greuter, M.; Cogoli, A. Signal transduction in T lymphocytes—A comparison of the data from space, the free fall machine and the random positioning machine. Adv. Space Res. 1999, 24, 793–800. [Google Scholar] [CrossRef]
- Ulbrich, C.; Wehland, M.; Pietsch, J.; Aleshcheva, G.; Wise, P.; van Loon, J.; Magnusson, N.; Infanger, M.; Grosse, J.; Eilles, C.; et al. The Impact of Simulated and Real Microgravity on Bone Cells and Mesenchymal Stem Cells. BioMed Res. Int. 2014, 2014, 928507. [Google Scholar] [CrossRef] [Green Version]
- Van Loon, J.J. Centrifuges for microgravity simulation. The reduced gravity paradigm. Front. Astron. Space Sci. 2016, 3, 21. [Google Scholar] [CrossRef] [Green Version]
- Oluwafemi, F.A.; Neduncheran, A. Analog and simulated microgravity platforms for life sciences research: Their individual capacities, benefits and limitations. Adv. Space Res. 2022, 69, 2921–2929. [Google Scholar] [CrossRef]
- Aceto, J.; Nourizadeh-Lillabadi, R.; Marée, R.; Dardenne, N.; Jeanray, N.; Wehenkel, L.; Aleström, P.; van Loon, J.J.W.A.; Muller, M. Zebrafish Bone and General Physiology Are Differently Affected by Hormones or Changes in Gravity. PLoS ONE 2015, 10, e0126928. [Google Scholar] [CrossRef] [Green Version]
- Nooij, S.A.; Bos, J.E.; Groen, E.L.; Bles, W.; Ockels, W.J. Space sickness on earth. Microgravity Sci. Technol. 2007, 19, 113–117. [Google Scholar] [CrossRef]
- Chung, S.K.; Trinh, E.H. Containerless protein crystal growth in rotating levitated drops. J. Cryst. Growth 1998, 194, 384–397. [Google Scholar] [CrossRef]
- Sun, Y.; Muta, H.; Ohishi, Y. Novel Method for Surface Tension Measurement: The Drop-Bounce Method. Microgravity Sci. Technol. 2021, 33, 1–10. [Google Scholar] [CrossRef]
- Cao, H.-L.; Yin, D.-C.; Guo, Y.-Z.; Ma, X.-L.; He, J.; Guo, W.-H.; Xie, X.-Z.; Zhou, B.-R. Rapid crystallization from acoustically levitated droplets. J. Acoust. Soc. Am. 2012, 131, 3164–3172. [Google Scholar] [CrossRef]
- Li, L.; Gu, N.; Dong, H.; Li, B.; Kenneth, T.V.G. Analysis of the effects of acoustic levitation to simulate the microgravity environment on the development of early zebrafish embryos. RSC Adv. 2020, 10, 44593–44600. [Google Scholar] [CrossRef]
- Sun, Y.; Duan, G.; Yamaji, A.; Takatani, T.; Muta, H.; Ohishi, Y. Validating ground-based aerodynamic levitation surface tension measurements through a study on Al2O3. npj Microgravity 2022, 8, 26. [Google Scholar] [CrossRef]
- Kamal, K.Y.; Herranz, R.; van Loon, J.J.W.A.; Medina, F.J. Simulated microgravity, Mars gravity, and 2 g hypergravity affect cell cycle regulation, ribosome biogenesis, and epigenetics in Arabidopsis cell cultures. Sci. Rep. 2018, 8, 6424. [Google Scholar] [CrossRef] [Green Version]
- Lyon, C.J. Lateral Transport of Auxin Mediated by Gravity in the Absence of Special Georeceptor Tissue. Plant Physiol. 1971, 48, 642–644. [Google Scholar] [CrossRef] [Green Version]
- Laurinavicius, R.; Svegzdiene, D.; Buchen, B.; Sievers, A. Determination of the threshold acceleration for the gravitropic stimulation of cress roots and hypocotyls. Adv. Space Res. 1998, 21, 1203–1207. [Google Scholar] [CrossRef] [PubMed]
- Valles, J.; Maris, H.; Seidel, G.; Tang, J.; Yao, W. Magnetic levitation-based Martian and Lunar gravity simulator. Adv. Space Res. 2005, 36, 114–118. [Google Scholar] [CrossRef] [PubMed]
- Podwin, A.K.; Jarosz, J.; Śniadek, P.; Psurski, M.; Graja, A.; Białas, M.; Oliszewska, E.; Wietrzyk, J.; Walczak, R.; Dziuban, J. Microfluidic-Assisted Human Cancer Cells Culturing Platform for Space Biology Applications. Sensors 2022, 22, 6183. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Features | Simulation Technique | Microgravity Quality | Microgravity Duration | |
|---|---|---|---|---|---|
| Clinostat | Cuvette/Pipette | Shape—Cylinder | Rotation | ≤10−3 g | Hours to Weeks |
| Diameter—3.5 mm | |||||
| Slide Flask | Shape—Rectangle | ||||
| Width—9 cm | |||||
| Length—9 cm | |||||
| Submersed | Shape—Cylinder | ||||
| Diameter—4.1 mm | |||||
| PMT | Shape—Cylinder | ||||
| Diameter—4 mm | |||||
| Length—5 cm | |||||
| Microscope | Shape—Cylinder | ||||
| Diameter—30 mm | |||||
| RWV | STLV | Shape—Cylinder | Rotation | ≤10−3 g | Hours to Weeks |
| Diameter—9.5 cm | |||||
| Length—9.6 cm | |||||
| HARV | Shape—Cylinder | ||||
| Diameter—12.7 cm | |||||
| Length—0.64 cm | |||||
| RWPV | Shape—Cylinder | ||||
| Diameter—5 cm | |||||
| Length—7 cm | |||||
| RPM | Desktop RPM | Shape—Cubic | Rotation | 10−4 g | Hours to Weeks |
| RPI | |||||
| MGI | |||||
| Diamagnetic Levitation | Bitter Magnet | Features can vary according to the experiment | Magnetic Force | <10−2 g | Minutes to Hours |
| Superconducting Magnet | |||||
| Permanent Magnet | |||||
| CubeSat | GeneSat-1 | CubeSat Size—3U | 10−6 g | 21 days | |
| Payload Size—2U | |||||
| Weight—6.8 kg | |||||
| PharmaSat | CubeSat Size—3U | >21 days | |||
| Payload Size—2U | |||||
| Weight—5.5 kg | |||||
| O/OREOS | CubeSat Size—3U | 6 months | |||
| Payload Size—1U | |||||
| Weight—5.5 kg | |||||
| SporeSat | CubeSat Size—3U | Not Given | |||
| Payload Size—2U | |||||
| Weight—5.5kg | |||||
| EcAMSat | CubeSat Size—6U | >120 days | |||
| Payload Size—3U | |||||
| Weight—14 kg | |||||
| BioSentinel | CubeSat Size—6U | 6–12 months | |||
| Payload Size—4U | |||||
| Weight—14 kg |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vashi, A.; Sreejith, K.R.; Nguyen, N.-T. Lab-on-a-Chip Technologies for Microgravity Simulation and Space Applications. Micromachines 2023, 14, 116. https://doi.org/10.3390/mi14010116
Vashi A, Sreejith KR, Nguyen N-T. Lab-on-a-Chip Technologies for Microgravity Simulation and Space Applications. Micromachines. 2023; 14(1):116. https://doi.org/10.3390/mi14010116
Chicago/Turabian StyleVashi, Aditya, Kamalalayam Rajan Sreejith, and Nam-Trung Nguyen. 2023. "Lab-on-a-Chip Technologies for Microgravity Simulation and Space Applications" Micromachines 14, no. 1: 116. https://doi.org/10.3390/mi14010116
APA StyleVashi, A., Sreejith, K. R., & Nguyen, N.-T. (2023). Lab-on-a-Chip Technologies for Microgravity Simulation and Space Applications. Micromachines, 14(1), 116. https://doi.org/10.3390/mi14010116