


Pulsation Reduction Using Dual Sidewall-Driven Micropumps


Abstract
:1. Introduction
2. Materials and Methods
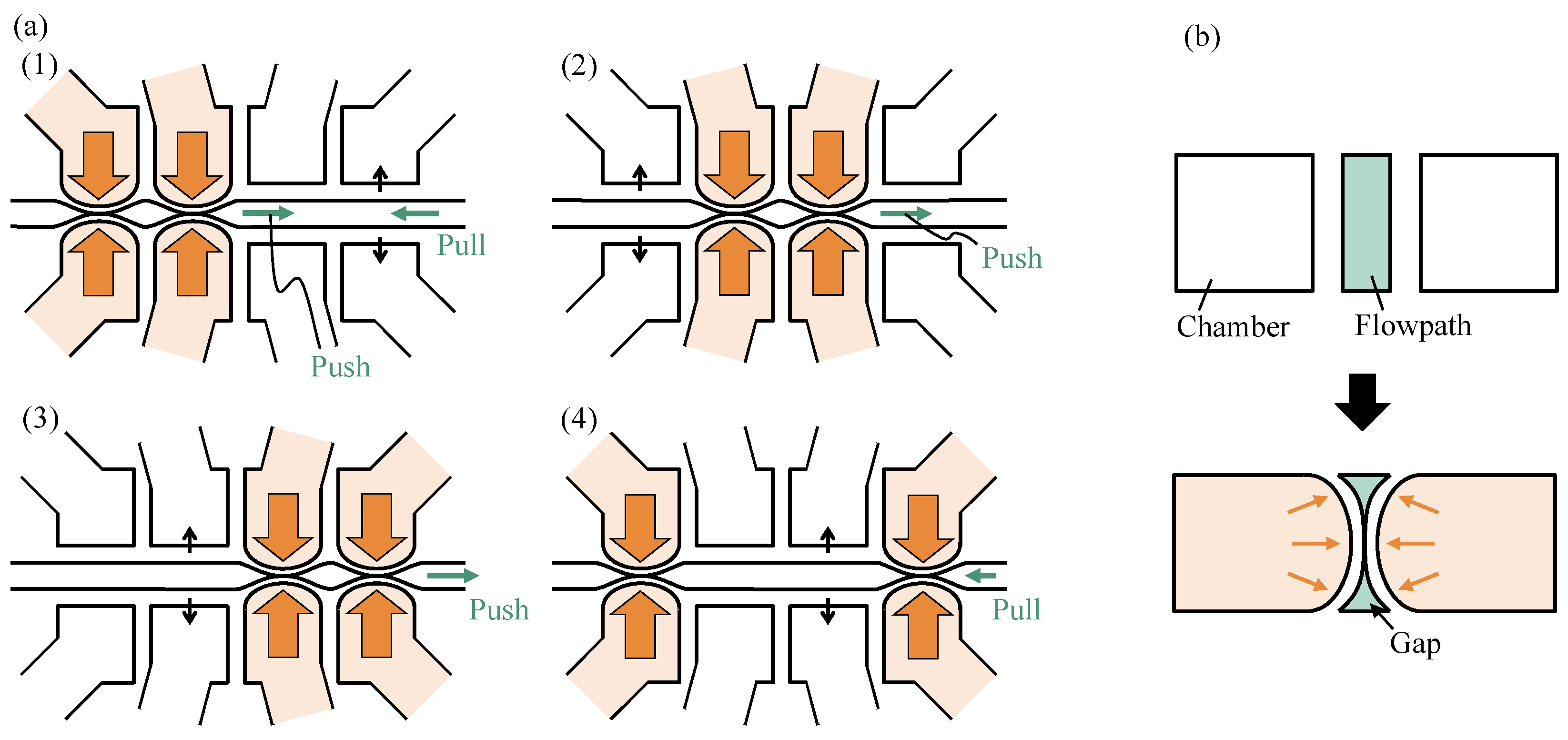
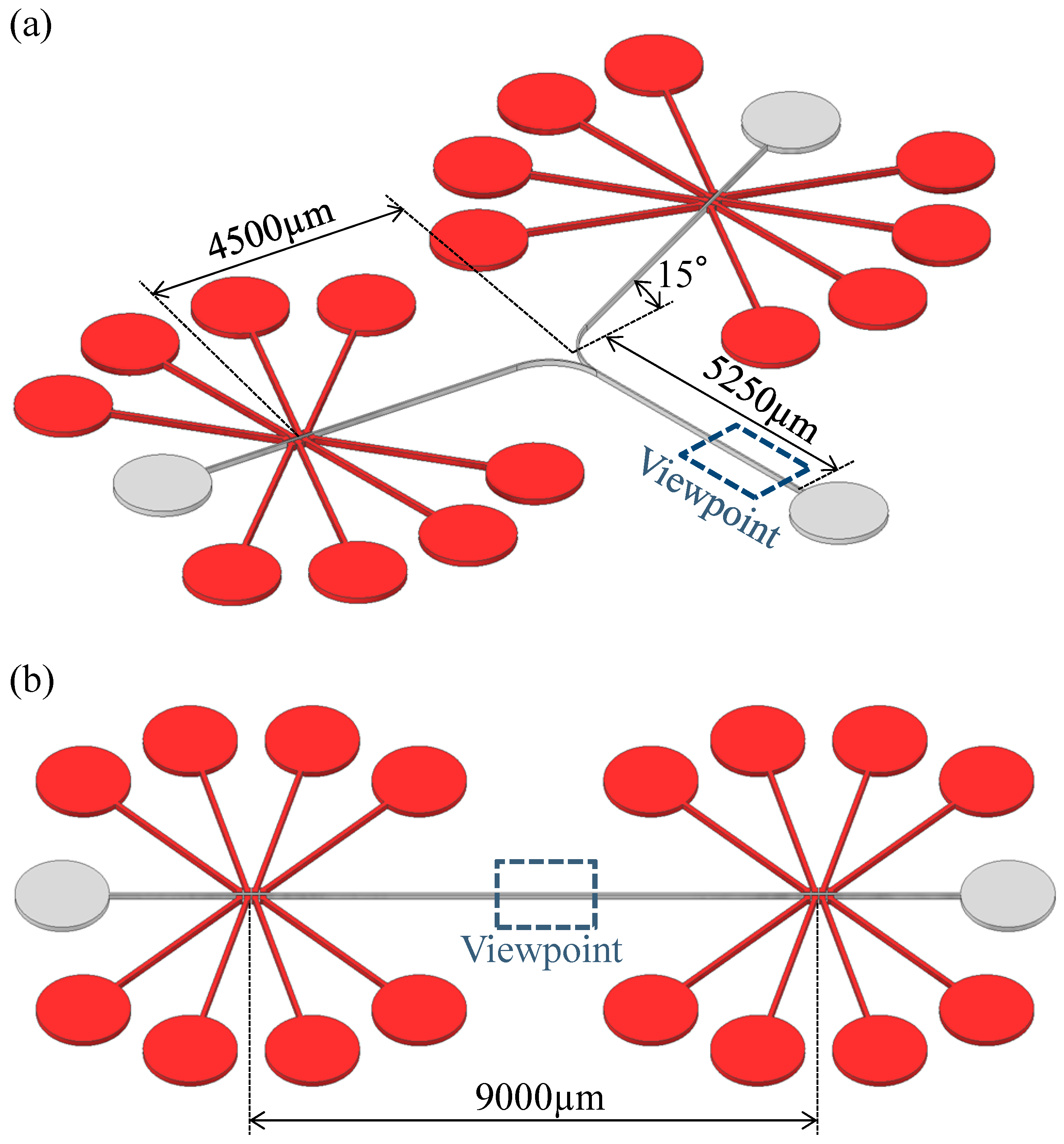
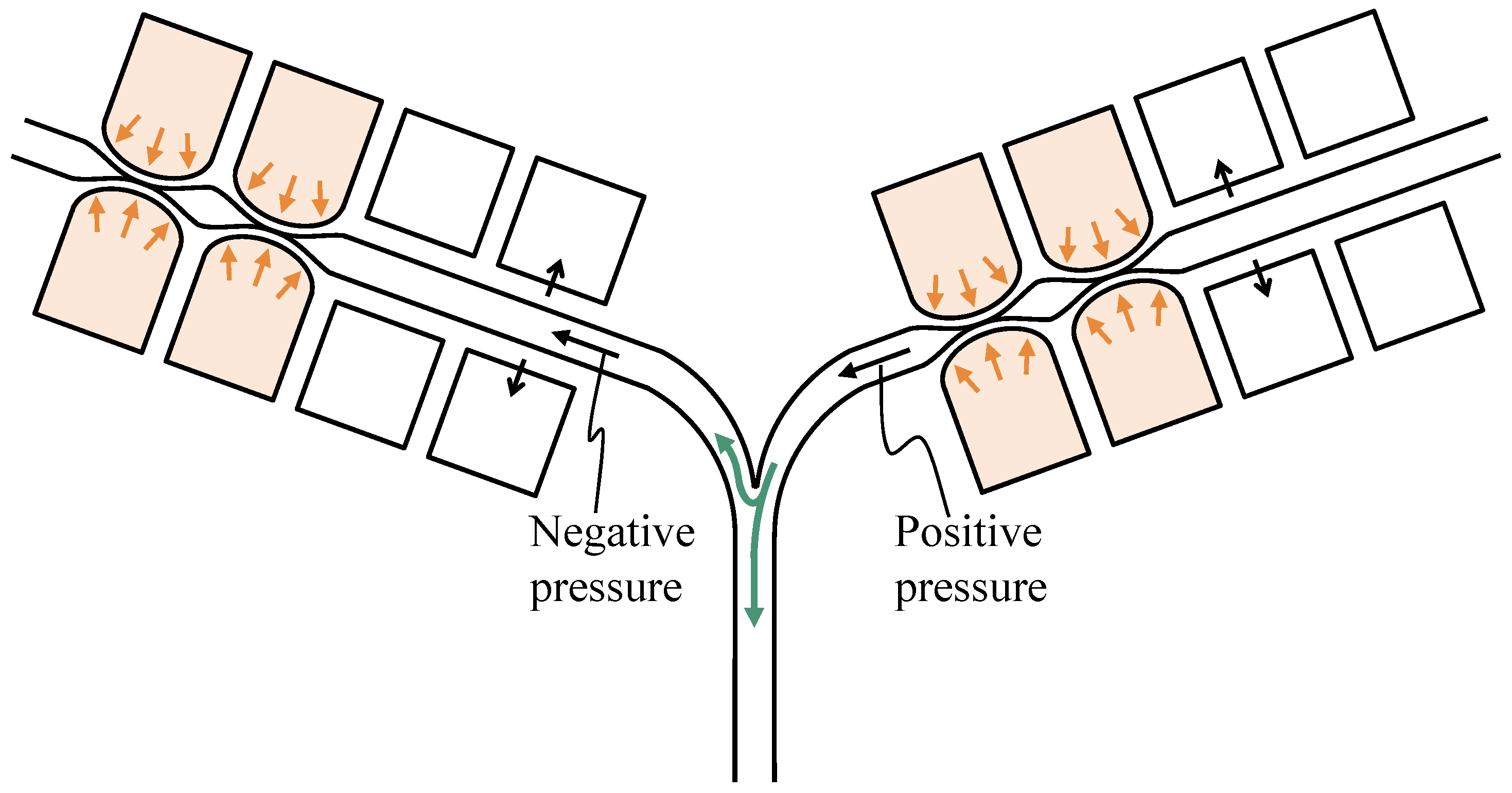
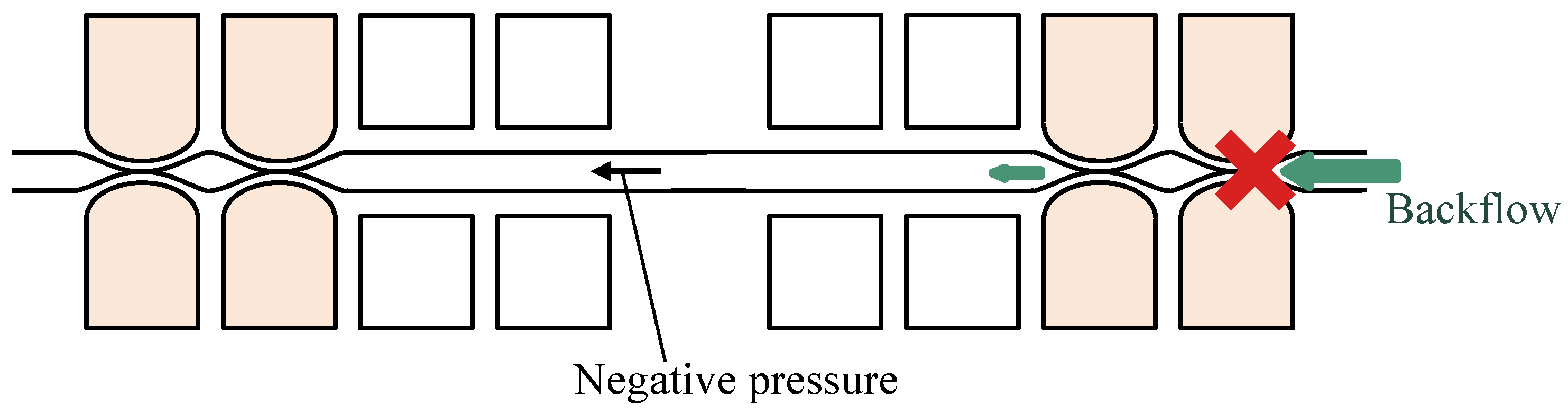
2.1. Principle and Channel Design
2.2. Microchip Fabrication
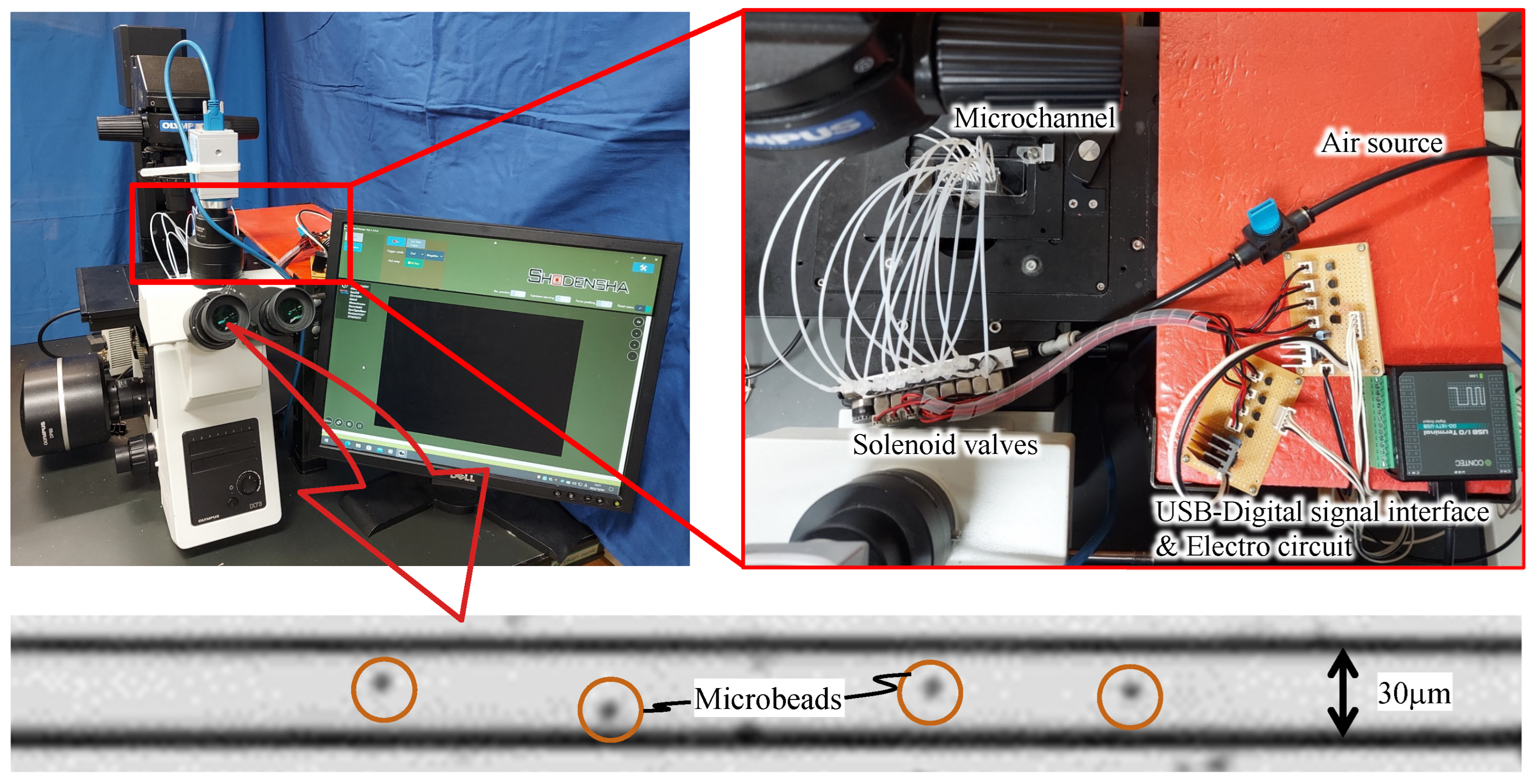
2.3. Experimental Setup and Procedures
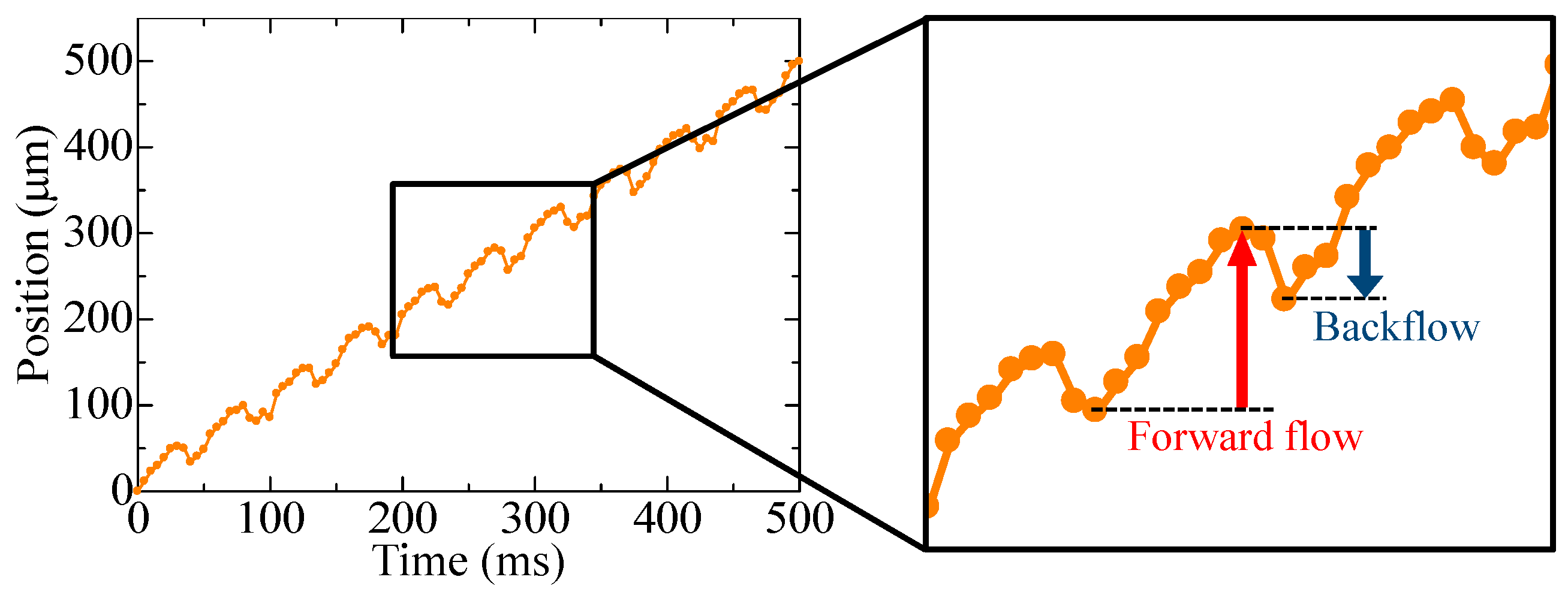
3. Results
3.1. Single Pump
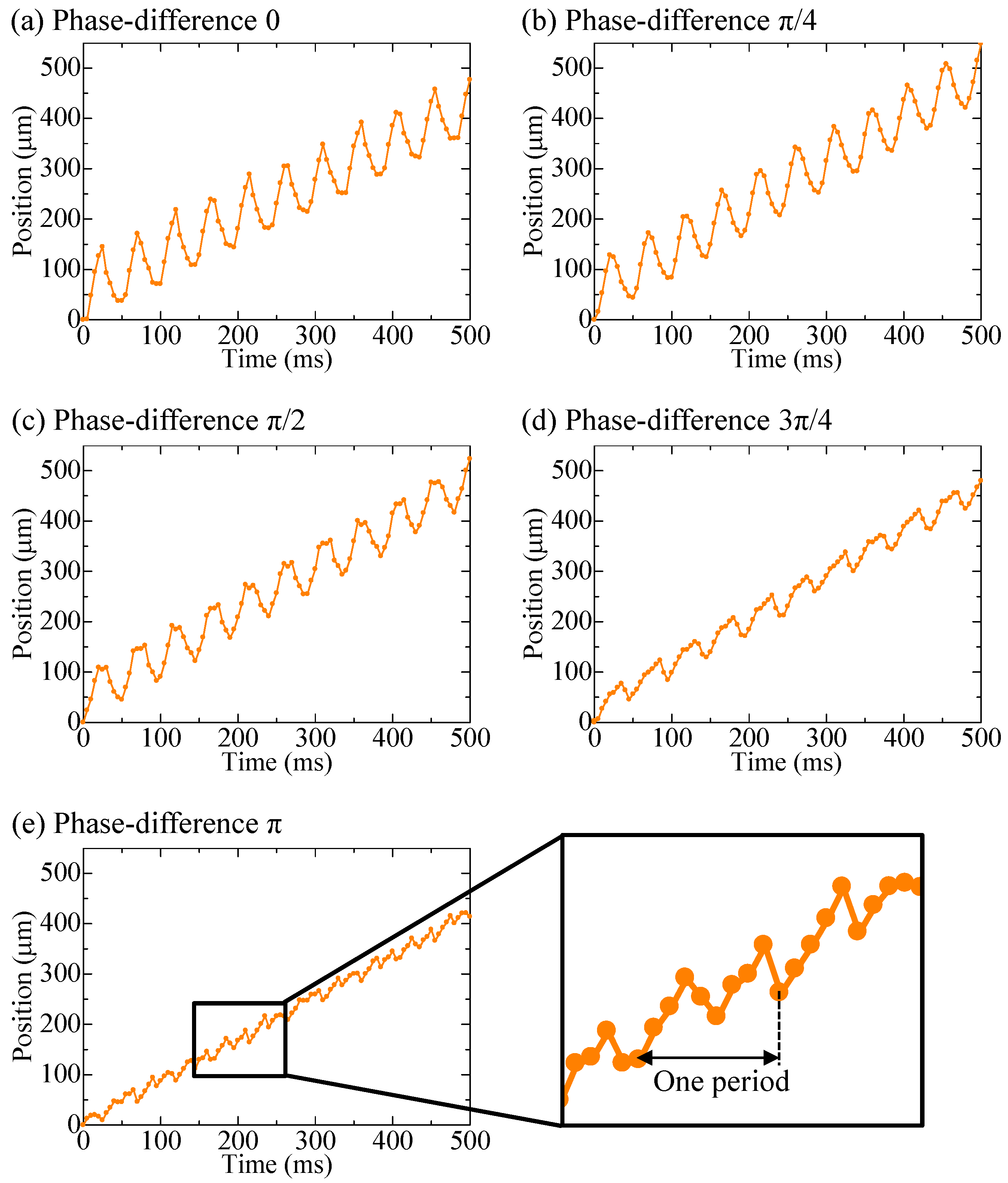
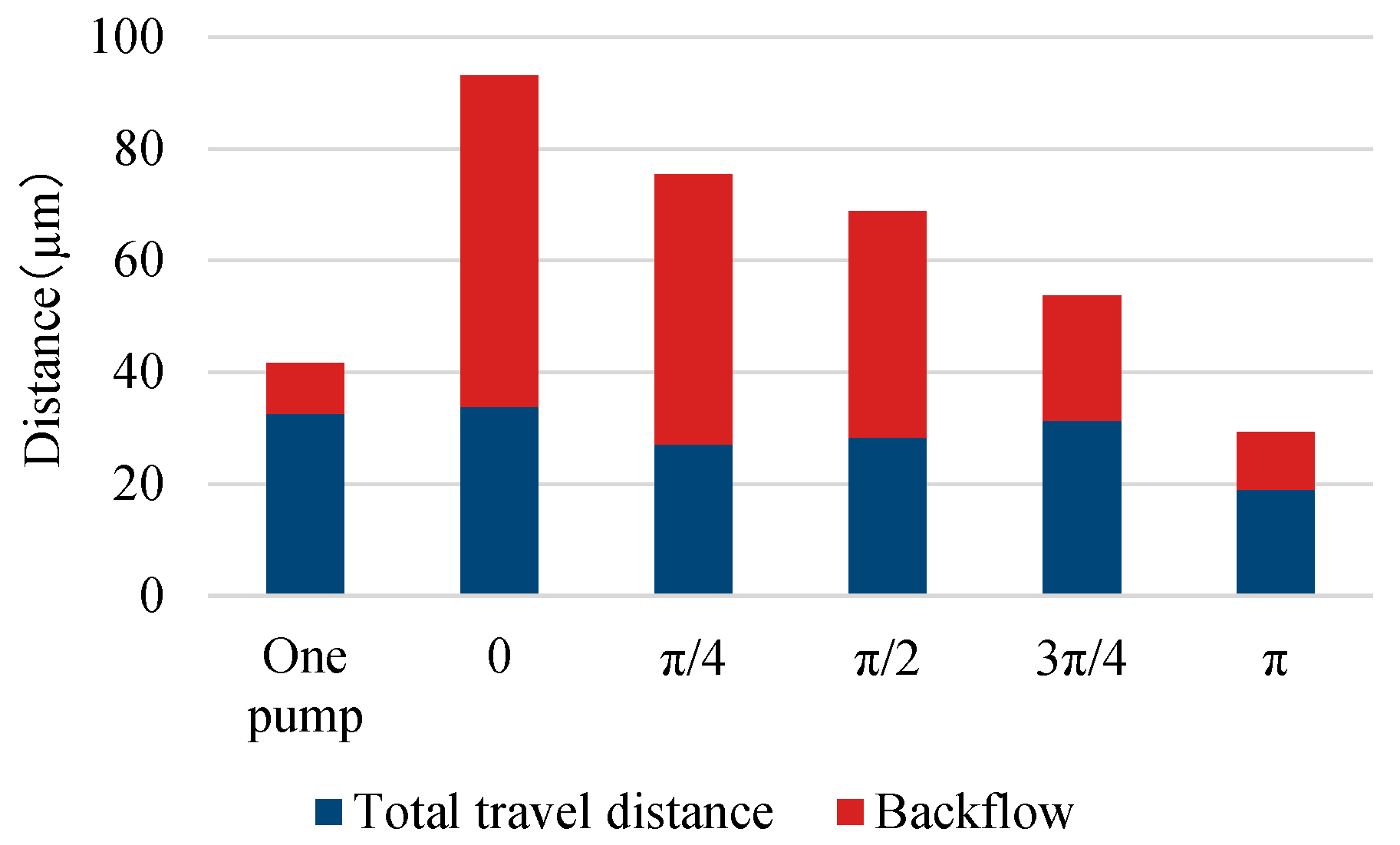
3.2. Parallel Pump
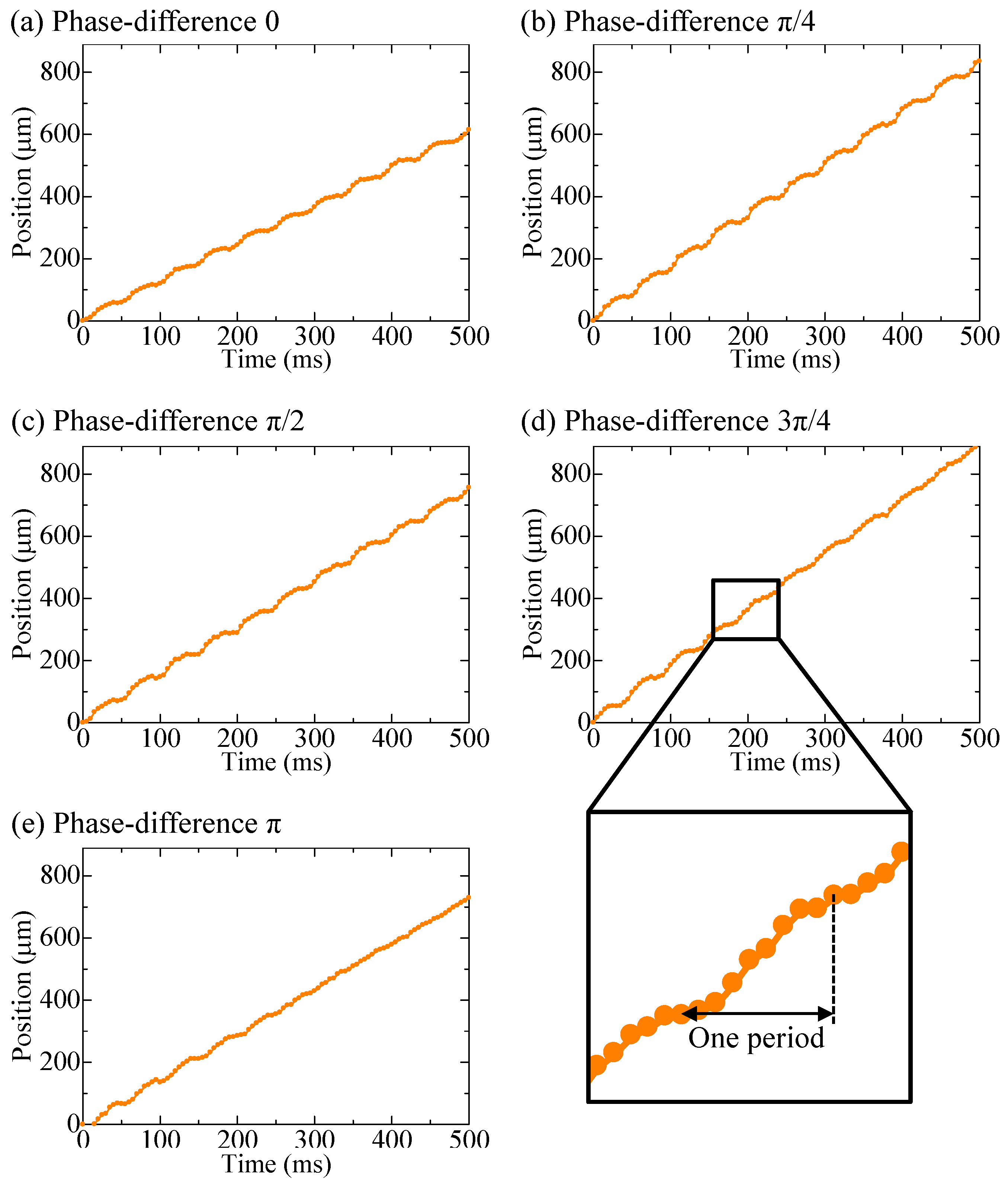
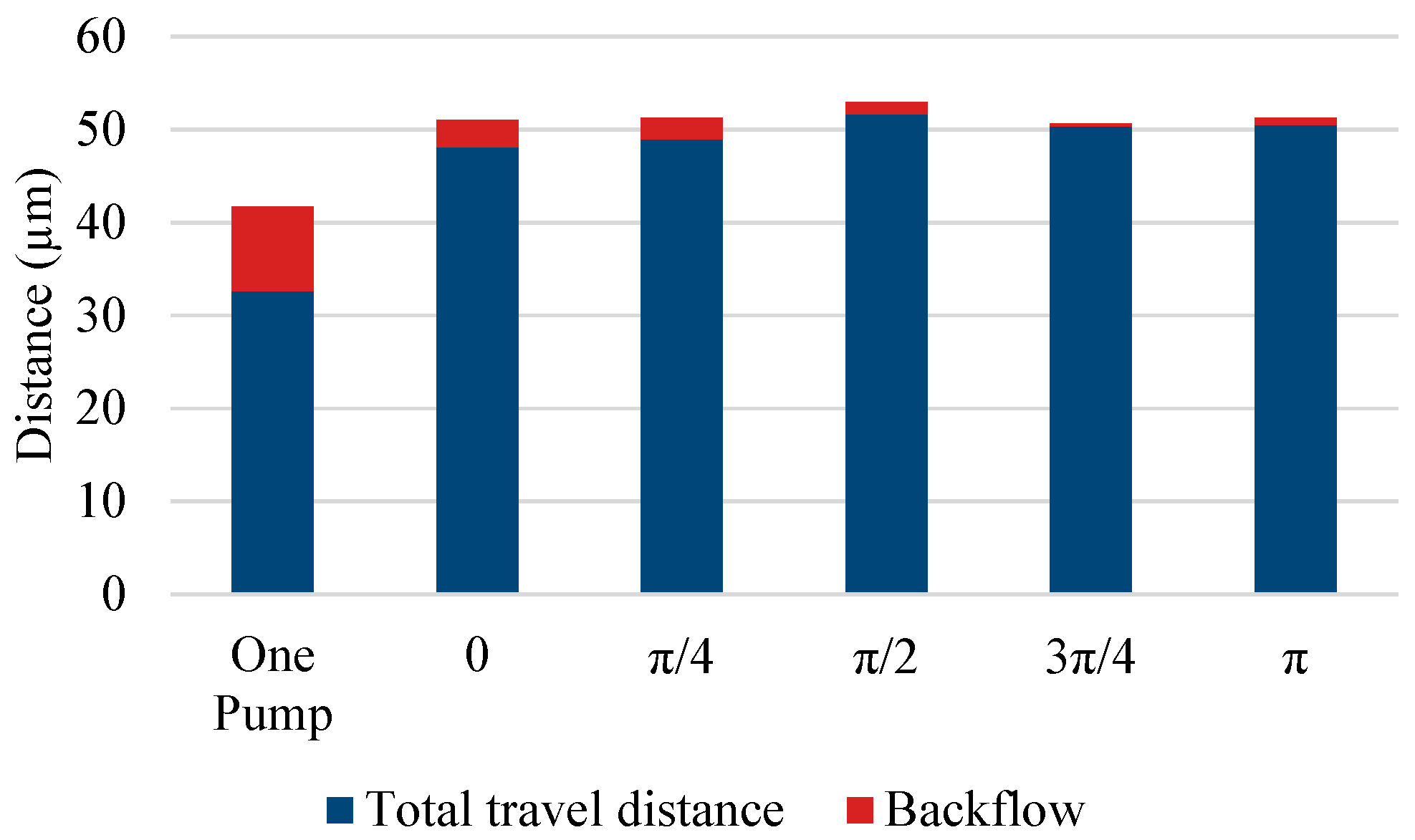
3.3. Series Pump
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sousa, P.C.; Pinho, F.T.; Oliviera, M.S.N.; Alves, M.A. Extensional flow of blood analog solutions in microfluidic devices. Biomicrofluidics 2011, 5, 014108. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, X.; Fan, B.; Cao, S.; Chen, D.; Zhao, X.; Men, D.; Yue, W.; Wang, J.; Chen, J. A microfluidic flow cytometer enabling absolute quantification of single-cell intracellular proteins. Lab Chip 2017, 17, 3129. [Google Scholar] [CrossRef] [PubMed]
- Braunmüller, S.; Schmid, L.; Franke, T. Dynamics of red blood cells and vesicles in microchannels of oscillating width. J. Phys. Condens. Matter 2011, 23, 184116. [Google Scholar] [CrossRef] [PubMed]
- Eriksson, E.; Scrimgeour, J.; Granéli, A.; Ramser, K.; Wellander, R.; Enger, J.; Hanstorp, D.; Goksör, M. Optical manipulation and microfluidics for studies of single cell dynamics. J. Opt. A Pure Appl. Opt. 2007, 9, S113–S121. [Google Scholar] [CrossRef]
- Zhao, Y.; Wang, K.; Chen, D.; Fan, B.; Xu, Y.; Ye, Y.; Wang, J.; Chen, J.; Huang, C. Development of microfluidic impedance cytometry enabling the quantification of specific membrane capacitance and cytoplasm conductivity from 100,000 single cells. Biosens. Bioelectron. 2018, 111, 138–143. [Google Scholar] [CrossRef] [PubMed]
- Myrand-Lapierre, M.E.; Deng, X.; Ang, R.R.; Matthews, K.; Santoso, A.T.; Ma, H. Multiplexed fluidic plunger mechanism for the measurement of red blood cell deformability. Lab Chip 2015, 15, 159–167. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sakuma, S.; Kuroda, K.; Tsai, C.H.; Fukui, W.; Arai, F. Red blood cell fatigue evaluation based on the close-encountering point between extensibility and recoverability. Lab Chip 2014, 14, 1135–1141. [Google Scholar] [CrossRef]
- Mizoue, K.; Yagyu, N.; Tsai, C.H.; Kaneko, M. Hybrid actuation for long-term cell manipulation in a microfluidic channel. In Proceedings of the 2017 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Munich, Germany, 3–7 July 2017. [Google Scholar]
- Mitos P-Pump|Dolomite, Microfluidics. Available online: https://www.dolomite-microfluidics.com/product/mitos-p-pump/ (accessed on 8 December 2022).
- Wang, Z.; Cheng, C.; Wang, S. Electroosmotic pumps and their applications in microfluidic systems. Microfluid. Nanofluidics 2009, 6, 145–162. [Google Scholar] [CrossRef] [Green Version]
- Bengtsson, K.; Christoffersson, J.; Mandenius, C.F.; Robinson, N.D. A clip-on electroosmotic pump for oscillating flow in microfluidic cell culture devices. Microfluid. Nanofluidics 2018, 22, 27. [Google Scholar] [CrossRef] [Green Version]
- Okamoto, Y.; Ryoson, H.; Fujimoto, K.; Ohba, T.; Mita, Y. On-chip CMOS-MEMS-based electroosmotic flow micropump integrated with high-voltage generator. Microelectromech. Syst. 2020, 29, 86–94. [Google Scholar] [CrossRef]
- Alizadeh, A.; Hsu, W.L.; Wang, M.; Daiguji, H. Electroosmotic flow: From microfluidics to nanofluidics. Electrophoresis 2021, 42, 834–868. [Google Scholar] [CrossRef] [PubMed]
- Glawdel, T.; Ren, C.L. Electro-osmotic flow control for living cell analysis in microfluidic PDMS chips. Mech. Res. Commun. 2009, 36, 75–81. [Google Scholar] [CrossRef]
- Glawdel, T.; Elbuken, C.; Lee, L.E.J.; Ren, C.L. Microfluidic system with integrated electroosmotic pumps, concentration gradient generator and fish cell line (RTgill-W1)—Towards water toxicity testing. Lab Chip 2008, 9, 3243–3250. [Google Scholar] [CrossRef] [PubMed]
- Ye, Z.; Zhang, R.; Gao, M.; Deng, Z.; Gui, L. Development of a high flow rate 3-D electroosmotic flow pump. Micromachines 2019, 10, 112. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, J.M.; Yang, L.J. Electro-hydro-dynamic (EHD) micropumps with electrode protection by parylene and gelatin. J. Sci. Eng. 2005, 8, 231–236. [Google Scholar]
- Felten, M.; Geggier, P.; Jäger, M.; Duschl, C. Controlling electrohydrodynamic pumping in microchannels through defined temperature fields. Phys. Fluids 2006, 18, 051707. [Google Scholar] [CrossRef]
- Sato, T.; Yamanishi, Y.; Cacucciolo, V.; Kuwajima, Y.; Shigemune, H.; Cianchetti, M.; Laschi, C.; Maeda, S. Electrohydrodynamic conduction pump with asymmetrical electrode structures in the microchannels. Chem. Lett. 2017, 46, 950–952. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Ren, Y.; Liu, W.; Chen, X.; Tao, Y.; Jiang, H. On controlling the flow behavior driven by induction electrohydrodynamics in microfluidic channels. Electrophoresis 2017, 38, 983–995. [Google Scholar] [CrossRef]
- Leu, T.S.; Ma, F.C. Novel EHD-pump driven micro mixers. J. Mech. 2005, 21, 137–144. [Google Scholar] [CrossRef]
- Mao, Z.; Yoshida, K.; Kim, J. Developing O/O (oil-in-oil) droplet generators on a chip by using ECF (electro-conjugate fluid) micropumps. Sens. Actuat B 2019, 296, 126669. [Google Scholar] [CrossRef]
- Xia, F.; Tadigadapa, S.; Zhang, Q.M. Electroactive polymer based microfluidic pump. Sens. Actuat A 2006, 125, 346–352. [Google Scholar] [CrossRef]
- Zhao, B.; Cui, X.; Ren, W.; Xu, F.; Liu, M.; Ye, Z.G. A Controllable and integrated pump-enabled microfluidic chip and its application in droplets generating. Sens. Actuators A 2006, 125, 346–352. [Google Scholar] [CrossRef] [PubMed]
- Grover, W.H.; Skelley, A.M.; Liu, C.N.; Lagally, E.T.; Mathies, R.A. Monolithic membrane valves and diaphragm pumps for practical large-scale integration into glass microfluidic devices. Sens. Actuators B 2003, 89, 315–323. [Google Scholar] [CrossRef]
- Sin, A.; Reardon, C.F.; Shuler, M.L. A self-priming microfluidic diaphragm pump capable of recirculation fabricated by combining soft lithography and traditional machining. Biotechnol. Bioeng. 2004, 85, 359–363. [Google Scholar] [CrossRef]
- Bußmann, A.; Thalhofer, T.; Hoffmann, S.; Daum, L.; Surendran, N.; Hayden, O.; Hubbuch, J.; Richter, M. Microfluidic cell transport with piezoelectric micro diaphragm pumps. Micromachines 2021, 12, 1459. [Google Scholar] [CrossRef] [PubMed]
- Thalhofer, T.; Keck, M.; Kibler, S.; Hayden, O. Capacitive sensor and alternating drive mixing for microfluidic applications using micro diaphragm pumps. Sensors 2022, 22, 1273. [Google Scholar] [CrossRef] [PubMed]
- Balagaddé, F.K.; You, L.C.; Hansen, C.L.; Arnold, F.H.; Quake, S.R. Long-term monitoring of bacteria undergoing programmed population control in a microchemostat. Science 2005, 309, 137–140. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xiang, J.; Cai, Z.; Zhang, Y.; Wang, W. A micro-cam actuated linear peristaltic pump for microfluidic applications. Sens. Actuat A 2016, 251, 20–25. [Google Scholar] [CrossRef]
- Ma, T.; Sun, S.; Li, B.; Chu, J. Piezoelectric peristaltic micropump integrated on a microfluidic chip. Sens. Actuat A 2019, 292, 90–96. [Google Scholar] [CrossRef]
- Abe, T.; Oh-hara, S.; Ukita, Y. Adoption of reinforcement learning for the intelligent control of a microfluidic peristaltic pump. Biomicrofluidics 2020, 15, 034101. [Google Scholar] [CrossRef]
- Unger, M.A.; Chou, H.P.; Thorsen, T.; Scherer, A.; Quake, S.R. Monolithic microfabricated valves and pumps by multilayer soft lithography. Science 2000, 288, 113–116. [Google Scholar] [CrossRef] [PubMed]
- Suzuki, T.; Hata, H.; Shintaku, H.; Kanno, I.; Kotera, H. Development of valveless micropump piezoelectrically driven by traveling wave, The Japan Society Applied Electromagnetics and Mechanics. Jpn. Soc. Appl. Electromagn. Mech. 2005, 13, 310–315. (In Japanese) [Google Scholar]
- Yamamoto, M.; Nakahara, K.; Okayama, Y.; Yoshimura, K.; Miki, N. Peristaltic micropump using a largely deformable polymer membrane. In Proceedings of the Symposium on Micro-Nano Science and Technology, Tokyo, Japan, 26–27 September 2011. (In Japanese). [Google Scholar]
- Nishikata, K.; Nakamura, M.; Arai, Y.; Futai, N. An Integrated pulsation-Free, backflow-free micropump using the analog waveform-driven braille actuator. Micromachines 2022, 13, 294. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Single | Parallel Pump | Series Pump | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Pump | 0 | 0 | |||||||||
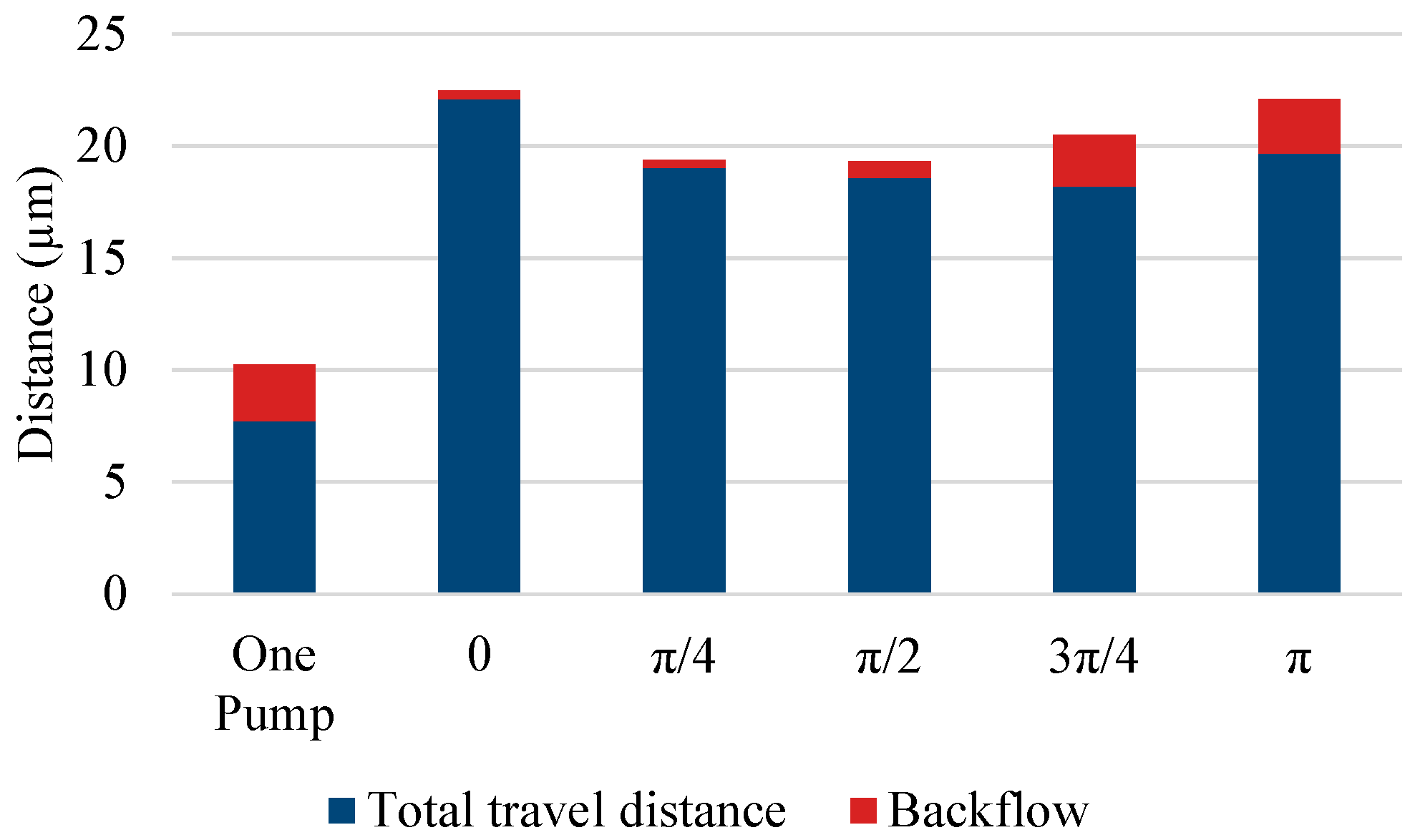
| Flow rate (mm/s) | 0.652 | 0.677 | 0.541 | 0.566 | 0.625 | 0.757 | 0.962 | 0.979 | 1.03 | 1.01 | 1.01 |
| Percentage of backflow relative to forward flow | 21.9% | 63.7% | 64.1% | 58.9% | 41.8% | 35.3% | 5.72% | 4.41% | 2.49% | 0.597% | 1.61% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Atsumi, T.; Takayama, T.; Kaneko, M. Pulsation Reduction Using Dual Sidewall-Driven Micropumps. Micromachines 2023, 14, 19. https://doi.org/10.3390/mi14010019
Atsumi T, Takayama T, Kaneko M. Pulsation Reduction Using Dual Sidewall-Driven Micropumps. Micromachines. 2023; 14(1):19. https://doi.org/10.3390/mi14010019
Chicago/Turabian StyleAtsumi, Takuto, Toshio Takayama, and Makoto Kaneko. 2023. "Pulsation Reduction Using Dual Sidewall-Driven Micropumps" Micromachines 14, no. 1: 19. https://doi.org/10.3390/mi14010019
APA StyleAtsumi, T., Takayama, T., & Kaneko, M. (2023). Pulsation Reduction Using Dual Sidewall-Driven Micropumps. Micromachines, 14(1), 19. https://doi.org/10.3390/mi14010019