
2D-Vector Magnetic Sensing Based on Ring-Shaped Fiber-Optic Structure Coated with Magnetic Fluid
Abstract
:1. Introduction
2. Materials and Methods
3. Results and Discussion
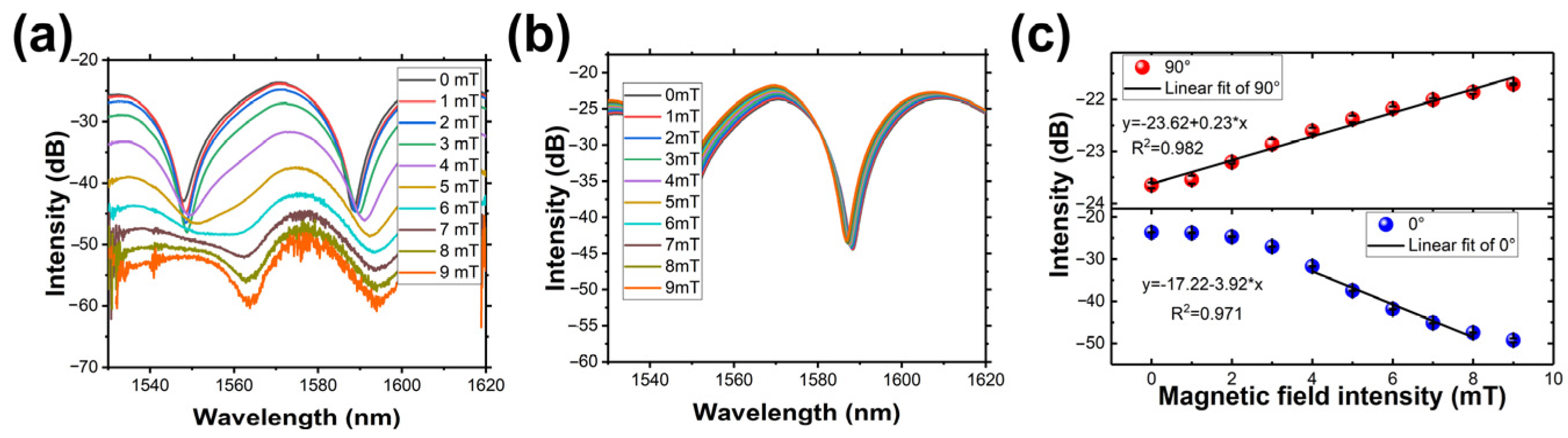
3.1. Response to Dual-Directions Magnetic Field Intensity
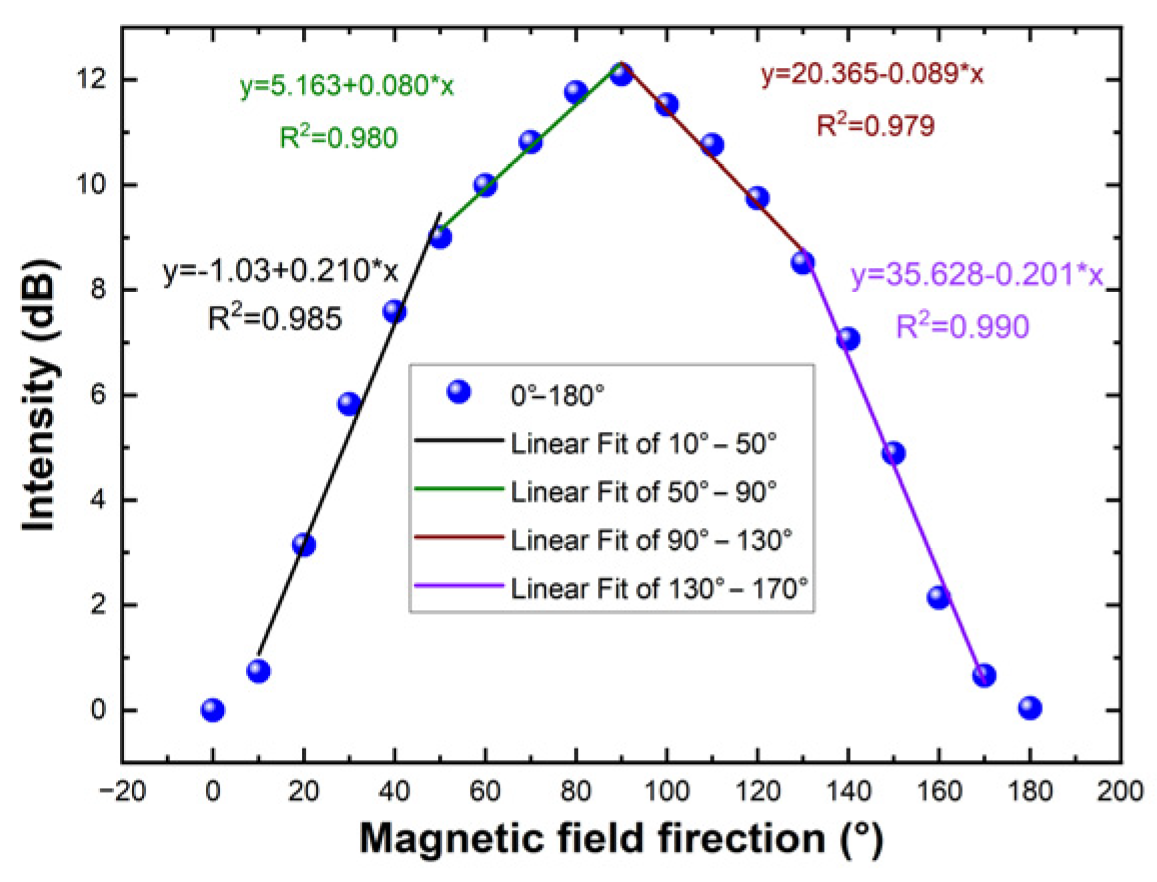
3.2. Response to Magnetic Field Directions
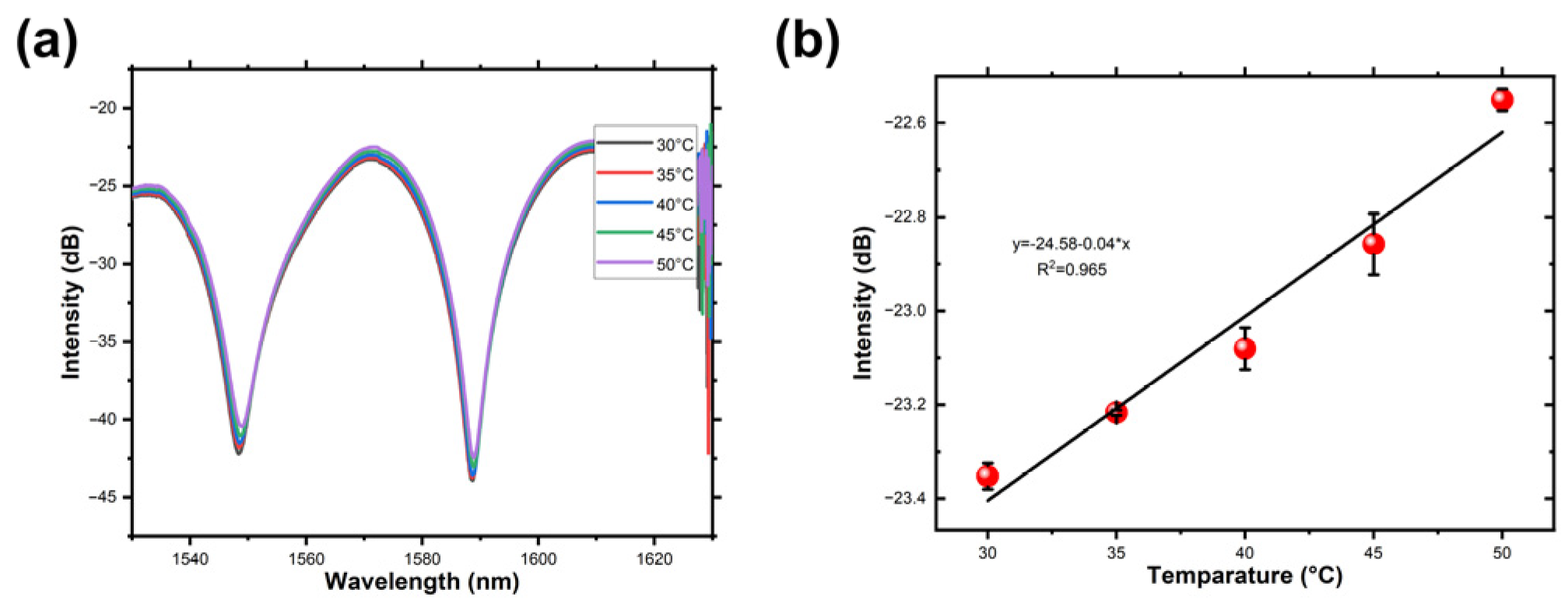
3.3. Response to Temperature
3.4. Comparison and Discussion
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, C.; Pu, S.; Hao, Z.; Wang, B.; Yuan, M.; Zhang, Y. Magnetic Field Sensing Based on Whispering Gallery Mode with Nanostructured Magnetic Fluid-Infiltrated Photonic Crystal Fiber. Nanomaterials 2022, 12, 862. [Google Scholar] [CrossRef]
- Leal-Junior, A.; Díaz, C.; Frizera, A.; Lee, H.; Nakamura, K.; Mizuno, Y.; Marques, C. Highly Sensitive Fiber-Optic Intrinsic Electromagnetic Field Sensing. Adv. Photo Res. 2021, 2, 2000078. [Google Scholar] [CrossRef]
- Chen, M.; Zhao, Y.; Wei, H.; Zhu, C.; Krishnaswamy, S. 3D Printed Castle Style Fabry-Perot Microcavity on Optical Fiber Tip as a Highly Sensitive Humidity Sensor. Sens. Actuators B Chem. 2021, 328, 128981. [Google Scholar] [CrossRef]
- Lopez, J.D.; Dante, A.; Cremonezi, A.O.; Bacurau, R.M.; Carvalho, C.C.; da Silva Barros Allil, R.C.; Ferreira, E.C.; Werneck, M.M. Fiber-Optic Current Sensor Based on FBG and Terfenol-D with Magnetic Flux Concentration for Enhanced Sensitivity and Linearity. IEEE Sens. J. 2020, 20, 3572–3578. [Google Scholar] [CrossRef]
- Zhang, P.; Tang, M.; Gao, F.; Zhu, B.; Fu, S.; Ouyang, J.; Zhao, Z.; Wei, H.; Li, J.; Shum, P.P.; et al. An Ultra-Sensitive Magnetic Field Sensor Based on Extrinsic Fiber-Optic Fabry–Perot Interferometer and Terfenol-D. J. Light. Technol. 2015, 33, 3332–3337. [Google Scholar] [CrossRef]
- Zhao, Y.; Liu, S.; Xiong, C.; Wang, Y.; Li, Z.; Sun, Z.; Li, J.; Wang, Y. Magnetic Field Sensor Based on Helical Long-Period Fiber Grating with a Three-Core Optical Fiber. Opt. Express 2021, 29, 20649. [Google Scholar] [CrossRef]
- Thomas, S.; Mathew, J.; Radhakrishnan, P.; Nampoori, V.P.N.; George, A.K.; Al-Harthi, S.H.; Ramanujan, R.V.; Anantharaman, M.R. Metglas Thin Film Based Magnetostrictive Transducers for Use in Long Period Fibre Grating Sensors. Sens. Actuators A Phys. 2010, 161, 83–90. [Google Scholar] [CrossRef]
- Liu, H.; Zhang, H.; Liu, B.; Song, B.; Wu, J.; Lin, L. Ultra-Sensitive Magnetic Field Sensor with Resolved Temperature Cross-Sensitivity Employing Microfiber-Assisted Modal Interferometer Integrated with Magnetic Fluids. Appl. Phys. Lett. 2016, 109, 042402. [Google Scholar] [CrossRef]
- Yang, S.; Tan, M.; Yu, T.; Li, X.; Wang, X.; Zhang, J. Hybrid Reduced Graphene Oxide with Special Magnetoresistance for Wireless Magnetic Field Sensor. Nano-Micro Lett. 2020, 12, 69. [Google Scholar] [CrossRef]
- Matko, V.; Milanovič, M. Detection principles of temperature compensated oscillators with reactance influence on piezoelectric resonator. Sensors 2020, 20, 802. [Google Scholar] [CrossRef]
- Zhou, X.; Li, X.; Li, S.; An, G.-W.; Cheng, T. Magnetic Field Sensing Based on SPR Optical Fiber Sensor Interacting with Magnetic Fluid. IEEE Trans. Instrum. Meas. 2019, 68, 234–239. [Google Scholar] [CrossRef]
- Li, B.; Zhang, F.; Yan, X.; Zhang, X.; Wang, F.; Cheng, T. An Optical Fiber-Based Surface Plasmon Resonance Sensor for Simultaneous Measurement of Temperature and Magnetic Field Intensity. IEEE Trans. Instrum. Meas. 2022, 71, 7000407. [Google Scholar] [CrossRef]
- Wang, X.; Zhao, Y.; Lv, R.; Zheng, H.; Cai, L. Magnetic Field Measurement Method Based on the Magneto-Volume Effect of Hollow Core Fiber Filled with Magnetic Fluid. IEEE Trans. Instrum. Meas. 2021, 70, 9513708. [Google Scholar] [CrossRef]
- Liang, Y.; Zhang, H.; Guo, H.; Lin, W.; Liu, B. Simultaneous Measurement of Temperature and Magnetic Field Based on Ionic-Liquid-Infiltrated Side-Hole Fibers. J. Light. Technol. 2021, 39, 7001–7007. [Google Scholar] [CrossRef]
- Bao, L.; Dong, X.; Zhang, S.; Shen, C.; Shum, P.P. Magnetic Field Sensor Based on Magnetic Fluid-Infiltrated Phase-Shifted Fiber Bragg Grating. IEEE Sens. J. 2018, 18, 4008–4012. [Google Scholar] [CrossRef]
- Ying, Y.; Zhang, R.; Si, G.-Y.; Wang, X.; Qi, Y.-W. D-Shaped Tilted Fiber Bragg Grating Using Magnetic Fluid for Magnetic Field Sensor. Opt. Commun. 2017, 405, 228–232. [Google Scholar] [CrossRef]
- Mao, L.; Pu, S.; Su, D.; Wang, Z.; Zeng, X.; Lahoubi, M. Magnetic Field Sensor Based on Cascaded Microfiber Coupler with Magnetic Fluid. J. Appl. Phys. 2016, 120, 093102. [Google Scholar] [CrossRef]
- Wang, J.; Pei, L.; Wang, J.; Ruan, Z.; Zheng, J.; Li, J.; Ning, T. Magnetic Field and Temperature Dual-Parameter Sensor Based on Magnetic Fluid Materials Filled Photonic Crystal Fiber. Opt. Express 2020, 28, 1456. [Google Scholar] [CrossRef]
- Liang, H.; Liu, Y.; Li, H.; Han, S.; Zhang, H.; Wu, Y.; Wang, Z. Magnetic-Ionic-Liquid-Functionalized Photonic Crystal Fiber for Magnetic Field Detection. IEEE Photon. Technol. Lett. 2018, 30, 359–362. [Google Scholar] [CrossRef]
- Zhang, D.; Wei, H.; Hu, H.; Krishnaswamy, S. Highly Sensitive Magnetic Field Microsensor Based on Direct Laser Writing of Fiber-Tip Optofluidic Fabry–Pérot Cavity. APL Photonics 2020, 5, 076112. [Google Scholar] [CrossRef]
- Wang, W.; Miao, Y.; Zhang, H.; Yang, X. Magneto-Optical Fiber Sagnac Sensor Based on Silica Tube Filled with Magnetic Fluid. In Proceedings of the IEEE 2017 16th International Conference on Optical Communications and Networks (ICOCN), Wuzhen, China, 7–10 August 2017; pp. 1–3. [Google Scholar]
- Jia, Z.; Pu, S.; Rao, J.; Zhao, Y.; Li, Y.; Yao, T. Temperature Self-Compensative All-Fiber Magnetic Field Sensing Structure Based on No-Core Fiber Cascaded with Fiber Bragg Gratings. Opt. Lasers Eng. 2019, 119, 26–29. [Google Scholar] [CrossRef]
- Li, P.; Yan, H.; Xie, Z.; Li, Y.; Zhao, X. An Intensity-Modulated and Large Bandwidth Magnetic Field Sensor Based on a Tapered Fiber Bragg Grating. Opt. Laser Technol. 2020, 125, 105996. [Google Scholar] [CrossRef]
- Tao, Y.; Li, T.; Feng, W. Reflective Fiber-Optic Magnetic Field Sensor Based on a Magnetic-Fluid-Filled Capillary Probe Structure. Meas. Sci. Technol. 2021, 32, 095117. [Google Scholar] [CrossRef]
- Zhang, J.; Chen, F.; Wang, R.; Qiao, X.; Chen, H.; Zhang, X. Vector Magnetic Field Measurement Based on Magnetic Fluid and High-Order Cladding-Mode Bragg Grating. Opt. Laser Technol. 2021, 143, 107264. [Google Scholar] [CrossRef]
- Bao, W.; Qiao, X.; Rong, Q.; Chen, F. Fiber-Optic Vector Magnetometer Based on Magnetic Fluid and Fiber Bragg Grating Written on a Multi-Clad Fiber. IEEE Sens. J. 2018, 18, 7486–7491. [Google Scholar] [CrossRef]
- Liu, X.; Zhao, Y.; Lv, R.-Q.; Wang, Q. Enhancement of RI Sensitivity Through Bending a Tapered-SMF-Based Balloon-Like Interferometer. J. Light. Technol. 2016, 34, 3293–3299. [Google Scholar] [CrossRef]
- Wu, Y.; Pei, L.; Jin, W.; Jiang, Y.; Yang, Y.; Shen, Y.; Jian, S. Highly sensitive curvature sensor based on asymmetrical twin core fiber and multimode fiber. Opt. Laser Technol. 2017, 92, 74–79. [Google Scholar] [CrossRef]
- Kiiveri, P.; Kuusisto, M.; Koponen, J.; Kimmelma, O.; Aallos, V.; Harra, J.; Husu, H.; Kyllönen, P. Refractive index profiles and propagation losses in bent optical fibers. Opt. Eng. 2022, 61, 126106. [Google Scholar] [CrossRef]
- Wu, Y.; Meng, F.; Li, H.; Yan, G.; Zhu, L. Simultaneous Measurement of Micro-Displacement and Temperature Based on Balloon-like Interferometer and Fiber Bragg Grating. Optik 2019, 183, 875–880. [Google Scholar] [CrossRef]
- Al-Janabi, D.I.; Salman, A.M.; Al-Janabi, A. High-Sensitivity Balloon-like Thermometric Sensor Based on Bent Single-Mode Fiber. Meas. Sci. Technol. 2020, 31, 115106. [Google Scholar] [CrossRef]
- Azad, S.; Nikzad, A.R.; Parvizi, R.; Safdari, M.J. Evanescent Field-Modulated Magnetic Immune Sensor Based on Magnetic Fluid and 292 Polymer Fiber-optic. IEEE Sens. J. 2019, 19, 8971–8978. [Google Scholar] [CrossRef]
- Pu, S.; Chen, X.; Chen, Y.; Xu, Y.; Liao, W.; Chen, L.; Xia, Y. Fiber-Optic Evanescent Field Modulator Using a Magnetic Fluid as the Cladding. J. Appl. Phys. 2006, 99, 093516. [Google Scholar] [CrossRef]
- Li, B.; Chan, H.P.; Ahmmed, K.T.; He, L.; Zhu, S.; Wu, Q. High-Sensitivity Magnetic Sensor Based on the Evanescent Scattering by a Magnetorheological Film. Opt. Lett. 2020, 45, 6643. [Google Scholar] [CrossRef]
- Zhang, X.; Liu, B.; Zhang, H.; Wu, J.; Song, B.; Wang, C. A Magnetic Field Sensor Based on a Dual S-Tapered Multimode Fiber Interferometer. Meas. Sci. Technol. 2018, 29, 075103. [Google Scholar] [CrossRef]
- Yin, J.; Ruan, S.; Liu, T.; Jiang, J.; Wang, S.; Wei, H.; Yan, P. All-fiber-optic vector magnetometer based on nano-magnetic fluids filled double-clad photonic crystal fiber. Sens. Actuators B Chem. 2017, 238, 518–524. [Google Scholar] [CrossRef]
- Chen, Y.; Hu, Y.; Cheng, H.; Yan, F.; Lin, Q.; Chen, Y.; Wu, P.; Chen, L.; Liu, G.; Peng, G.; et al. Side-Polished Single-Mode-Multimode-Single-Mode Fiber Structure for the Vector Magnetic Field Sensing. J. Light. Technol. 2020, 38, 5837–5843. [Google Scholar] [CrossRef]
- Xu, R.; Niu, G.; Xue, Y.; Ke, C.; Deng, H.; Deng, S.; Chen, M.; Yuan, L. An All-Optical Vector Magnetic Field Sensor Based on Magnetic Fluid and Side-Polished Hollow-Core Optical Fiber. IEEE Sens. J. 2021, 21, 21410–21416. [Google Scholar] [CrossRef]
- Li, C.; Ning, T.; Wen, X.; Li, J.; Zhang, C.; Zhang, C. Magnetic field and temperature sensor based on a no-core fiber combined with a fiber Bragg grating. Opt. Laser Technol. 2015, 72, 104–107. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structures | Fabrication Method | Vector | Sensitivity | Ref. |
|---|---|---|---|---|
| Dual S-tapered multimode fiber | Spicing and tapering fibers | No | 0.11 dB/mT | [35] |
| SMF-PCF-SMF | Fill the air core of PCF with MF | No | 0.19 dB/mT | [19] |
| SMF-no core fiber (NCF)-SMF | Spicing NCF between two SMF | No | 1.28 dB/mT | [22] |
| Tapered fiber Bragg grating | Using the heating-pull method with H2 flame | No | 1.933 dB/mT | [23] |
| SMF-NCF-FCF-NCF structure | Spicing fibers | No | 1.20993 dB/mT | [24] |
| FBG | Inscribe FBG on fiber | Yes | 1.43 dB/mT | [25] |
| FBG | Inscribe FBG on fiber | Yes | 0.353 dB/mT | [26] |
| Ring-shaped structure | Bending fiber | Yes | 2.402 dB/mT | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, Q.; Zhu, L.; Zhao, N.; Yang, P.; Jiang, Z. 2D-Vector Magnetic Sensing Based on Ring-Shaped Fiber-Optic Structure Coated with Magnetic Fluid. Micromachines 2023, 14, 2140. https://doi.org/10.3390/mi14122140
Lin Q, Zhu L, Zhao N, Yang P, Jiang Z. 2D-Vector Magnetic Sensing Based on Ring-Shaped Fiber-Optic Structure Coated with Magnetic Fluid. Micromachines. 2023; 14(12):2140. https://doi.org/10.3390/mi14122140
Chicago/Turabian StyleLin, Qijing, Liangquan Zhu, Na Zhao, Ping Yang, and Zhuangde Jiang. 2023. "2D-Vector Magnetic Sensing Based on Ring-Shaped Fiber-Optic Structure Coated with Magnetic Fluid" Micromachines 14, no. 12: 2140. https://doi.org/10.3390/mi14122140