
Mechanical Response of MEMS Suspended Inductors under Shock Using the Transfer Matrix Method

Abstract
:1. Introduction
2. Modeling and Method
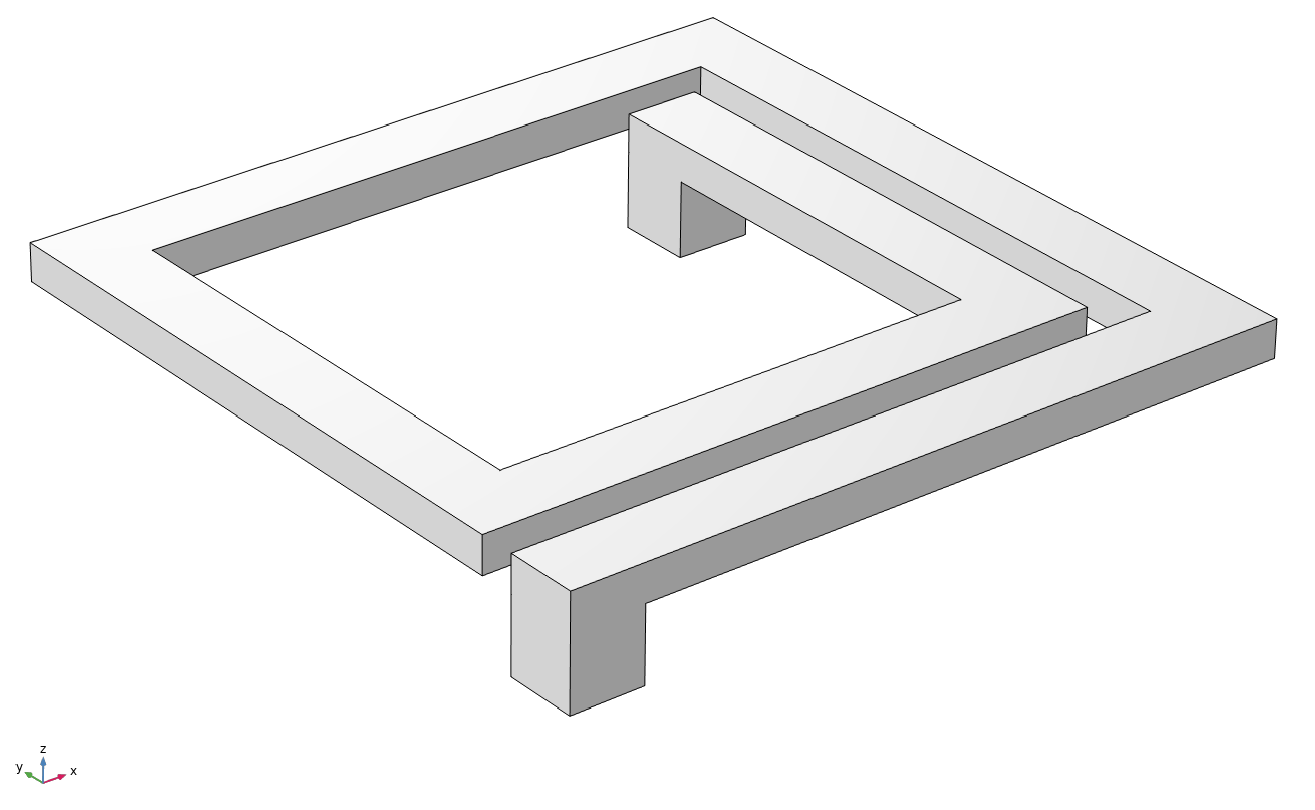
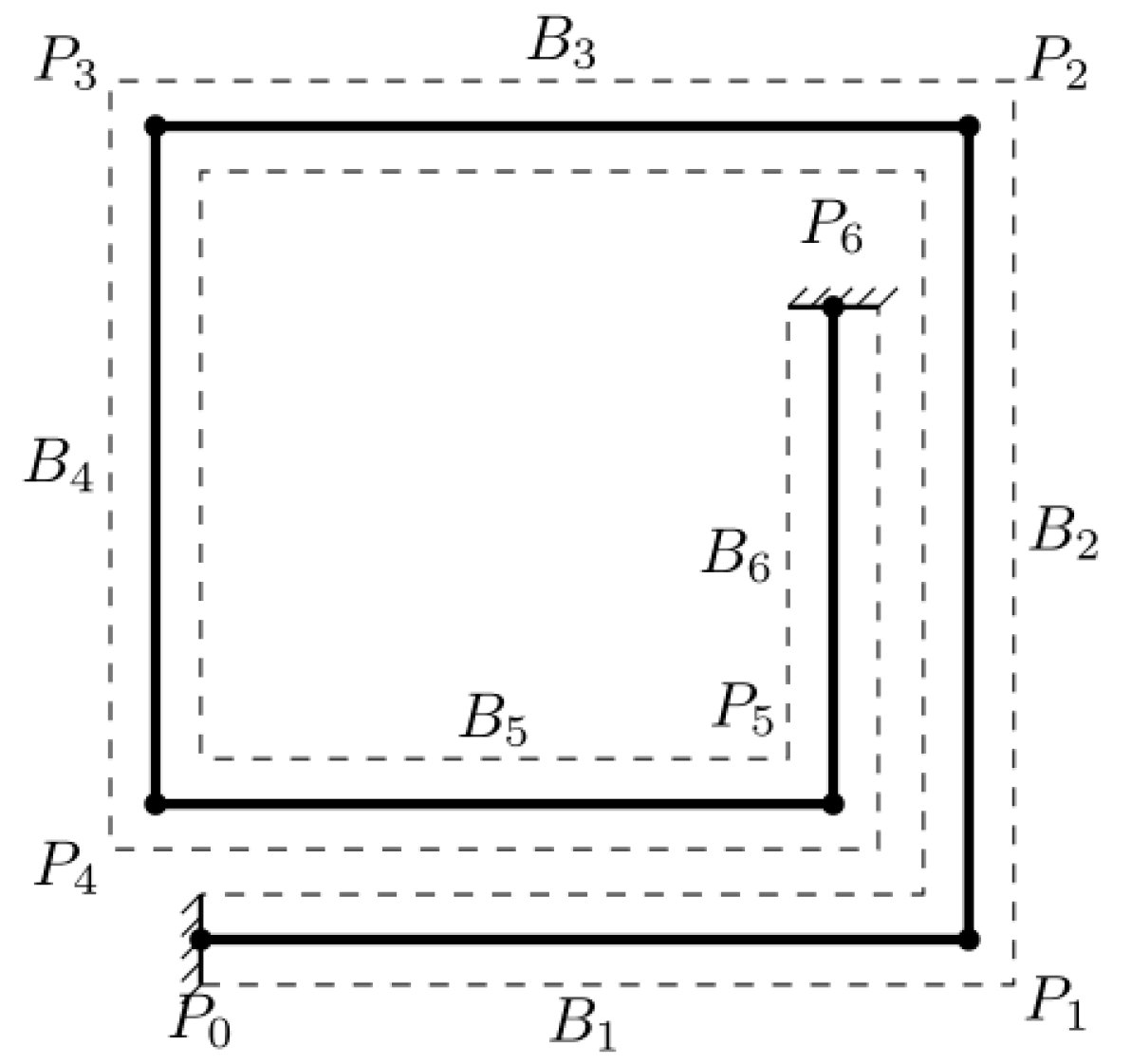
2.1. Simplification of the Structure of the Inductor
2.2. Free Vibration Characteristics of the Inductor
2.3. Dynamics Equation of the Inductor
2.4. Orthogonality of Eigenvectors
2.5. The Dynamic Response of the Inductor
2.6. The Maximum Z-Axis and Angular Displacements
2.7. The Maximum von Mises Stress
3. Results and Discussion
3.1. Natural Frequencies of the Inductor
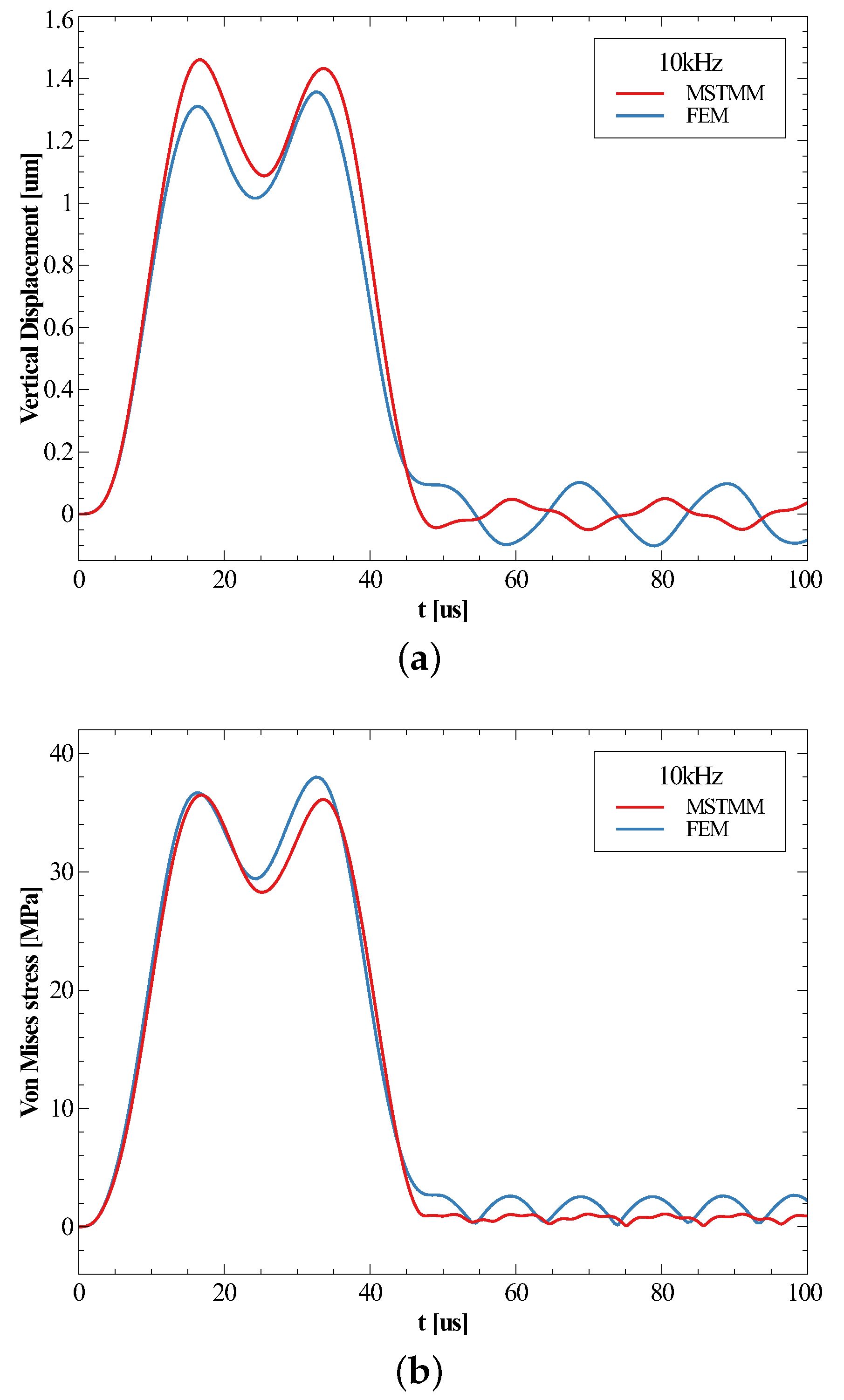
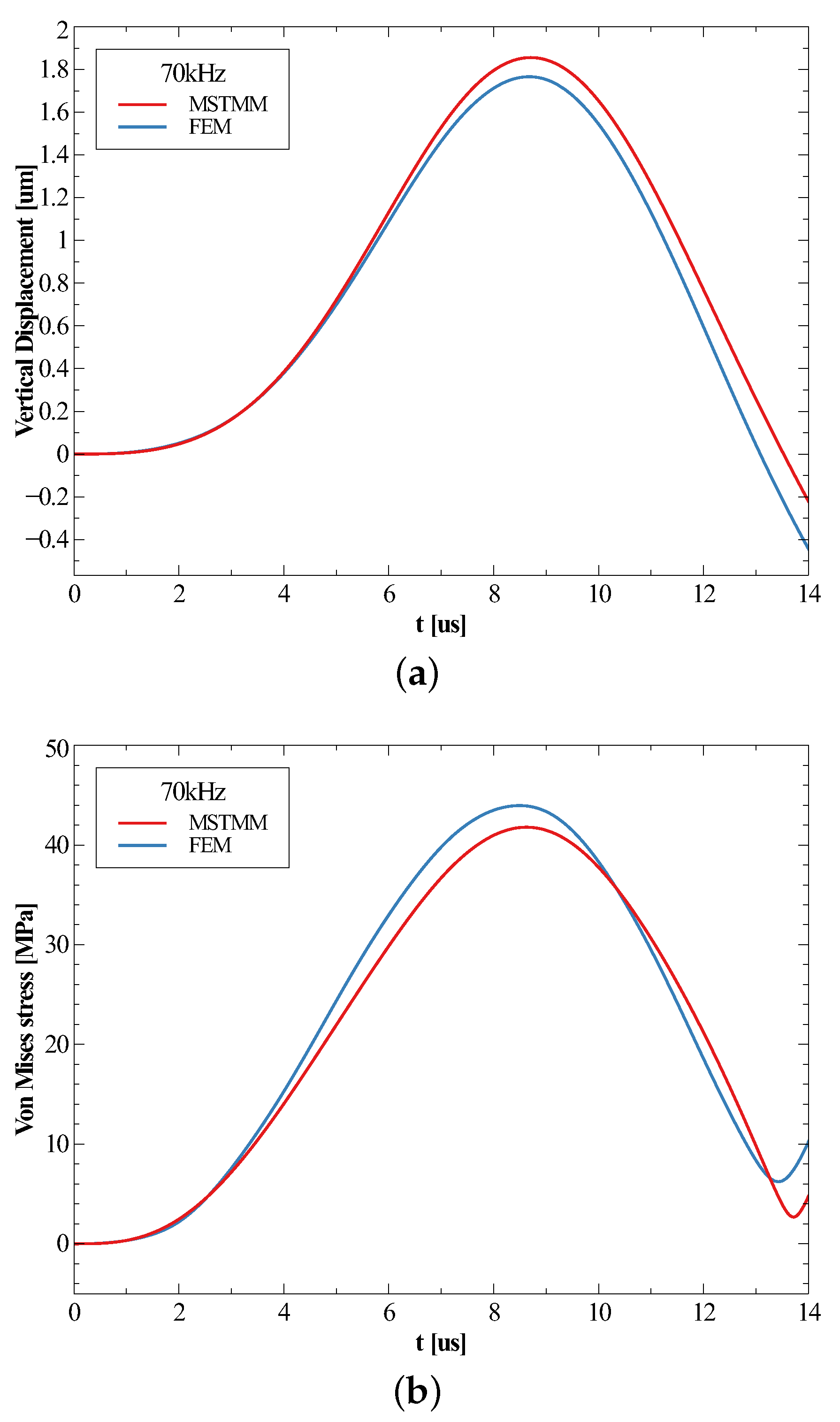
3.2. Responses of the Inductor under Shock
3.3. Effect of Shock Amplitude on Responses
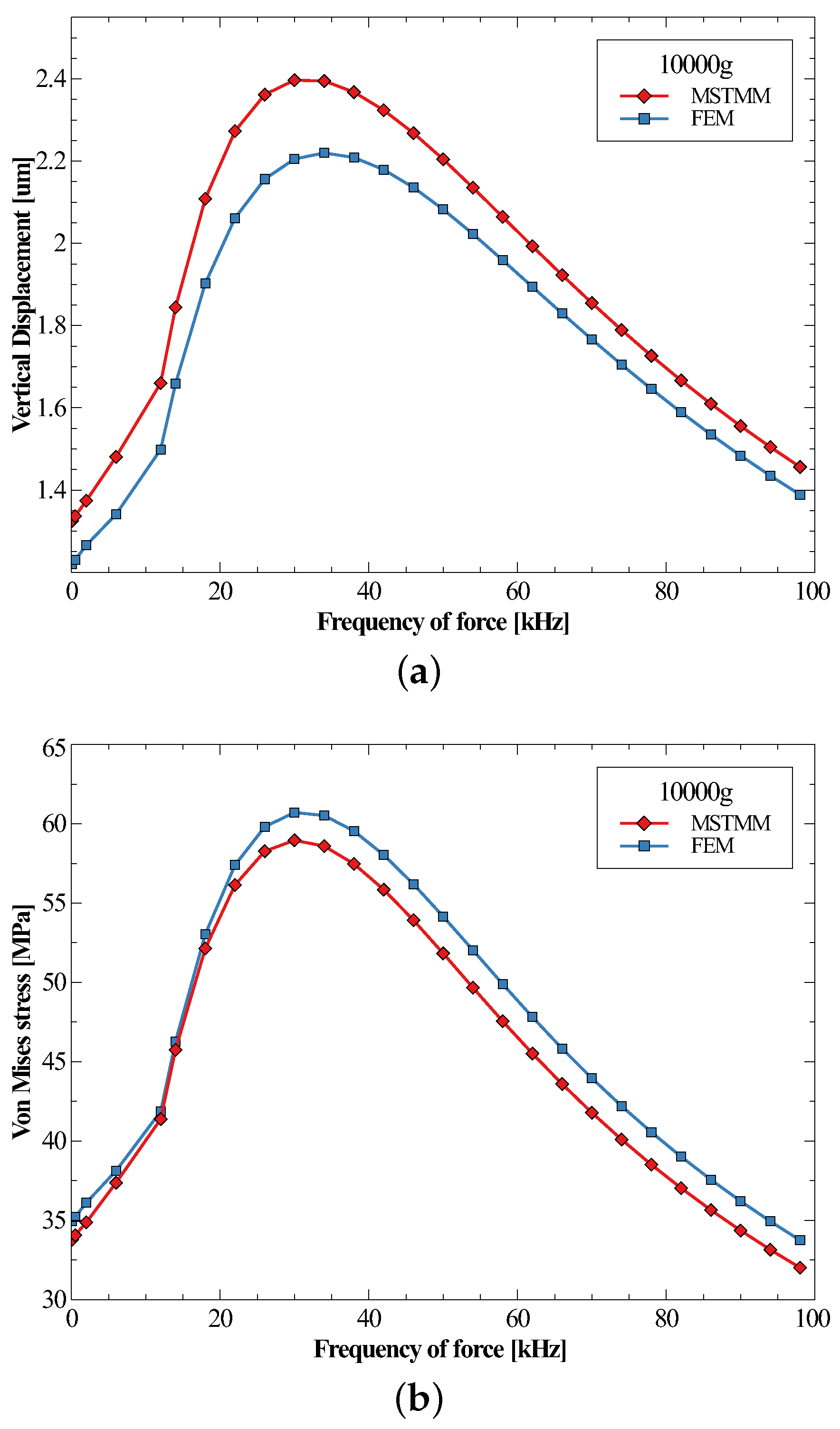
3.4. Effect of Shock Frequency on Responses
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- Hikmat, O.F.; Ali, M.S.M. RF MEMS Inductors and Their Applications—A Review. J. Microelectromech. Syst. 2016, 26, 17–44. [Google Scholar] [CrossRef]
- Ribas, R.P.; Lescot, J.; Leclercq, J.L.; Karam, J.M.; Ndagijimana, F. Micromachined Microwave Planar Spiral Inductors and Transformers. IEEE Trans. Microw. Theory Tech. 2000, 48, 1326–1335. [Google Scholar] [CrossRef]
- Yoon, J.B.; Choi, Y.S.; Kim, B.I.; Eo, Y.; Yoon, E. CMOS-compatible Surface-Micromachined Suspended-Spiral Inductors for Multi-GHz Silicon RF ICs. IEEE Electron Device Lett. 2002, 23, 591–593. [Google Scholar] [CrossRef]
- Wang, X.N.; Zhao, X.L.; Zhou, Y.; Dai, X.H.; Cai, B.C. Fabrication and Performance of a Novel Suspended RF Spiral Inductor. IEEE Trans. Electron Devices 2004, 51, 814–816. [Google Scholar] [CrossRef]
- Lin, J.W.; Chen, C.; Cheng, Y.T. A Robust High-Q Micromachined RF Inductor for RFIC Applications. IEEE Trans. Electron Devices 2005, 52, 1489–1496. [Google Scholar] [CrossRef]
- Hsieh, M.C.; Jair, D.K.; Lin, C.S. Design and Fabrication of the Suspended High-Q Spiral Inductors with X-beams. Microsyst. Technol. 2008, 14, 903–907. [Google Scholar] [CrossRef]
- Brown, T.G.; Davis, B.; Hepner, D.; Faust, J.; Myers, C.; Muller, C.; Harkins, T.; Holis, M.; Placzankis, B. Strap-down Microelectromechanical (MEMS) Sensors for High-g Munition Applications. IEEE Trans. Magn. 2001, 37, 336–342. [Google Scholar] [CrossRef]
- Hartzell, A.L.; Da Silva, M.G.; Shea, H.R. MEMS Reliability; MEMS Reference Shelf; Springer: New York, NY, USA, 2011; pp. 90–91. [Google Scholar]
- Dahlmann, G.; Yeatman, E.; Young, P.; Robertson, I.; Lucyszyn, S. Fabrication, RF Characteristics and Mechanical Stability of Self-Assembled 3D Microwave Inductors. Sens. Actuators Phys. 2002, 97–98, 215–220. [Google Scholar] [CrossRef]
- Lian, J.; Li, J.; Xu, L. The Effect of Displacement Constraints on the Failure of MEMS Tuning Fork Gyroscopes under Shock Impact. Micromachines 2019, 10, 343. [Google Scholar] [CrossRef]
- Peng, T.; You, Z. Reliability of MEMS in Shock Environments: 2000–2020. Micromachines 2021, 12, 1275. [Google Scholar] [CrossRef]
- Jiang, H.R.; Wang, Y.; Yeh, J.L.A.; Tien, N.C. On-Chip Spiral Inductors Suspended over Deep Copper-Lined Cavities. IEEE Trans. Microw. Theory Tech. 2000, 48, 2415–2423. [Google Scholar] [CrossRef]
- Srikar, V.T.; Senturia, S.D. The Reliability of Microelectromechanical Systems (MEMS) in Shock Environments. J. Microelectromech. Syst. 2002, 11, 206–214. [Google Scholar] [CrossRef]
- Xu, K.; Zhu, N.; Jiang, F.; Zhang, W.; Hao, Y. A Transfer Function Approach to Shock Duration Compensation for Laboratory Evaluation of Ultra-High-G Vacuum-Packaged MEMS Accelerometers. In Proceedings of the 2019 IEEE 32nd International Conference on Micro Electro Mechanical Systems (MEMS), Seoul, Republic of Korea, 27–31 January 2019; pp. 676–679. [Google Scholar] [CrossRef]
- Peng, T.; You, Z. An Analytical Model of Transient Response of MEMS under High-G Shock for Reliability Assessment. In Proceedings of the 2022 IEEE International Reliability Physics Symposium (IRPS), Dallas, TX, USA, 27–31 March 2022; pp. P41-1–P41-5. [Google Scholar] [CrossRef]
- Wang, J.; Lou, W.; Wang, D.; Feng, H. Design, Analysis, and Fabrication of Silicon-Based MEMS Gyroscope for High-g Shock Platform. Microsyst. Technol. 2019, 25, 4577–4586. [Google Scholar] [CrossRef]
- Lian, J.; Li, Y.; Tang, Y.; Li, J.; Xu, L. Analysis of the Vulnerability of MEMS Tuning Fork Gyroscope during the Gun Launch. Microelectron. Reliab. 2020, 107, 113619. [Google Scholar] [CrossRef]
- Fathalilou, M.; Soltani, K.; Rezazadeh, G.; Cigeroglu, E. Enhancement of the Reliability of MEMS Shock Sensors by Adopting a Dual-Mass Model. Measurement 2020, 153, 107428. [Google Scholar] [CrossRef]
- Fang, X.Y.; Hu, K.M.; Yan, G.; Wu, Z.Y.; Wu, J.H.; Zhang, W.M. Shock Destructive Reliability Analysis of Electromagnetic MEMS Micromirror for Automotive LiDAR. J. Microelectromech. Syst. 2022, 31, 134–142. [Google Scholar] [CrossRef]
- Singh, V.; Kumar, V.; Saini, A.; Khosla, P.K.; Mishra, S. Response Analysis of MEMS Based High-g Acceleration Threshold Switch under Mechanical Shock. Int. J. Mech. Mater. Des. 2021, 17, 137–151. [Google Scholar] [CrossRef]
- Sundaram, S.; Tormen, M.; Timotijevic, B.; Lockhart, R.; Overstolz, T.; Stanley, R.P.; Shea, H.R. Vibration and Shock Reliability of MEMS: Modeling and Experimental Validation. J. Micromech. Microeng. 2011, 21, 045022. [Google Scholar] [CrossRef]
- Li, Y.; Li, J.; Xu, L. Failure Mode Analysis of MEMS Suspended Inductors under Mechanical Shock. Microelectron. Reliab. 2018, 85, 38–48. [Google Scholar] [CrossRef]
- Xu, L.; Li, Y.; Li, J.; Lu, C. Mechanical Response of MEMS Inductor with Auxiliary Pillar under High-g Shock. Micromachines 2018, 9, 176. [Google Scholar] [CrossRef]
- Xu, L.; Li, Y.; Li, J. Analysis of the Failure and Performance Variation Mechanism of MEMS Suspended Inductors with Auxiliary Pillars under High-g Shock. Micromachines 2020, 11, 957. [Google Scholar] [CrossRef] [PubMed]
- Younis, M.I.; Jordy, D.; Pitarresi, J.M. Computationally Efficient Approaches to Characterize the Dynamic Response of Microstructures Under Mechanical Shock. J. Microelectromech. Syst. 2007, 16, 628–638. [Google Scholar] [CrossRef]
- Fang, X.; Tang, J.; Huang, Q.A. Analysis of Micromachined Cantilevers in Transverse Shock. J. Semicond. 2005, 26, 379–384. [Google Scholar]
- Hsu, T.R. MEMS and Microsystems: Design, Manufacture, and Nanoscale Engineering, 2nd ed.; John Wiley & Sons.: Hoboken, NJ, USA, 2008; pp. 128–130. [Google Scholar]
- Peng, T.; You, Z. The Optimal Shape of MEMS Beam Under High-G Shock Based on a Probabilistic Fracture Model. In Proceedings of the 2022 IEEE International Reliability Physics Symposium (IRPS), Dallas, TX, USA, 27–31 March 2022; pp. P42-1–P42-5. [Google Scholar] [CrossRef]
- Rui, X.T.; Wang, G.; Lu, Y.; Yun, L. Transfer Matrix Method for Linear Multibody System. Multibody Syst. Dyn. 2008, 19, 179–207. [Google Scholar] [CrossRef]
- Rui, X.; Bestle, D.; Zhang, J.; Zhou, Q. A New Version of Transfer Matrix Method for Multibody Systems. Multibody Syst. Dyn. 2016, 38, 137–156. [Google Scholar] [CrossRef]
- Rui, X.; Wang, G.; Zhang, J. Transfer Matrix Method for Multibody Systems: Theory and Applications; John Wiley & Sons.: Hoboken, NJ, USA, 2017. [Google Scholar] [CrossRef]
- Zhang, T.; Zhang, J.; Hu, J. Dynamic Model and Simulation of Aseismatic System about Laser Gyro Strapdown Inertial Measure Assembly Based on MSTMM. J. Syst. Eng. Electron. 2012, 23, 741–751. [Google Scholar] [CrossRef]
- Zhu, W.; Chen, G.; Bian, L.; Rui, X. Transfer Matrix Method for Multibody Systems for Piezoelectric Stack Actuators. Smart Mater. Struct. 2014, 23, 095043. [Google Scholar] [CrossRef]
- Abbas, L.K.; Zhou, Q.; Hendy, H.; Rui, X. Transfer Matrix Method for Determination of the Natural Vibration Characteristics of Elastically Coupled Launch Vehicle Boosters. Acta Mech. Sin. 2015, 31, 570–580. [Google Scholar] [CrossRef]
- Tang, W.; Rui, X.; Yang, F.; Liu, F. Study on the Vibration Characteristics of a Complex Multiple Launch Rocket System. In ACSR-Advances in Comptuer Science Research, Proceedings of the 6th International Conference on Electronic, Mechanical, Information and Management Society (Emim); Jing, W., Guiran, C., Huiyu, Z., Eds.; Atlantis Press: Amsterdam, The Netherlands, 2016; Volume 40, pp. 360–365. [Google Scholar]
- Chen, G.; Rui, X.; Yang, F.; Zhang, J.; Zhou, Q. Study on the Dynamics of Laser Gyro Strapdown Inertial Measurement Unit System Based on Transfer Matrix Method for Multibody System. Adv. Mech. Eng. 2015, 5, 854583. [Google Scholar] [CrossRef]
- Chen, Y.; Guo, L.; Yang, S. Mixed-Potential Integral Equation Based Characteristic Mode Analysis of Microstrip Antennas. Int. J. Antennas Propag. 2016, 2016, 9421050. [Google Scholar] [CrossRef]
- Cazzorla, A.; Farinelli, P.; Urbani, L.; Sorrentino, R.; Margesin, B. MEMS-based LC Tank with Extended Tuning Range for Multiband Applications. Radio Sci. 2016, 51, 1519–1532. [Google Scholar] [CrossRef]
- Harris, C.; Piersol, A. Harris’ Shock and Vibration Handbook, 5th ed.; McGraw-Hill: New York, NY, USA, 2002. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode | MSTMM | FEM | Relative Deviation |
|---|---|---|---|
| 1 | 49.57 | 51.01 | 2.8% |
| 2 | 72.70 | 71.85 | 1.1% |
| 3 | 139.72 | 133.19 | 4.9% |
| Corner | MSTMM | FEM | Relative Deviation |
|---|---|---|---|
| P1 | 26.7 | 26.3 | 4.0% |
| P2 | 10.6 | 12.6 | 11.8% |
| P3 | 14.0 | 17.7 | 20.8% |
| P4 | 27.4 | 31.0 | 15.9% |
| P5 | 36.5 | 38.0 | 1.7% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, T.; Xu, L. Mechanical Response of MEMS Suspended Inductors under Shock Using the Transfer Matrix Method. Micromachines 2023, 14, 1187. https://doi.org/10.3390/mi14061187
Zheng T, Xu L. Mechanical Response of MEMS Suspended Inductors under Shock Using the Transfer Matrix Method. Micromachines. 2023; 14(6):1187. https://doi.org/10.3390/mi14061187
Chicago/Turabian StyleZheng, Tianxiang, and Lixin Xu. 2023. "Mechanical Response of MEMS Suspended Inductors under Shock Using the Transfer Matrix Method" Micromachines 14, no. 6: 1187. https://doi.org/10.3390/mi14061187