
MPC-ESO Position Control Strategy for a Miniature Double-Cylinder Actuator Considering Hose Effects

Abstract
:1. Introduction
2. Arrangement and Model
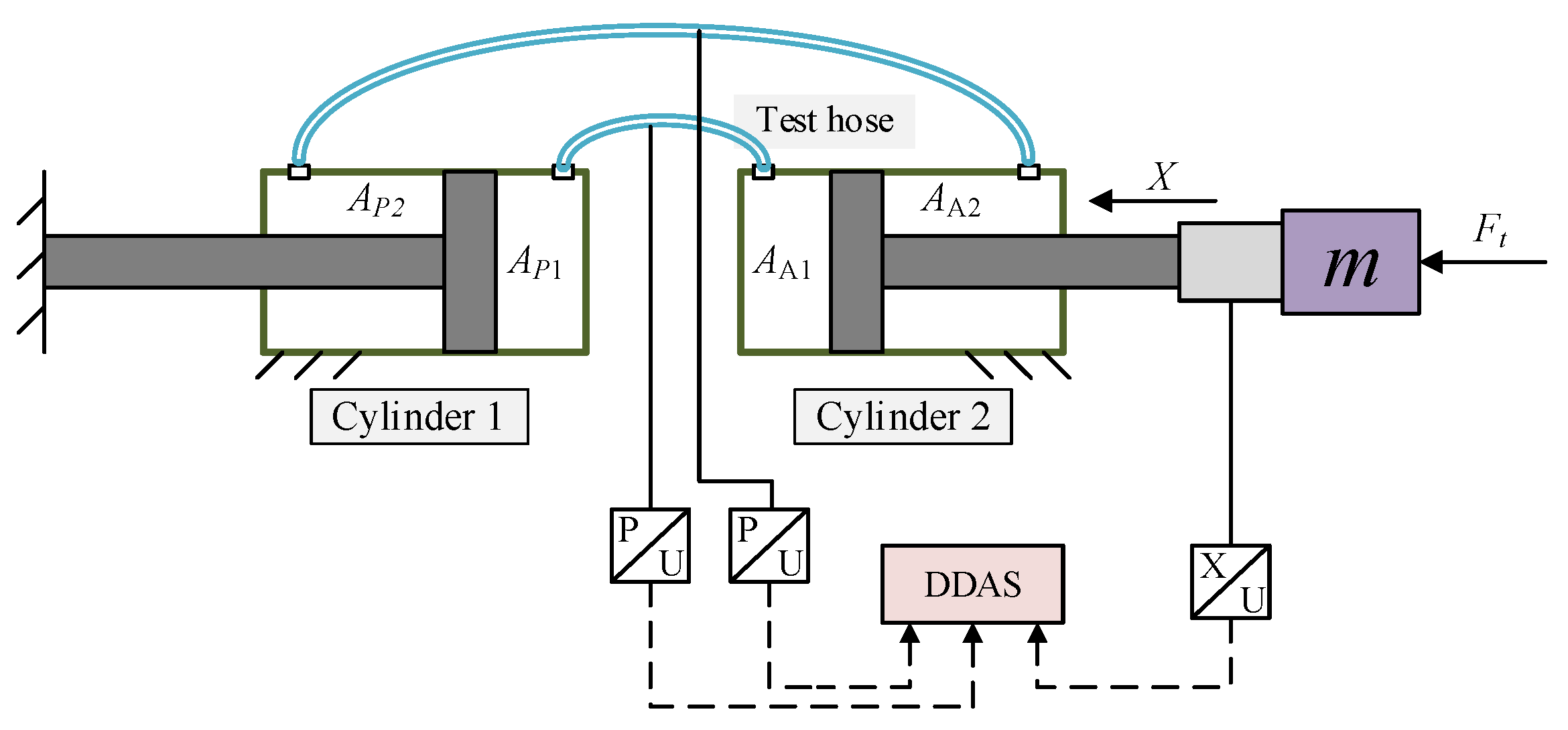
2.1. System Arrangement
2.2. System Mathematical Model
3. Principle and Hose Modeling
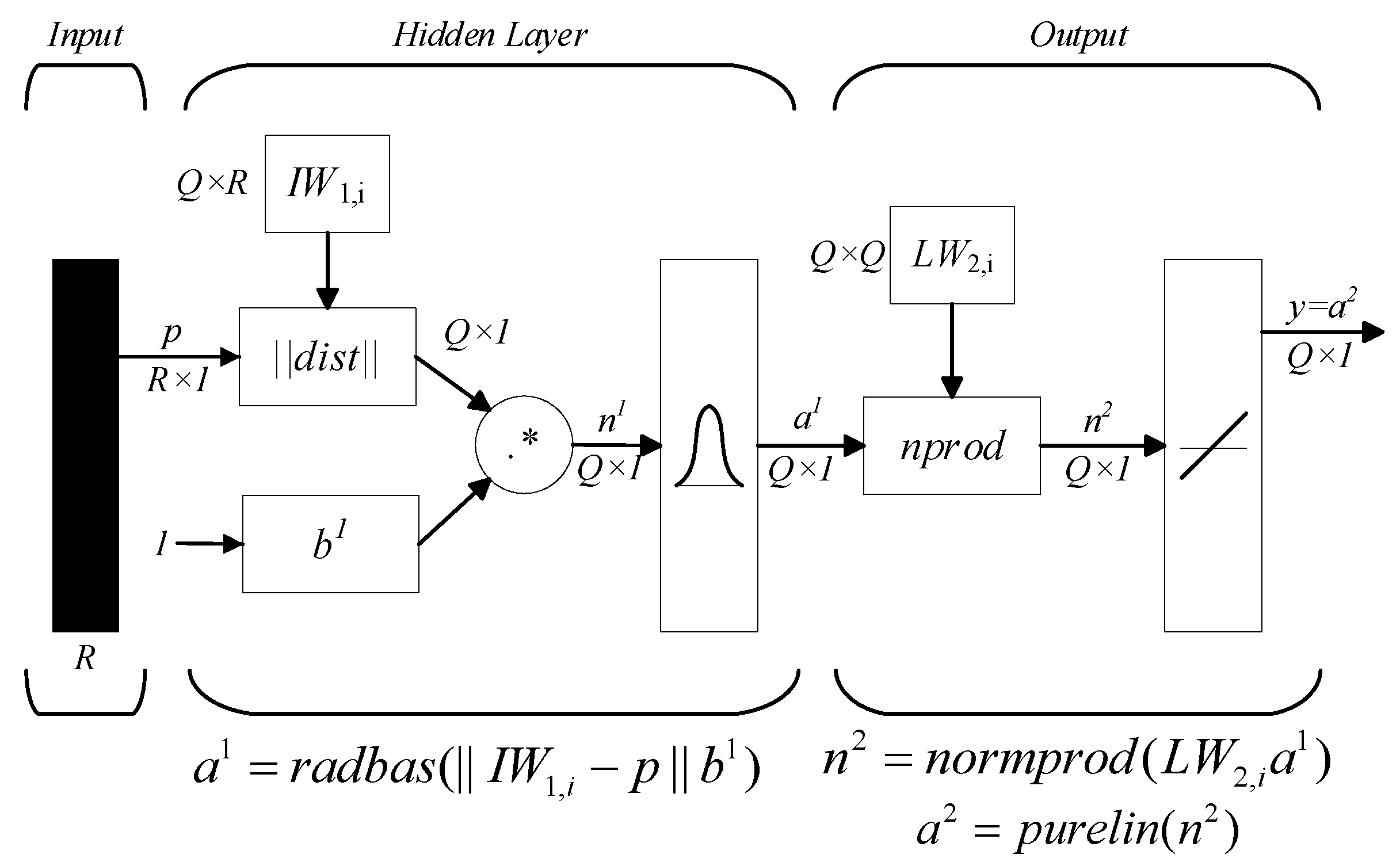
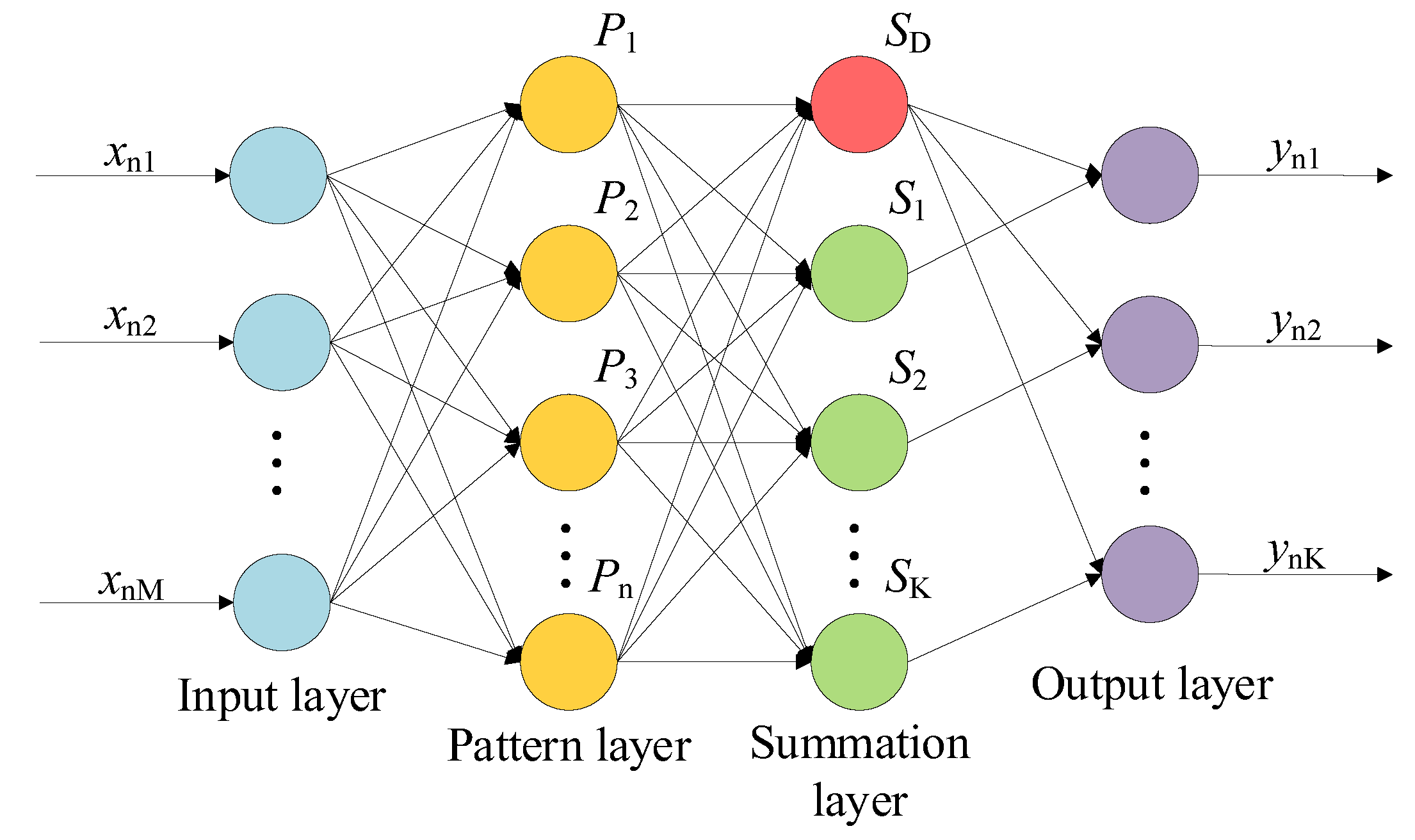
3.1. GRNN Structure and Principle
- Input layer
- 2.
- Pattern layer
- 3.
- Summation layer
- 4.
- Output layer
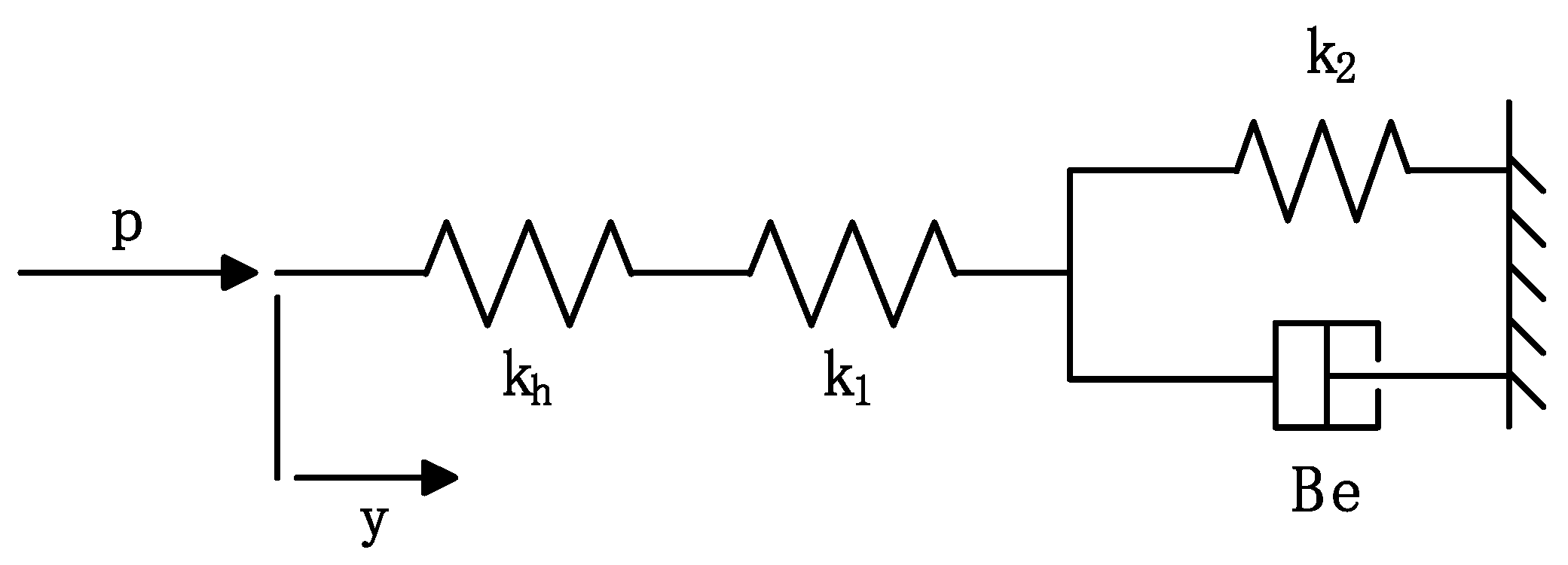
3.2. Hose Model
4. Design of Generalized MPC
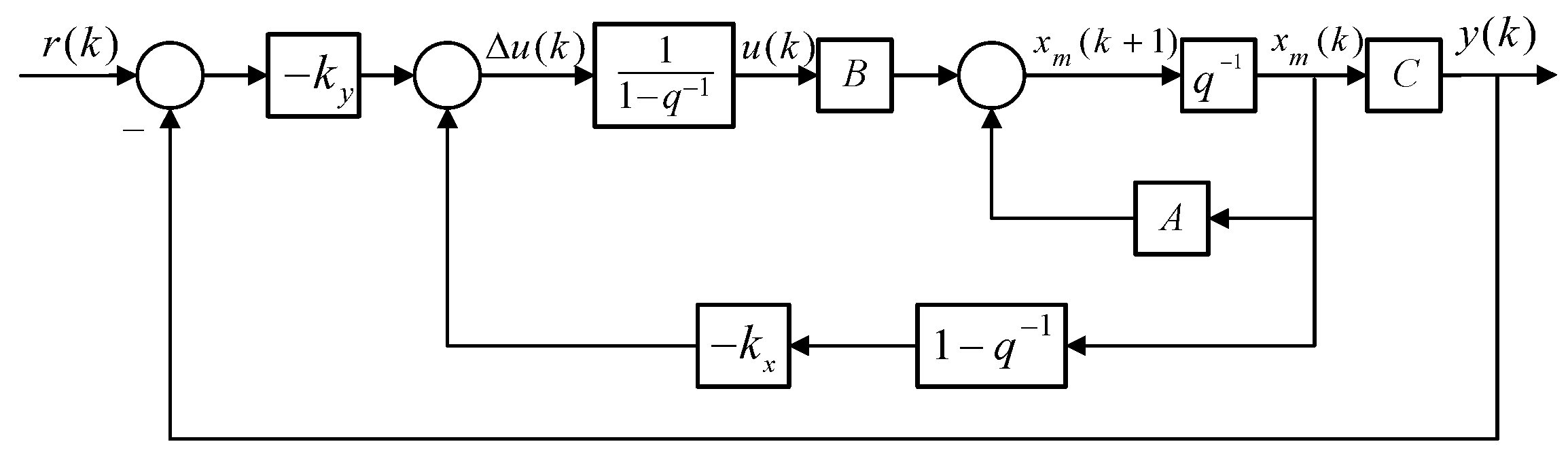
4.1. Control Structure
4.2. Design of Augmented State-Space MPC
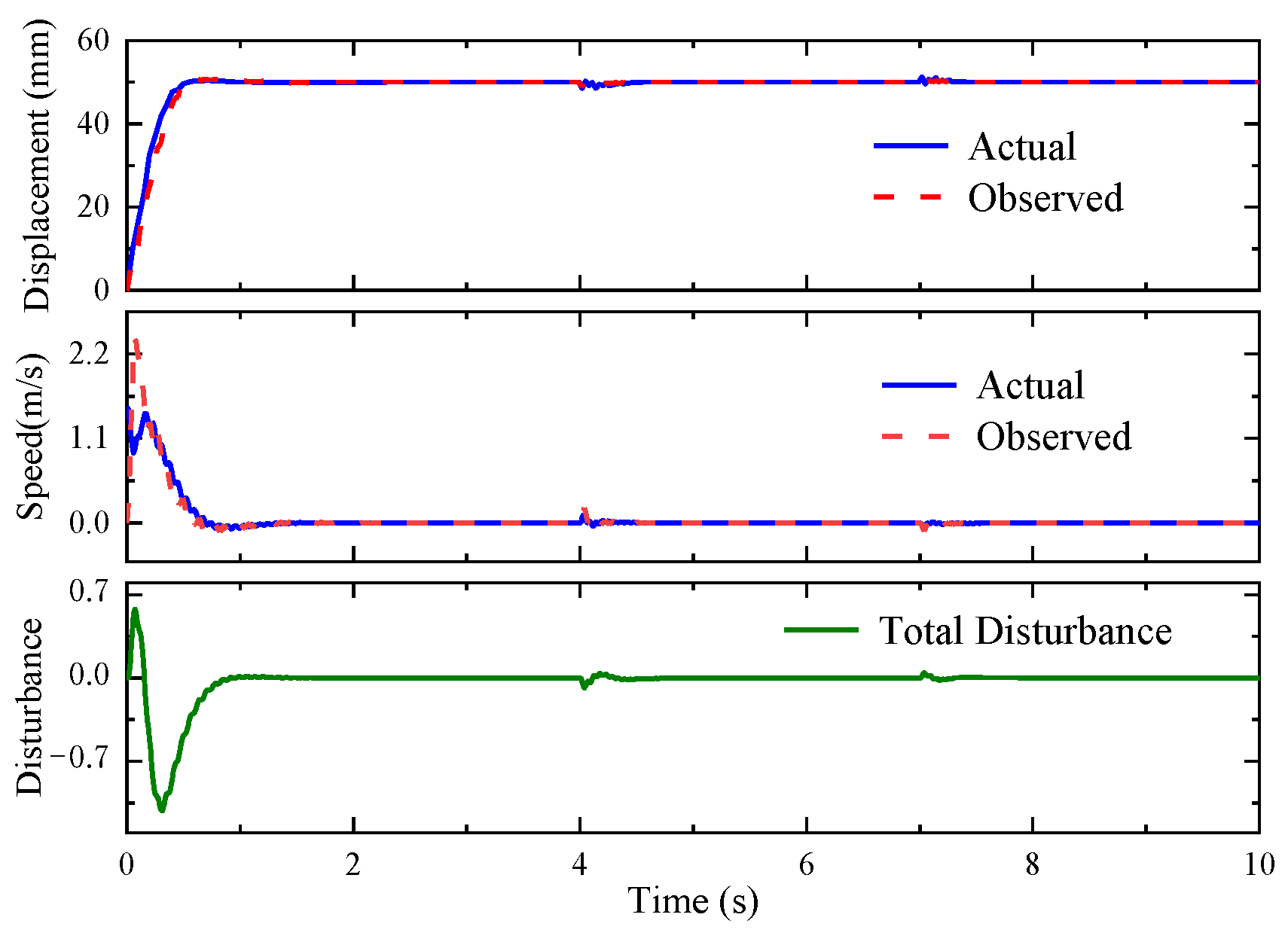
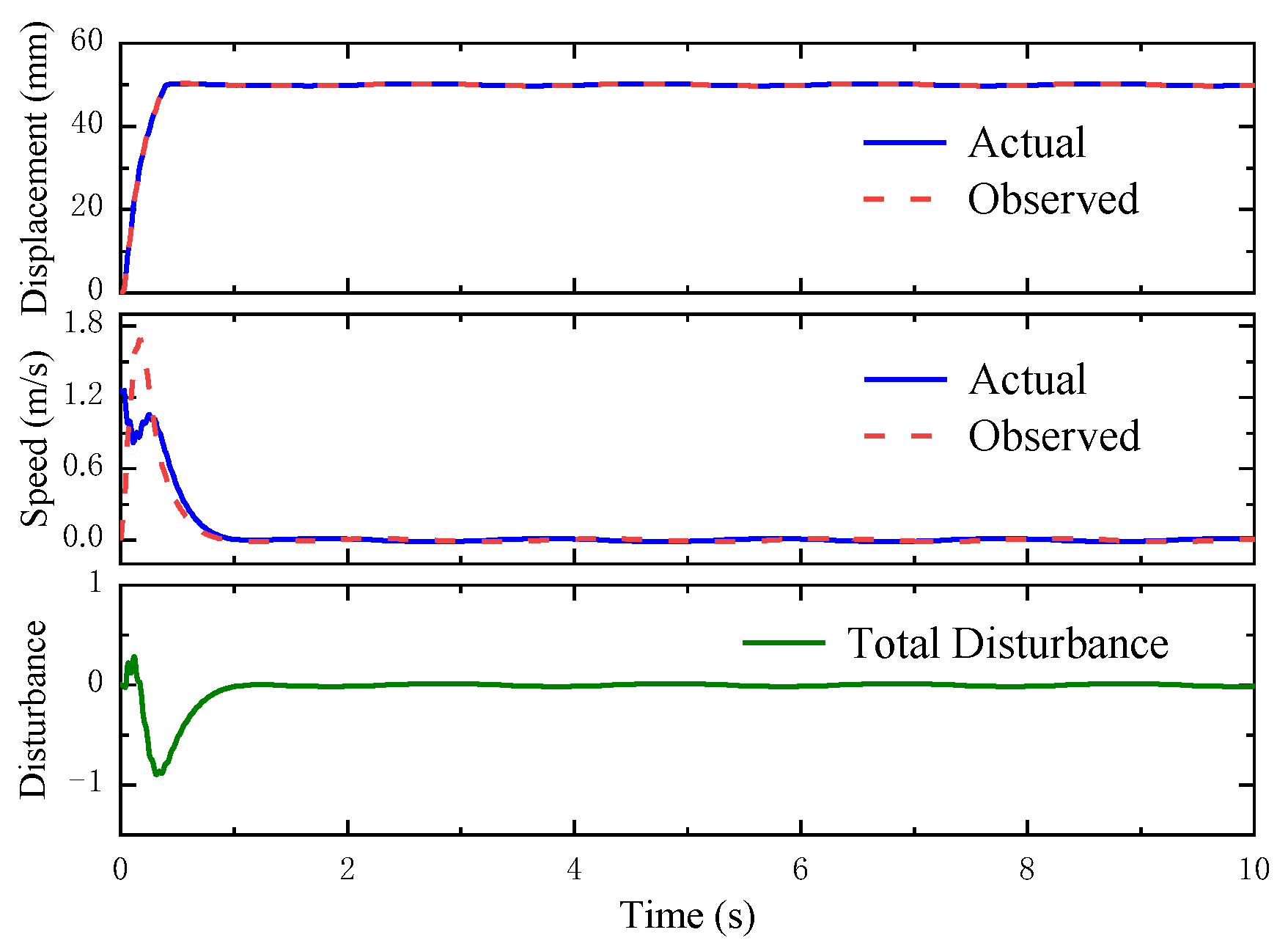
4.3. Design of ESO
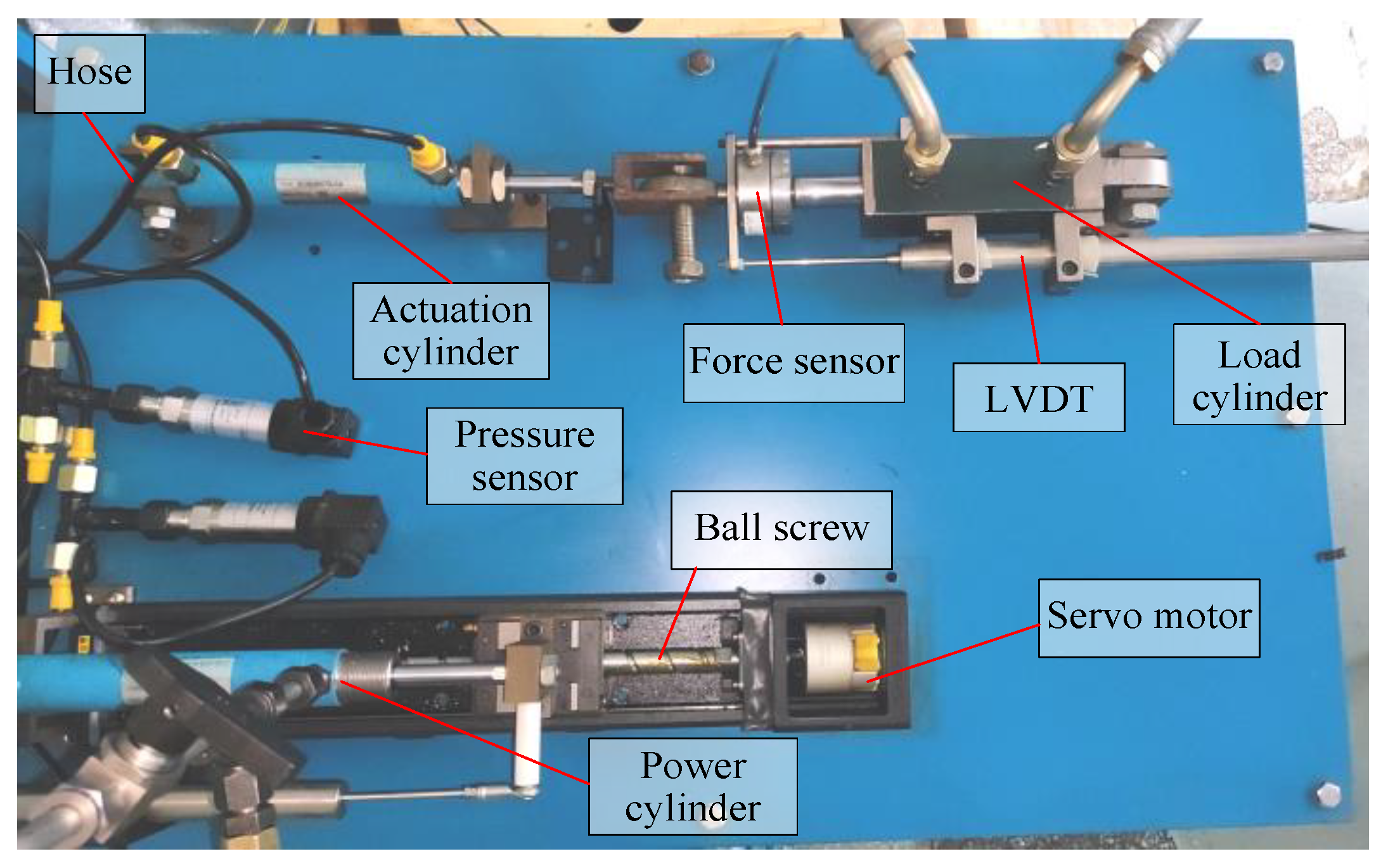
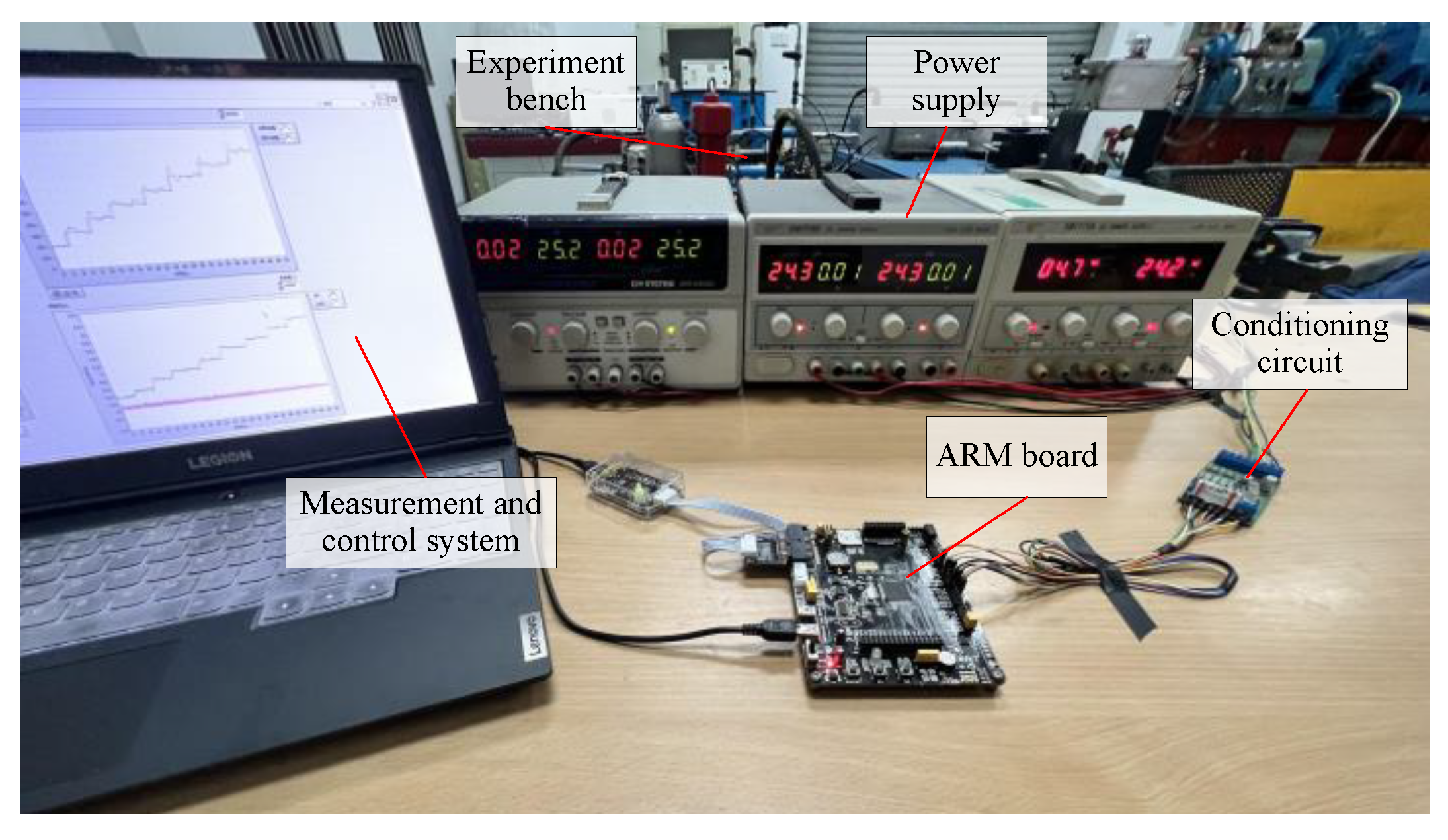
5. Experimental System
Double-Cylinder Experimental Bench
6. Results
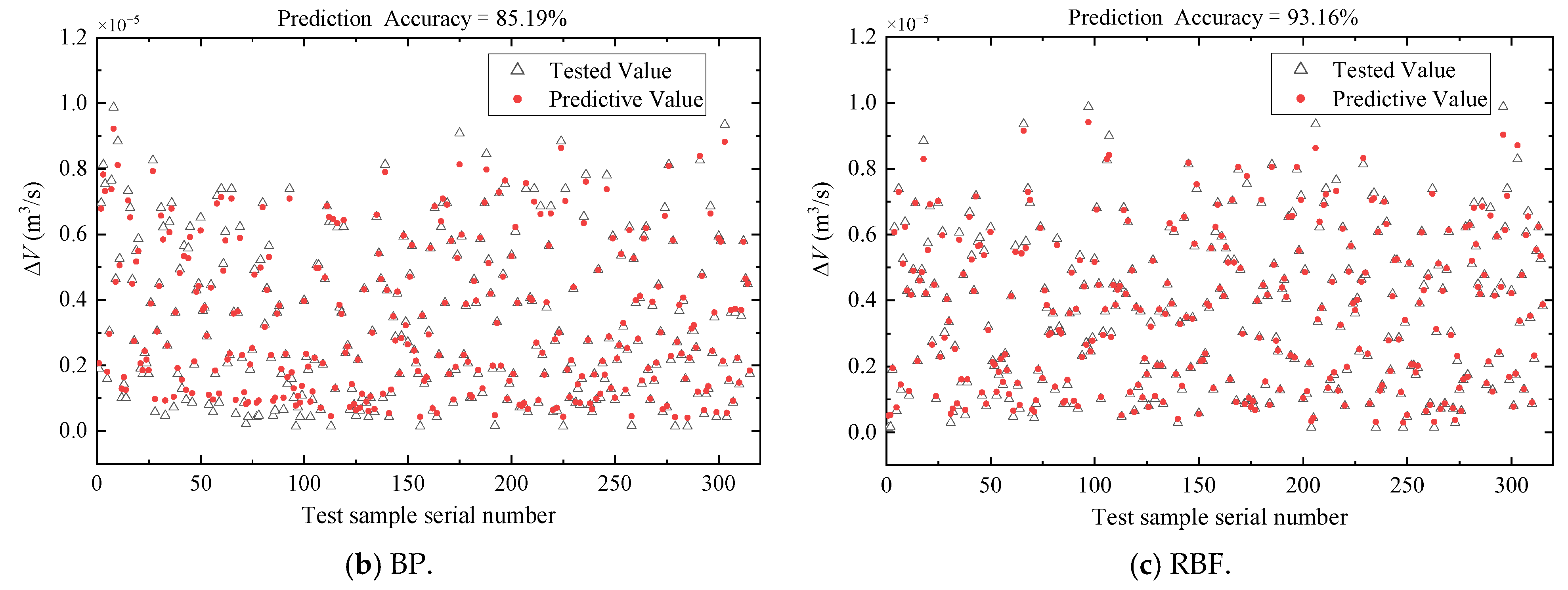
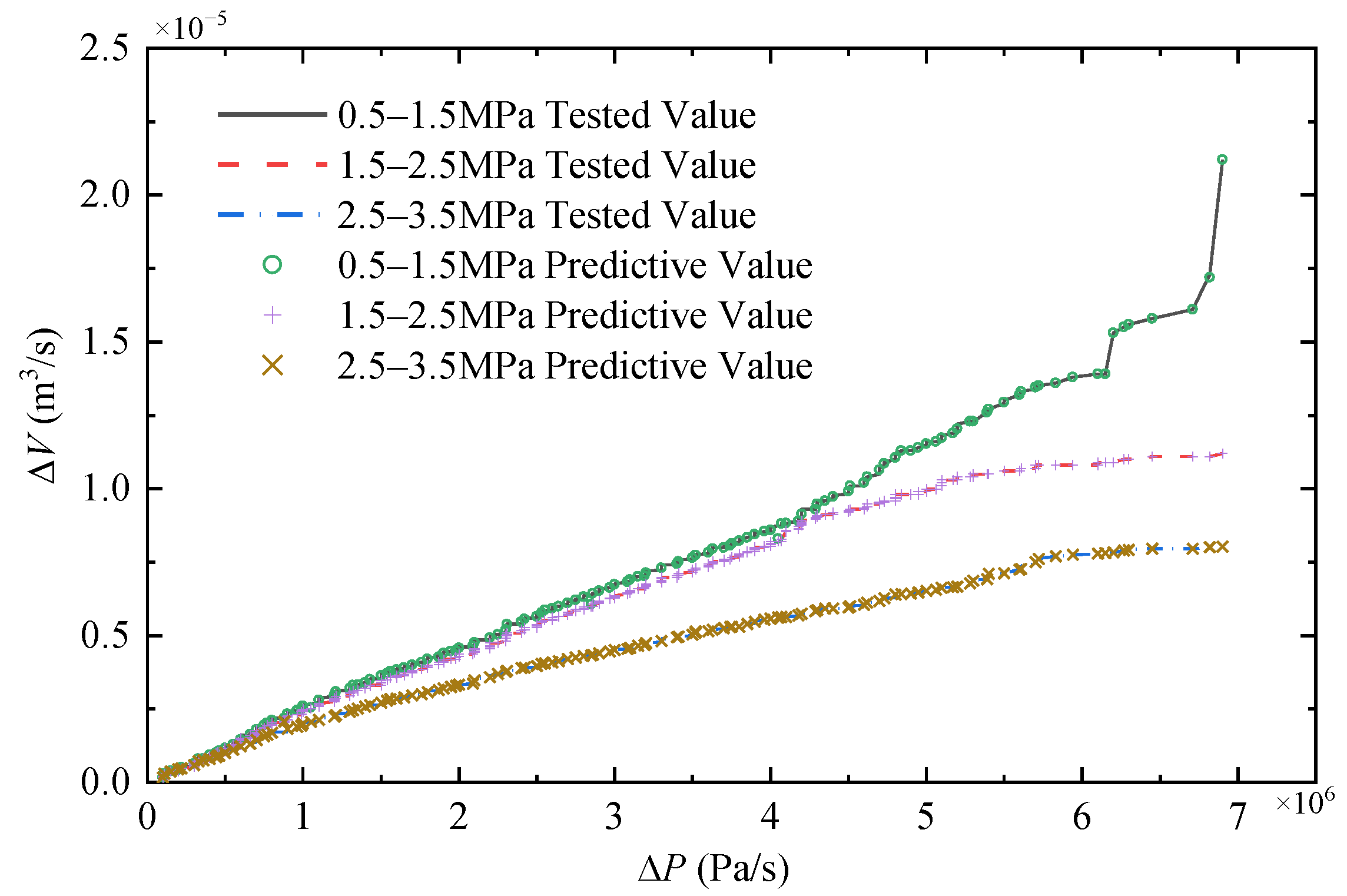
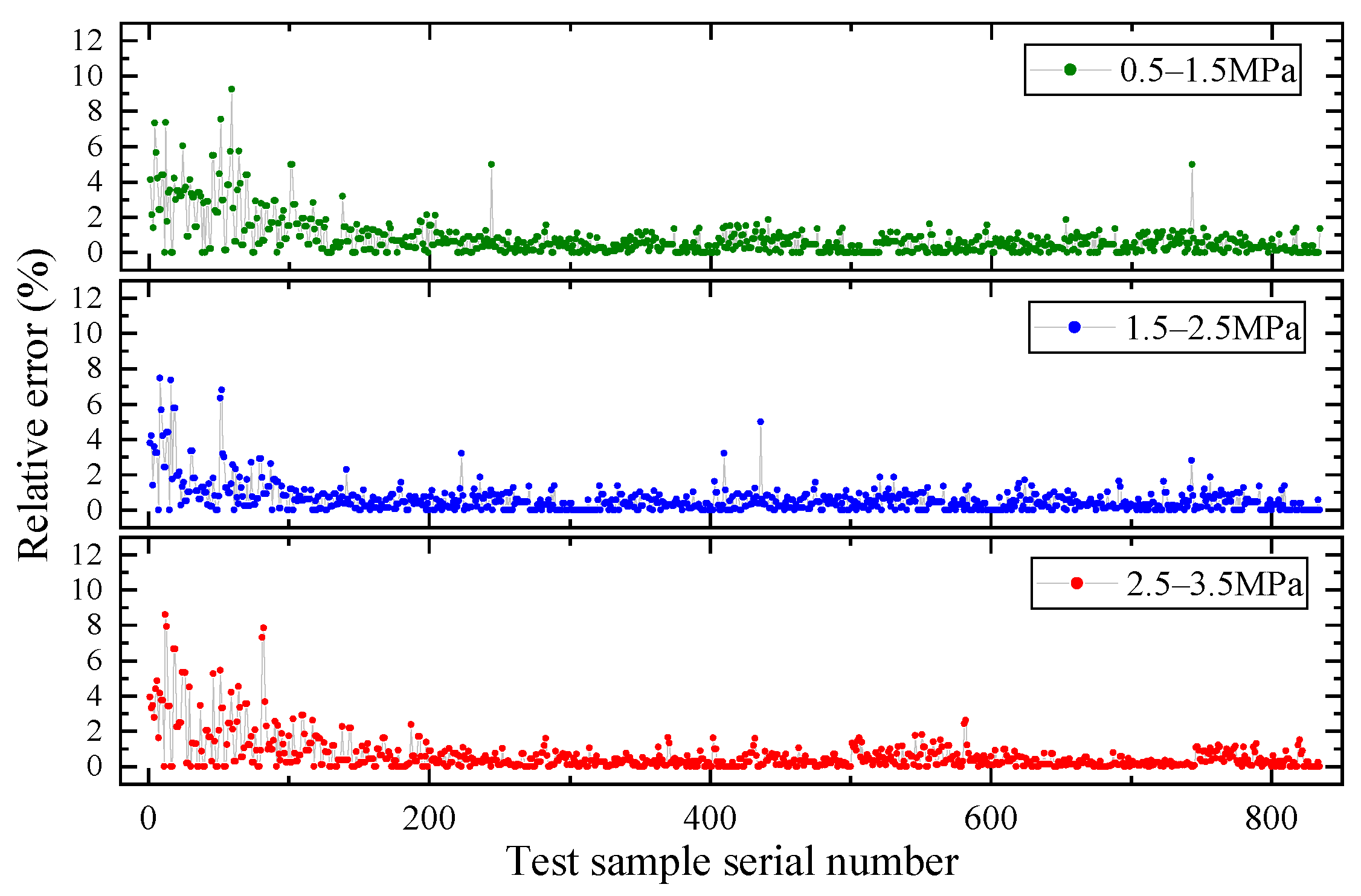
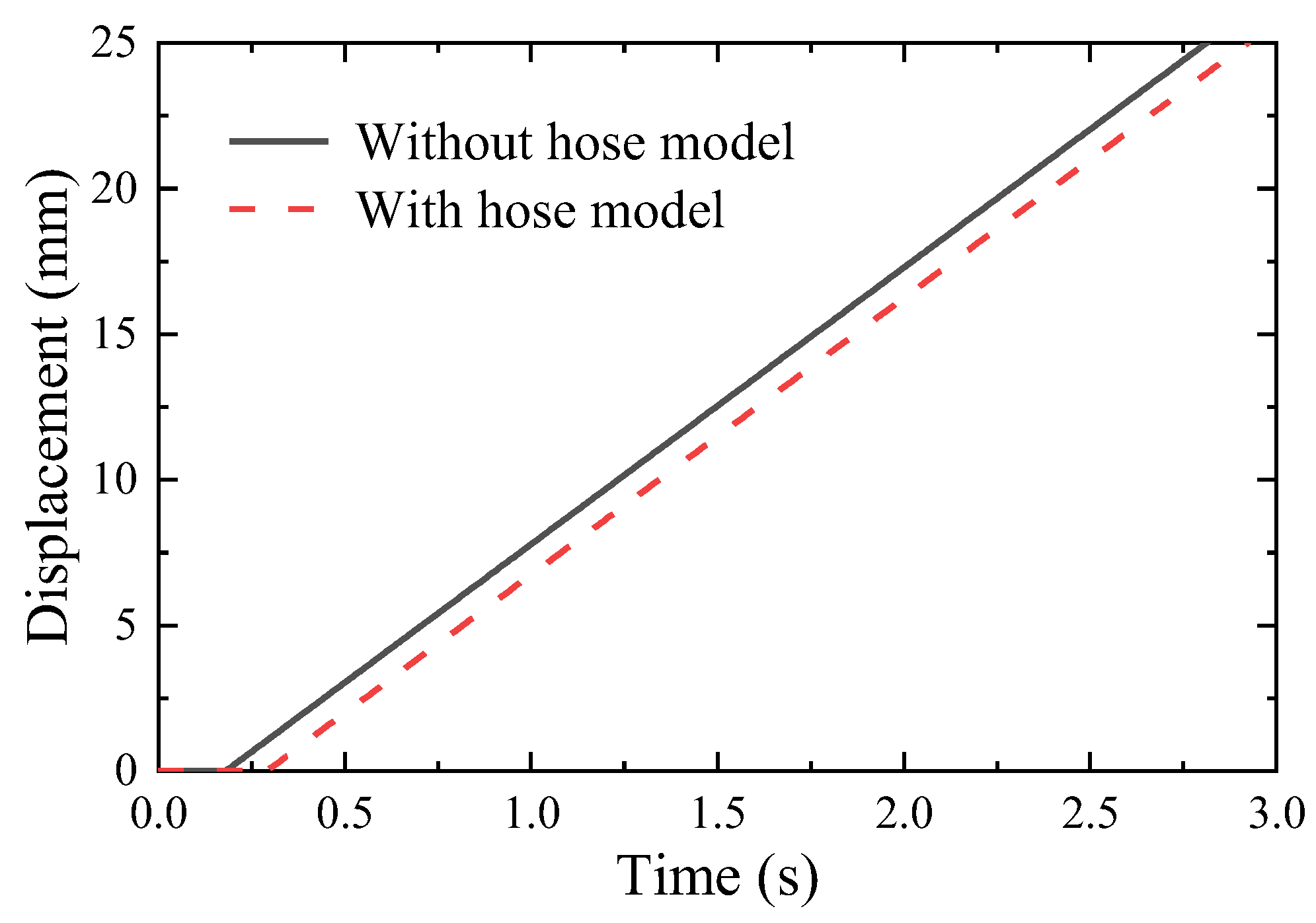
6.1. Model Validation
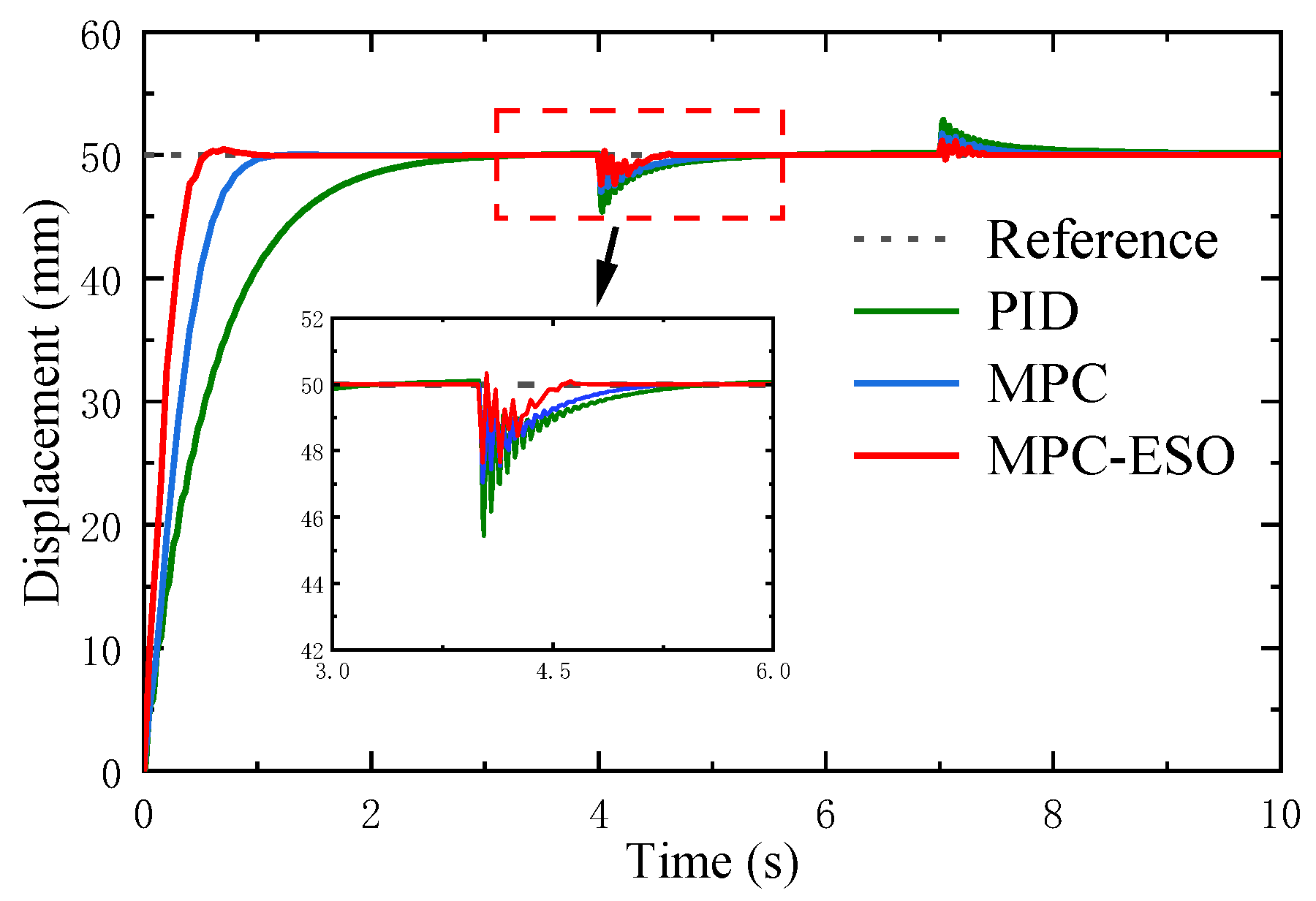
6.2. Load-Free Displacement Response
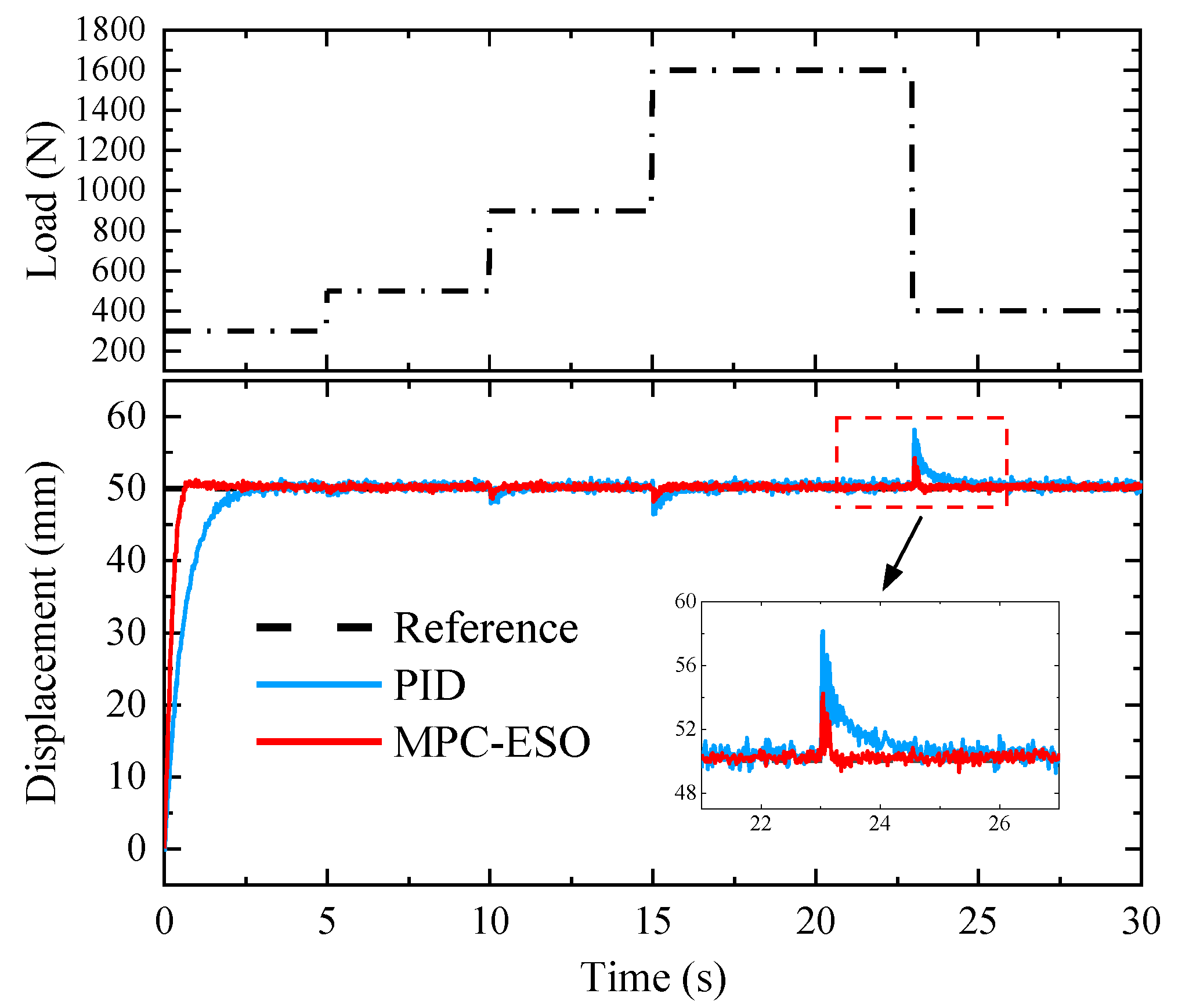
6.3. Displacement Response with Load
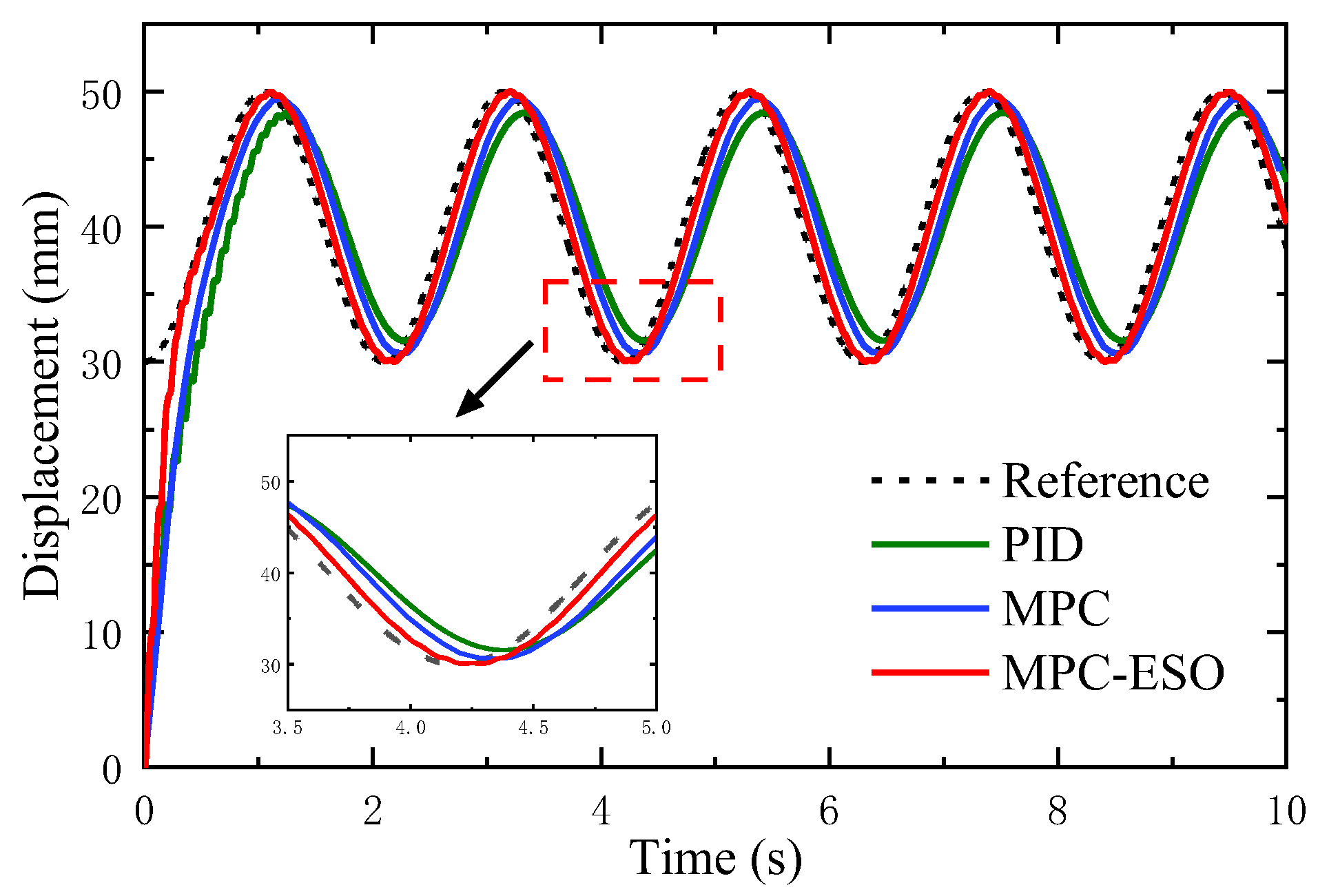
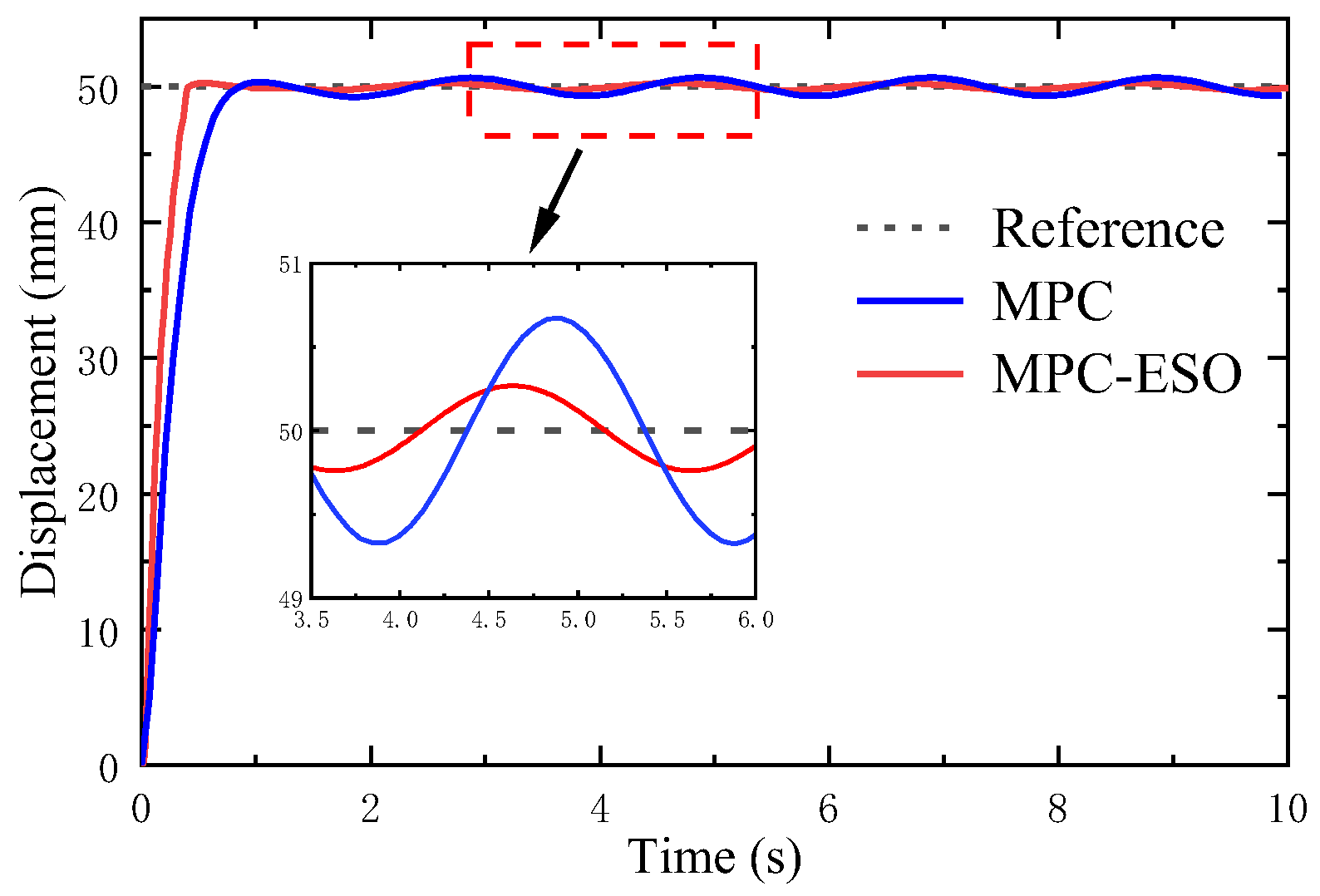
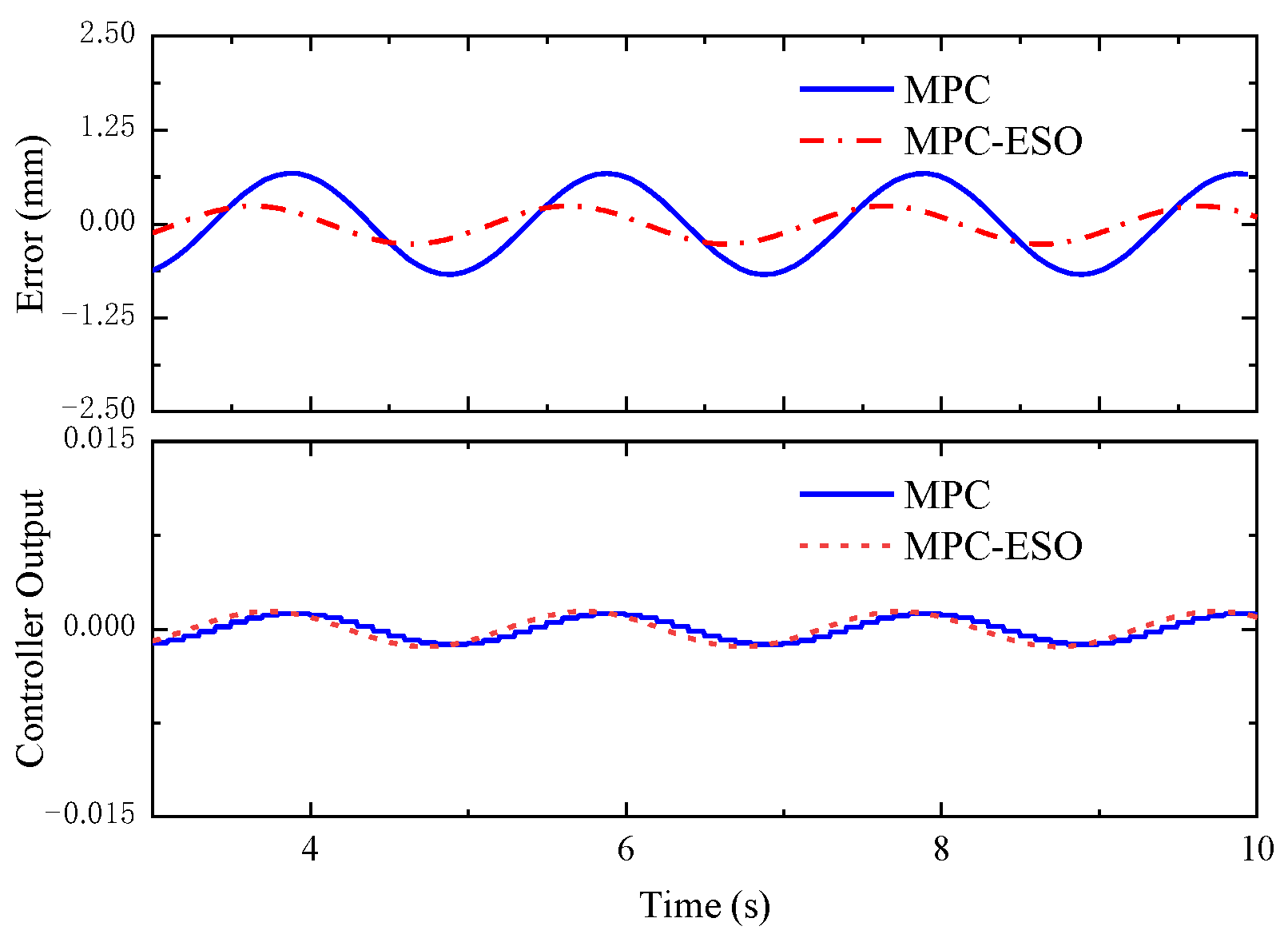
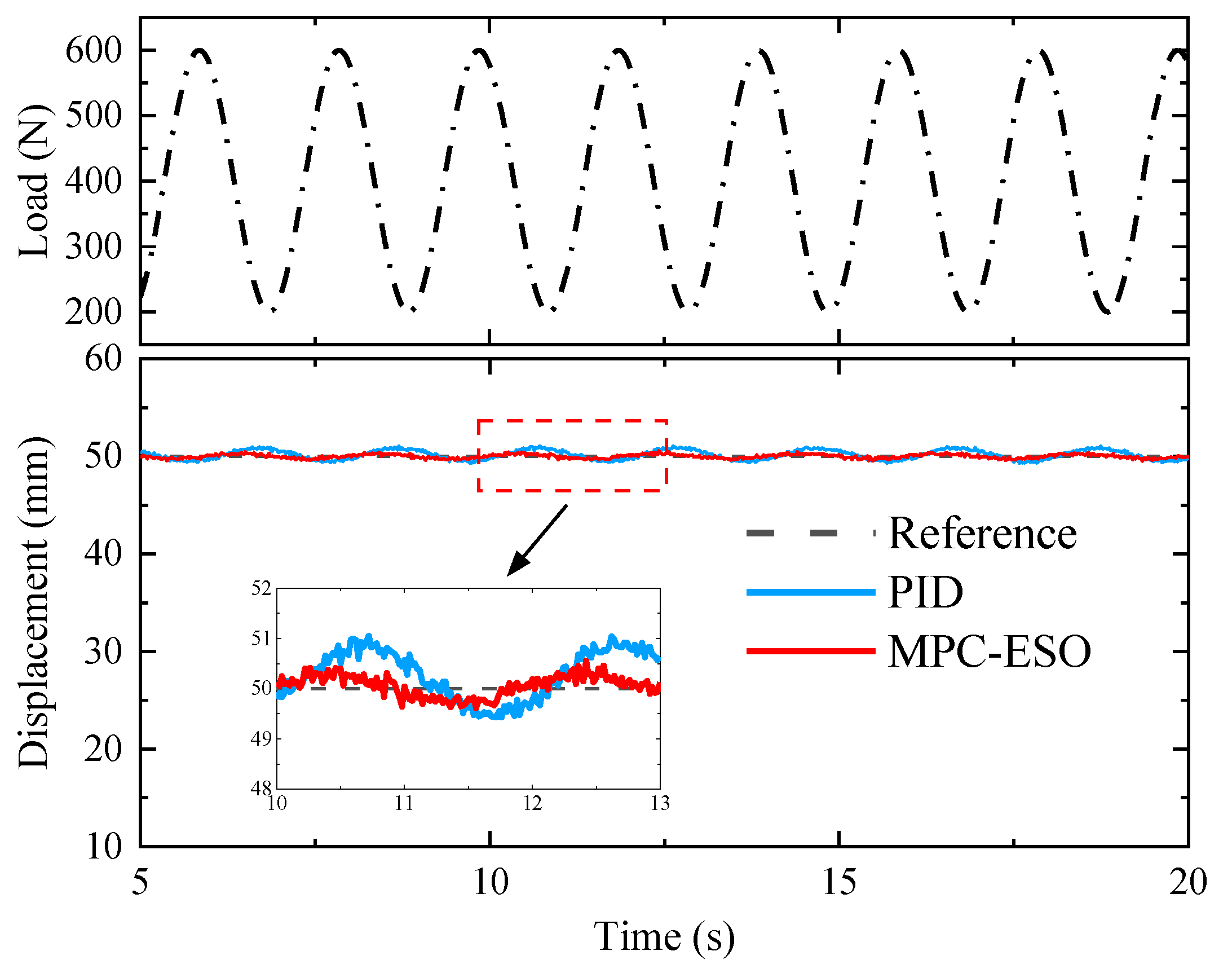
6.4. Displacement Control Experiment
7. Conclusions
- (1)
- GRNN’s nonlinear mapping by using experimental data achieves accurate identification of volumetric variation of the hose (average errors do not exceed 5%) and improves the precision for the whole actuation system model.
- (2)
- The proposed MPC-ESO hybrid control strategy effectively overcomes the impact of the model error, parameter, or environment uncertainties on the displacement control performance of the miniature double-cylinder actuation system. Additionally, it can shorten the response duration and tracking lag, and decrease the output oscillation of the system under load disturbances.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Soojun, L.; Jaewook, O.; Lee, Y.-K.; Choi, J. Development of Micro Hydraulic Actuator for force assistive wearable robot. In Proceedings of the IEEE ISR 2013, Seoul, Republic of Korea, 24–26 October 2013; IEEE: Piscataway Township, NJ, USA, 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Qiu, H.; Su, Q. Simulation Research of Hydraulic Stepper Drive Technology Based on High Speed on/off Valves and Miniature Plunger Cylinders. Micromachines 2021, 12, 438. [Google Scholar] [CrossRef] [PubMed]
- Volder, M.D.; Reynaerts, D. Development of a hybrid ferrofluid seal technology for miniature pneumatic and hydraulic actuators. Sens. Actuators A Phys. 2009, 152, 234–240. [Google Scholar] [CrossRef]
- Kutin, J.; Bajsi, I. Fluid-dynamic loading of pipes conveying fluid with a laminar mean-flow velocity profile. J. Fluids Struct. 2014, 50, 171–183. [Google Scholar] [CrossRef]
- Hyvrinen, J.; Karlsson, M.; Zhou, L. Study of concept for hydraulic hose dynamics investigations to enable understanding of the hose fluid–structure interaction behavior. Adv. Mech. Eng. 2020, 12, 717–736. [Google Scholar] [CrossRef]
- Hou, J.; Zhang, Z.; Gong, Y. Model Simplification of Hoses in a Hydraulic Lifting System. In Proceedings of the 2014 2nd International Conference on Manufacturing Engineering and Technology for Manufacturing Growth, Miami, FL, USA, 20–21 January 2014. [Google Scholar]
- Jian, L.; Yong, L.; He, F.; Miao, L. Motion control of hydraulic actuators with nonlinear friction compensation: Applied to variable valve systems of diesel engine. ISA Trans. 2023, 137, 561–573. [Google Scholar] [CrossRef]
- Du Phan, V.; Truong, H.V.A.; Ahn, K.K. Actuator failure compensation-based command filtered control of electro-hydraulic system with position constraint. ISA Trans. 2022, 134, 561–572. [Google Scholar] [CrossRef]
- Wang, J.; Liu, Z.; Xu, C.; Li, Z. Measurement Method of Compressibility and Thermal Expansion Coefficients for Density Standard Liquid at 2329 kg/m~3 based on Hydrostatic Suspension Principle. Chin. J. Mech. Eng. 2014, 27, 784. [Google Scholar] [CrossRef]
- Rao, J.; Fan, Z.; Huang, Q.; Luo, Y.; Zhang, X.; Guo, H.; Yan, X.; Tian, G.; Chen, D.; Hou, Z.; et al. Experimental search for high-performance ferroelectric tunnel junctions guided by machine learning. J. Adv. Dielectr. 2022, 12, 2250005. [Google Scholar] [CrossRef]
- Ismail, N.H. ANN approaches to determine the dielectric strength improvement of MgO based low density polyethylene nanocomposite. J. Adv. Dielectr. 2021, 11, 27–36. [Google Scholar] [CrossRef]
- Mosalaosi, Y.M. Performance evaluation of natural esters and dielectric correlation assessment using artificial neural network (ANN). J. Adv. Dielectr. 2020, 10, 69–78. [Google Scholar] [CrossRef]
- Khatib, T.; Elmenreich, W. An Improved Method for Sizing Standalone Photovoltaic Systems Using Generalized Regression Neural Network. Int. J. Photoenergy 2014, 2014, 748142. [Google Scholar] [CrossRef] [Green Version]
- Hu, R.; Wen, S.; Zeng, Z.; Huang, T. A short-term power load forecasting model based on the generalized regression neural network with decreasing step fruit fly optimization algorithm. Neurocomputing 2017, 221, 24–31. [Google Scholar] [CrossRef]
- Carneiro, J.F.; Pinto, J.B.; De Almeida, F.G. Accurate Motion Control of a Pneumatic Linear Peristaltic Actuator. Actuators 2020, 9, 63. [Google Scholar] [CrossRef]
- Minav, T.; Pietola, M.; Filatov, D.M.; Devyatkin, A.V.; Heikkinen, J. Fuzzy control of direct-driven hydraulic drive without conventional oil tank. In Proceedings of the 2017 XX IEEE International Conference on Soft Computing and Measurements (SCM), Saint Petersburg, Russia, 24–26 May 2017; pp. 444–447. [Google Scholar] [CrossRef]
- Wrat, G.; Bhola, M.; Ranjan, P.; Mishra, S.K.; Das, J. Energy saving and Fuzzy-PID position control of electro-hydraulic system by leakage compensation through proportional flow control valve. ISA Trans. 2020, 101, 269–280. [Google Scholar] [CrossRef]
- Yang, H.; Wang, Z.; Xia, Y.; Zuo, Z. EMPC with adaptive APF of obstacle avoidance and trajectory tracking for autonomous electric vehicles. ISA Trans. 2022, 135, 438–448. [Google Scholar] [CrossRef]
- Nguyen, H.T.; Jung, J.W. Finite Control Set Model Predictive Control to Guarantee Stability and Robustness for Surface-Mounted PM Synchronous Motors. IEEE Trans. Ind. Electron. 2018, 65, 8510–8519. [Google Scholar] [CrossRef]
- Hasan, M.D.S.; Hafni, A.E.; Kennel, R. Position control of an electromagnetic actuator using model predictive control. In Proceedings of the 2017 IEEE International Symposium on Predictive Control of Electrical Drives and Power Electronics (PRECEDE), Pilsen, Czech Republic, 4–6 September 2017; pp. 37–41. [Google Scholar] [CrossRef]
- Peng, Y.; Wang, J.; Wei, W. Model predictive control of servo motor driven constant pump hydraulic systemin injection molding process based on neuro-dynamic optimization. J. Zhejiang Univ.-Sci. C 2014, 15, 139–146. [Google Scholar] [CrossRef]
- Miaolei, H.; Jilin, H. Extended State Observer-Based Robust Backstepping Sliding Mode Control for a Small-Size Helicopter. IEEE Access 2018, 6, 33480–33488. [Google Scholar] [CrossRef]
- Wang, B.; Ji, H.; Chang, R. Position Control with ADRC for a Hydrostatic Double-Cylinder Actuator. Actuators 2020, 9, 112. [Google Scholar] [CrossRef]
- Specht, D.F.; Romsdahl, H. Experience with adaptive probabilistic neural networks and adaptive general regression neural networks. In Proceedings of the 1994 IEEE International Conference on Neural Networks (ICNN’94), Orlando, FL, USA, 28 June–2 July 1994; IEEE: Piscataway Township, NJ, USA, 1994; Volume 2, pp. 1203–1208. [Google Scholar] [CrossRef]
- Song, Y.; Du, Z. Generalized Regression Neural Network Based Predictive Model of Nonlinear System. Telkomnika Indones. J. Electr. Eng. 2013, 12, 1996–2002. [Google Scholar] [CrossRef]
- Yang, Z.; Xu, G.; Wang, J. Transport volume forecast based on GRNN network. In Proceedings of the 2010 2nd International Conference on Future Computer and Communication, Wuhan, China, 21–24 May 2010; IEEE: Piscataway Township, NJ, USA, 2010; Volume 3, pp. V3-629–V3-632. [Google Scholar] [CrossRef]
- Yang, C.; Ma, J.; Wang, X.; Li, X.; Li, Z.; Luo, T. A novel based-performance degradation indicator RUL prediction model and its application in rolling bearing. ISA Trans. 2022, 121, 349–364. [Google Scholar] [CrossRef]
- Guo, B.Z.; Zhao, Z.L. On the convergence of an extended state observer for nonlinear systems with uncertainty. Syst. Control. Lett. 2011, 60, 420–430. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| m | 50 kg | r | 0.003 m |
| AP1 | 3.77 × 10−4 m2 | l | 1 m |
| AP2 | 4.91 × 10−4 m2 | σ | 0.1 |
| AA1 | 3.14 × 10−4 m2 | k2 | 1 × 10−6 |
| AA2 | 2.01 × 10−4 m2 | μvisc | 200 N·s/m |
| Parameter | Value | Parameter | Value | Parameter | Value |
|---|---|---|---|---|---|
| P | 2.7 | NP2(MPC-ESO) | 8 | h | 0.006 |
| I | 0.05 | Nc2(MPC-ESO) | 3 | h0 | 0.005 |
| Np1(MPC) | 6 | β1 | 30 | b | 8 |
| Nc1(MPC) | 2 | β2 | 100 | b0 | 0.02 |
| TS | 0.1 s | β3 | 40 |
| Step Response | |||
|---|---|---|---|
| MPC-ESO | MPC | PID | |
| Rise time | 0.75 s | 1.2 s | 3.1 s |
| Steady-state error | 0 mm | 0 mm | 0.12 mm |
| Square error | 0.0065 mm2 | 0.01 mm2 | 0.69 mm2 |
| Step Load Response | |||
|---|---|---|---|
| MPC-ESO | MPC | PID | |
| Overshoot | 2.82% | 5.9% | 9.12% |
| Settling Time | 0.65 s | 1.2 s | 2.1 s |
| RMSM | 0.81 mm | 1.64 mm | 2.2 mm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, T.; Wang, B.; Wang, Z. MPC-ESO Position Control Strategy for a Miniature Double-Cylinder Actuator Considering Hose Effects. Micromachines 2023, 14, 1201. https://doi.org/10.3390/mi14061201
Ma T, Wang B, Wang Z. MPC-ESO Position Control Strategy for a Miniature Double-Cylinder Actuator Considering Hose Effects. Micromachines. 2023; 14(6):1201. https://doi.org/10.3390/mi14061201
Chicago/Turabian StyleMa, Tengfei, Bin Wang, and Zhenhao Wang. 2023. "MPC-ESO Position Control Strategy for a Miniature Double-Cylinder Actuator Considering Hose Effects" Micromachines 14, no. 6: 1201. https://doi.org/10.3390/mi14061201