1. Introduction
Micromachined vibratory gyroscopes are typical MEMS inertia sensors used for the measurement of the angular velocities of carriers [
1,
2]. Their operation is based on energy transfer from the driving mode to its perpendicular vibrational mode, i.e., the detecting mode, due to Coriolis effect [
3]. The magnitude of oscillation in the detecting mode provides a measure of the detected angular velocity. The electrostatic principles are the most widely used actuation and transduction principles of micro gyroscopes [
4]. To achieve a high operating performance, electrostatic micro gyroscopes are supposed to work in a linear state and provide a linear response. However, due to the microscale effect, there are inherent nonlinear factors in the vibratory systems of electrostatic micro gyroscopes that stem from damping [
5], flexure springs [
6] and electrostatic forces [
7]. It usually leads to nonlinear dynamic behaviors and the loss of stability, sensitivity and reliability of the micro gyroscopes.
To improve the performance and exploit the application of electrostatic micro gyroscopes, there have been a few studies concerning their nonlinear dynamics in recent years. The characteristics of harden/soften nonlinear stiffness was found in 2-DOF lumped-parameter vibrating systems of electrostatic micro gyroscopes [
8,
9,
10,
11,
12,
13]. Kacem [
8] proposed a Mathieu resonator for micro gyroscope applications and established its practical design on the basis of the analytical study of its nonlinear dynamics. Considering a micromechanical gyroscope excited by the driving electrostatic torque, Awrejcewicz [
9] presented the approximate solution of its dynamic system analytically under the simultaneous occurrence of the main and internal resonances. Zhang et al. [
10] investigated the local bifurcation of the periodic response of a micro gyroscope with cubic supporting stiffness and fractional electrostatic forces and found the parameter regions to meet the performance requirements of the micro sensor. For a 4-DOF micro gyroscope system with nonlinearity of the driving stiffness, primary resonance and 1:1 internal resonance, the spring hardening effect as well as multistability were also observed [
14].
For the normal work performance of micro gyroscopes, multistability is undesirable, as a jump among multiple responses can lead to the loss of the detection reliability of the devices. Oropeza-Ramos et al. [
15] presented the jump phenomenon of the driving mode of a novel Micro-electro gyroscope system experimentally. Shang et al. [
16] depicted the jump between bistable periodic responses quantitatively via the classification of the basins of attraction. Nevertheless, there are few studies concerning the effect of the initial conditions on inducing the jump of micro gyroscopes, because in most previous theoretical studies on jumps, the disturbance of the initial conditions was ignored; namely, the initial conditions were tacitly assumed to be unchanged.
Complex dynamic behaviors, such as quasi-periodic responses [
17] and chaos [
18,
19], were also found in the vibration of MEMS electrostatic gyroscopes. Tsai [
18] focused on the resonance of a MEMS ring gyroscope under nonlinearity effects and numerically inspected the chaotic behavior of the driving and sensing modes.
Another initial-sensitive phenomenon of electrostatic micro gyroscopes is pull-in instability, which is closely related to the pull-in behavior. The pull-in of capacitors means the contact of two neighboring capacitors and the stop of micro gyroscopes’ operation. To be specific, there are two types of pull-in: static pull-in [
20,
21,
22] and dynamic pull-in [
23,
24]. The former comes from the imbalanced static case of the microstructures, thus being unavoidable, whereas the occurrence of the latter relies on the initial states of the oscillatory systems. For instance, Ouakad [
23] numerically displayed the dynamic pull-in caused by variations in the static displacement of a vibrating-beam micro gyroscope at its connected tip. Pull-in instability represents the sensitivity of the initial conditions, leading to dynamic pull-in. In other words, a small disturbance of the initial conditions induces a sudden pull-in, meaning the loss of the structural safety of the micro devices. In single-degree-of-freedom micro resonator systems, pull-in instability has been extensively studied [
25,
26,
27]. However, in multiple-degree-of-freedom micro gyroscope systems, the mechanism of the pull-in instability of capacitors has not yet been studied.
Therefore, in this study, two initial-sensitive phenomena of the MEMS gyroscopes, namely jump and pull-in instability, are investigated. The outline of this paper is as follows: First, the vibrating system of a typical electrostatic micro gyroscope and its unperturbed system are proposed; on this basis, the voltage threshold for the static pull-in of the detecting direction is analyzed. In
Section 3, via the analysis of the local bifurcation of periodic solutions and the classification of basins of attraction, conditions for the coexistence of multiple responses and jumps are presented. Then, the phenomenon of pull-in instability is discussed analytically and numerically in
Section 4. Finally,
Section 5 and
Section 6 contain the discussion and conclusions.
2. Dynamic Model of a MEMS Gyroscope and Its Unperturbed System
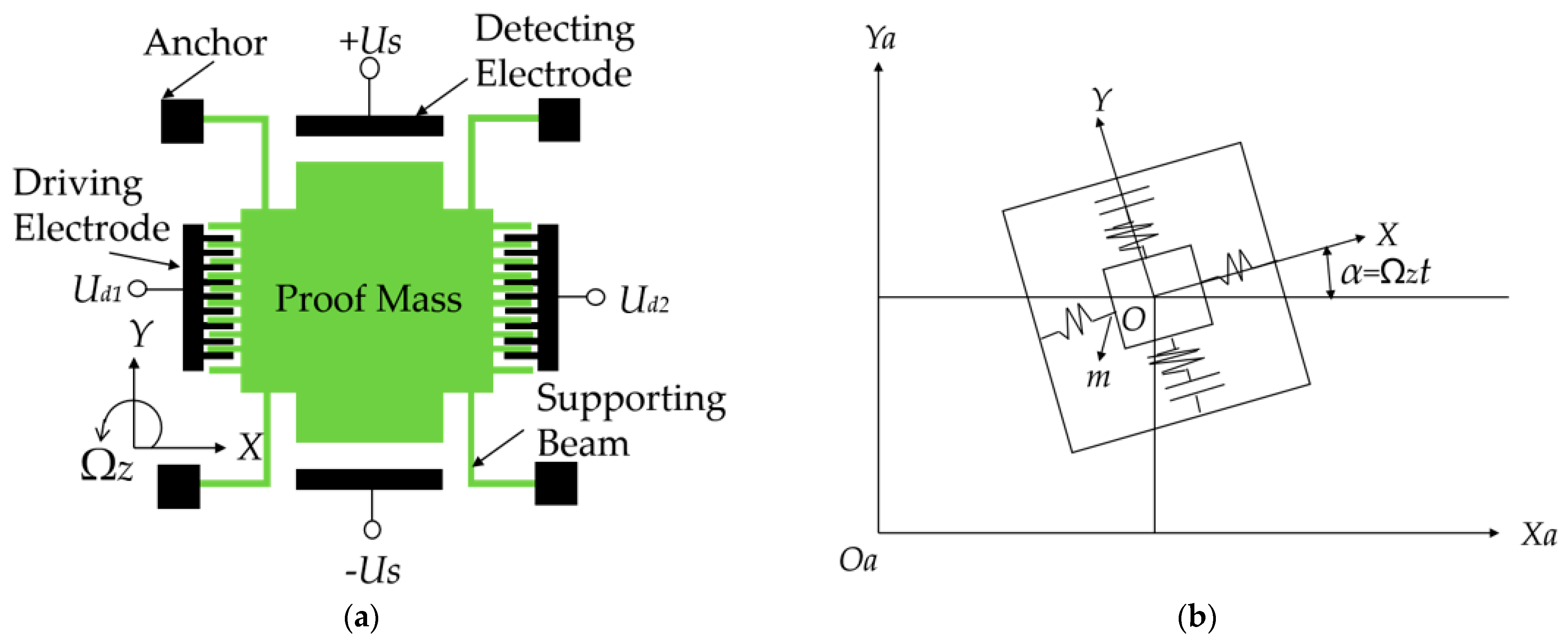
We consider a typical comb-tooth micro-machined gyroscope driven by electrostatic forces, whose schematic representation is shown in
Figure 1 [
10,
15,
16]. Here,
m represents the sensitive mass of the micro gyroscope physically existing in two operating modes, i.e., the driving mode and the detecting mode.
Xa-
Oa-Ya means the absolute coordinate system, where
and
are the horizontal and vertical displacements of the sensitive mass, respectively, whereas
XOY means the relative coordinate system of the driving and detecting modes of the micro gyroscope, where the origin O is the center of the sensitive mass and
X and
Y are the relative displacements of the mass in the driving and detecting directions at moment
t, respectively. The Z axis is perpendicular to the plane
XOY.
is the angular displacement of the gyroscope around the
z-axis.
is the angular velocity of the carrier of the MEMS gyroscope to be measured. As can be seen in
Figure 1, the micro gyroscope is actuated by electrostatic forces. The detecting voltage is DC voltage, noted by
. In the driving direction, voltages
and
can be expressed by [
10,
15]
where
is the bias DC voltage and
and
are the amplitude and frequency of the AC voltage, respectively.
In the vacuum environment of this micro-gyroscope, air damping is related to the degree of the vacuum, which means that the air damping is relatively small, and its nonlinear factors can be ignored. The nonlinearities of the stiffness of the driving and detecting modes are taken into account. The electrostatic forces in the driving and detecting directions are also nonlinear, as they are nonlinear functions of the driven voltages. Considering these factors and based on the Lagrange equations, the vibrating system of the sensitive mass can be expressed as the following 2-DOF dynamic equation:
where the electrostatic forces
and
can be given by [
10,
15]
The physical interpretation of the parameters in Equations (2) and (3) is provided in
Table 1. Here, the device is considered to be made of polysilicon, relaxed at room temperature (300 K) and in a high vacuum environment. As the validity of this model was examined extensively in [
15], the values of the geometrical and material parameters in the following calculations are adopted from [
15] (see
Table 1). Without detriment to accuracy, this model is able to properly catch the essential aspects of the nonlinearities of micro gyroscopes. Referring to it, we focus on the effect of the AC voltage frequency
and amplitude
in the drive direction on the global dynamics of the micro gyroscope. Note that
in Equation (2) shows the gap width between the proof mass and the upper or lower movable electrode of the detecting direction becoming zero, namely the pull-in of the micro gyroscope in the detecting direction.
By introducing the following non-dimensional variables
into Equation (2), we can obtain the following non-dimensional system:
All non-dimensional parameters in the above equation are positive. Variable x in Equation (5) should satisfy |y| ≤ 1. |y| = 1 means the pull-in of the microstructures in the detecting direction.
The equilibria of system (5) can be solved using the following equation:
The static bifurcation of the equilibria was discussed in [
27], according to which
is the fork–bifurcation point. There are two cases for the number of equilibria and the potential well of system (5), as follows:
For
or
, there is only one equilibrium and no potential well, meaning that all unperturbed orbits are unbounded. In the detecting direction, the unbounded orbits inevitably lead to pull-in. Returning the conditions of parameters
and
β to the original system’s parameters, we can obtain the conditions of the detecting voltage for static pull-in:
or
For
, namely
there are three equilibria of system (5). One equilibrium, C
, is the center of a potential well surrounded by heteroclinic orbits crossing two saddles,
, where
For case 2, to determine the exact heteroclinic orbits, we let
to translate the origin O to the center C
and to rewrite the nondimensional system (5) as
Its unperturbed system and Hamiltonian function can be expressed as
and
respectively. Hence, the corresponding heteroclinic orbits (
) can be given by
Obviously, the unperturbed system (12) is a high-dimensional system whose heteroclinic orbits are in a four-dimensional space, thus being hard to depict. Based on the unperturbed system (12), we introduce a new variable, R, to express
and
, as shown below:
Then, the heteroclinic orbits can be depicted in the three-dimensional space
, given by
According to
Table 1, the invariable parameters of the non-dimensional system (11) can be calculated as
Because Equation (17) satisfies
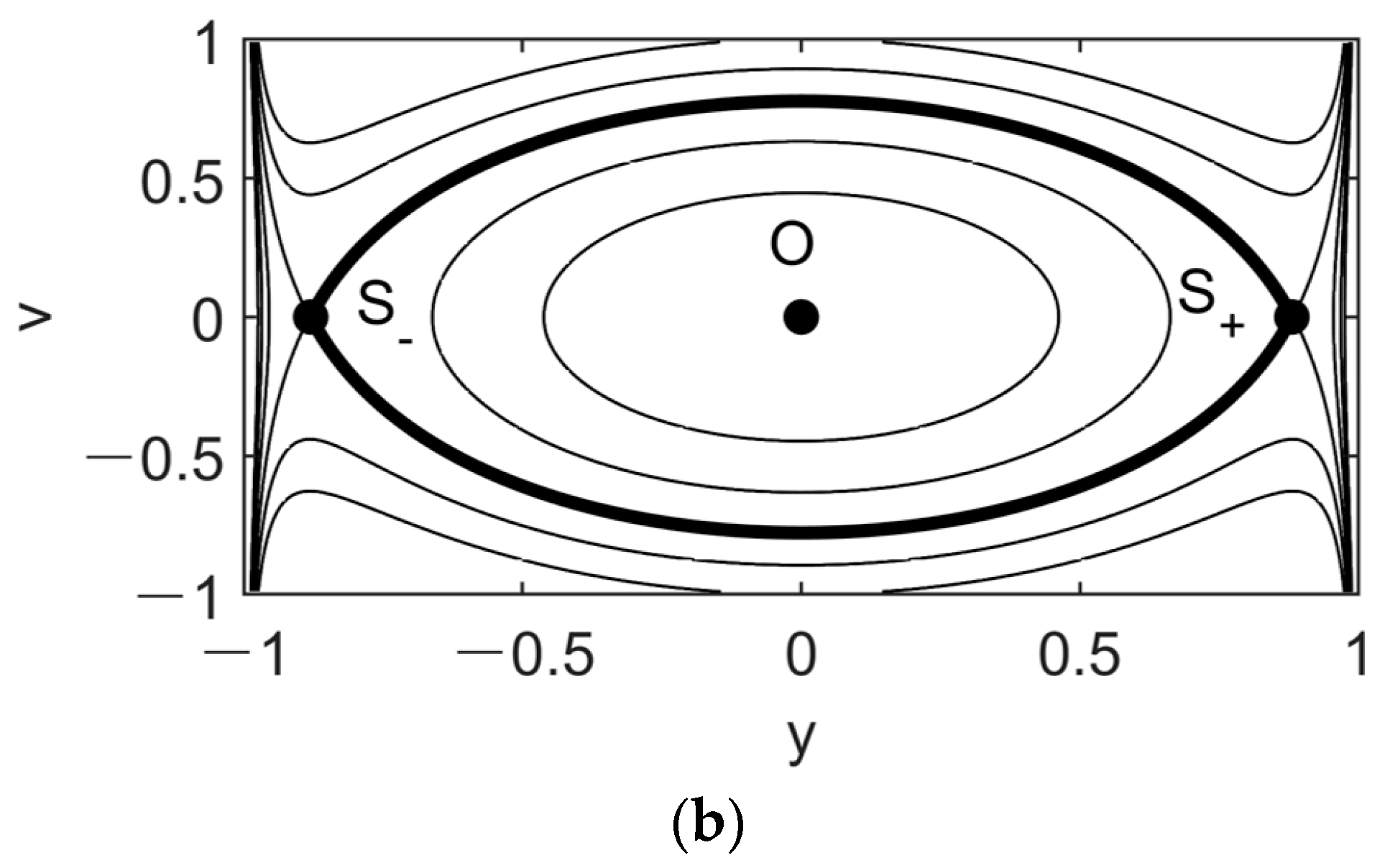
, static pull-in does not occur. Instead, there is a potential well surrounded by heteroclinic orbits, as can be seen in
Figure 2. For a fixed value of
R, the heteroclinic orbits of the unperturbed system (12) can be observed in a plane parallel to the y-O-v plane. Here the black dots in
Figure 2 represent saddle points. For
R = 0, the projection of the heteroclinic orbits can be observed intuitively in the y-O-v plane (see
Figure 2b). The sensitive mass undergoes a free stable oscillation in the detecting direction if its initial state is disturbed from the center and within the surroundings of the heteroclinic orbits (see the thick closed loop in
Figure 2b). However, if its initial conditions are chosen outside of these surroundings, it undergoes an unbounded motion, as shown in the open loop trajectories in
Figure 2b, implying dynamic pull-in. In other words, whether the phenomenon of pull-in occurs depends on the initial conditions of system (11). Therefore, the initial sensitivity for dynamic pull-in, namely pull-in instability, can be discussed only if Equation (9) is satisfied.
4. Pull-in Instability of the MEMS Gyroscope
In this section, necessary conditions and numerical simulations for pull-in instability are presented. The vibration of the nondimensional system (5) is the so-called dynamic pull-in if its amplitude exceeds 1 at a certain moment, demonstrating an unbounded solution escaping from the potential well. The union of all corresponding initial conditions, i.e., the BA of dynamic pull-in, is unsafe for the work performance of the micro gyroscope. Therefore, the union of the BAs of all the bounded responses is the so-called safe basin [
23,
26]. Pull-in instability can be described by the erosion of the safe basin [
27,
28], namely the fractality of safe basin boundaries, meaning that a tiny disturbance of initial conditions induces an excessive or unbounded vibration. Because pull-in instability indicates the loss of the global integrity of the MEMS gyroscope system, it is usually attributed to global bifurcation. Based on the analysis of
Section 2, there are heteroclinic orbits in the unperturbed system of system (5) depicted in three-dimensional space. The critical conditions for the heteroclinic tangency of the stable and unstable manifolds can be analyzed in the three-dimensional space
R-y-v. The Melnikov method, a typical method used for discussing global bifurcations [
29], is utilized to predict the necessary conditions for pull-in instability in the detecting direction of the micro gyroscope.
According to the heteroclinic orbits shown in
Figure 2a, by fixing the value of
R in the three-dimensional space
y-v-R, we may have a two-dimensional section heteroclinic orbits
, similar to that in
Figure 2b. Based on Equation (16),
and
are functions of
R. For each section parallel to the
y-o-v plane, the heteroclinic orbits cross two saddle points, noted by
, where
According to the condition
, the maximum value of the parameter R noted by
can be determined below:
As the heteroclinic orbits
cannot be expressed by the explicit functions of the time
T, we cannot employ the Melnikov function directly. To deal with this problem, we introduce a new transformation parameter
to express the heteroclinic orbits and the time
T as the explicit functions of
. It is assumed that [
30]
The heteroclinic orbits can be expressed as
Substituting Equations (47) and (48) into the unperturbed system (12) yields
Then, substituting Equation (50) into Equation (47) and integrating it yield the following explicit function of the time
T:
where
.
To apply the Melnikov method, we first rewrite the non-dimensional system (11) as
where
Then, substituting the functions of the heteroclinic orbits and the time
T into the Melnikov integrals of system (11), we have
and
where
When , according to the limits of the above equation, we have .
For the occurrence of the transverse intersection between the stable and unstable heteroclinic manifolds of system (11), there should be a simple zero in the Melnikov functions (53) and (54). Letting the function
M2 be zero, we can solve
R in the following equation:
Substituting Equations (54) and (55) into
M1 = 0, we conclude that the Melnikov function can have a simple equilibrium only if
Expressing the nondimensional parameter
f using the original system parameters, we can obtain the necessary condition of the driving AC voltage amplitude for heteroclinic bifurcation, given by
It follows that the increase in the amplitude of the driving AC voltage may lead to pull-in instability of the micro gyroscope.
For the given values of the parameters in Equation (17), the critical value of
can be calculated as
. This shows that pull-in stability can be ensured when
is less than 0.12 mV. Reviewing the BAs of the detecting state initial plane of
Figure 5, we can easily observe that, for
increasing from 0.02 mV to 0.06 mV, even though the steady responses and their BAs change qualitatively (see
Figure 5(a4,b4,c4)), the safe basins of the detecting mode, namely the union of the BAs of bounded attractors, are still similar to smooth boundaries to separate unsafe zones for dynamic pull-in. In contrast, for
, more than
, the safe basin of system (11), i.e., the BA of the high-amplitude attractor (see
Figure 5(d4)), becomes fractal, indicating that either a large initial displacement or velocity in the detecting direction results in poor pull-in stability. Hence, the evolution of the safe basin of the detecting mode in
Figure 5 matches the analytical prediction in this section well. Note that, in
Figure 5(d4), despite the fractal basin boundary, no initial conditions in the vicinity of the point (0,0) develop into pull-in, showing a low possibility of pull-in occurrence.
Now, continuing to increase
, the sequences of the safe basin of system (11) in the detecting state initial plane
are illustrated in
Figure 6. As
varies from 0.50 mV to 60 mV, there is only one bounded attractor in system (11), namely a periodic response, similar to that of
Figure 5(d1,d2)). Hence, a safe basin in the detecting state initial plane is just the BA of the periodic response in the detecting direction. Similar to
Figure 5(d4), the safe basin of
Figure 6 is marked in blue. As can be seen in
Figure 6, with the increase in
, the fractality of the safe basin becomes more and more visible. The safe basin is shrunk toward (0,0) when the driving AC voltage amplitude increases greatly. Consequently, the probability of a pull-in occurrence becomes higher, indicating the aggravation of pull-in instability. Specifically, as shown in
Figure 6c,d, the vicinity of (0,0) is eroded, showing pull-in instability and an extremely high possibility of a pull-in occurrence of the micro gyroscope. The sequences of safe basins in
Figure 5 and
Figure 6 illustrate that, due to the heteroclinic bifurcation of the MEMS gyroscope system, the increase in the amplitude of the driving AC voltage leads to pull-in instability. Therefore, the amplitude of the driving AC voltage should be selected to be a bit lower than the threshold
to ensure a single high-amplitude periodic response and to avoid jumps and pull-in instability. According to the quantitative results of
Figure 6, at the very least,
should be less than 10 times
to avoid the occurrence of dynamic pull-in in the vicinity of (0,0).
5. Discussion
In this paper, the dynamics of a comb-tooth micro gyroscope considering the nonlinearities of its stiffness and electrostatic forces are explored. We focus on the effect of the driving voltage on causing two types of initial-sensitive dynamic behaviors, i.e., jump and pull-in instability. By introducing nondimensional parameters, we obtain the nondimensional system. On this basis, under the primary resonance and 1:1 internal resonance of the system, the variation in periodic responses with the driving AC voltage is investigated via MMS. Basins of attraction are classified to quantitatively depict jumps among coexisting attractors induced by the disturbance of the initial conditions. Furthermore, the theory of global bifurcation is employed to predict the conditions for the pull-in instability of the micro gyroscope. By introducing the erosion of the safe basin to describe pull-in instability intuitively, the cell-mapping approach is applied to present numerical results that are in great agreement with the qualitative results, verifying the accuracy of the prediction. Several significant results are presented as follows.
First, the static bifurcation analysis of the equilibria shows that there is a critical value of the detecting voltage for triggering static pull-in of the micro gyroscope in the detecting direction; thus, the detecting voltage should be lower than it to avoid static pull-in.
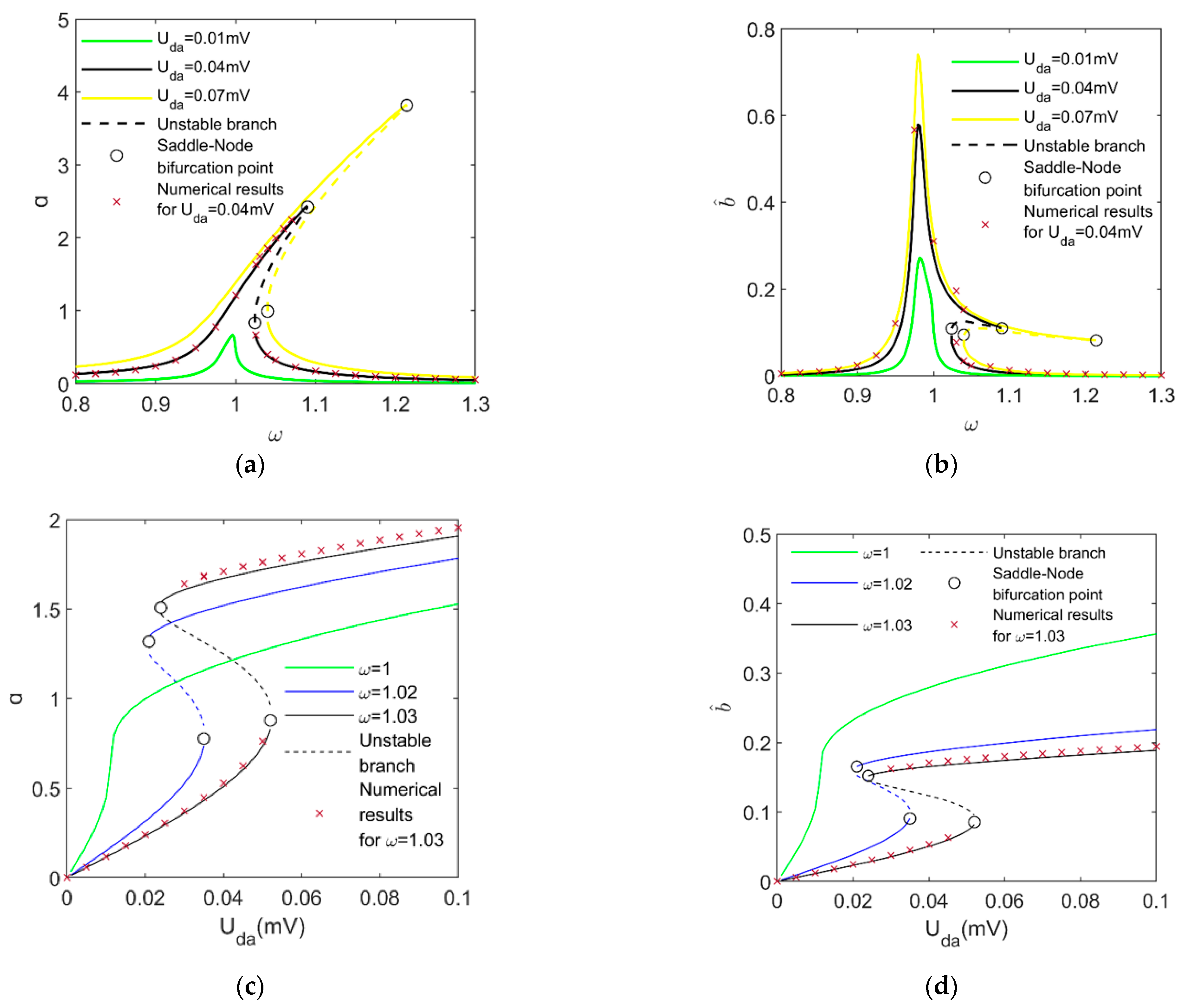
Second, when the stiffness nonlinearity in the detecting direction is weak, the output of the micro gyroscope is still proportional to the angular velocity to be measured, which is the basis for the normal performance of the micro gyroscope. However, this does not necessarily mean that the micro gyroscope can perform steadily, as the stiffness nonlinearity in the driving direction can lead to bistable periodic responses and thus the uncertainty of the gyroscope output.
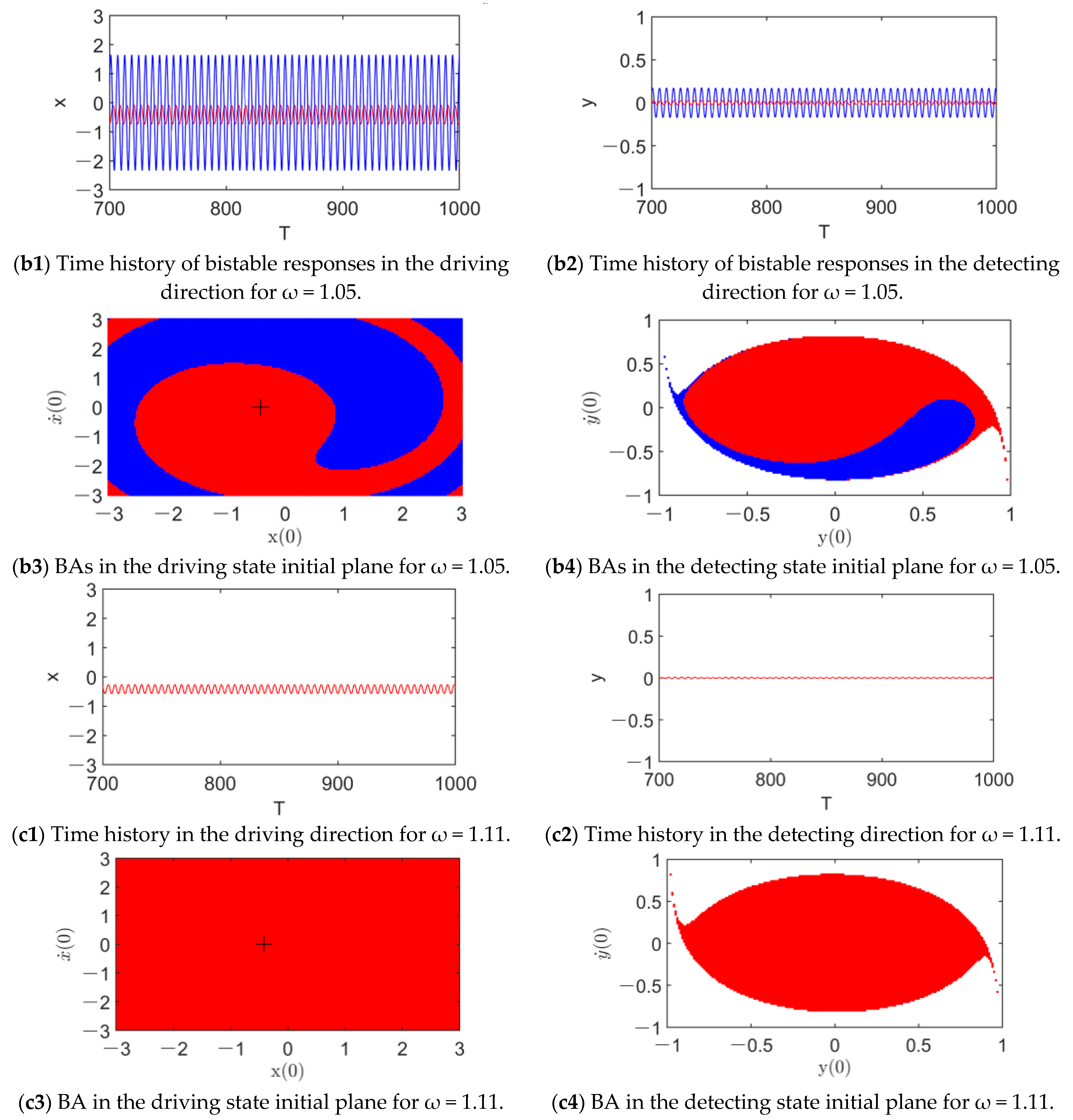
Third, due to the saddle-node bifurcation of the periodic solution, the nonlinear hardening behavior is typical right bending in the driving mode but right-down bending in the detecting mode. This indicates that, when the frequency of the driving AC voltage is within the right-side neighborhood of the natural frequency of the detecting mode, the increase in the driving AC voltage amplitude may induce bistability, and disturbances of the initial conditions may trigger jumps between bistable responses or dynamic pull-in, thus leading to the unreliability or insecurity of the micro gyroscope. Via the classification of basins of attraction, an applicable confident estimate of the system response can be developed to satisfy the stable output response of the gyroscope.
Finally, owing to the heteroclinic bifurcation of the micro gyroscope system, an increase in the driving AC voltage amplitude can lead to the aggravation of pull-in instability and an increasing probability of the occurrence of dynamic pull-in. Hence, the driving AC voltage amplitude should be selected to be a bit lower than the predicted threshold to ensure a steady high-amplitude output and thus a high reliability for the MEMS gyroscope.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}