
Fast Hologram Calculation Method Based on Wavefront Precise Diffraction




Abstract
:1. Introduction
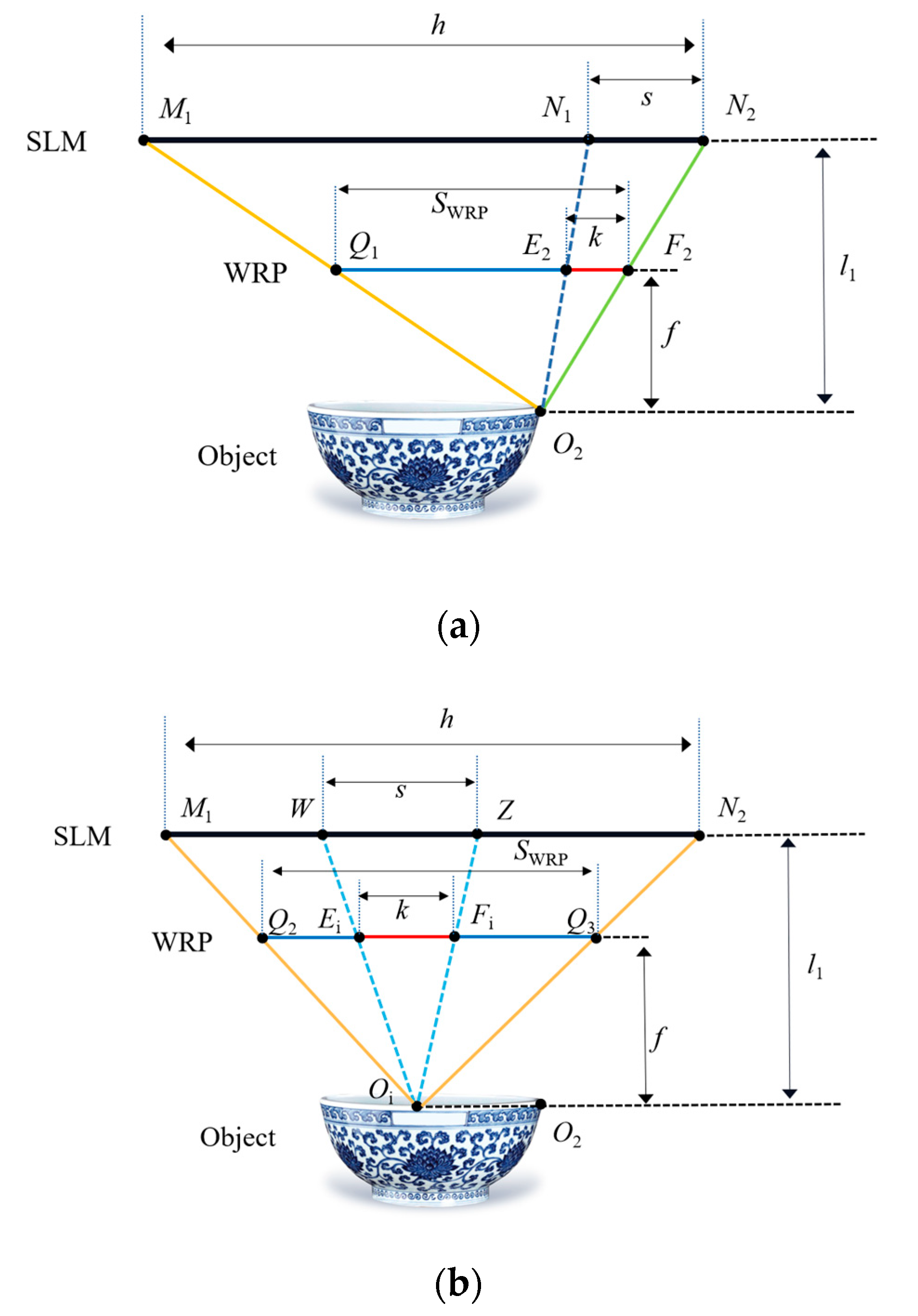
2. Principle of the Method
3. Experiments and Discussion
3.1. Calculation of the Hologram
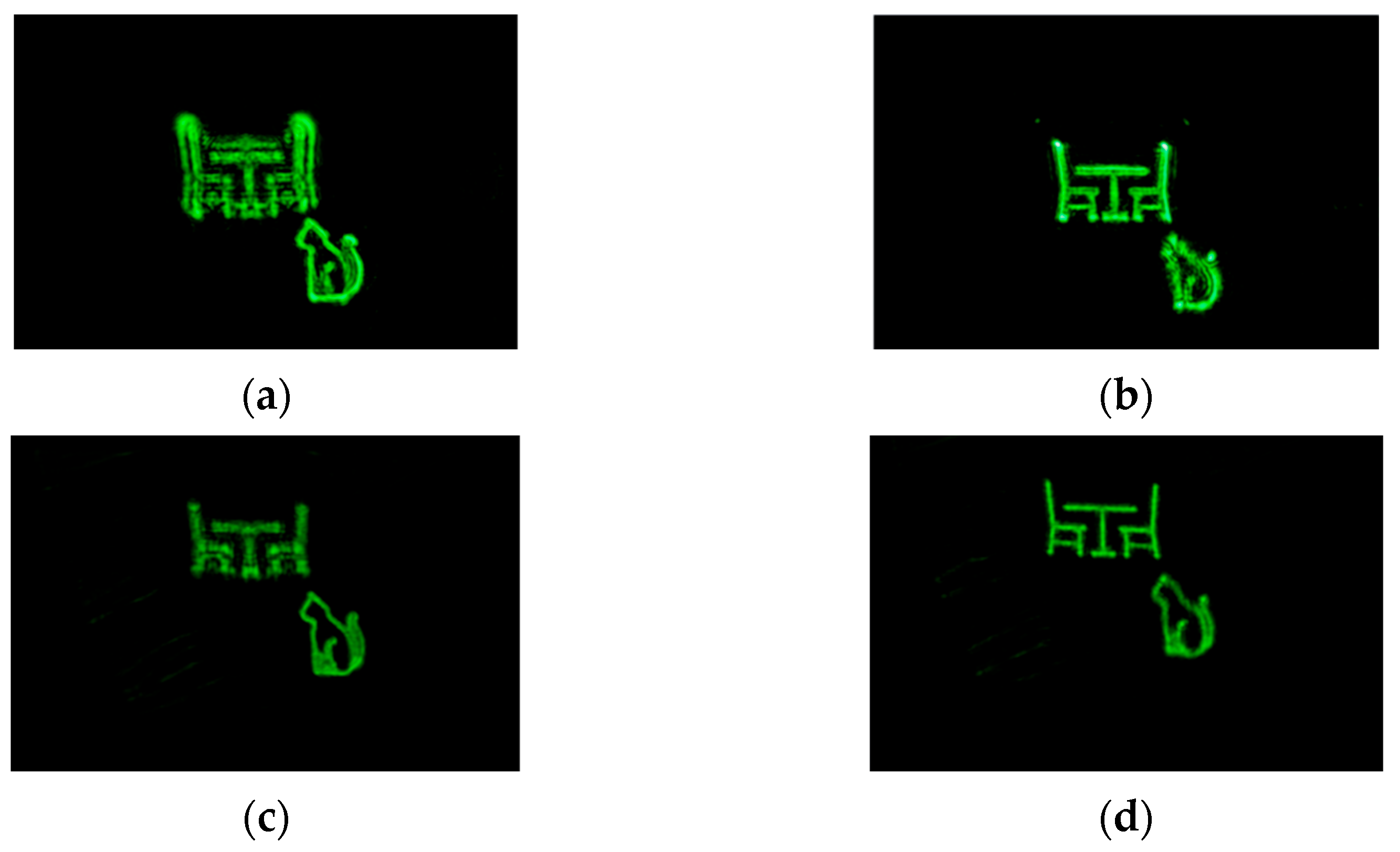
3.2. Holographic Reconstruction
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Blanche, P.A. Holography, and the future of 3D display. Light Adv. Manuf. 2021, 2, 446–459. [Google Scholar] [CrossRef]
- Huang, Z.; Memmolo, P.; Ferraro, P.; Cao, L. Dual-plane coupled phase retrieval for non-prior holographic imaging. PhotoniX 2022, 3, 3. [Google Scholar] [CrossRef]
- Wang, D.; Liu, C.; Shen, C.; Xing, Y.; Wang, Q.H. Holographic capture and projection system of real object based on tunable zoom lens. PhotoniX 2020, 1, 6. [Google Scholar] [CrossRef]
- Kim, H.; Hahn, J.; Lee, B. Mathematical modeling of triangle-mesh-modeled three-dimensional surface objects for digital holography. Appl. Opt. 2008, 47, D117–D127. [Google Scholar] [CrossRef] [PubMed]
- Pan, Y.; Wang, Y.; Liu, J.; Li, X.; Jia, J. Fast polygon-based method for calculating computer-generated holograms in three-dimensional display. Appl. Opt. 2013, 52, A290–A299. [Google Scholar] [CrossRef]
- Zhang, Y.P.; Wang, F.; Poon, T.C.; Fan, S.; Xu, W. Fast generation of full analytical polygon-based computer-generated holograms. Opt. Express 2018, 26, 19206–19224. [Google Scholar] [CrossRef] [PubMed]
- Bayraktar, M.; Özcan, M. Method to calculate the far field of three-dimensional objects for computer-generated holography. Appl. Opt. 2010, 49, 4647–4654. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Cao, L.; Jin, G. Computer-generated hologram with occlusion effect using layer-based processing. Appl. Opt. 2017, 56, F138–F143. [Google Scholar] [CrossRef]
- Chen, J.S.; Chu, D.P. Improved layer-based method for rapid hologram generation and real-time interactive holographic display applications. Opt. Express 2015, 23, 18143–18155. [Google Scholar] [CrossRef]
- Dong, D.; Wang, Y.; Kadis, A.; Wilkinson, T.D. Cost-optimized heterogeneous FPGA architecture for non-iterative hologram generation. Appl. Opt. 2020, 59, 7540–7546. [Google Scholar] [CrossRef]
- Zeng, T.; Zhu, Y.; Lam, E.Y. Deep learning for digital holography: A review. Opt. Express 2021, 29, 40572–40593. [Google Scholar] [CrossRef] [PubMed]
- Yolalmaz, A.; Yüce, E. Comprehensive deep learning model for 3D color holography. Sci. Rep. 2022, 12, 2487. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Qin, Z.; Huang, L.; Li, Y.; Zhao, R.; Zhou, H.; He, H.; Zhang, J.; Qu, S. Metasurface with dynamic chiral meta-atoms for spin multiplexing hologram and low observable reflection. PhotoniX 2022, 3, 10. [Google Scholar] [CrossRef]
- Bianco, V.; Memmolo, P.; Leo, M.; Montresor, S.; Distante, C.; Paturzo, M.; Ferraro, P. Strategies for reducing speckle noise in digital holography. Light Sci. Appl. 2018, 7, 48. [Google Scholar] [CrossRef] [PubMed]
- Gao, C.; Liu, J.; Li, X.; Xue, G.; Jia, J.; Wang, Y. Accurate compressed look up table method for CGH in 3D holographic display. Opt. Express 2015, 23, 33194–33204. [Google Scholar] [CrossRef]
- Zheng, Y.W.; Wang, D.; Li, Y.L.; Li, N.N.; Wang, Q.H. Holographic near-eye display system with large viewing area based on liquid crystal axicon. Opt. Express 2022, 30, 34106–34116. [Google Scholar] [CrossRef]
- Wang, D.; Li, N.N.; Li, Y.L.; Zheng, Y.W.; Nie, Z.Q.; Li, Z.S.; Chu, F.; Wang, Q.H. Large viewing angle holographic 3D display system based on maximum diffraction modulation. Light Adv. Manuf. 2023, 4, 18. [Google Scholar] [CrossRef]
- Wang, D.; Li, Z.S.; Zheng, Y.W.; Li, N.N.; Li, Y.L.; Wang, Q.H. High-quality holographic 3D display system based on virtual splicing of spatial light modulator. ACS Photonics 2023, 10, 2297–2307. [Google Scholar] [CrossRef]
- Zhang, S.; Huang, L.; Li, X.; Zhao, R.; Wei, Q.; Zhou, H.; Wang, Y. Dynamic display of full-Stokes vectorial holography based on metasurfaces. ACS Photonics 2021, 8, 1746–1753. [Google Scholar] [CrossRef]
- Lin, A.; Wang, J.; Chen, Y.; Qi, P.; Huang, Z.; Tan, X. Reconstruction characters of conventional holography using polarization-sensitive material. Appl. Opt. 2022, 61, 3134–3140. [Google Scholar] [CrossRef]
- Shi, L.; Li, B.; Matusik, W. End-to-end learning of 3d phase-only holograms for holographic display. Light Sci. Appl. 2022, 11, 247. [Google Scholar] [CrossRef] [PubMed]
- Wang, D.; Li, N.N.; Li, Y.L.; Zheng, Y.W.; Wang, Q.H. Curved hologram generation method for speckle noise suppression based on the stochastic gradient descent algorithm. Opt. Express 2021, 29, 42650–42662. [Google Scholar] [CrossRef]
- Zhang, Y.; Fan, H.; Wang, F.; Gu, X.; Qian, X.; Poon, T.C. Polygon-based computer-generated holography: A review of fundamentals and recent progress. Appl. Opt. 2022, 61, B363–B374. [Google Scholar] [CrossRef] [PubMed]
- Pi, D.; Liu, J.; Wang, Y. Review of computer-generated hologram algorithms for color dynamic holographic three-dimensional display. Light Sci. Appl. 2022, 11, 231. [Google Scholar] [CrossRef] [PubMed]
- Lucente, M. Interactive computation of holograms using a look-up table. J. Electron. Imaging 1993, 2, 28–34. [Google Scholar] [CrossRef]
- TShimobaba; Nakayama, H.; Masuda, N.; Ito, T. Simple and fast calculation algorithm for computer-generated hologram with wavefront recording plane. Opt. Lett. 2009, 34, 3133–3135. [Google Scholar] [CrossRef] [PubMed]
- Kim, S.C.; Kim, E.S. Effective generation of digital holograms of three-dimensional objects using a novel look-up table method. Appl. Opt. 2008, 47, D55–D62. [Google Scholar] [CrossRef] [PubMed]
- Pan, Y.; Xu, X.; Solanki, S.; Liang, X.; Tanjung, R.B.A.; Tan, C.; Chong, T.C. Fast CGH computation using S-LUT on GPU. Opt. Express 2009, 17, 18543–18555. [Google Scholar] [CrossRef]
- Jia, J.; Wang, Y.; Liu, J.; Li, X.; Pan, Y.; Sun, Z.; Jiang, W. Reducing the memory usage for effectivecomputer-generated hologram calculation using compressed look-up table in full-color holographic display. Appl. Opt. 2013, 52, 1404–1412. [Google Scholar] [CrossRef]
- Tsang, P.W.M.; Poon, T.C.; Wu, Y.M. Review of fast methods for point-based computer-generated holography. Photonics Res. 2018, 6, 837–846. [Google Scholar] [CrossRef]
- Nishitsuji, T.; Shimobaba, T.; Kakue, T.; Ito, T. Review of fast calculation techniques for computer-generated holograms with the point-light-source-based model. IEEE T. Ind. Inform. 2017, 13, 2447–2454. [Google Scholar] [CrossRef]
- Shimobaba, T.; Nakayama, H.; Masuda, N.; Ito, T. Rapid calculation algorithm of Fresnel computer-generated-hologram using look-up table and wavefront-recording plane methods for three-dimensional display. Opt. Express 2010, 18, 19504–19509. [Google Scholar] [CrossRef] [PubMed]
- Wei, L.; Sakamoto, Y. Fast calculation method with foveated rendering for computer-generated holograms using an angle-changeable ray-tracing method. Appl. Opt. 2019, 58, A258–A266. [Google Scholar] [CrossRef] [PubMed]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Resolution of the Object | Calculation Time of the Hologram (s) | Average Calculation Time for an Object Point (ms) |
|---|---|---|---|
| NLUT method | 300 × 300 | 1006.070 | 11.179 |
| 350 × 350 | 1431.290 | 11.684 | |
| 400 × 400 | 1892.773 | 11.830 | |
| 450 × 450 | 2209.453 | 10.911 | |
| 500 × 500 | 2958.002 | 11.832 | |
| Proposed method | 300 × 300 | 468.058 | 5.200 |
| 350 × 350 | 638.831 | 5.215 | |
| 400 × 400 | 885.600 | 5.535 | |
| 450 × 450 | 1135.049 | 5.605 | |
| 500 × 500 | 1515.477 | 6.062 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Li, Y.; Tang, Z.; Li, Z.; Wang, D. Fast Hologram Calculation Method Based on Wavefront Precise Diffraction. Micromachines 2023, 14, 1690. https://doi.org/10.3390/mi14091690
Wang Z, Li Y, Tang Z, Li Z, Wang D. Fast Hologram Calculation Method Based on Wavefront Precise Diffraction. Micromachines. 2023; 14(9):1690. https://doi.org/10.3390/mi14091690
Chicago/Turabian StyleWang, Zimu, Yilong Li, Zhenyan Tang, Zhaosong Li, and Di Wang. 2023. "Fast Hologram Calculation Method Based on Wavefront Precise Diffraction" Micromachines 14, no. 9: 1690. https://doi.org/10.3390/mi14091690
APA StyleWang, Z., Li, Y., Tang, Z., Li, Z., & Wang, D. (2023). Fast Hologram Calculation Method Based on Wavefront Precise Diffraction. Micromachines, 14(9), 1690. https://doi.org/10.3390/mi14091690