
Design and Analysis of XY Large Travel Micro Stage Based on Secondary Symmetric Lever Amplification
Abstract
:1. Introduction
2. Stiffness Analysis of a Two-Degrees-of-Freedom Micro-Displacement Stage
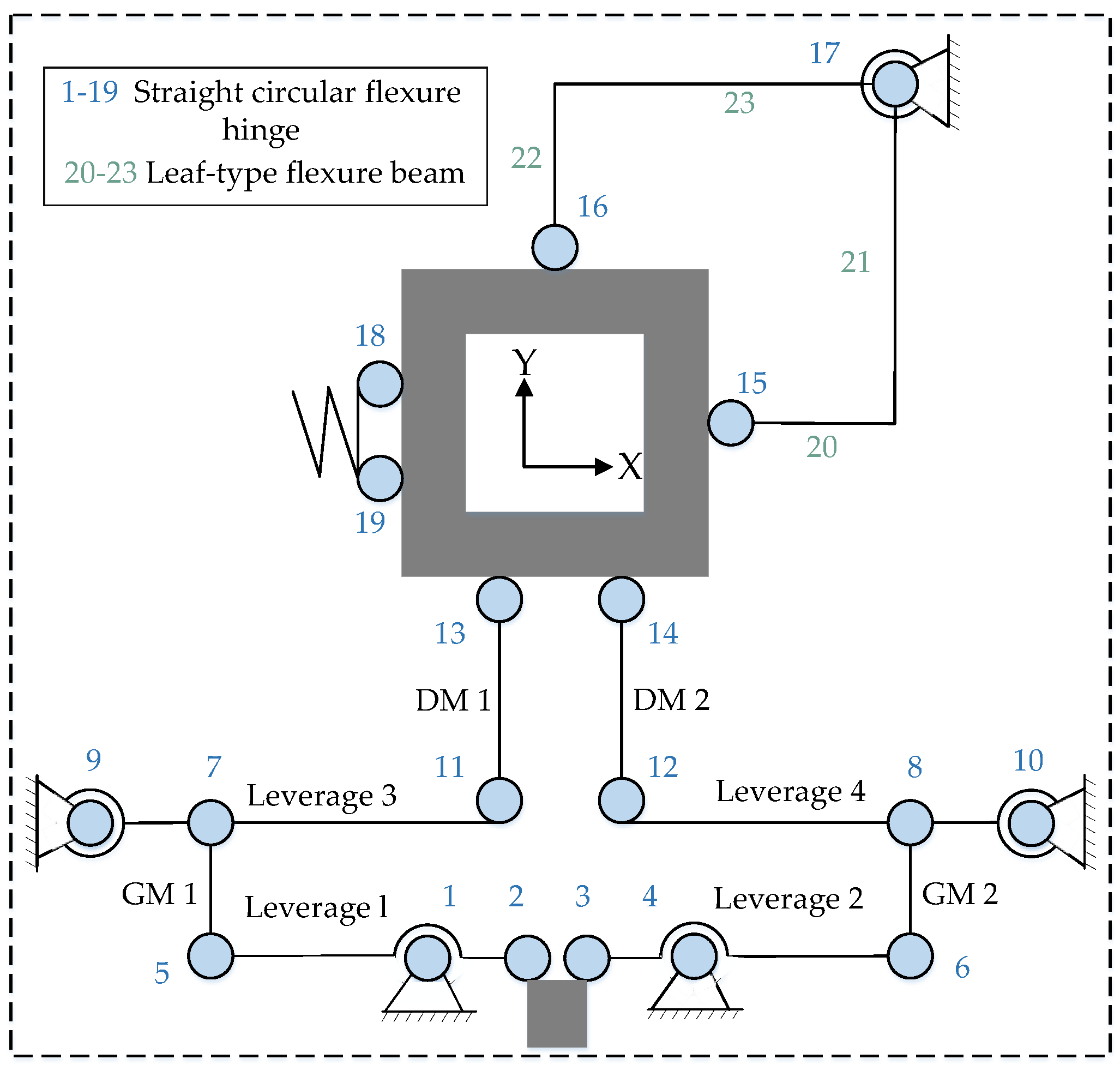
Structural Design of a Two-Degrees-of-Freedom Micro-Displacement Stage
3. Analytical Modeling of Micro-Displacement Platforms
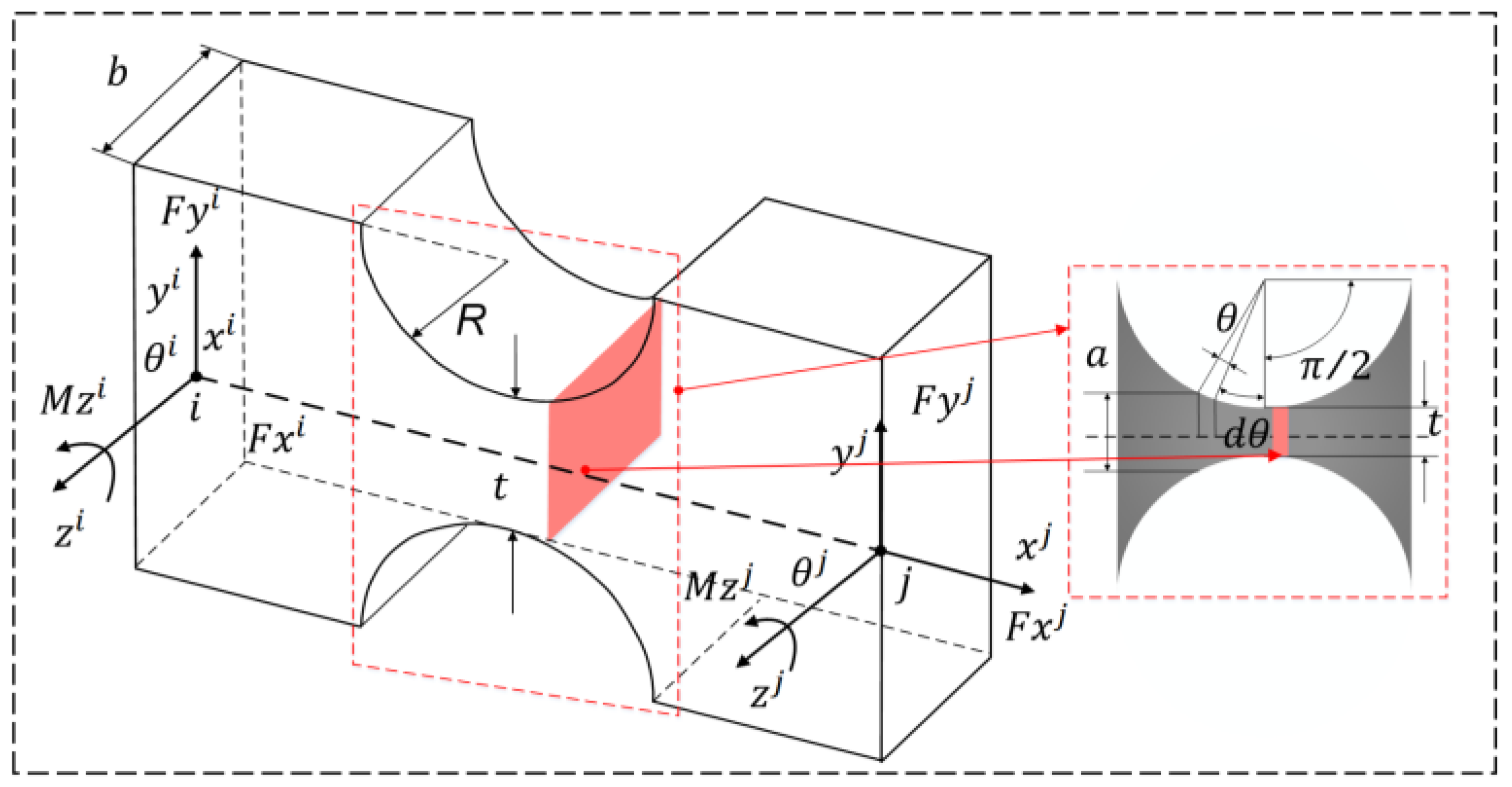
3.1. Output Stiffness Analysis
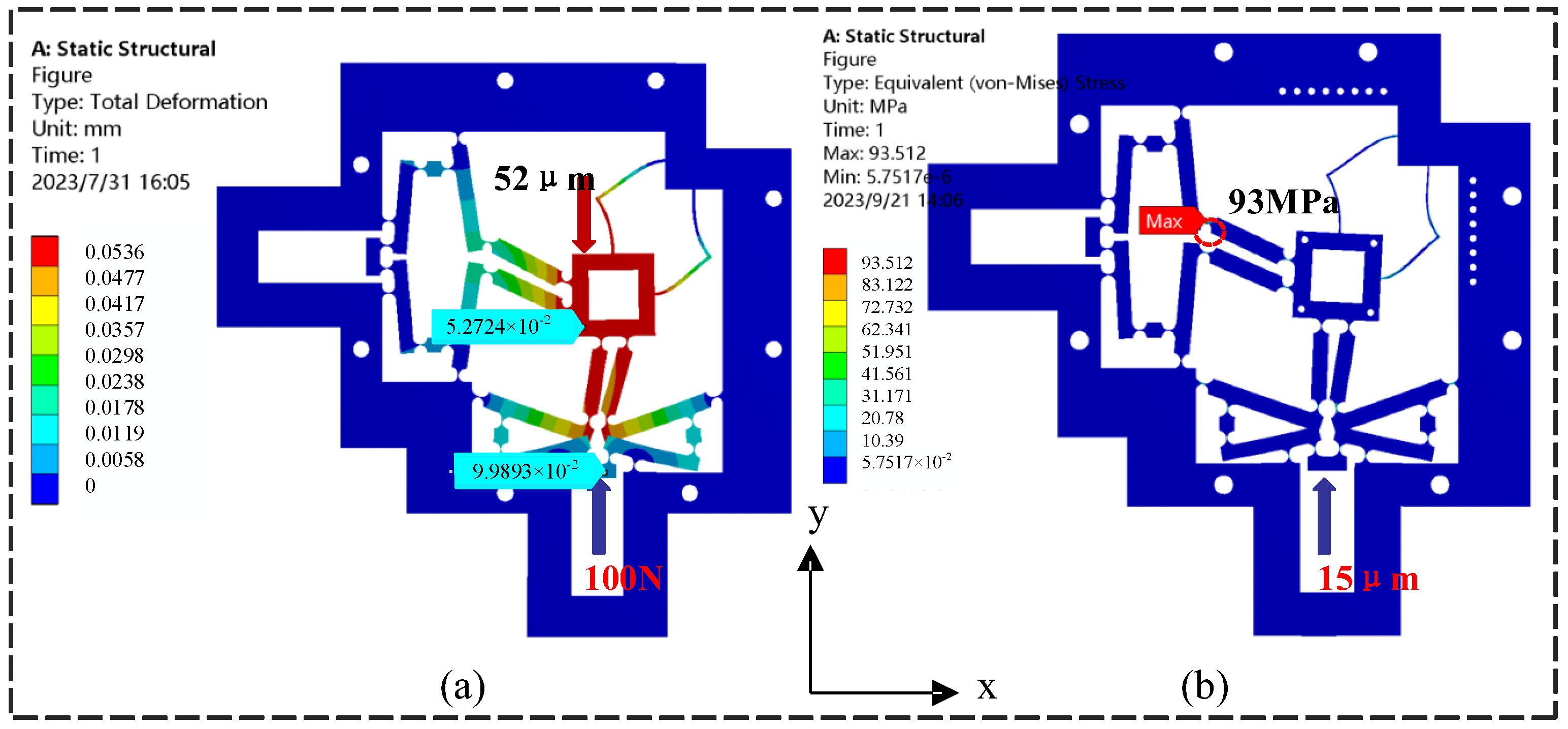
3.2. Static Analysis
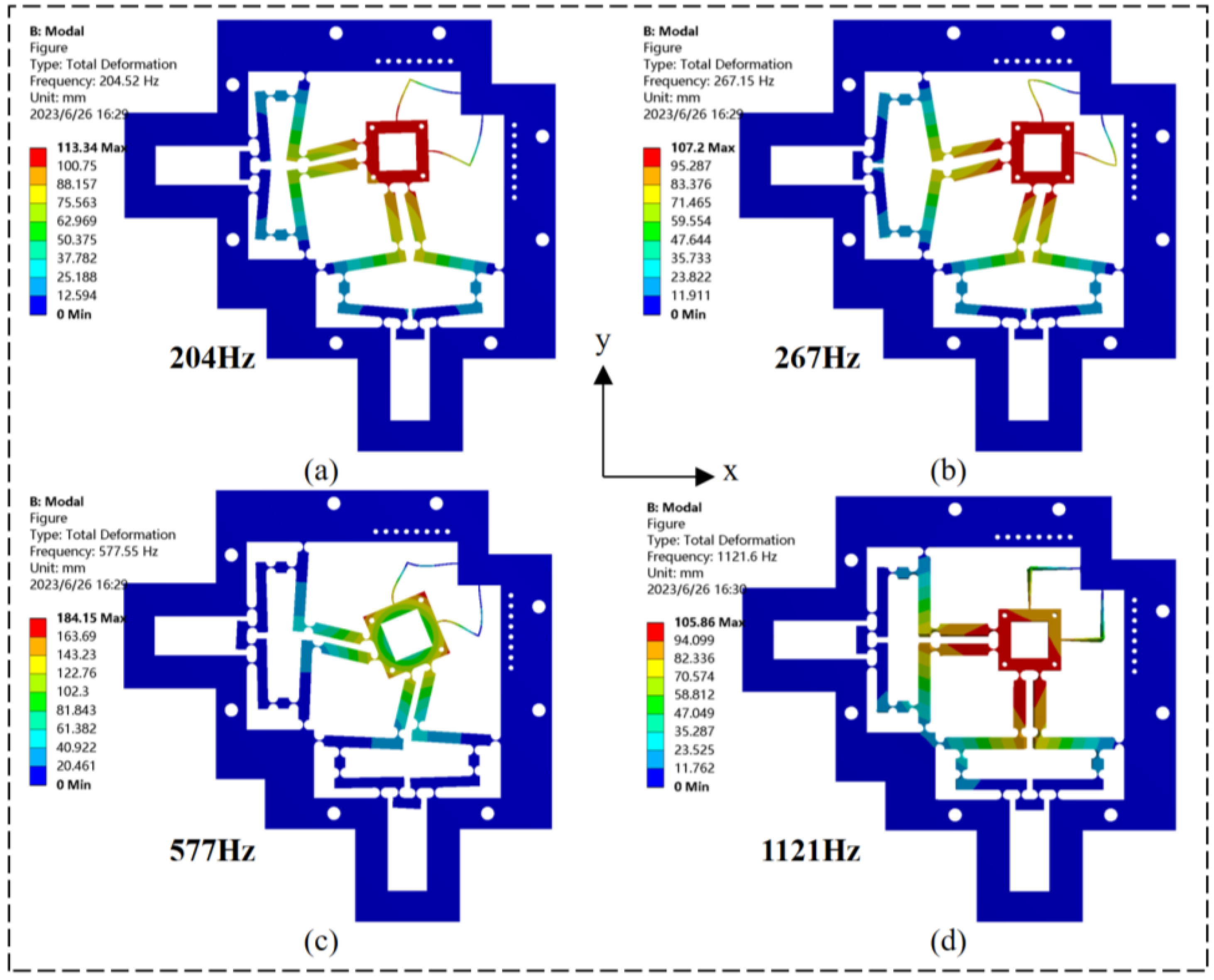
3.3. Dynamic Analysis
4. FEA Validation of Micro-Displacement Platforms
4.1. Static Analysis Validation
4.2. Dynamic Analysis and Validation
5. Experimental Study of Micro-Displacement Platforms
5.1. Experimental Setups
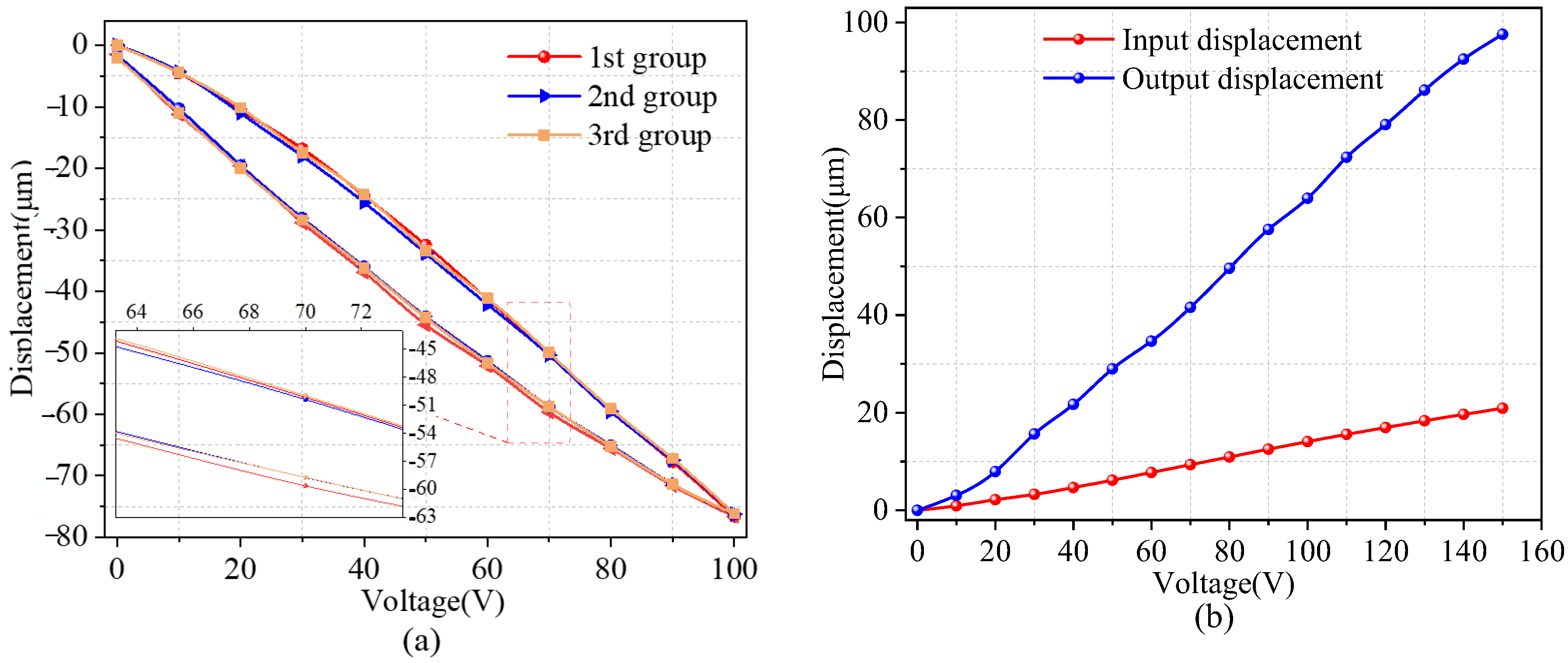
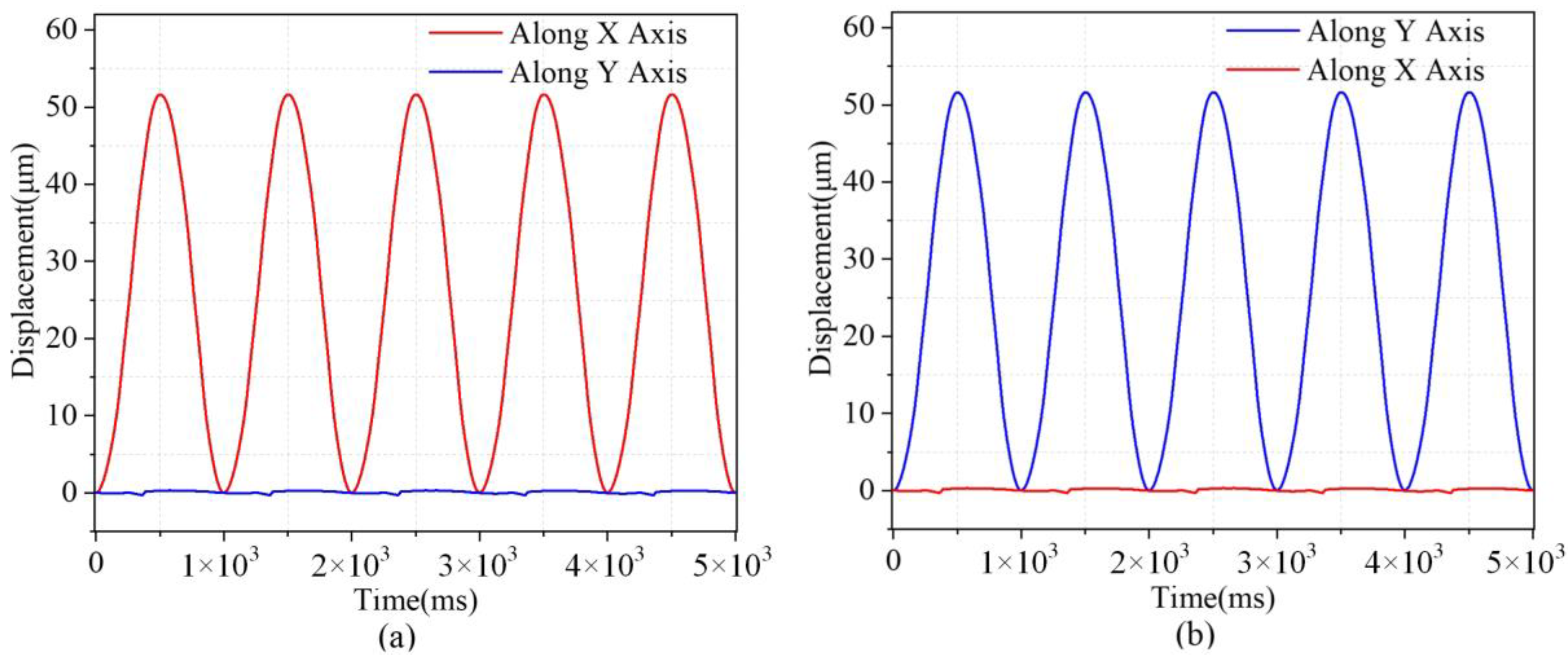
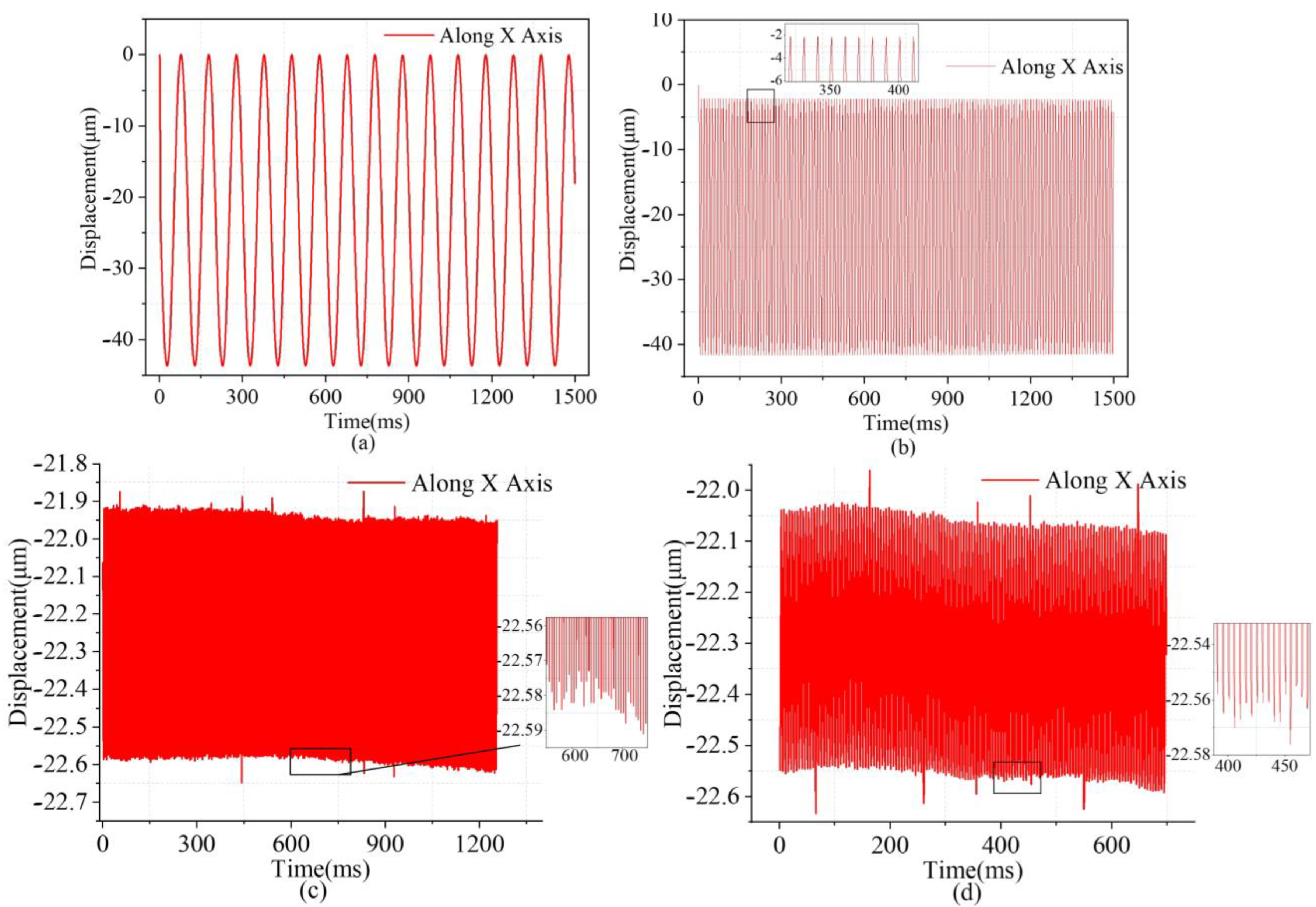
5.2. Open-Loop Experiments
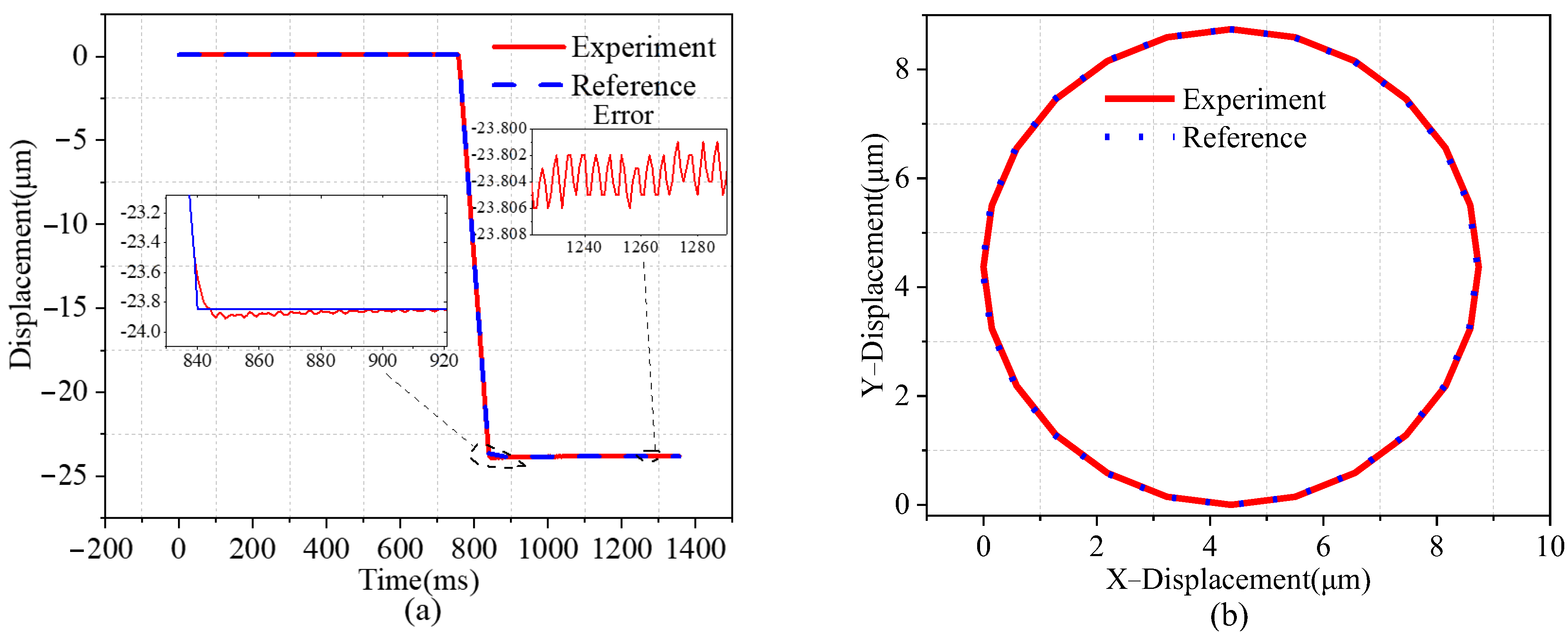
5.3. Closed-Loop Experiments
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, Y.; Huang, J.; Tang, H. A Compliant Parallel XY Micromotion Stage with Complete Kinematic Decoupling. IEEE Trans. Autom. Sci. Eng. 2012, 9, 538–553. [Google Scholar] [CrossRef]
- Linß, S.; Gräser, P.; Räder, T.; Henning, S.; Theska, R.; Zentner, L. Influence of geometric scaling on the elasto-kinematic properties of flexure hinges and compliant mechanisms. Mech. Mach. Theory 2018, 125, 220–239. [Google Scholar] [CrossRef]
- Wei, H.; Shirinzadeh, B.; Tang, H.; Niu, X. Closed-form compliance equations for elliptic-revolute notch type multiple-axis flexure hinges. Mech. Mach. Theory 2021, 156, 104–154. [Google Scholar] [CrossRef]
- Qin, Y.; Tian, Y.; Zhang, D.; Shirinzadeh, B.; Fatikow, S. A Novel Direct Inverse Modeling Approach for Hysteresis Compensation of Piezoelectric Actuator in Feedforward Applications. IEEE/ASME Trans. Mechatron. 2013, 18, 981–989. [Google Scholar] [CrossRef]
- Dong, W.; Sun, L.; Du, Z. Stiffness research on a high-precision, large-workspace parallel mechanism with compliant joints. Precis. Eng. 2008, 32, 222–231. [Google Scholar] [CrossRef]
- Li, L.; Zhang, D.; Guo, S.; Qu, H. Design, modeling, and analysis of hybrid flexure hinges. Mech. Mach. Theory 2019, 131, 300–316. [Google Scholar] [CrossRef]
- Deng, J.; Liu, Y.; Li, K.; Zhang, S. Design, Modeling, and Experimental Evaluation of a Compact Piezoelectric XY Platform for Large Travel Range. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2020, 67, 863–872. [Google Scholar] [CrossRef]
- Ling, M.; Cao, J.; Li, Q.; Zhuang, J. Design, Pseudostatic Model, and PVDF-Based Motion Sensing of a Piezo-Actuated XYZ Flexure Manipulator. IEEE/ASME Trans. Mechatron. 2018, 23, 2837–2848. [Google Scholar] [CrossRef]
- Ling, M.; Cao, J.; Zeng, M.; Lin, J.; Inman, D.J. Enhanced mathematical modeling of the displacement amplification ratio for piezoelectric compliant mechanisms. Smart Mater. Struct. 2016, 25, 075022. [Google Scholar] [CrossRef]
- Wu, Z.; Xu, Q. Design, Fabrication, and Testing of a New Compact Piezo-Driven Flexure Stage for Vertical Micro/Nanopositioning. IEEE Trans. Autom. Sci. Eng. 2019, 16, 908–918. [Google Scholar] [CrossRef]
- Yang, S.; Chen, W.; Liu, J.; Chen, W. Design, analysis and testing of a novel decoupled 2-DOF flexure-based micropositioning stage. J. Micromech. Microeng. 2017, 27, 095010. [Google Scholar] [CrossRef]
- Chen, F.; Du, Z.-j.; Yang, M.; Gao, F.; Dong, W.; Zhang, D. Design and analysis of a three-dimensional bridge-type mechanism based on the stiffness distribution. Precis. Eng. 2018, 51, 48–58. [Google Scholar] [CrossRef]
- Qin, Y.; Shirinzadeh, B.; Zhang, D.; Tian, Y. Compliance modeling and analysis of statically indeterminate symmetric flexure structures. Precis. Eng. 2013, 37, 415–424. [Google Scholar] [CrossRef]
- Delibas, B.; Koc, B. Single crystal piezoelectric motor operating with both inertia and ultrasonic resonance drives. Ultrasonics 2023, 136, 107140. [Google Scholar] [CrossRef] [PubMed]
- Ma, X.; Liu, Y.; Deng, J.; Gao, X.; Cheng, J. A compact inchworm piezoelectric actuator with high speed: Design, modeling, and experimental evaluation. Mech. Syst. Signal Process. 2023, 184, 109704. [Google Scholar] [CrossRef]
- Zhang, Q.S.; Chen, X.B.; Yang, Q.; Zhang, W.J. Development and characterization of a novel piezoelectric-driven stick-slip actuator with anisotropic-friction surfaces. Int. J. Adv. Manuf. Technol. 2011, 61, 1029–1034. [Google Scholar] [CrossRef]
- Choi, K.-B.; Lee, J.J.; Hata, S. A piezo-driven compliant stage with double mechanical amplification mechanisms arranged in parallel. Sens. Actuators A Phys. 2010, 161, 173–181. [Google Scholar] [CrossRef]
- Xie, Y.; Li, Y.; Cheung, C.; Xiao, X.; Chen, X.; Wang, R. Investigation of a compliant precision positioning stage with folding function. Int. J. Adv. Manuf. Technol. 2022, 124, 3343–3358. [Google Scholar] [CrossRef]
- Choi, S.B.; Han, S.S.; Han, Y.M.; Thompson, B.S. A magnification device for precision mechanisms featuring piezoactuators and flexure hinges: Design and experimental validation. Mech. Mach. Theory 2007, 42, 1184–1198. [Google Scholar] [CrossRef]
- Wu, H.; Lai, L.; Zhang, L.; Zhu, L. A novel compliant XY micro-positioning stage using bridge-type displacement amplifier embedded with Scott-Russell mechanism. Precis. Eng. 2022, 73, 284–295. [Google Scholar] [CrossRef]
- Tian, Y.; Ma, Y.; Wang, F.; Lu, K.; Zhang, D. A novel XYZ micro/nano positioner with an amplifier based on L-shape levers and half-bridge structure. Sens. Actuators A Phys. 2020, 302, 111777. [Google Scholar] [CrossRef]
- Gao, X.; Liu, Y.; Zhang, S.; Deng, J.; Liu, J. Development of a Novel Flexure-Based XY Platform Using Single Bending Hybrid Piezoelectric Actuator. IEEE/ASME Trans. Mechatron. 2022, 27, 3977–3987. [Google Scholar] [CrossRef]
- Yuan, X.; Liu, Y.; Zou, H.; Ji, J.; Zhou, T.; Wang, W. Design and Analysis of a 2-D Piezoelectric Platform Based on Three-Stage Amplification and L-Shaped Guiding. IEEE Trans. Instrum. Meas. 2022, 71, 7505712. [Google Scholar] [CrossRef]
- Yan, L.; Jiang, A.; Jiang, F.; Liu, G.; Wang, F.; Wu, X. Design and Performance Analysis of a Micro-Displacement Worktable Based on Flexure Hinges. Micromachines 2022, 13, 518. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.-N.; Yang, F.-C.; Nguyen, V.T.T.; Nguyen, Q.M.; Huynh, N.T.; Huynh, T.T. Optimal Design for Compliant Mechanism Flexure Hinges: Bridge-Type. Micromachines 2021, 12, 1304. [Google Scholar] [CrossRef] [PubMed]
- Wu, Z.; Xu, Q. Design, optimization and testing of a compact XY parallel nanopositioning stage with stacked structure. Mech. Mach. Theory 2018, 126, 171–188. [Google Scholar] [CrossRef]
- Bhagat, U.; Shirinzadeh, B.; Clark, L.; Qin, Y.; Tian, Y.; Zhang, D. Experimental Investigation of Robust Motion Tracking Control for a 2-DOF Flexure-Based Mechanism. IEEE/ASME Trans. Mechatron. 2014, 19, 1737–1745. [Google Scholar] [CrossRef]
- Liu, M.; Zhan, J.; Zhang, X. Topology optimization of distributed flexure hinges with desired performance. Eng. Optim. 2019, 52, 405–425. [Google Scholar] [CrossRef]
- Iqbal, S.; Malik, A. A review on MEMS based micro displacement amplification mechanisms. Sens. Actuators A Phys. 2019, 300, 111666. [Google Scholar] [CrossRef]
- Qin, Y.; Tian, Y.; Zhang, D. Design and dynamic modeling of a 2-DOF decoupled flexure-based mechanism. Chin. J. Mech. Eng. 2012, 25, 688–696. [Google Scholar] [CrossRef]
- Valentini, P.P.; Cirelli, M.; Pennestrì, E. Second-order approximation pseudo-rigid model of flexure hinge with parabolic variable thickness. Mech. Mach. Theory 2019, 136, 178–189. [Google Scholar] [CrossRef]
- Watanabe, S.; Ando, T. High-speed XYZ-nanopositioner for scanning ion conductance microscopy. Appl. Phys. Lett. 2017, 111, 113106. [Google Scholar] [CrossRef]
- Liu, M.; Li, Y.; Zhan, J. Multi-Material Topology Optimization of Flexure Hinges Using Element Stacking Method. Micromachines 2022, 13, 993. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Xu, Q. A Totally Decoupled Piezo-Driven XYZ Flexure Parallel Micropositioning Stage for Micro/Nanomanipulation. IEEE Trans. Autom. Sci. Eng. 2011, 8, 265–279. [Google Scholar] [CrossRef]
- Noveanu, S.; Lobontiu, N.; Lazaro, J.; Mandru, D. Substructure compliance matrix model of planar branched flexure-hinge mechanisms: Design, testing and characterization of a gripper. Mech. Mach. Theory 2015, 91, 1–20. [Google Scholar] [CrossRef]
- Friedrich, R.; Lammering, R.; Heurich, T. Nonlinear modeling of compliant mechanisms incorporating circular flexure hinges with finite beam elements. Precis. Eng. 2015, 42, 73–79. [Google Scholar] [CrossRef]
- Lobontiu, N. Compliance-based matrix method for modeling the quasi-static response of planar serial flexure-hinge mechanisms. Precis. Eng. 2014, 38, 639–650. [Google Scholar] [CrossRef]
- Lobontiu, N.; Garcia, E. Two-axis flexure hinges with axially-collocated and symmetric notches. Comput. Struct. 2003, 81, 1329–1341. [Google Scholar] [CrossRef]
- Zhu, W.-L.; Zhu, Z.; Guo, P.; Ju, B.-F. A novel hybrid actuation mechanism based XY nanopositioning stage with totally decoupled kinematics. Mech. Syst. Signal Process. 2018, 99, 747–759. [Google Scholar] [CrossRef]
- Smith, S.T. Flexures: Elements of Elastic Mechanisms; Gordon and Breach Science Publishers: Philadelphia, PA, USA, 2000. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Para | T | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Value (unit: mm) | 10 | 10 | 0.4 | 2.5 | 0.8 | 9 | 19.6 | 10.2 | 28 | 28 | 12.3 | 16.8 |
| Anal. | 5.69 | 6.8 | 0.21 | 0.0005 | 0.001 | 98.7 MPa | 206.1 Hz |
| FEA | 5.8 | 5.56 | 0.18 | 0.0008 | 0.0013 | 93.5 MPa | 204.5 Hz |
| Error | 1.9% | 18.1% | 14.2% | 5% | 5.8% | 5.3% | 0.78% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, T.; Xiong, L.; Pan, Z.; Zhang, C.; Qu, W.; Wang, Y.; Yang, C. Design and Analysis of XY Large Travel Micro Stage Based on Secondary Symmetric Lever Amplification. Micromachines 2023, 14, 1805. https://doi.org/10.3390/mi14091805
Zhang T, Xiong L, Pan Z, Zhang C, Qu W, Wang Y, Yang C. Design and Analysis of XY Large Travel Micro Stage Based on Secondary Symmetric Lever Amplification. Micromachines. 2023; 14(9):1805. https://doi.org/10.3390/mi14091805
Chicago/Turabian StyleZhang, Tao, Liuguang Xiong, Zequan Pan, Chunhua Zhang, Wen Qu, Yuhang Wang, and Chunmei Yang. 2023. "Design and Analysis of XY Large Travel Micro Stage Based on Secondary Symmetric Lever Amplification" Micromachines 14, no. 9: 1805. https://doi.org/10.3390/mi14091805