
Signal Denoising Method Based on EEMD and SSA Processing for MEMS Vector Hydrophones


Abstract
:1. Introduction
2. Methodology
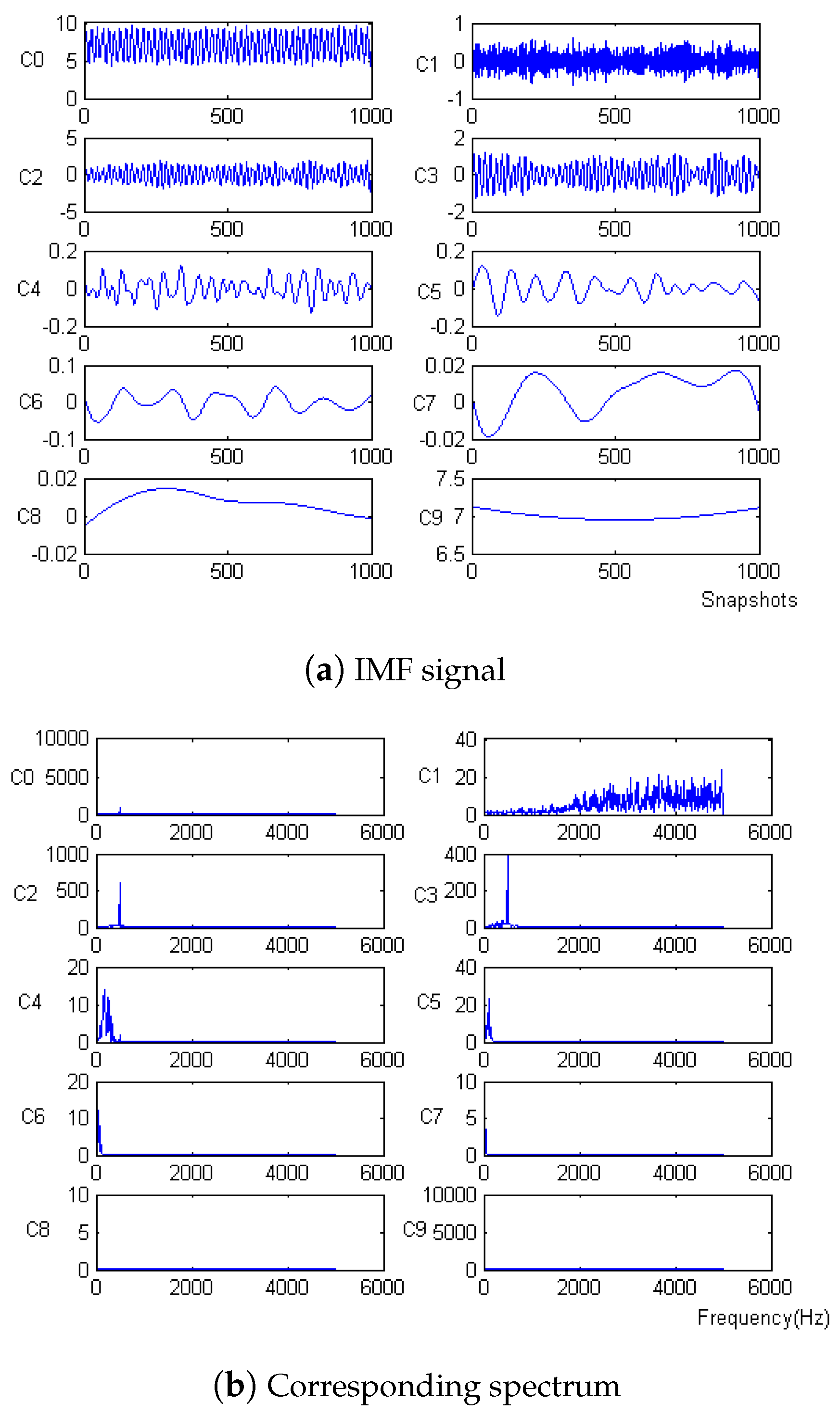
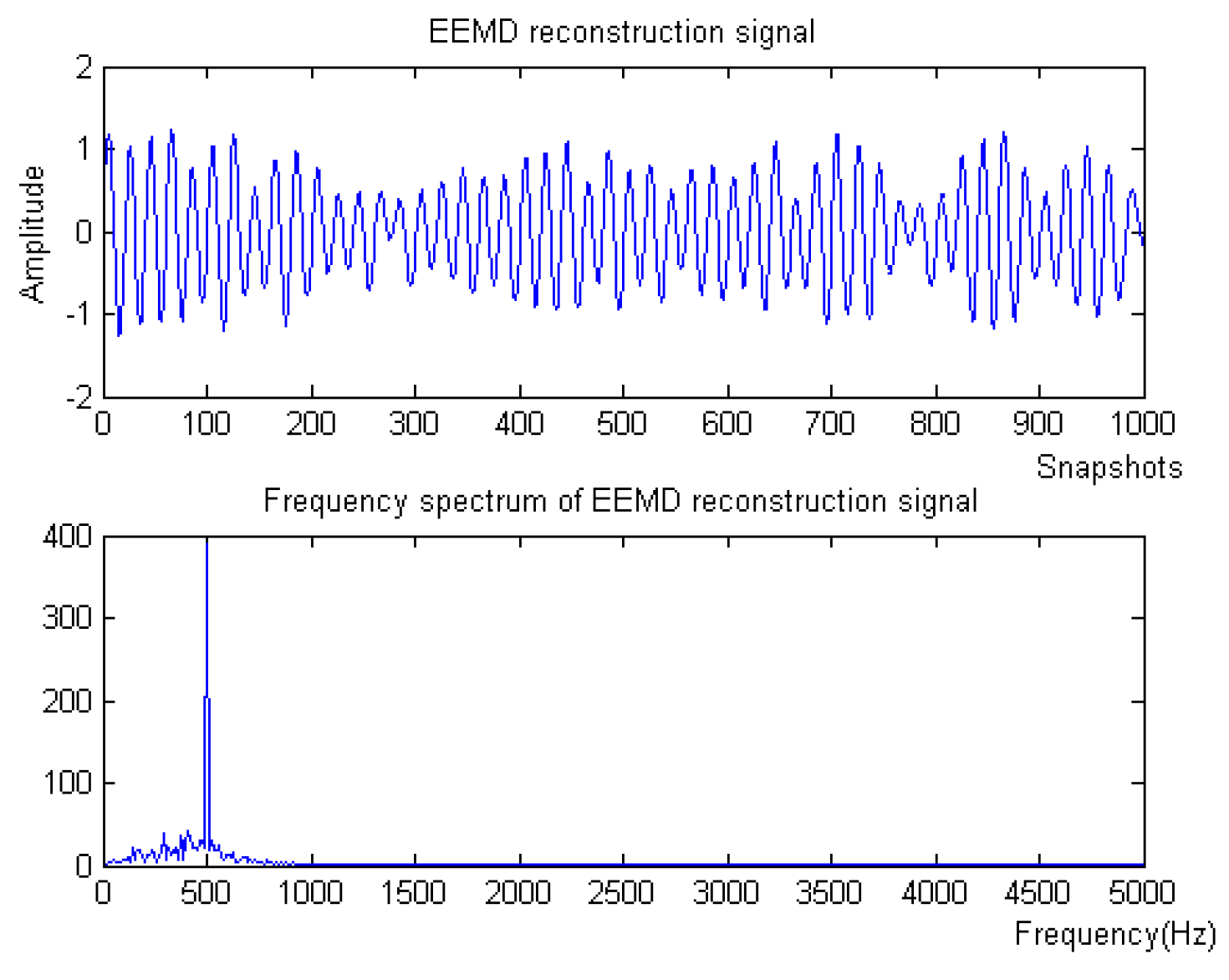
2.1. Ensemble Empirical Mode Decomposition
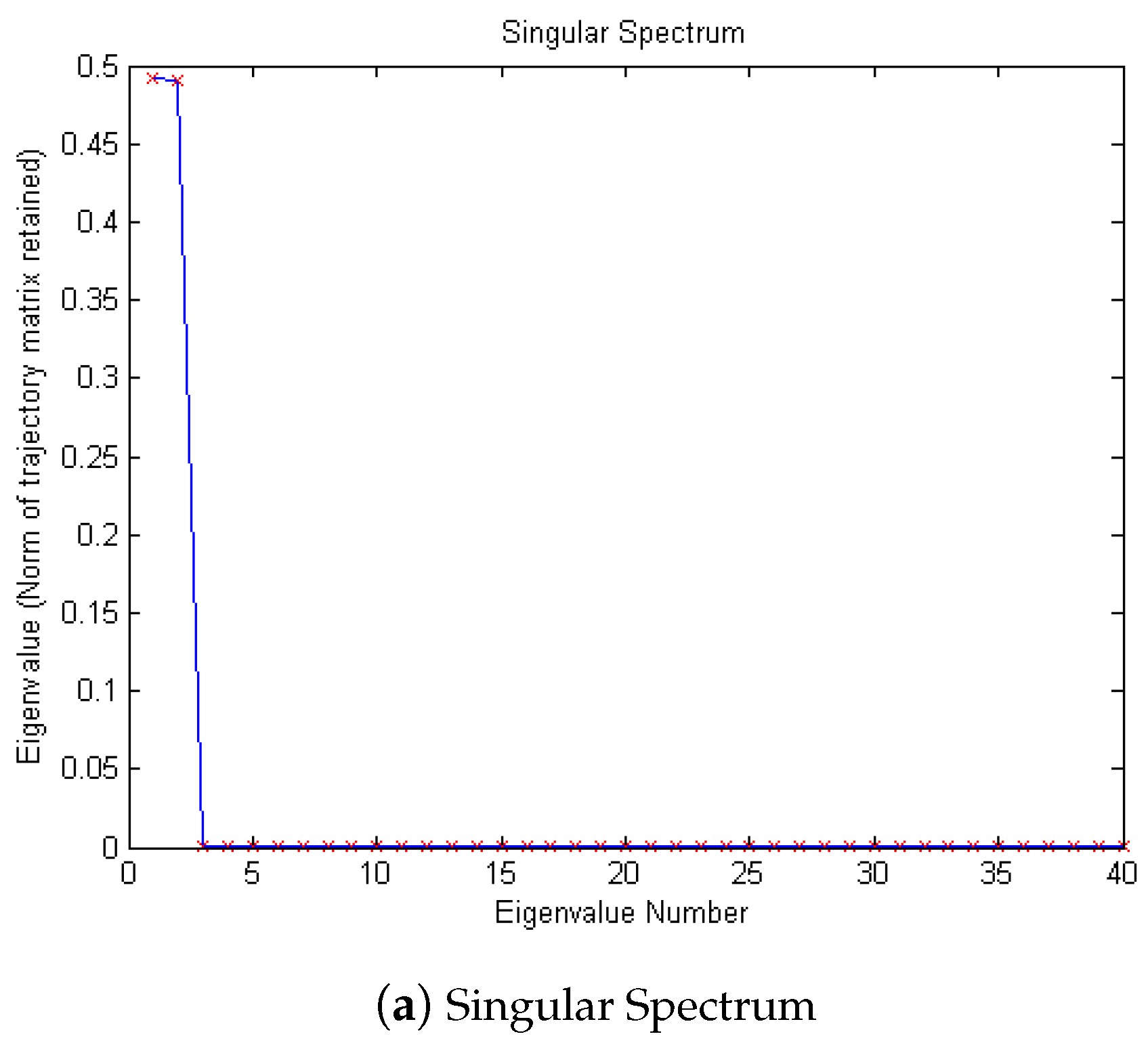
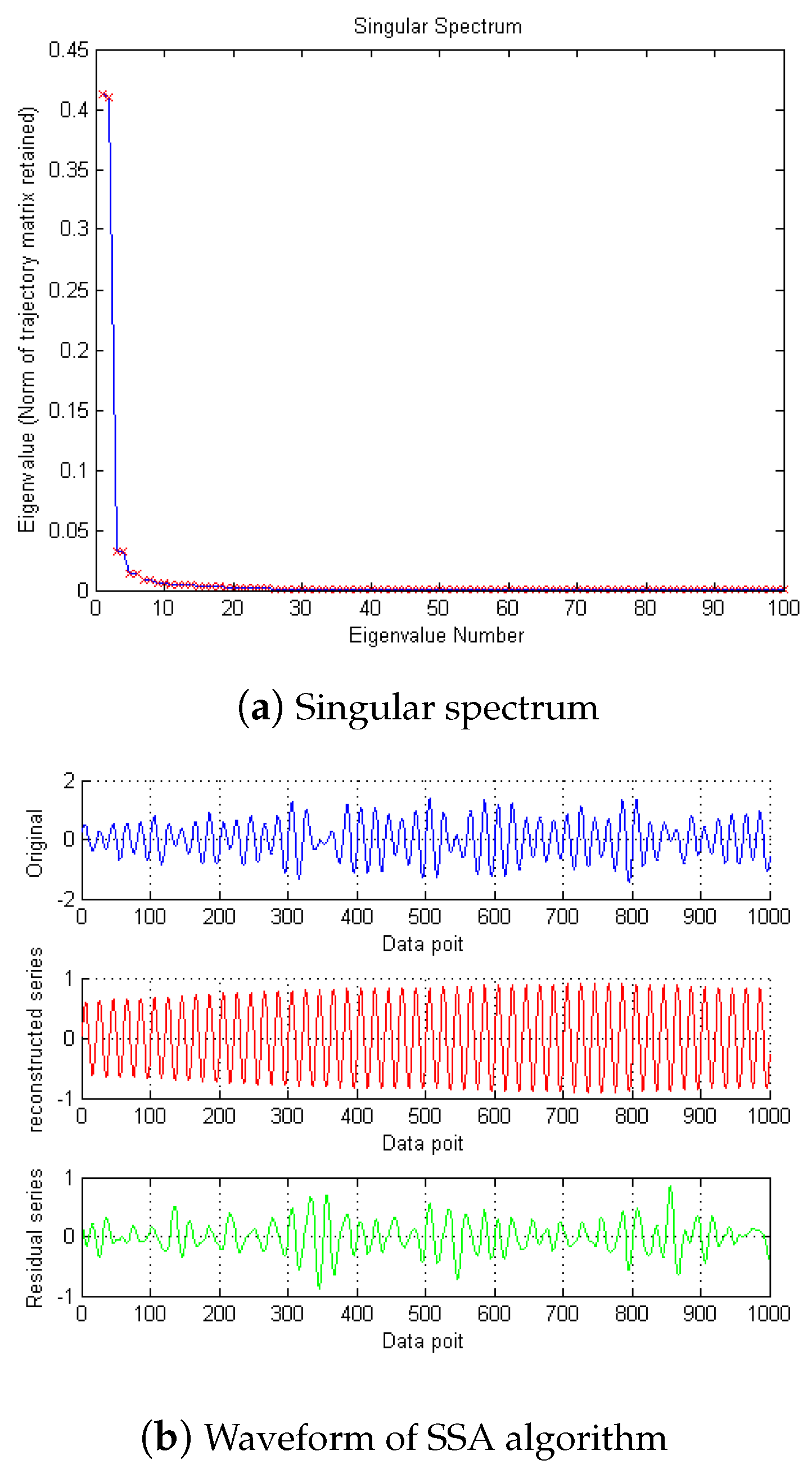
2.2. Singular Spectrum Analysis
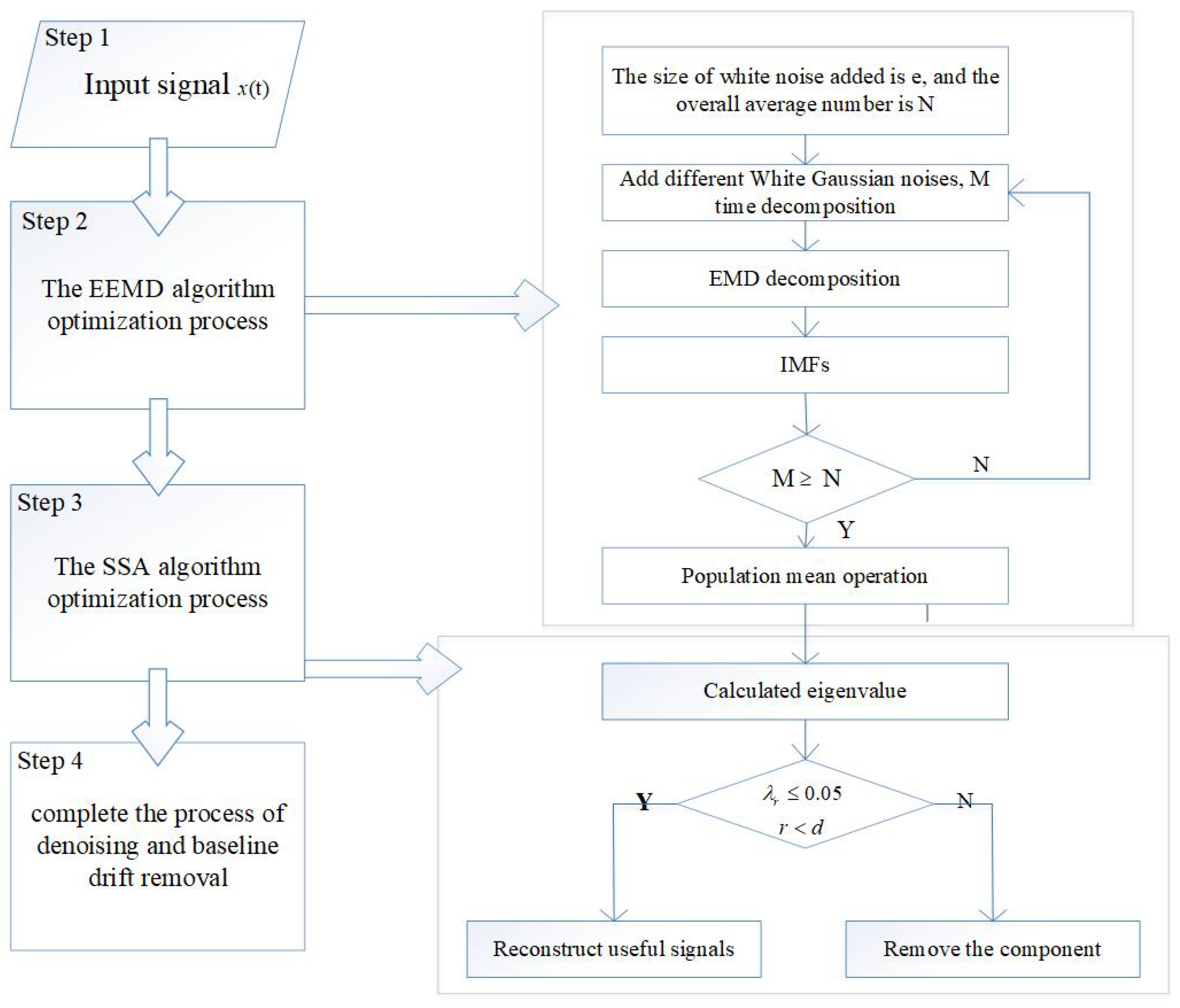
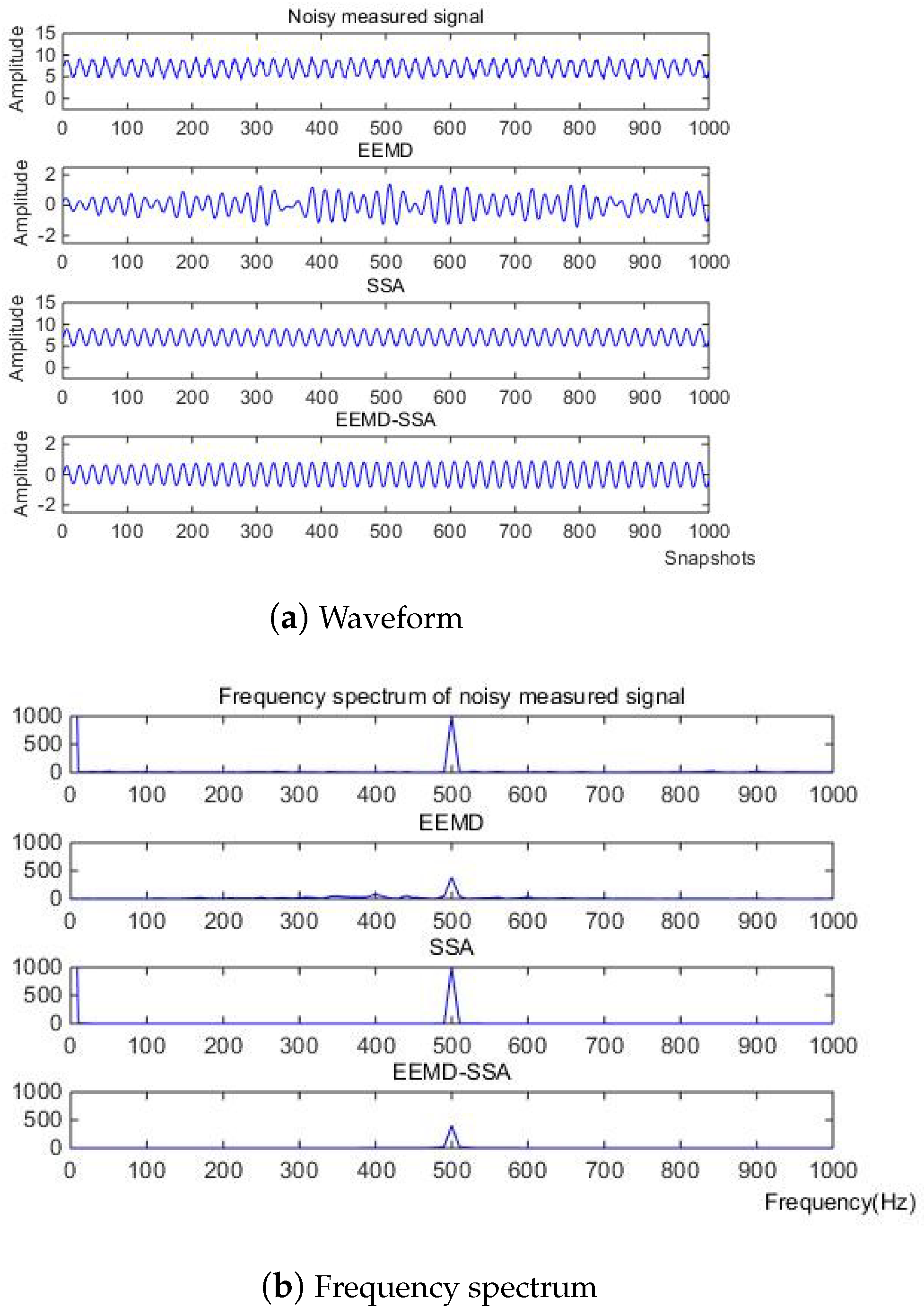
2.3. Ensemble Empirical Mode Decomposition—Singular Spectrum Analysis
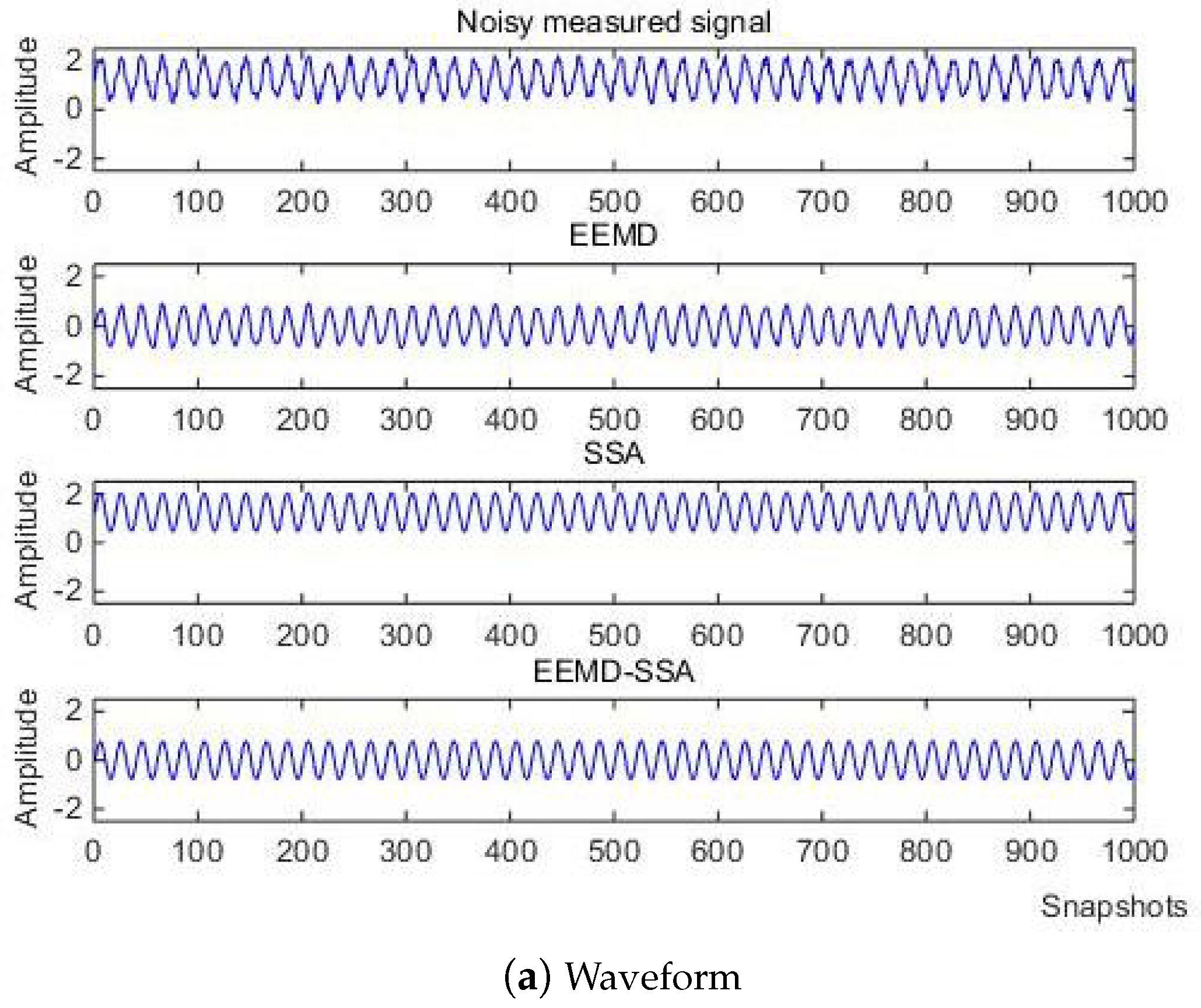
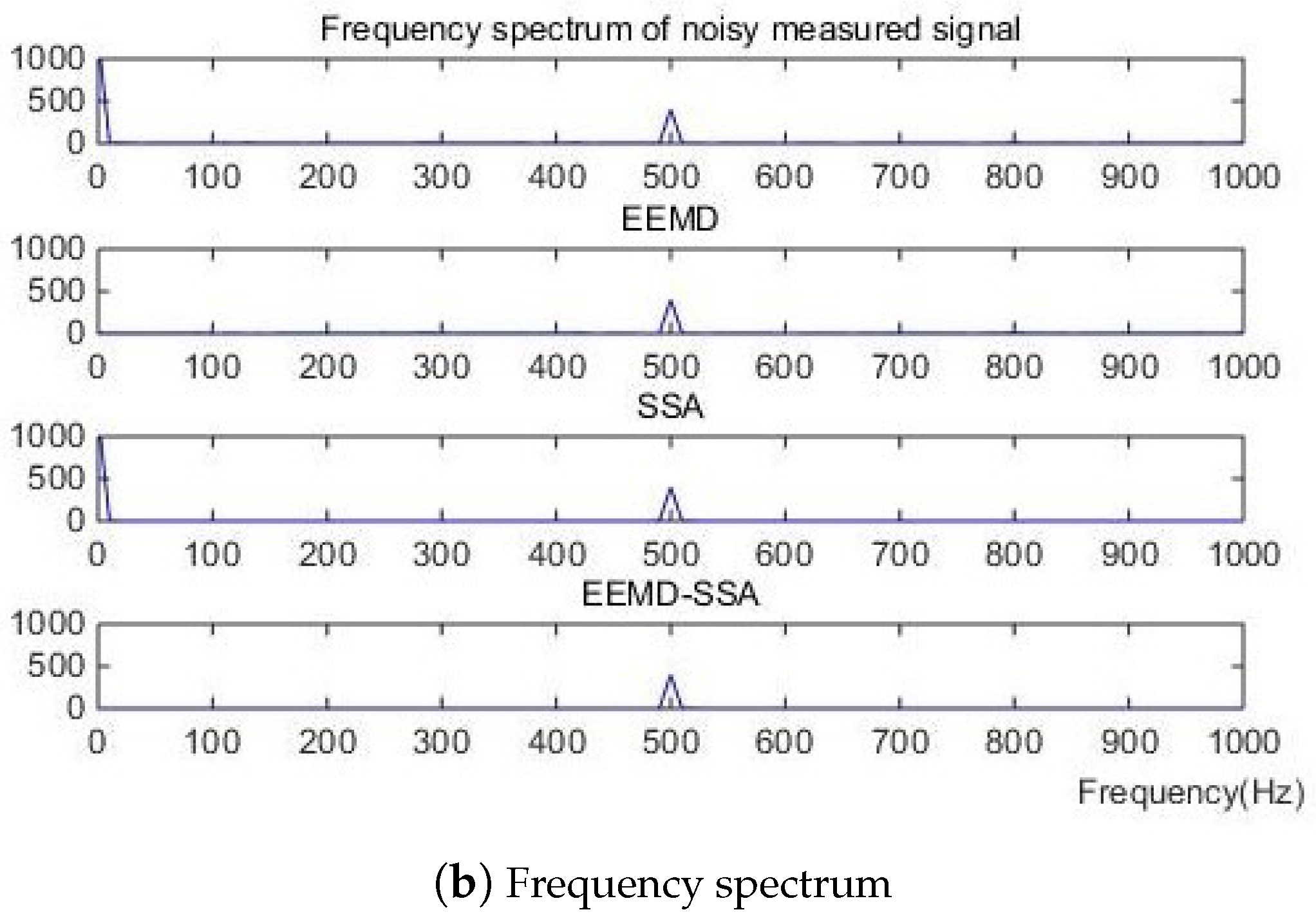
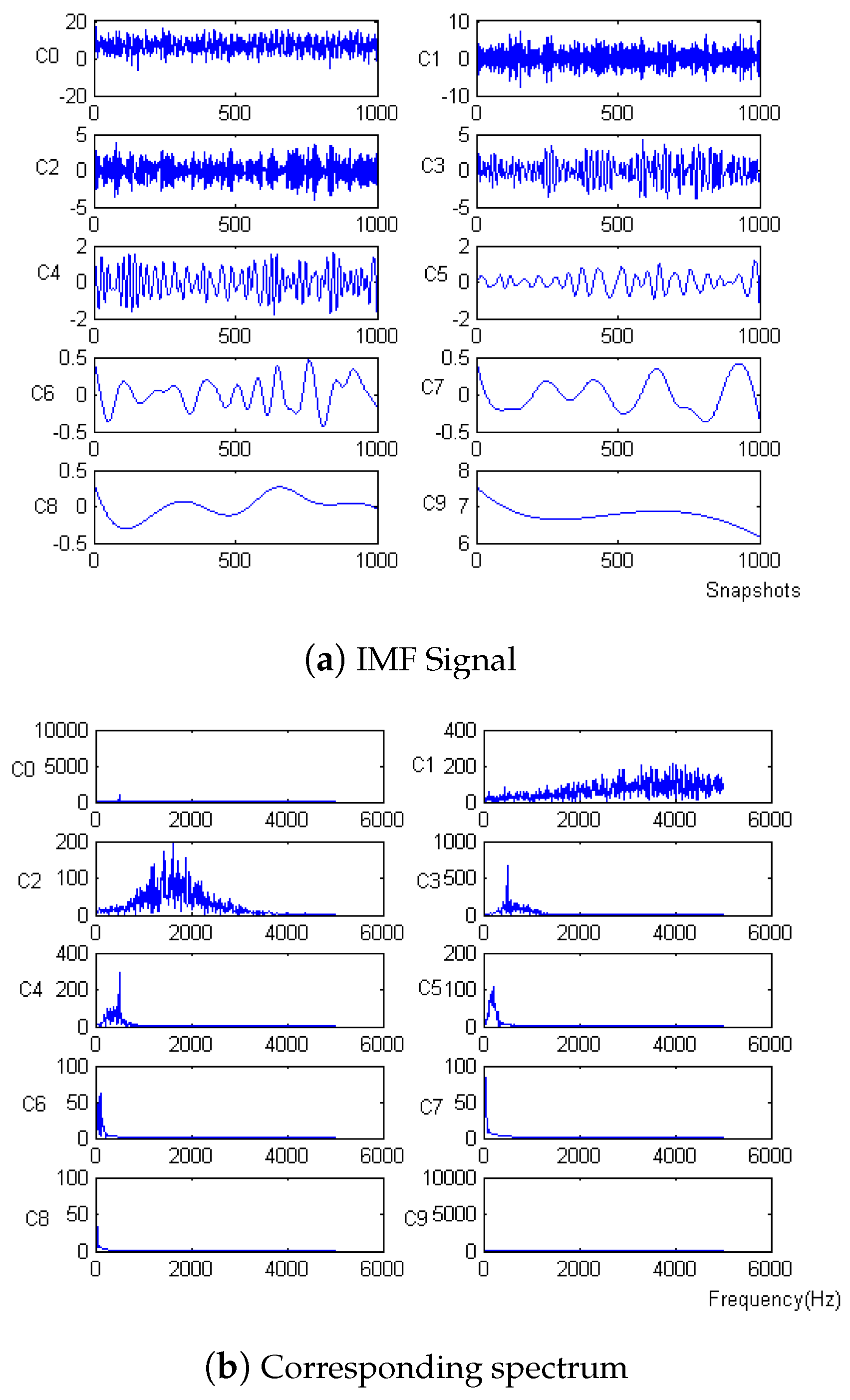
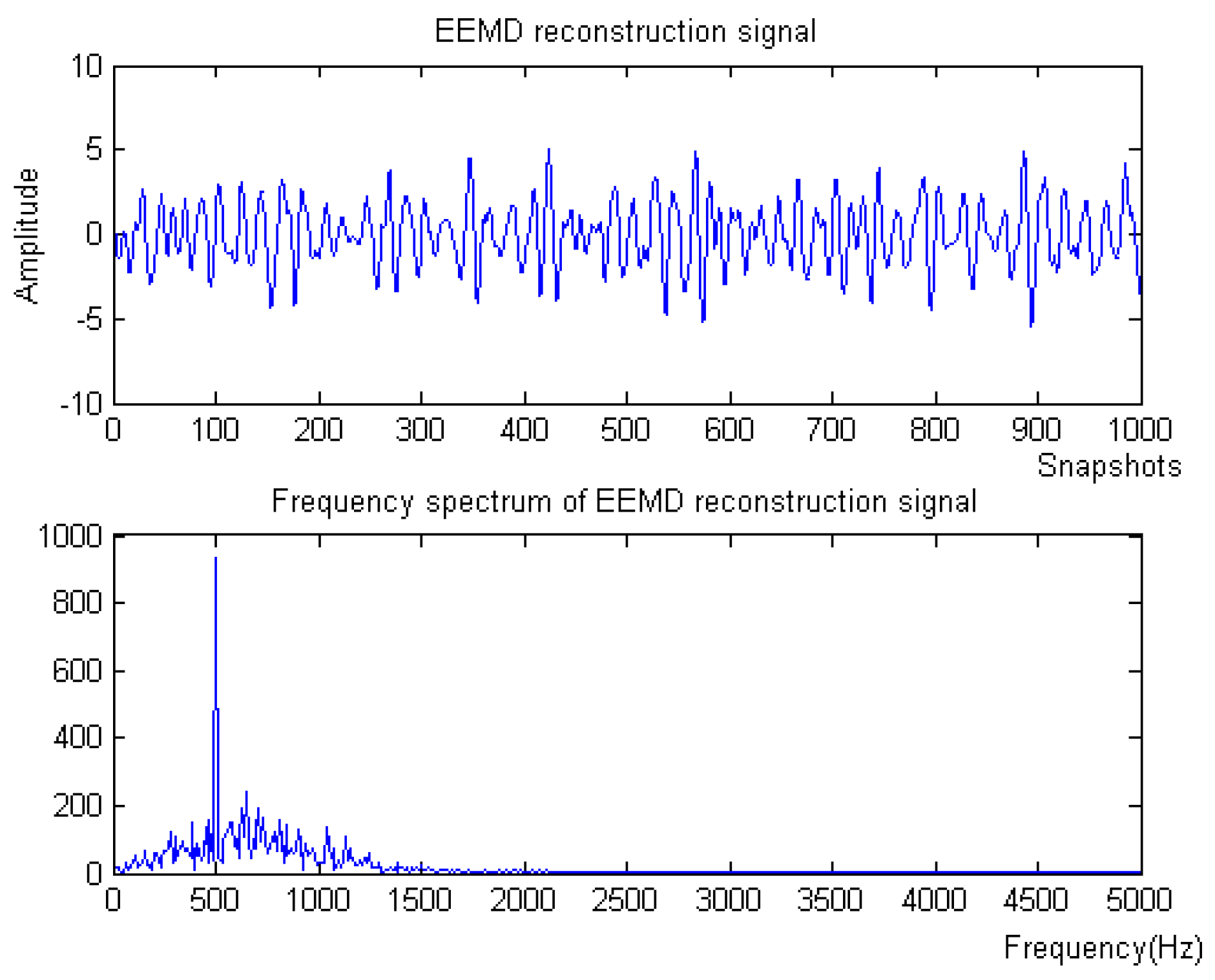
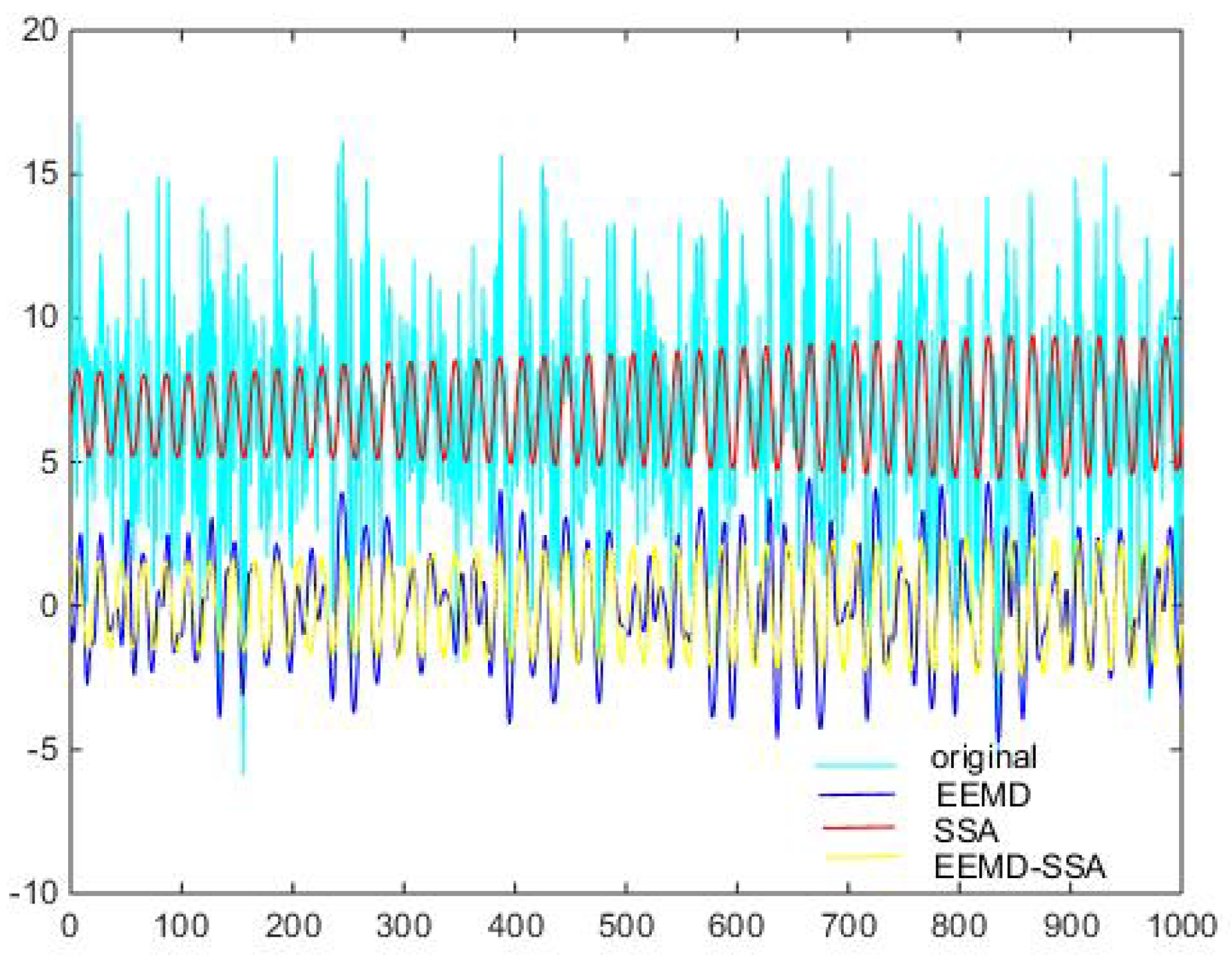
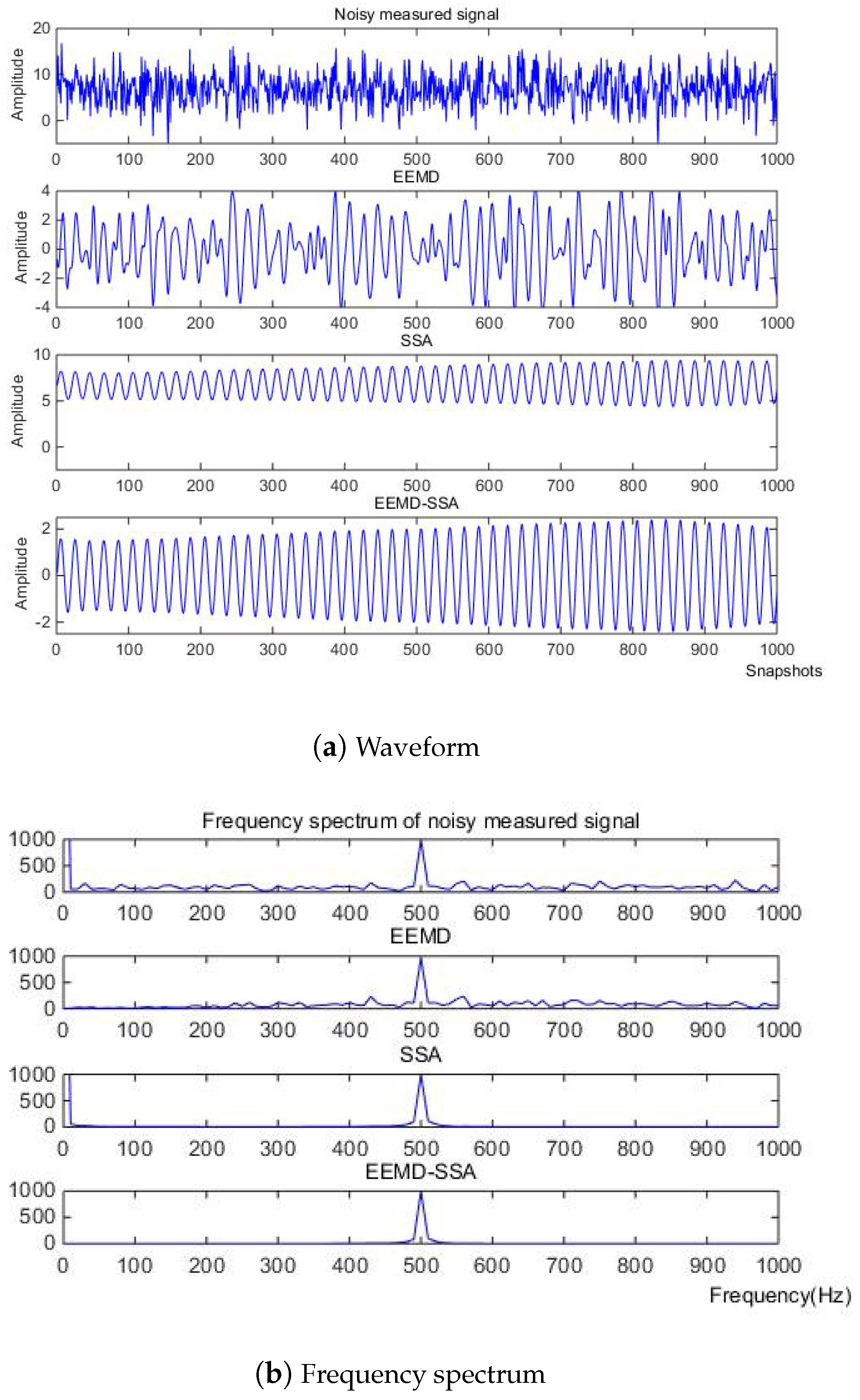
3. Simulation
3.1. Simulation Experiment 1
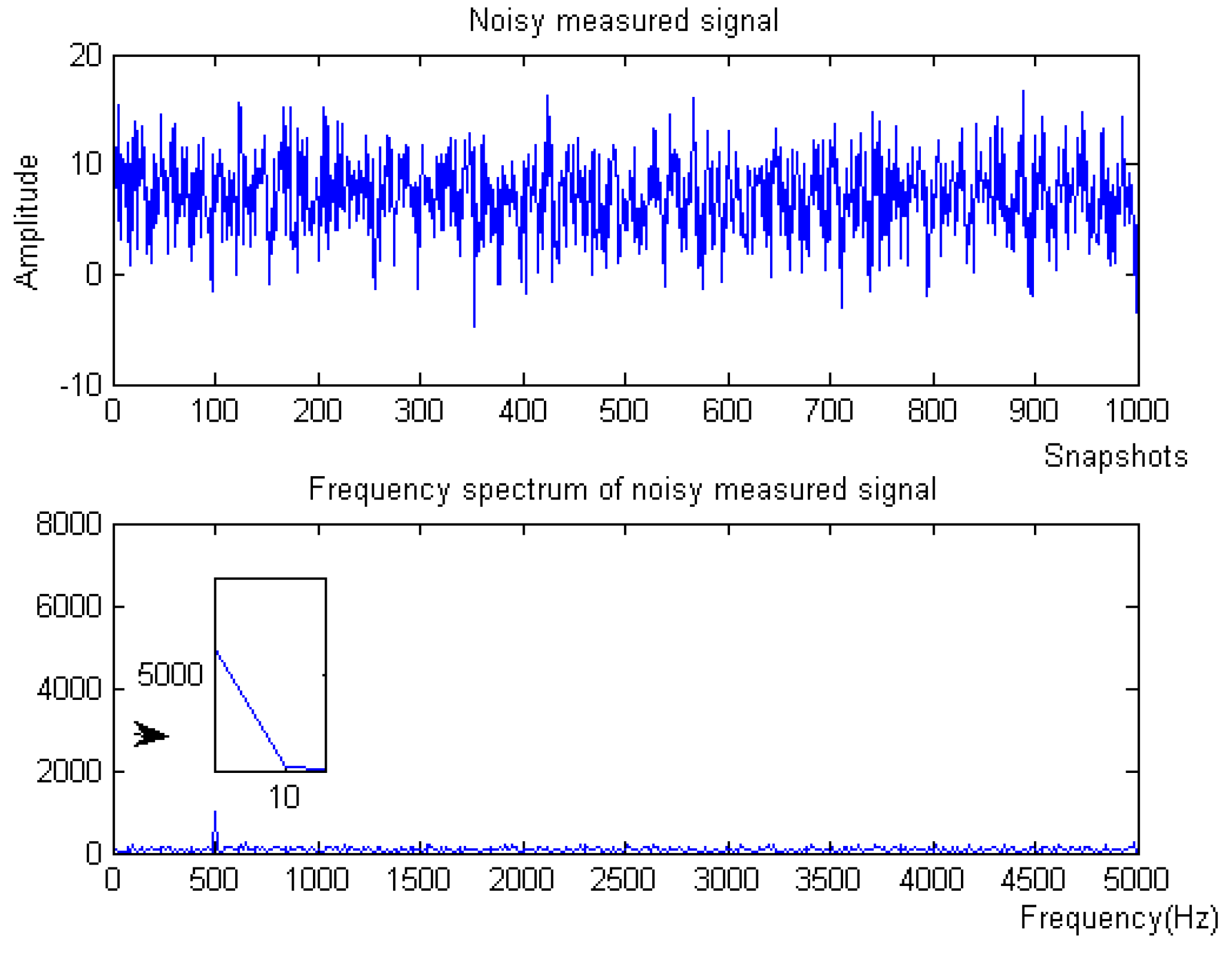
3.2. Simulation Experiment 2
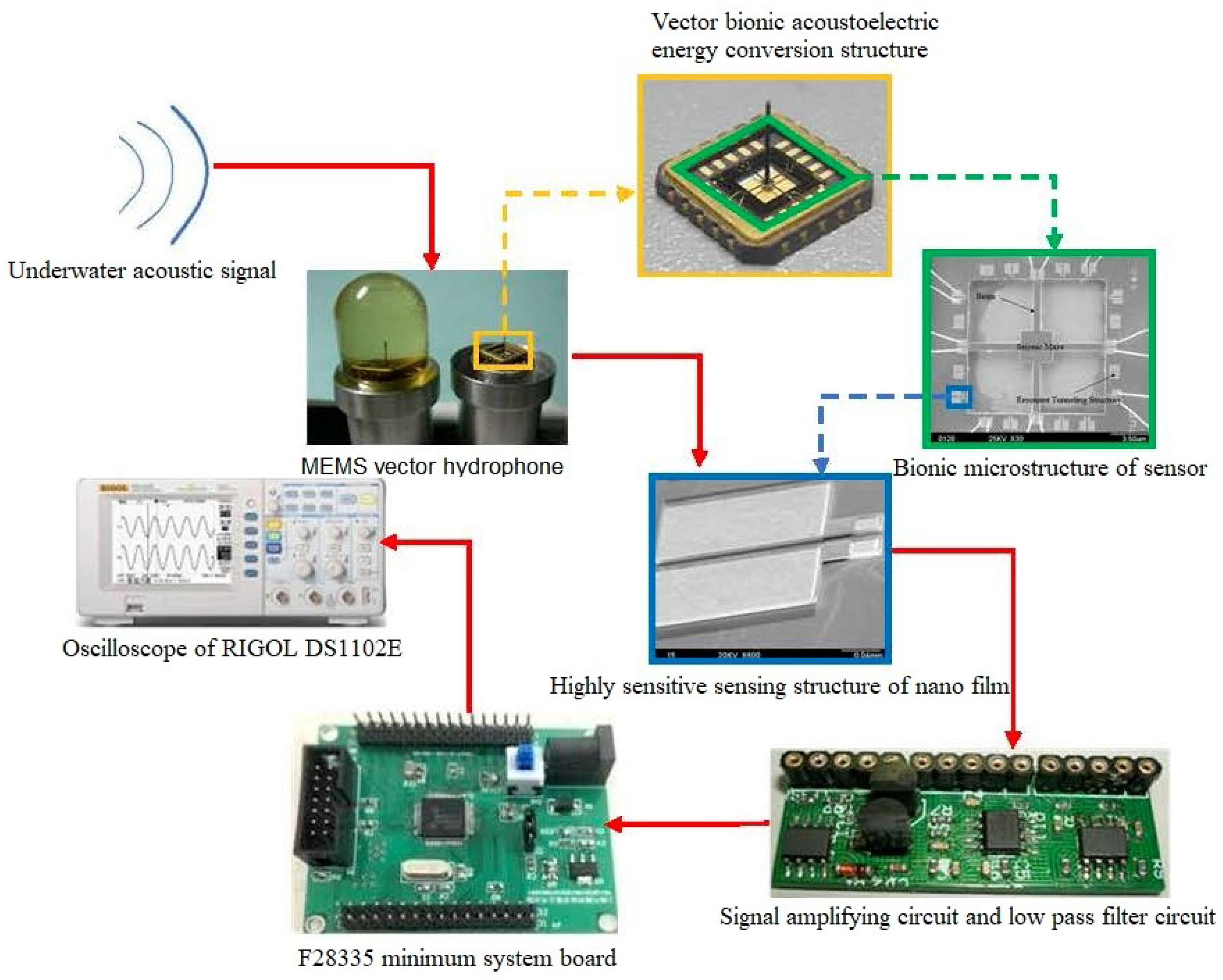
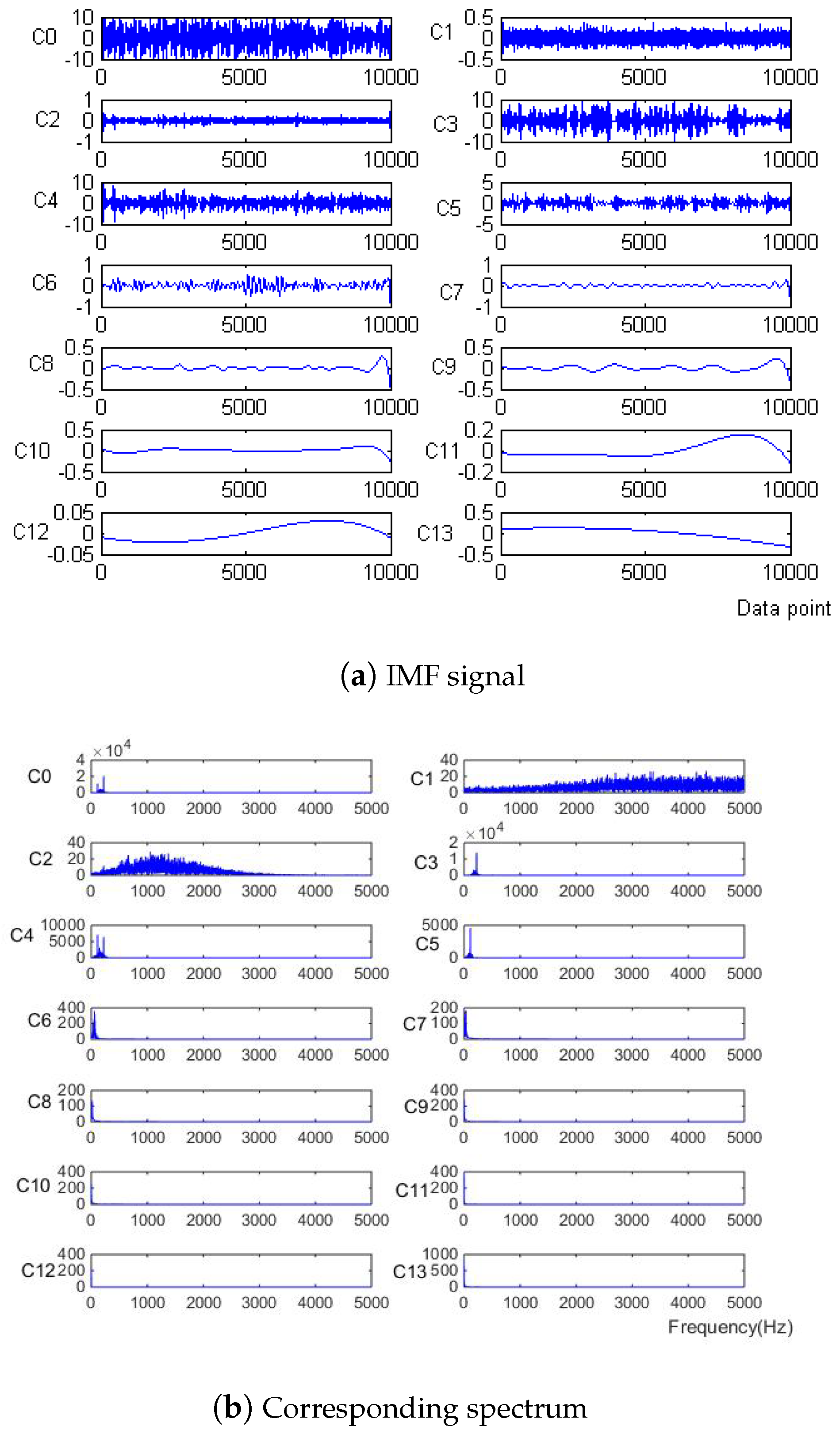
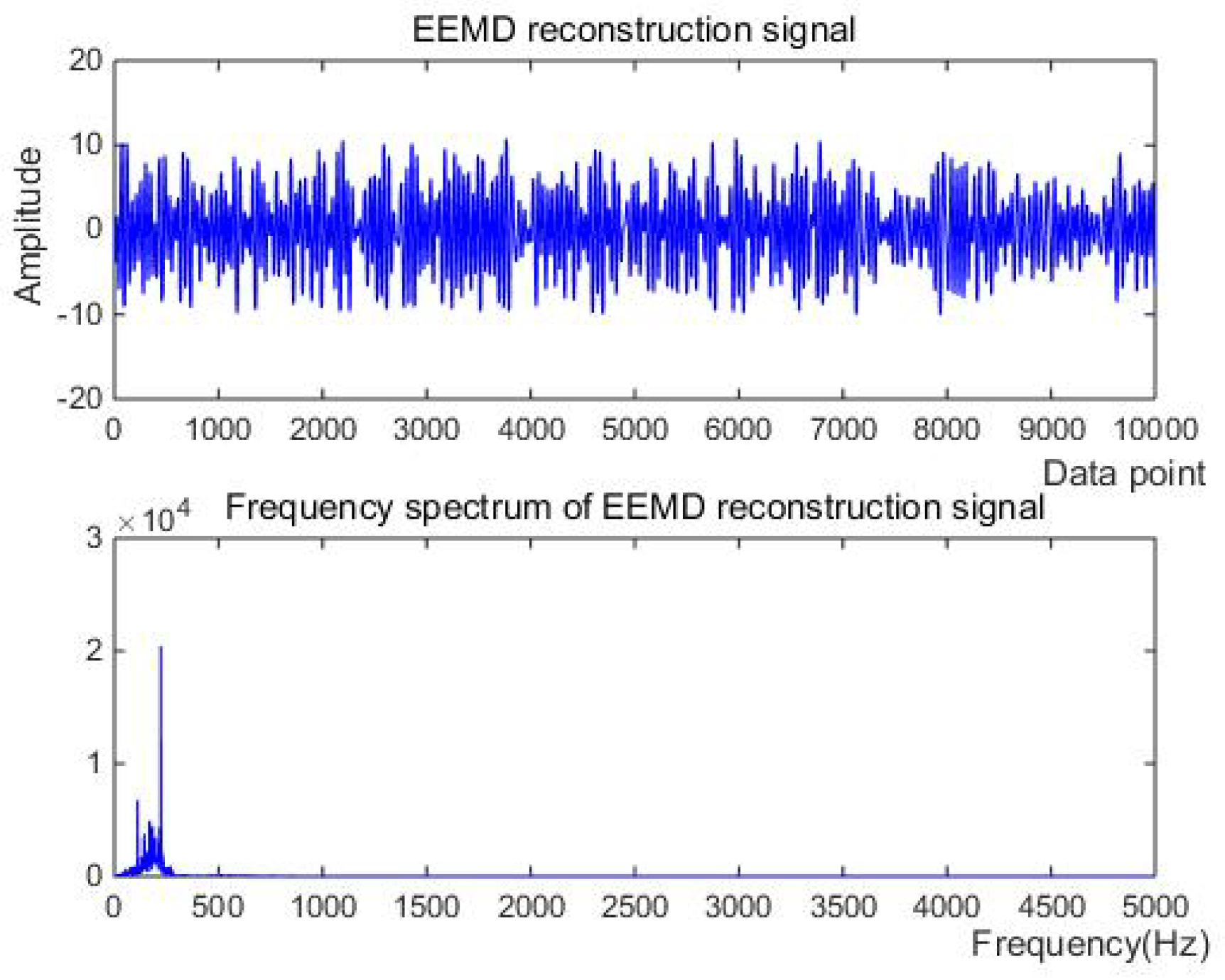
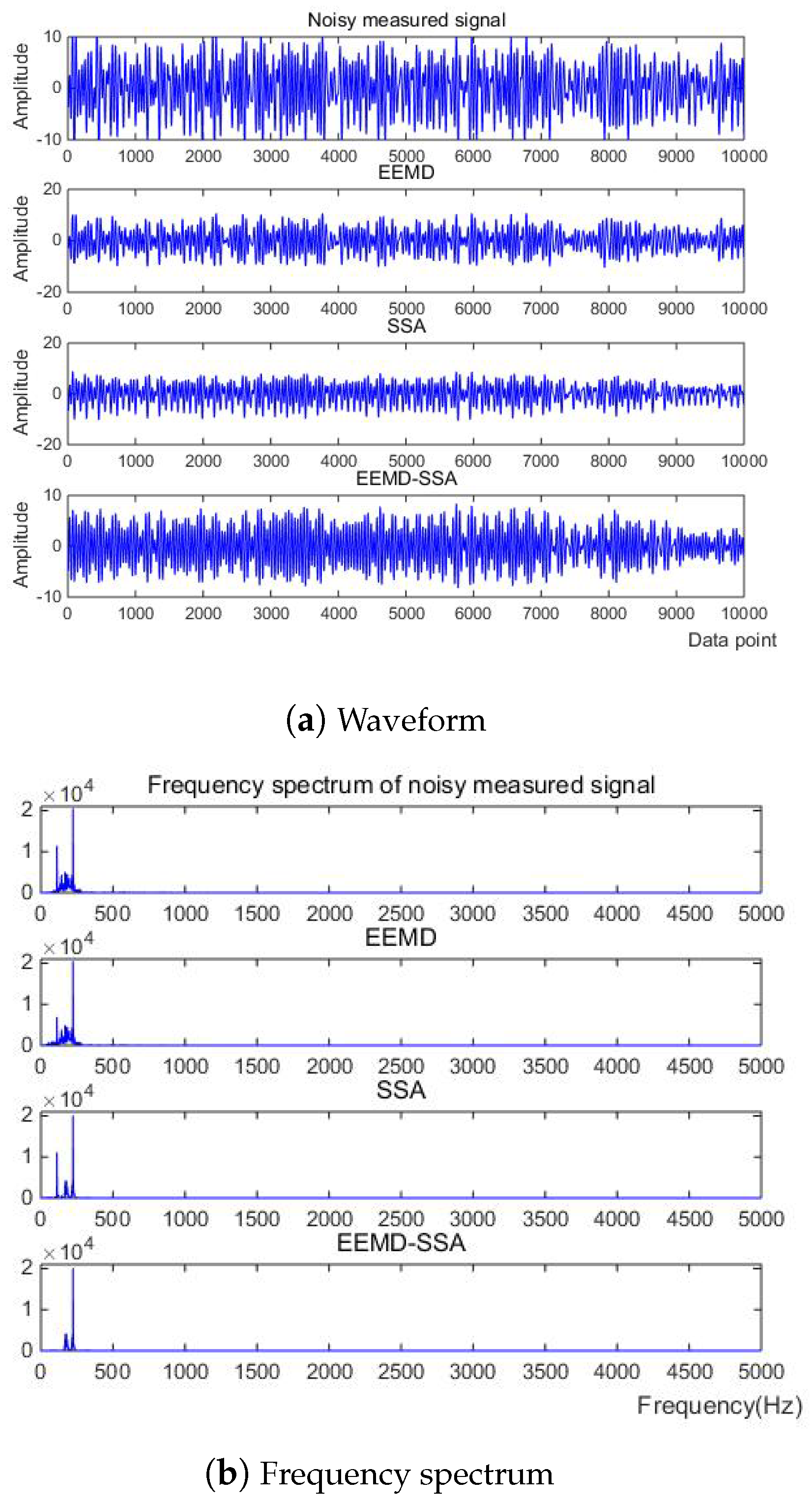
4. Experiment and Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xue, C.; Chen, S.; Zhang, W.; Zhang, B.; Zhang, G.; Qiao, H. Design, fabrication, and preliminary characterization of a novel MEMS bionic vector hydrophone. Microelectron. J. 2007, 38, 1021–1026. [Google Scholar] [CrossRef]
- Hang, G.J.; Zhen, L.; Wu, S.J.; Xue, C.Y.; Yang, S.E.; Zhang, W.D. A Bionic Fish Cilia Median-Low Frequency Three-Dimensional Piezoresistive MEMS Vector Hydrophone. Nano-Micro Lett. 2014, 6, 136–142. [Google Scholar] [CrossRef]
- Xue, C.; Tong, Z.; Zhang, B.; Zhang, W. A Novel Vector Hydrophone Based on the Piezoresistive Effect of Resonant Tunneling Diode. IEEE Sens. J. 2008, 8, 401–402. [Google Scholar] [CrossRef]
- Wang, R.; Shen, W.; Zhang, W.; Song, J.; Zhang, W. Design and implementation of a jellyfish otolith-inspired MEMS vector hydrophone for low-frequency detection. Microsyst. Nanoeng. 2021, 7, 1. [Google Scholar] [CrossRef]
- Zhu, S.; Zhang, G.; Wu, D.; Liang, X.; Zhang, Y.; Lv, T.; Liu, Y.; Chen, P.; Zhang, W. Research on Direction of Arrival Estimation Based on Self-Contained MEMS Vector Hydrophone. Micromachines 2022, 13, 236. [Google Scholar] [CrossRef]
- Nehorai, A.; Paldi, E. Acoustic Vector-Sensor Array Processing; IEEE Press: Hoboken, NJ, USA, 1994. [Google Scholar]
- Wang, P.; Kong, Y.; He, X.; Zhang, M.; Tan, X. An improved squirrel search algorithm for maximum likelihood DOA estimation and application for MEMS vector hydrophone array. IEEE Access 2019, 7, 118343–118358. [Google Scholar] [CrossRef]
- Matrecano, M.; Memmolo, P.; Miccio, L.; Persano, A.; Quaranta, F.; Siciliano, P.; Ferraro, P. Improving holographic reconstruction by automatic Butterworth filtering for microelectromechanical systems characterization. Appl. Opt. 2015, 54, 3428–3432. [Google Scholar] [CrossRef]
- Lu, P.; Zhuo, Z.; Zhang, W.; Tang, J.; Lu, J.Q. Accuracy improvement of quantitative LIBS analysis of coal properties using hybrid model based on wavelet threshold de-noising and feature selection method. Appl. Opt. 2020, 59, 6443–6451. [Google Scholar] [CrossRef]
- Liu, F.; Zhang, Y.; Yildirim, T.; Zhang, J. Signal denoising optimization based on a Hilbert-Huang transform-triple adaptable wavelet packet transform algorithm. EPL (Europhys. Lett.) 2019, 124, 54002. [Google Scholar] [CrossRef]
- Ramaswami, M. Network plasticity in adaptive filtering and behavioral habituation. Neuron 2014, 82, 1216–1229. [Google Scholar] [CrossRef] [PubMed]
- Pang, Y.; Deng, L.; Lin, J.Z.; Li, Z.Y.; Wu, W. A method of removing baseline drift in ECG signal based on morphological filtering. Acta Phys. Sin. 2014, 63, 1691–1695. [Google Scholar] [CrossRef]
- Atkinson, K.; Potra, F. On the discrete Galerkin method for Fredholm integral equations of the second kind. IMA J. Numer. Anal. 1989, 9, 385–403. [Google Scholar] [CrossRef]
- Lastre-Domínguez, C.; Shmaliy, Y.S.; Ibarra-Manzano, O.; Munoz-Minjares, J.; Morales-Mendoza, L.J. ECG Signal Denoising and Features Extraction Using Unbiased FIR Smoothing. BioMed Res. Int. 2019, 2019, 2608547. [Google Scholar] [CrossRef]
- Stehman, M.; Nakata, N. IIR Compensation in Real-Time Hybrid Simulation using Shake Tables with Complex Control-Structure-Interaction. J. Earthq. Eng. 2016, 20, 633–653. [Google Scholar] [CrossRef]
- Xi, Y.; Tang, X.; Li, Z.; Cui, Y.; Zhao, T.; Zeng, X.; Guo, J.; Duan, W. Harmonic estimation in power systems using an optimised adaptive Kalman filter based on PSO-GA. IET Gener. Transm. Distrib. 2019, 13, 3968–3979. [Google Scholar] [CrossRef]
- Salman, A.H.; Ahmadi, N.; Mengko, R.; Langi, A.Z.R.; Mengko, T.L.R. Empirical Mode Decomposition (EMD) Based Denoising Method for Heart Sound Signal and Its Performance Analysis. Int. J. Electr. Comput. Eng. 2016, 6, 2197–2204. [Google Scholar]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.C.; Chi, C.T.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Guo, X.; Sun, C.; Wang, P.; Huang, L. Hybrid methods for MEMS gyro signal noise reduction with fast convergence rate and small steady-state error. Sens. Actuators Phys. 2017, 269, 145–159. [Google Scholar] [CrossRef]
- Shen, C.; Li, J.; Zhang, X.; Tang, J.; Cao, H.; Liu, J. Multi-scale parallel temperature error processing for dual-mass MEMS gyroscope. Sens. Actuators Phys. 2016, 245, 160–168. [Google Scholar] [CrossRef]
- Flandrin, P.; Rilling, G.; Goncalves, P. Empirical mode decomposition as a filter bank. IEEE Signal Process. Lett. 2004, 11, 112–114. [Google Scholar] [CrossRef]
- Weng, B.; Blanco-Velasco, M.; Barner, K.E. ECG denoising based on the empirical mode decomposition. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, New York, NY, USA, 30 August–3 September 2006; Volume 1, pp. 1–4. [Google Scholar]
- Kabir, M.A.; Shahnaz, C. Denoising of ECG signals based on noise reduction algorithms in EMD and wavelet domains. Biomed. Signal Process. Control 2012, 7, 481–489. [Google Scholar] [CrossRef]
- Wu, Z.; Huang, N.E. Ensemble empirical mode decomposition: A noise-assisted data analysis method. Adv. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Guo, W.; Wang, K.S.; Wang, D.; Tse, P.W. Feature Signal Extraction Based on Ensemble Empirical Mode Decomposition for Multi-fault Bearings; Springer International Publishing: Cham, Switzerland, 2015. [Google Scholar]
- Zhou, Z.J. Multi-fault diagnosis for rolling element bearings based on ensemble empirical mode decomposition and optimized support vector machines. Mech. Syst. Signal Process. 2013, 41, 127–140. [Google Scholar]
- Yue, X.; Shao, H. Fault Diagnosis of Rolling Element Bearing Based on Improved Ensemble Empirical Mode Decomposition. In Proceedings of the 2015 7th International Conference on Intelligent Human-Machine Systems and Cybernetics (IHMSC), Hangzhou, China, 26–27 August 2015. [Google Scholar]
- Yeh, J.R.; Shieh, J.S.; Huang, N.E. Complementary ensemble empirical mode decomposition: A novel noise enhanced data analysis method. Adv. Adapt. Data Anal. 2010, 2, 135–156. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational mode decomposition. IEEE Trans. Signal Process. 2013, 62, 531–544. [Google Scholar] [CrossRef]
- Chen, W.; Yang, Z.; Cao, F.; Yan, Y.; Wang, M.; Qing, C.; Cheng, Y. Dimensionality Reduction Based on Determinantal Point Process and Singular Spectrum Analysis for Hyperspectral Images. IET Image Process. 2019, 13, 299–306. [Google Scholar] [CrossRef]
- Ogrosky, H.R.; Stechmann, S.N.; Chen, N.; Majda, A.J. Singular Spectrum Analysis With Conditional Predictions for Real-Time State Estimation and Forecasting. Geophys. Res. Lett. 2019, 46, 1851–1860. [Google Scholar] [CrossRef]
- Lin, Y.; Ling, B.W.K.; Xu, N.; Lam, R.W.K.; Ho, C.Y.F. Effectiveness analysis of bio-electronic stimulation therapy to Parkinson’s diseases via joint singular spectrum analysis and discrete fourier transform approach. Biomed. Signal Process. Control 2020, 62, 102131. [Google Scholar] [CrossRef]
- Ryu, J.; Hong, S.; Liang, S.; Pak, S.; Chen, Q.; Yan, S. A measurement of illumination variation-resistant noncontact heart rate based on the combination of singular spectrum analysis and sub-band method. Comput. Methods Programs Biomed. 2020, 200, 105824. [Google Scholar] [CrossRef]
- Logan, A.; Cava, D.G.; Liśkiewicz, G. Singular spectrum analysis as a tool for early detection of centrifugal compressor flow instability. Measurement 2020, 173, 108536. [Google Scholar] [CrossRef]
- Zubaidi, S.L.; Dooley, J.; Alkhaddar, R.M.; Abdellatif, M.; Al-Bugharbee, H.; Ortega-Martorell, S. A Novel approach for predicting monthly water demand by combining singular spectrum analysis with neural networks. J. Hydrol. 2018, 561, 136–145. [Google Scholar] [CrossRef]
- Alexandrov, T. A Method of Trend Extraction Using Singular Spectrum Analysis. Revstat-Stat. J. 2012, 7, 1–22. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SNR | EEMD | SSA | EEMD-SSA |
|---|---|---|---|
| −10 dB | −10.8098 | −2.8211 | −0.0420 |
| −5 dB | −5.9513 | 6.0827 | 7.2656 |
| 0 dB | −0.9591 | 13.7797 | 14.7295 |
| 5 dB | 3.8421 | 17.6929 | 18.3387 |
| 10 dB | 8.6353 | 22.1839 | 22.4746 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, P.; Dong, J.; Wang, L.; Qiao, S. Signal Denoising Method Based on EEMD and SSA Processing for MEMS Vector Hydrophones. Micromachines 2024, 15, 1183. https://doi.org/10.3390/mi15101183
Wang P, Dong J, Wang L, Qiao S. Signal Denoising Method Based on EEMD and SSA Processing for MEMS Vector Hydrophones. Micromachines. 2024; 15(10):1183. https://doi.org/10.3390/mi15101183
Chicago/Turabian StyleWang, Peng, Jie Dong, Lifu Wang, and Shuhui Qiao. 2024. "Signal Denoising Method Based on EEMD and SSA Processing for MEMS Vector Hydrophones" Micromachines 15, no. 10: 1183. https://doi.org/10.3390/mi15101183