
Wind-Wave Synergistic Triboelectric Nanogenerator: Performance Evaluation Test and Potential Applications in Offshore Areas

 and
and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
2.1. Fabrication of the WWS-TENG
2.2. Experimental Procedure and Measuring Equipment
3. Results and Discussion
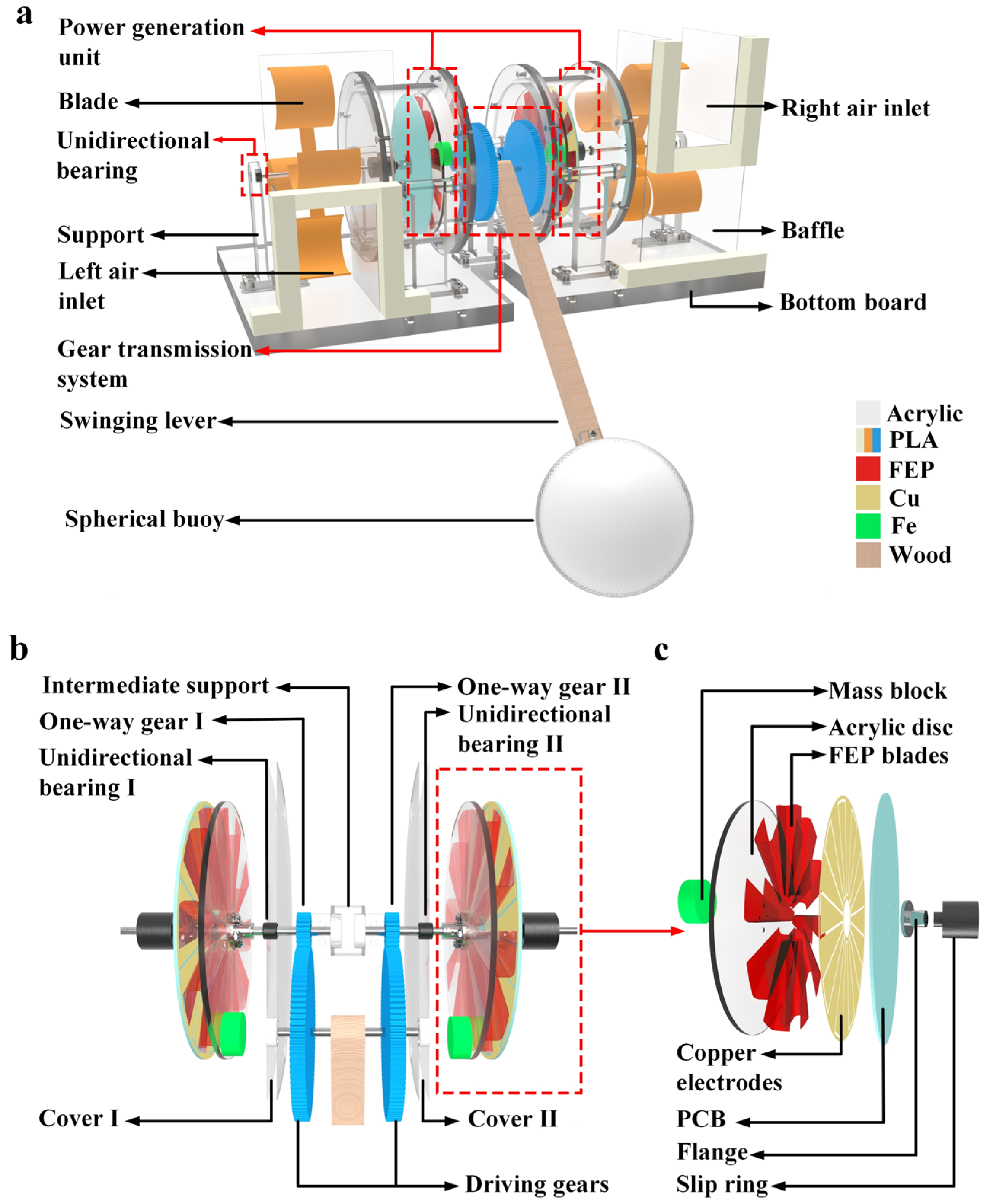
3.1. The Structure of WWS-TENG
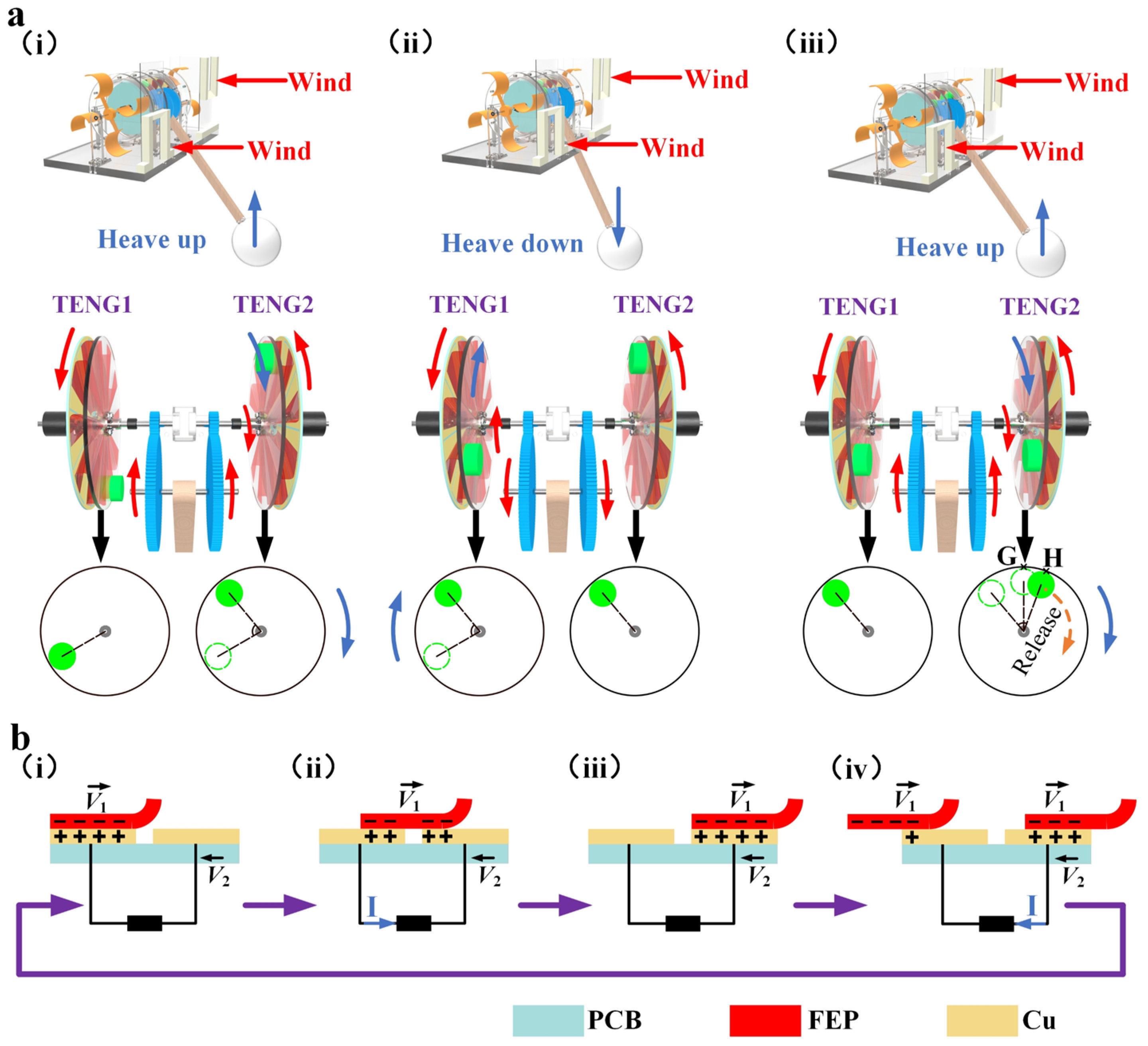
3.2. The Working Principle of WWS-TENG
3.3. Output Performance of WWS-TENG
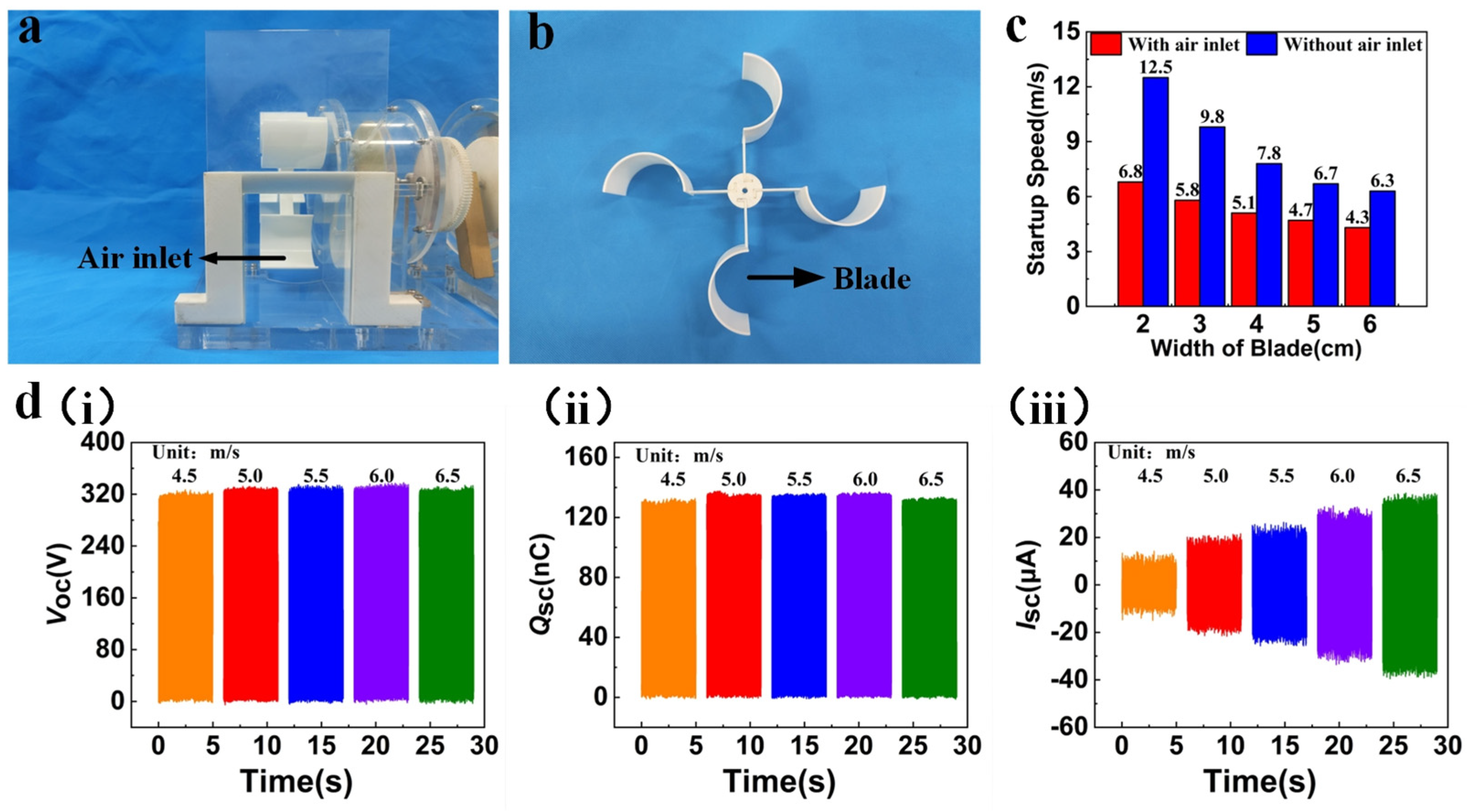
3.3.1. The Output Performance under Simulated Sea Wind Excitation
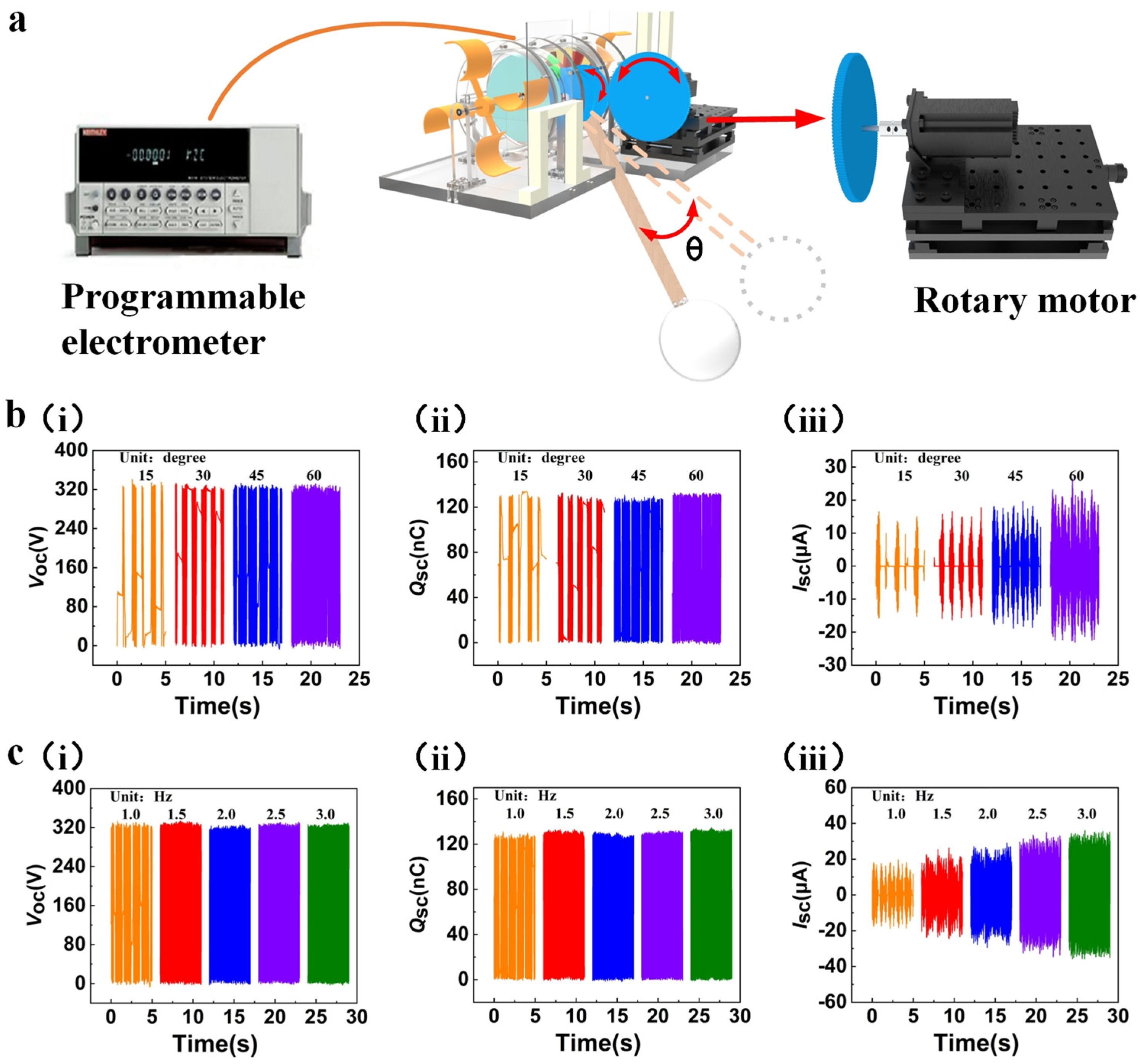
3.3.2. The Output Performance under Simulated Wave Excitation
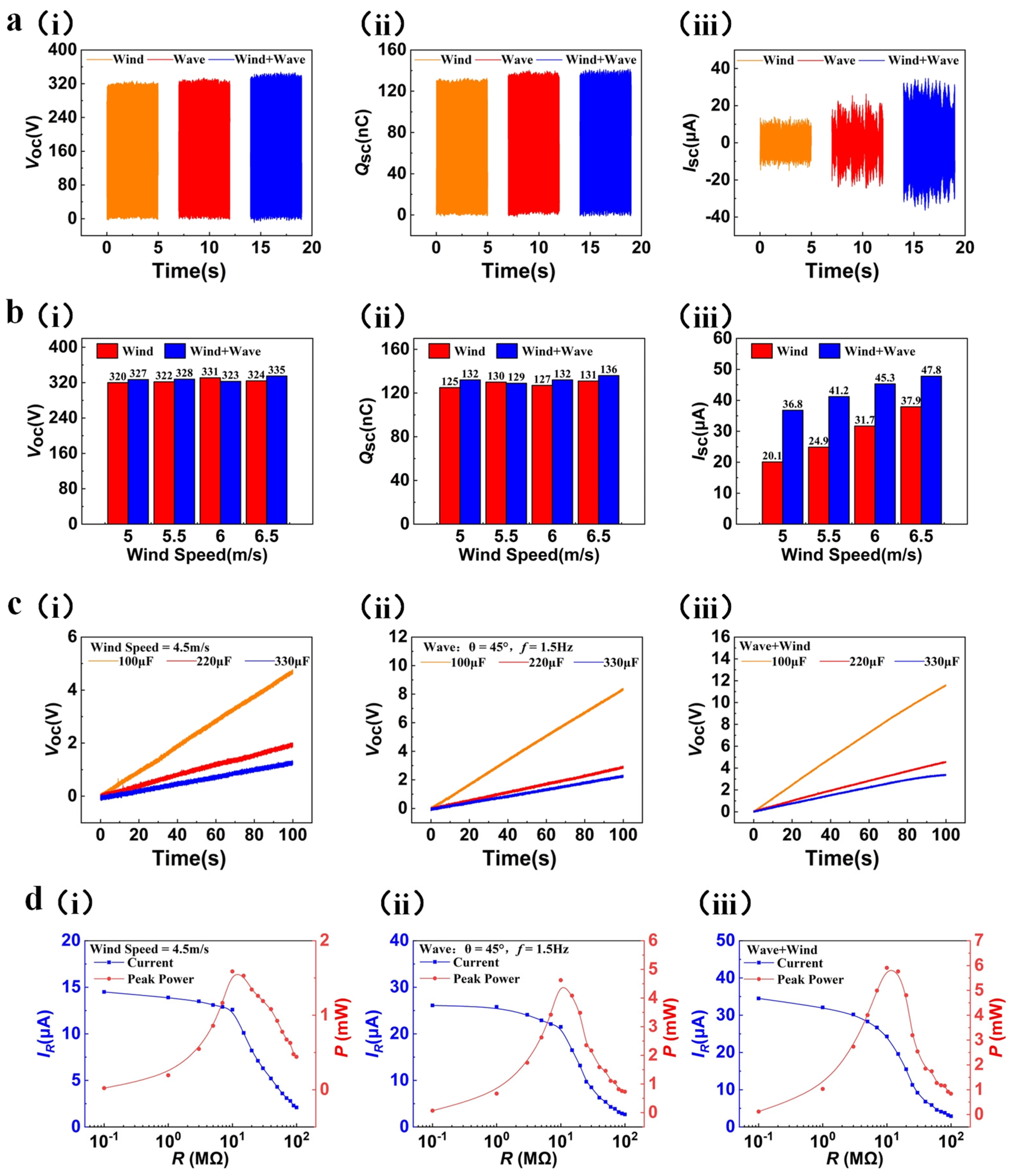
3.3.3. The Output Performance under Simulated Wind-Wave Superposition Excitation
3.3.4. The Output Performance of Two Power Generation Units in Parallel
3.3.5. Application Demonstration
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhong, Z.; Reddy, R. Facing Challenges Together. Engineering 2016, 2. [Google Scholar] [CrossRef]
- Davidson, D.J. Exnovating for a Renewable Energy Transition. Nat. Energy 2019, 4, 254–256. [Google Scholar] [CrossRef]
- Borthwick, A.G.L. Marine Renewable Energy Seascape. Engineering 2016, 2, 69–78. [Google Scholar] [CrossRef]
- Wang, Z.L. On Maxwell’s Displacement Current for Energy and Sensors: The Origin of Nanogenerators. Mater. Today 2017, 20, 74–82. [Google Scholar] [CrossRef]
- Zhang, C.; Tang, W.; Han, C.; Fan, F.; Wang, Z.L. Theoretical Comparison, Equivalent Transformation, and Conjunction Operations of Electromagnetic Induction Generator and Triboelectric Nanogenerator for Harvesting Mechanical Energy. Adv. Mater. 2014, 26, 3580–3591. [Google Scholar] [CrossRef]
- Gu, M.; Chen, Y.; Gu, S.; Wang, C.; Chen, L.; Shen, H.; Chen, G.; Sun, X.; Huang, H.; Zhou, Y.; et al. Brightness-Enhanced Electroluminescence Driven by Triboelectric Nanogenerators through Permittivity Manipulation and Impedance Matching. Nano Energy 2022, 98, 107308. [Google Scholar] [CrossRef]
- Yang, Y.; Chen, L.; He, J.; Hou, X.; Qiao, X.; Xiong, J.; Chou, X. Flexible and Extendable Honeycomb-Shaped Triboelectric Nanogenerator for Effective Human Motion Energy Harvesting and Biomechanical Sensing. Adv. Mater. Technol. 2021, 7, 2100702. [Google Scholar] [CrossRef]
- Feng, T.; Ling, D.; Li, C.; Zheng, W.; Zhang, S.; Li, C.; Emel’yanov, A.; Pozdnyakov, A.S.; Lu, L.; Mao, Y. Stretchable on-Skin Touchless Screen Sensor Enabled by Ionic Hydrogel. Nano Res. 2023. [Google Scholar] [CrossRef]
- Feng, Y.; Zhang, L.; Zheng, Y.; Wang, D.; Zhou, F.; Liu, W. Leaves Based Triboelectric Nanogenerator (Teng) and Teng Tree for Wind Energy Harvesting. Nano Energy 2019, 55, 260–268. [Google Scholar] [CrossRef]
- Ren, Z.; Wu, L.; Pang, Y.; Zhang, W.; Yang, R. Strategies for Effectively Harvesting Wind Energy Based on Triboelectric Nanogenerators. Nano Energy 2022, 100, 107522. [Google Scholar] [CrossRef]
- Shi, B.; Wang, Q.; Su, H.; Li, J.; Xie, B.; Wang, P.; Qiu, J.; Wu, C.; Zhang, Y.; Zhou, X.; et al. Progress in Recent Research on the Design and Use of Triboelectric Nanogenerators for Harvesting Wind Energy. Nano Energy 2023, 116, 108789. [Google Scholar] [CrossRef]
- Zhang, C.; Liu, Y.; Zhang, B.; Yang, O.; Yuan, W.; He, L.; Wei, X.; Wang, J.; Wang, Z.L. Harvesting Wind Energy by a Triboelectric Nanogenerator for an Intelligent High-Speed Train System. ACS Energy Lett. 2021, 6, 1490–1499. [Google Scholar] [CrossRef]
- Yan, J.; Tang, Z.; Mei, N.; Zhang, D.; Zhong, Y.; Sheng, Y. Research Progress on the Application of Triboelectric Nanogenerators for Wind Energy Collection. Micromachines 2023, 14, 1592. [Google Scholar] [CrossRef]
- Rodrigues, C.; Nunes, D.; Clemente, D.; Mathias, N.; Correia, J.M.; Rosa-Santos, P.; Taveira-Pinto, F.; Morais, T.; Pereira, A.; Ventura, J. Emerging Triboelectric Nanogenerators for Ocean Wave Energy Harvesting: State of the Art and Future Perspectives. Energy Environ. Sci. 2020, 13, 2657–2683. [Google Scholar] [CrossRef]
- Zhai, H.; Ding, S.; Chen, X.; Wu, Y.; Wang, Z.L. Advances in Solid–Solid Contacting Triboelectric Nanogenerator for Ocean Energy Harvesting. Mater. Today 2023, 65, 166–188. [Google Scholar] [CrossRef]
- Jiang, D.; Xu, M.; Dong, M.; Guo, F.; Liu, X.; Chen, G.; Wang, Z.L. Water-Solid Triboelectric Nanogenerators: An Alternative Means for Harvesting Hydropower. Renew. Sustain. Energy Rev. 2019, 115, 109366. [Google Scholar] [CrossRef]
- Jiang, Y.; Liang, X.; Jiang, T.; Wang, Z.L. Advances in Triboelectric Nanogenerators for Blue Energy Harvesting and Marine Environmental Monitoring. Engineering 2023. [Google Scholar] [CrossRef]
- Xu, W.; Zheng, H.; Liu, Y.; Zhou, X.; Zhang, C.; Song, Y.; Deng, X.; Leung, M.; Yang, Z.; Xu, R.X.; et al. A Droplet-Based Electricity Generator with High Instantaneous Power Density. Nature 2020, 578, 392–396. [Google Scholar] [CrossRef] [PubMed]
- Zhang, N.; Zhang, H.; Xu, W.; Gu, H.; Ye, S.; Zheng, H.; Song, Y.; Wang, Z.; Zhou, X. A Droplet-Based Electricity Generator with Ultrahigh Instantaneous Output and Short Charging Time. Droplet 2022, 1, 56–64. [Google Scholar] [CrossRef]
- Xu, L.; Jiang, T.; Lin, P.; Shao, J.J.; He, C.; Zhong, W.; Chen, X.Y.; Wang, Z.L. Coupled Triboelectric Nanogenerator Networks for Efficient Water Wave Energy Harvesting. ACS Nano 2018, 12, 1849–1858. [Google Scholar] [CrossRef] [PubMed]
- Yang, X.; Xu, L.; Lin, P.; Zhong, W.; Bai, Y.; Luo, J.; Chen, J.; Wang, Z.L. Macroscopic Self-Assembly Network of Encapsulated High-Performance Triboelectric Nanogenerators for Water Wave Energy Harvesting. Nano Energy 2019, 60, 404–412. [Google Scholar] [CrossRef]
- Xu, M.; Zhao, T.; Wang, C.; Zhang, S.L.; Li, Z.; Pan, X.; Wang, Z.L. High Power Density Tower-Like Triboelectric Nanogenerator for Harvesting Arbitrary Directional Water Wave Energy. ACS Nano 2019, 13, 1932–1939. [Google Scholar] [CrossRef]
- Pang, Y.; Chen, S.; Chu, Y.; Wang, Z.L.; Cao, C. Matryoshka-Inspired Hierarchically Structured Triboelectric Nanogenerators for Wave Energy Harvesting. Nano Energy 2019, 66, 104131. [Google Scholar] [CrossRef]
- Tan, D.; Zeng, Q.; Wang, X.; Yuan, S.; Luo, Y.; Zhang, X.; Tan, L.; Hu, C.; Liu, G. Anti-Overturning Fully Symmetrical Triboelectric Nanogenerator Based on an Elliptic Cylindrical Structure for All-Weather Blue Energy Harvesting. Nano-Micro Lett. 2022, 14, 124. [Google Scholar] [CrossRef] [PubMed]
- Yuan, Z.; Wang, C.; Xi, J.; Han, X.; Li, J.; Han, S.-T.; Gao, W.; Pan, C. Spherical Triboelectric Nanogenerator with Dense Point Contacts for Harvesting Multidirectional Water Wave and Vibration Energy. ACS Energy Lett. 2021, 6, 2809–2816. [Google Scholar] [CrossRef]
- Zhang, C.; Zhou, L.; Cheng, P.; Liu, D.; Zhang, C.; Li, X.; Li, S.; Wang, J.; Wang, Z.L. Bifilar-Pendulum-Assisted Multilayer-Structured Triboelectric Nanogenerators for Wave Energy Harvesting. Adv. Energy Mater. 2021, 11, 2003616. [Google Scholar] [CrossRef]
- Zhang, C.; He, L.; Zhou, L.; Yang, O.; Yuan, W.; Wei, X.; Liu, Y.; Lu, L.; Wang, J.; Wang, Z.L. Active Resonance Triboelectric Nanogenerator for Harvesting Omnidirectional Water-Wave Energy. Joule 2021, 5, 1613–1623. [Google Scholar] [CrossRef]
- Lei, R.; Zhai, H.; Nie, J.; Zhong, W.; Bai, Y.; Liang, X.; Xu, L.; Jiang, T.; Chen, X.; Wang, Z.L. Butterfly-Inspired Triboelectric Nanogenerators with Spring-Assisted Linkage Structure for Water Wave Energy Harvesting. Adv. Mater. Technol. 2018, 4, 1800514. [Google Scholar] [CrossRef]
- Zhong, W.; Xu, L.; Yang, X.; Tang, W.; Shao, J.; Chen, B.; Wang, Z.L. Open-Book-Like Triboelectric Nanogenerators Based on Low-Frequency Roll–Swing Oscillators for Wave Energy Harvesting. Nanoscale 2019, 11, 7199–7208. [Google Scholar] [CrossRef]
- Pang, H.; Feng, Y.; An, J.; Chen, P.; Han, J.; Jiang, T.; Wang, Z.L. Segmented Swing-Structured Fur-Based Triboelectric Nanogenerator for Harvesting Blue Energy toward Marine Environmental Applications. Adv. Funct. Mater. 2021, 31, 2106398. [Google Scholar] [CrossRef]
- Bai, Y.; Xu, L.; He, C.; Zhu, L.; Yang, X.; Jiang, T.; Nie, J.; Zhong, W.; Wang, Z.L. High-Performance Triboelectric Nanogenerators for Self-Powered, in-Situ and Real-Time Water Quality Mapping. Nano Energy 2019, 66, 104117. [Google Scholar] [CrossRef]
- Hu, Y.; Qiu, H.; Sun, Q.; Wang, Z.L.; Xu, L. Wheel-Structured Triboelectric Nanogenerators with Hyperelastic Networking for High-Performance Wave Energy Harvesting. Small Methods 2023, 7, 2300582. [Google Scholar] [CrossRef]
- Cao, B.; Wang, P.; Rui, P.; Wei, X.; Wang, Z.; Yang, Y.; Tu, X.; Chen, C.; Wang, Z.; Yang, Z.; et al. Broadband and Output-Controllable Triboelectric Nanogenerator Enabled by Coupling Swing-Rotation Switching Mechanism with Potential Energy Storage/Release Strategy for Low-Frequency Mechanical Energy Harvesting. Adv. Energy Mater. 2022, 12, 2202627. [Google Scholar] [CrossRef]
- Zhang, C.; Yuan, W.; Zhang, B.; Yang, J.; Hu, Y.; He, L.; Zhao, X.; Li, X.; Wang, Z.L.; Wang, J. A Rotating Triboelectric Nanogenerator Driven by Bidirectional Swing for Water Wave Energy Harvesting. Small 2023, 19, 2304412. [Google Scholar] [CrossRef] [PubMed]
- Qiu, H.; Wang, H.; Xu, L.; Zheng, M.; Wang, Z.L. Brownian Motor Inspired Monodirectional Continuous Spinning Triboelectric Nanogenerators for Extracting Energy from Irregular Gentle Water Waves. Energy Environ. Sci. 2023, 16, 473–483. [Google Scholar] [CrossRef]
- Rui, P.; Zhang, W.; Zhong, Y.; Wei, X.; Guo, Y.; Shi, S.; Liao, Y.; Cheng, J.; Wang, P. High-Performance Cylindrical Pendulum Shaped Triboelectric Nanogenerators Driven by Water Wave Energy for Full-Automatic and Self-Powered Wireless Hydrological Monitoring System. Nano Energy 2020, 74, 104937. [Google Scholar] [CrossRef]
- Han, J.; Liu, Y.; Feng, Y.; Jiang, T.; Wang, Z.L. Achieving a Large Driving Force on Triboelectric Nanogenerator by Wave-Driven Linkage Mechanism for Harvesting Blue Energy toward Marine Environment Monitoring. Adv. Energy Mater. 2022, 13, 2203219. [Google Scholar] [CrossRef]
- Jiang, W.; Chen, C.; Wang, C.; Li, J.; Zhao, M.; Xiang, T.; Wang, P. Design of Triboelectric Nanogenerators Featuring Motion Form Conversion, Motion Rectification, and Frequency Multiplication for Low-Frequency Ocean Energy Harvesting. Energy Environ. Sci. 2023, 16, 6003–6014. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, Z.; Wu, W.; Zhou, J.; Hu, Y.; Li, J.; Wang, Y.; Ma, J.; Wen, J. Wind-Wave Synergistic Triboelectric Nanogenerator: Performance Evaluation Test and Potential Applications in Offshore Areas. Micromachines 2024, 15, 314. https://doi.org/10.3390/mi15030314
Pan Z, Wu W, Zhou J, Hu Y, Li J, Wang Y, Ma J, Wen J. Wind-Wave Synergistic Triboelectric Nanogenerator: Performance Evaluation Test and Potential Applications in Offshore Areas. Micromachines. 2024; 15(3):314. https://doi.org/10.3390/mi15030314
Chicago/Turabian StylePan, Zhen, Weijian Wu, Jiangtao Zhou, Yili Hu, Jianping Li, Yingting Wang, Jijie Ma, and Jianming Wen. 2024. "Wind-Wave Synergistic Triboelectric Nanogenerator: Performance Evaluation Test and Potential Applications in Offshore Areas" Micromachines 15, no. 3: 314. https://doi.org/10.3390/mi15030314
APA StylePan, Z., Wu, W., Zhou, J., Hu, Y., Li, J., Wang, Y., Ma, J., & Wen, J. (2024). Wind-Wave Synergistic Triboelectric Nanogenerator: Performance Evaluation Test and Potential Applications in Offshore Areas. Micromachines, 15(3), 314. https://doi.org/10.3390/mi15030314