
Research on Vibration Accumulation Self-Powered Downhole Sensor Based on Triboelectric Nanogenerators


Abstract
1. Introduction
2. Structure and Working Principle
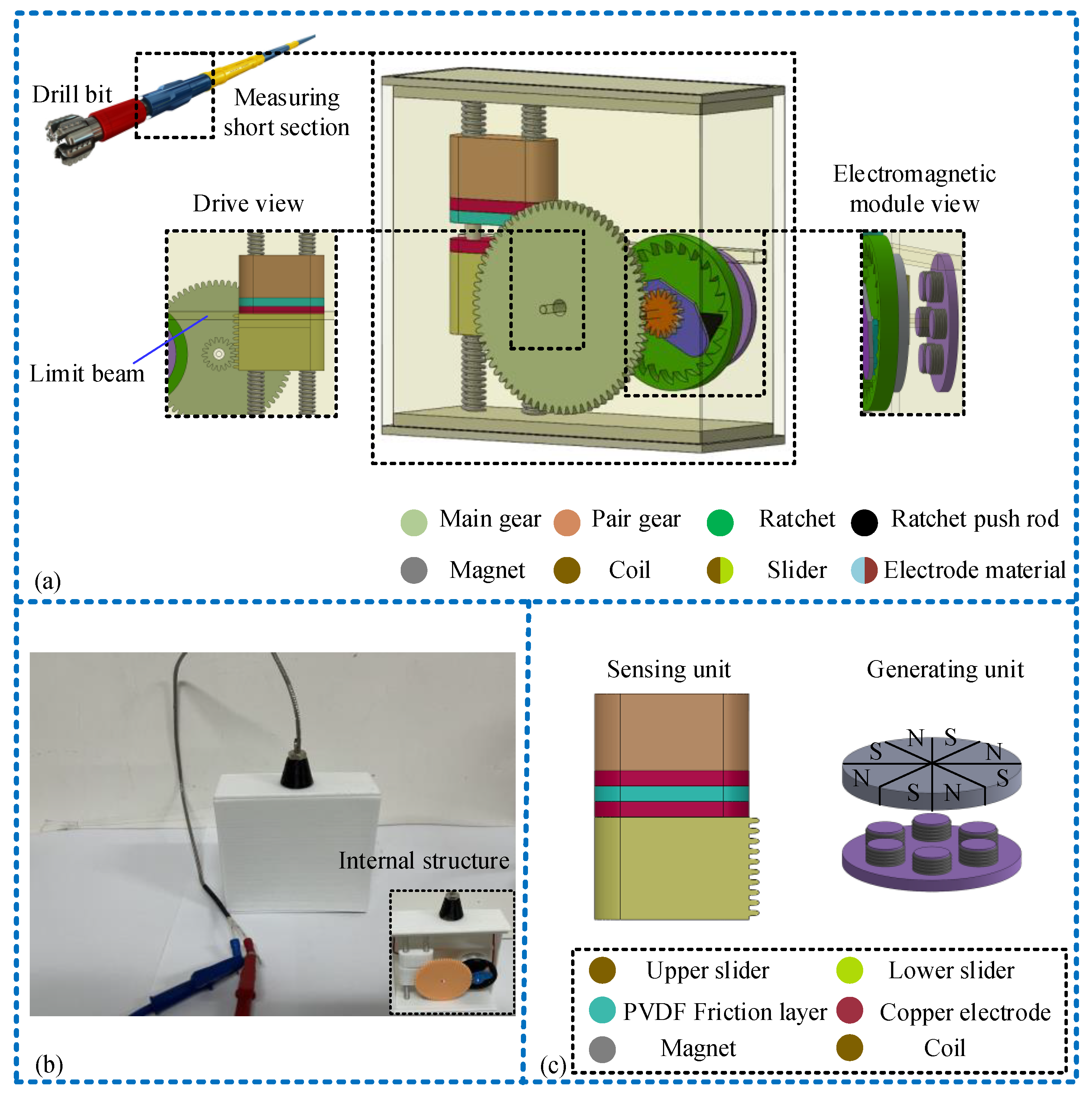
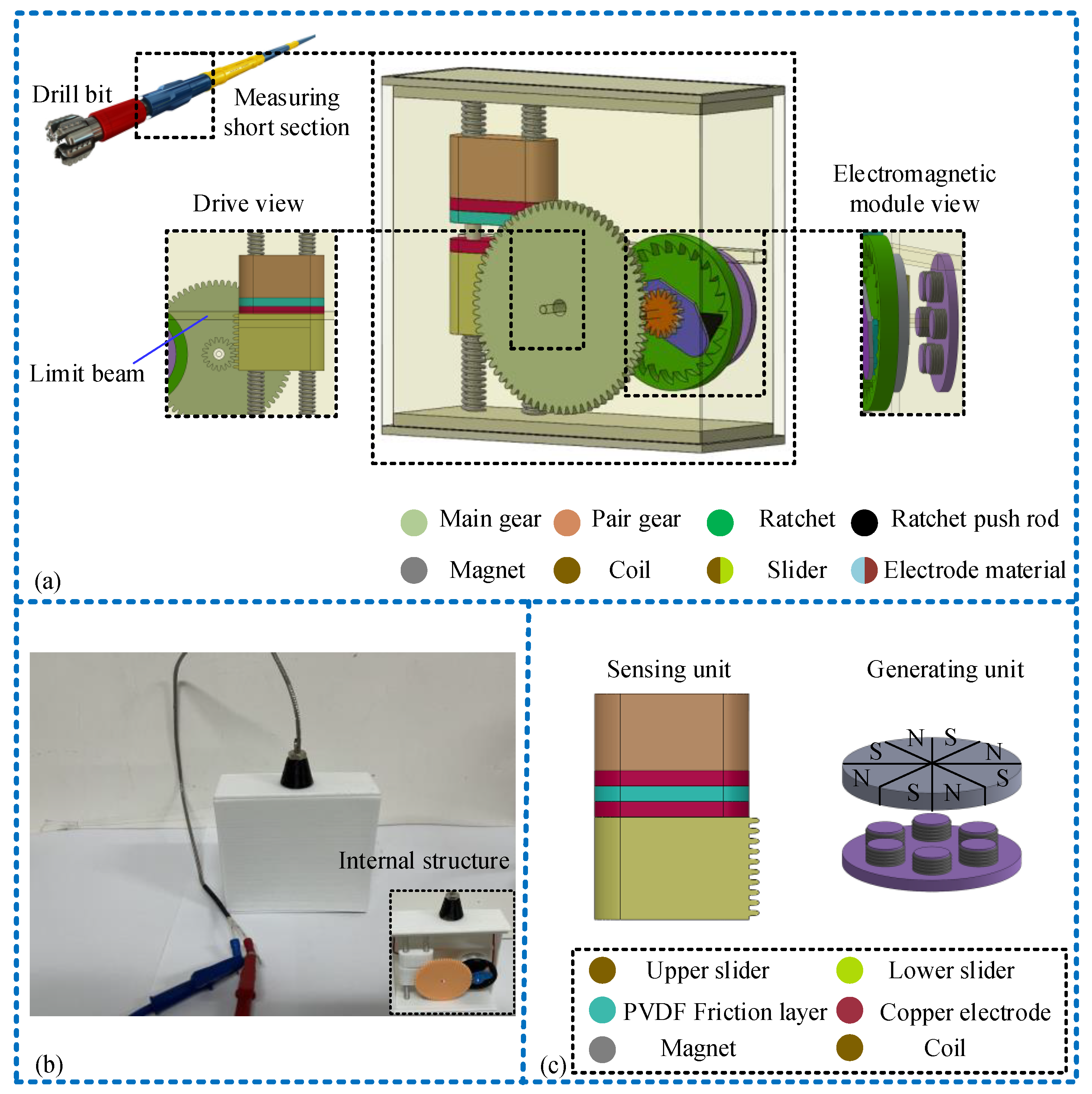
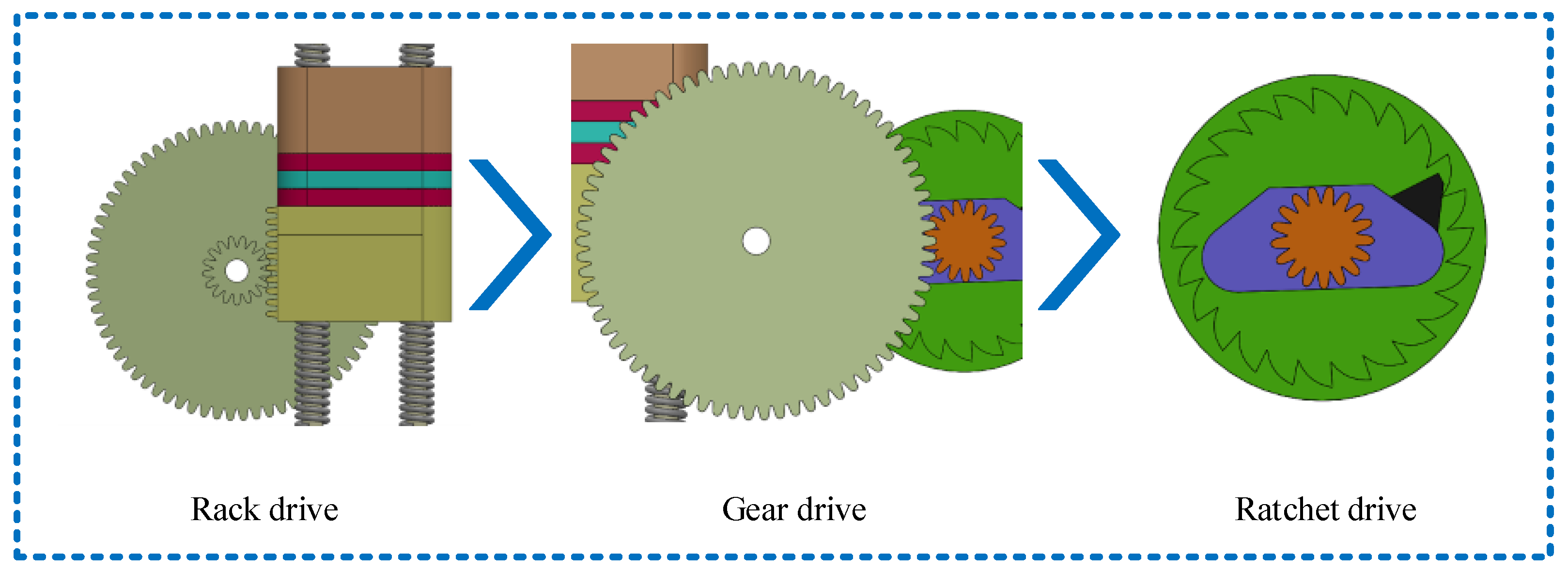
2.1. Structural Design
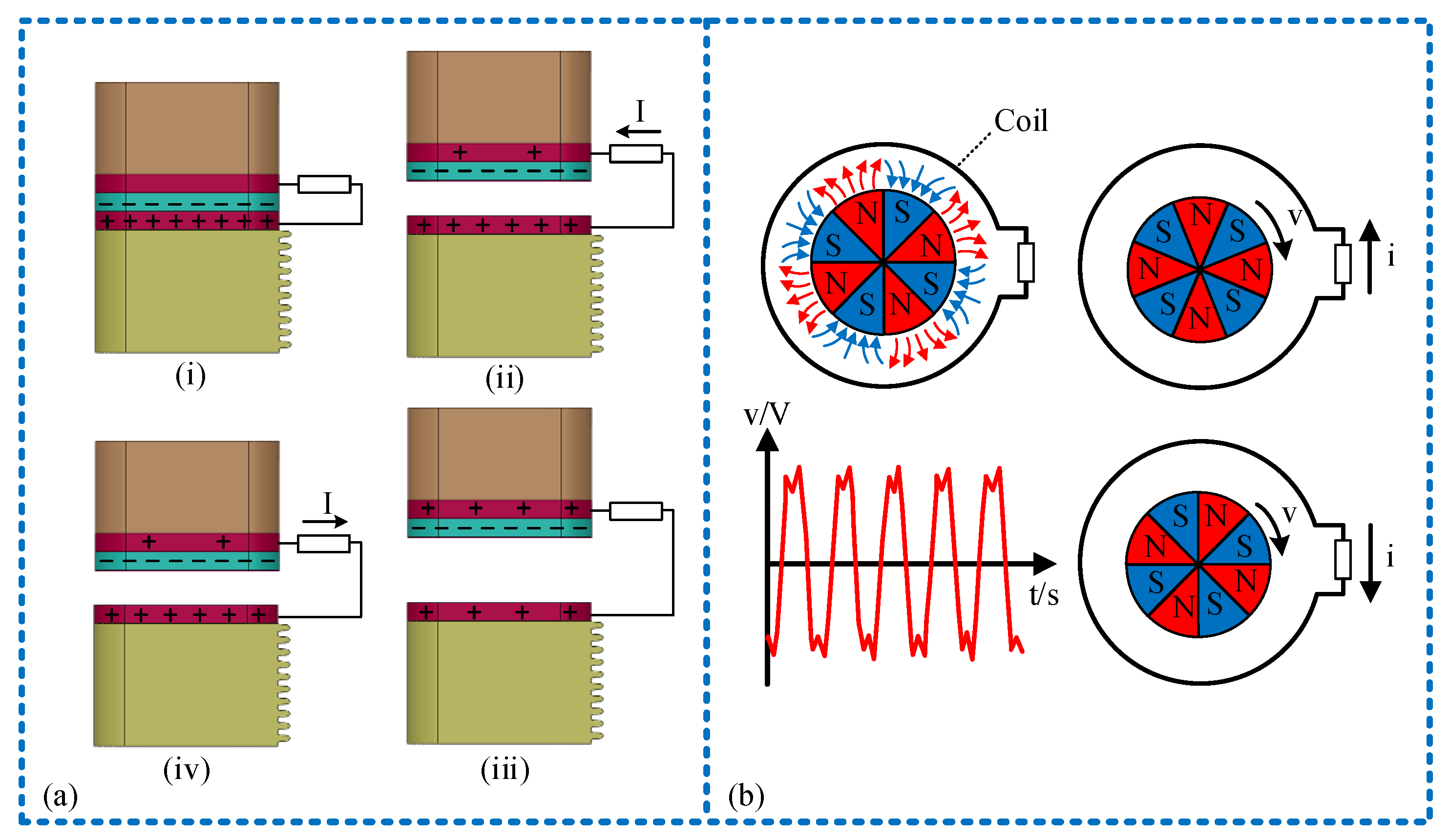
2.2. Working Principle
3. Tests and Results
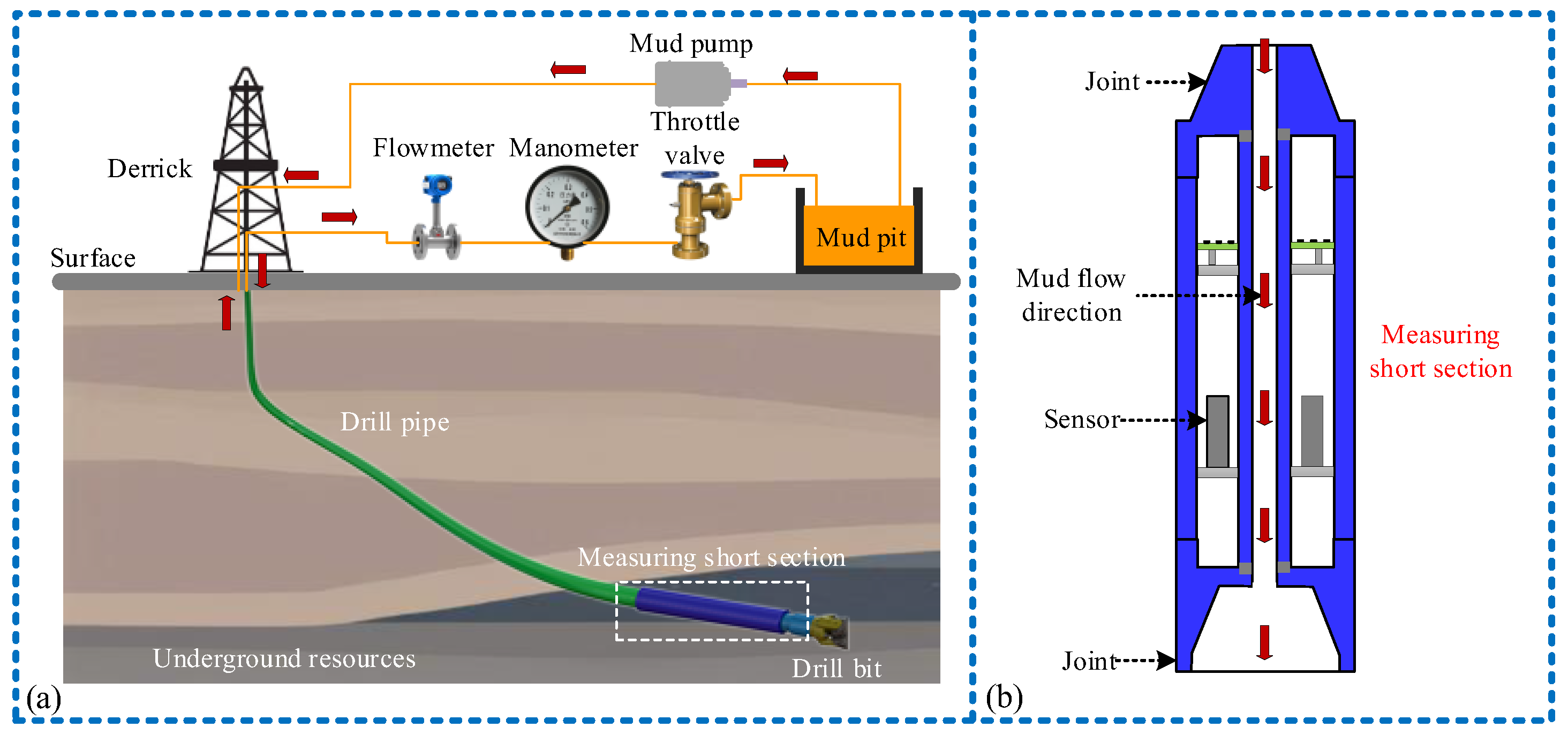
3.1. Experimental Facilities
3.2. Research on Sensing Performance
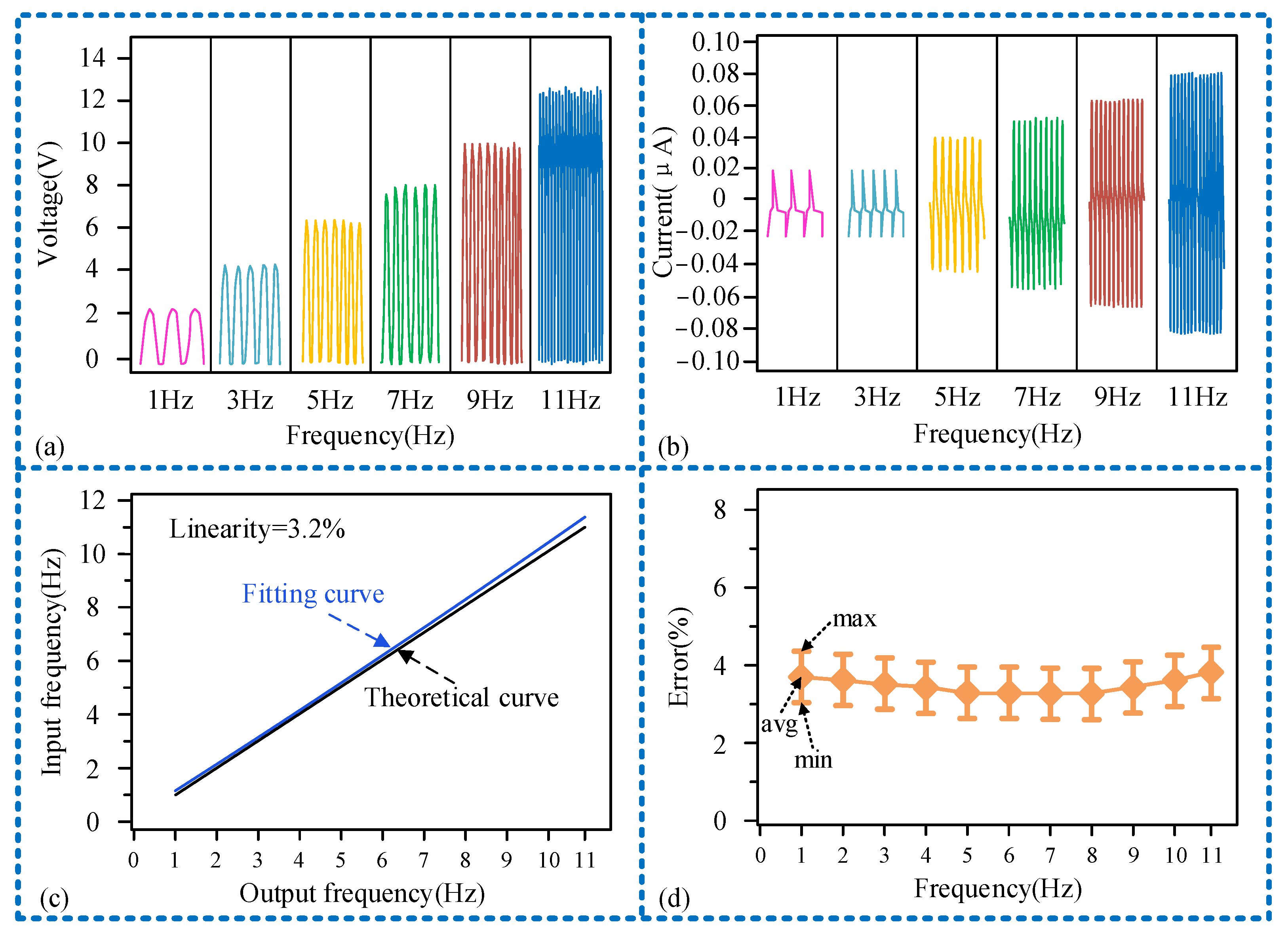
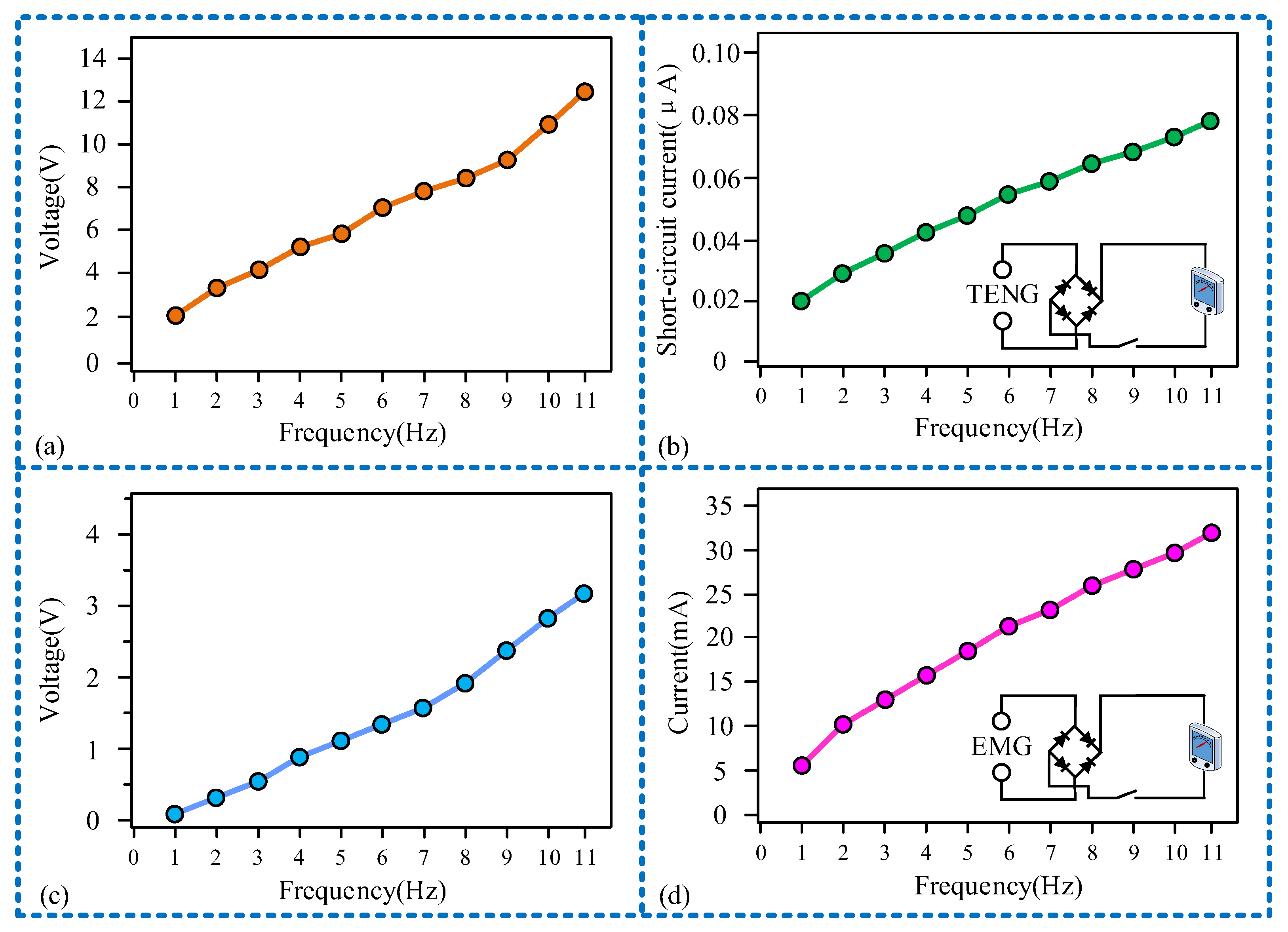
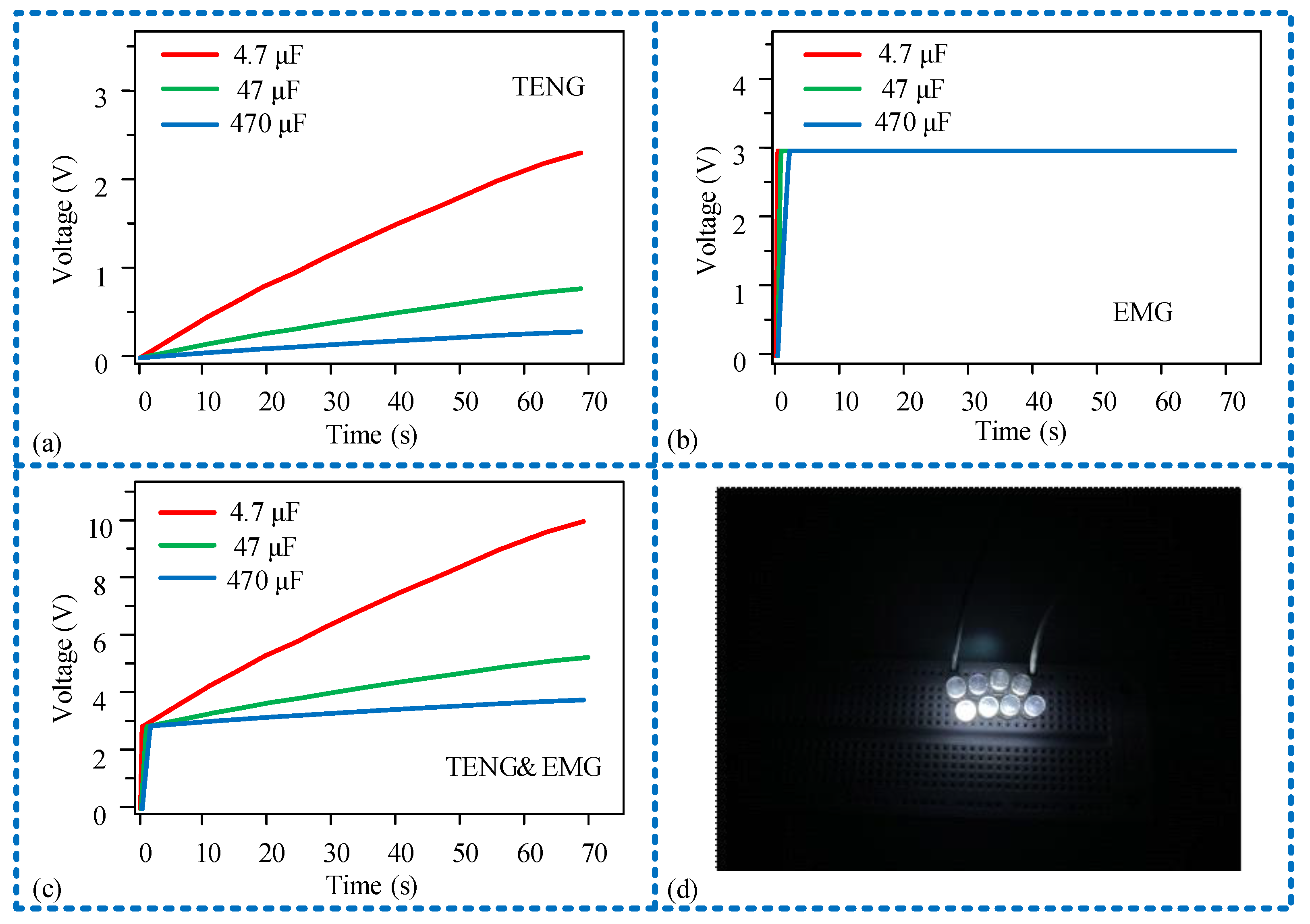
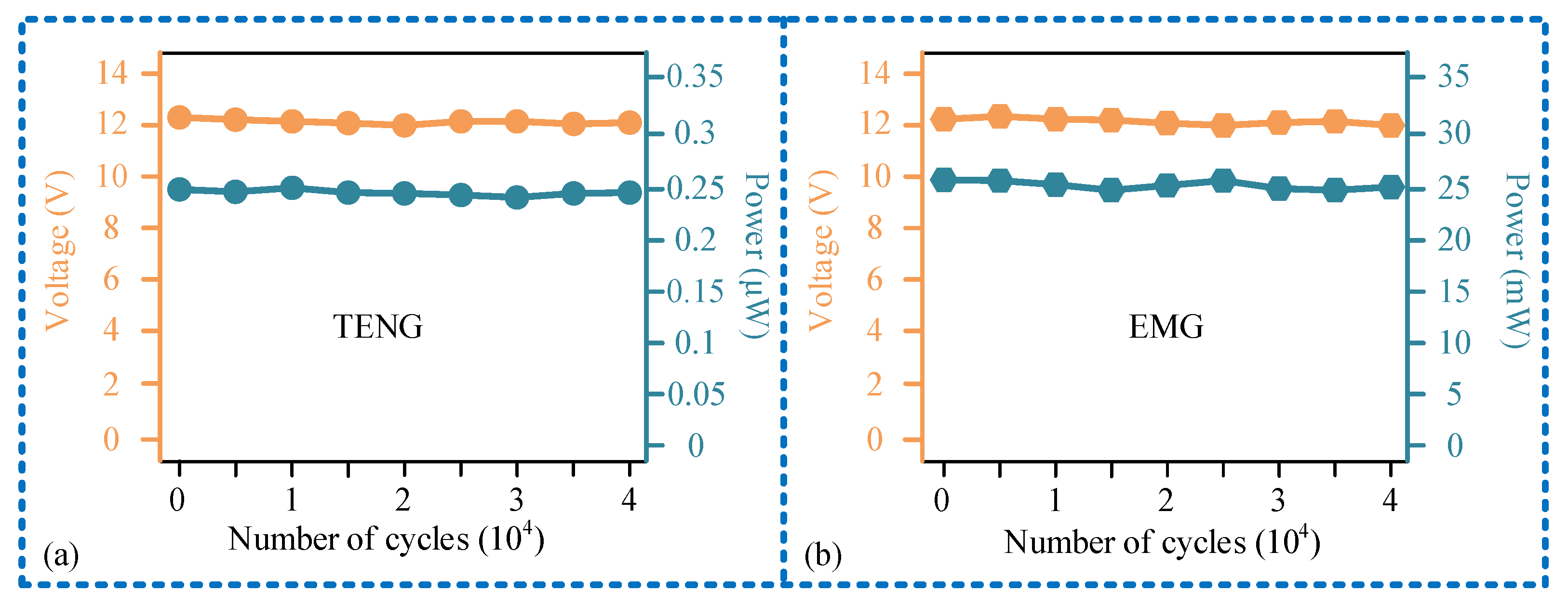
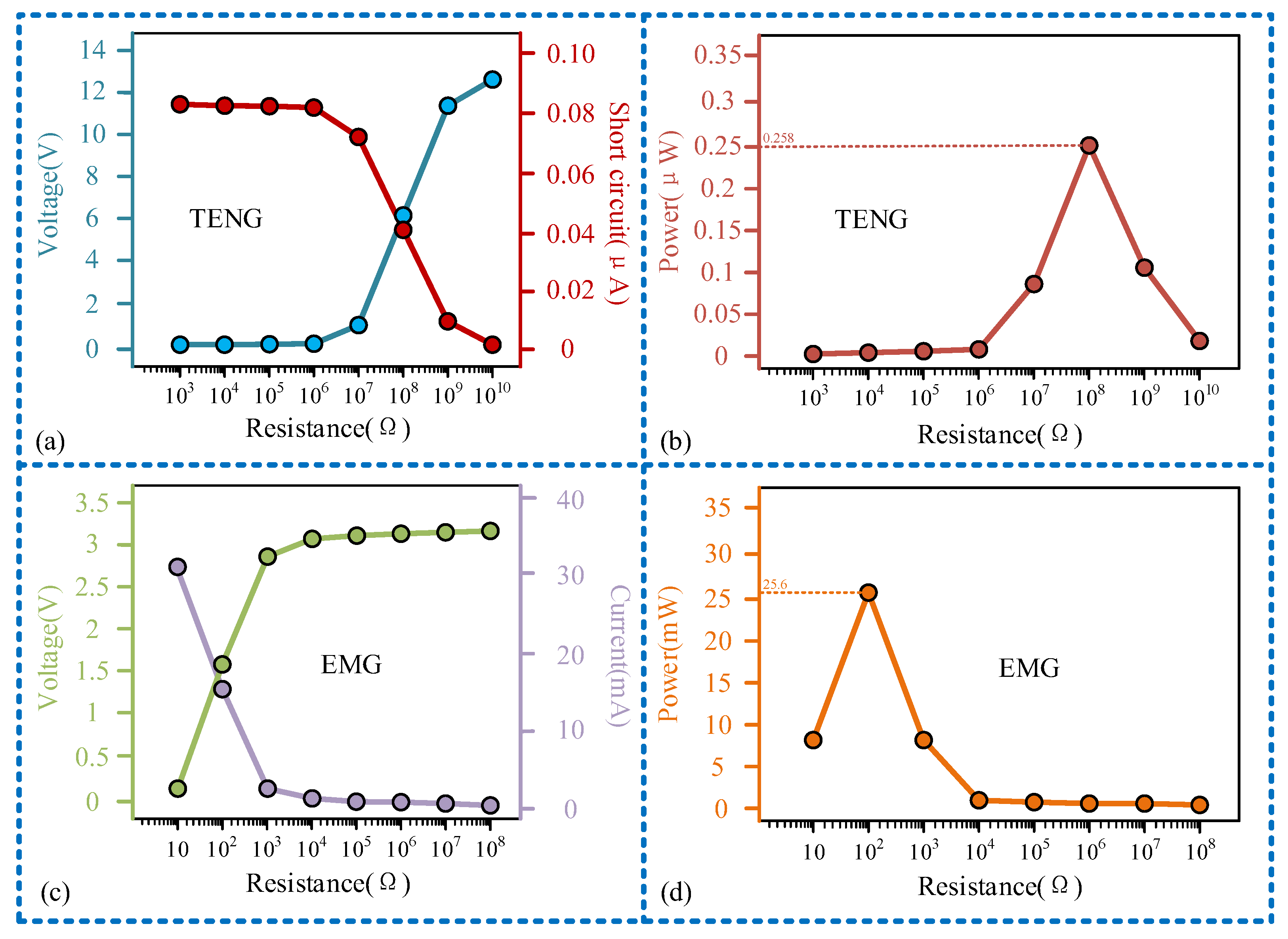
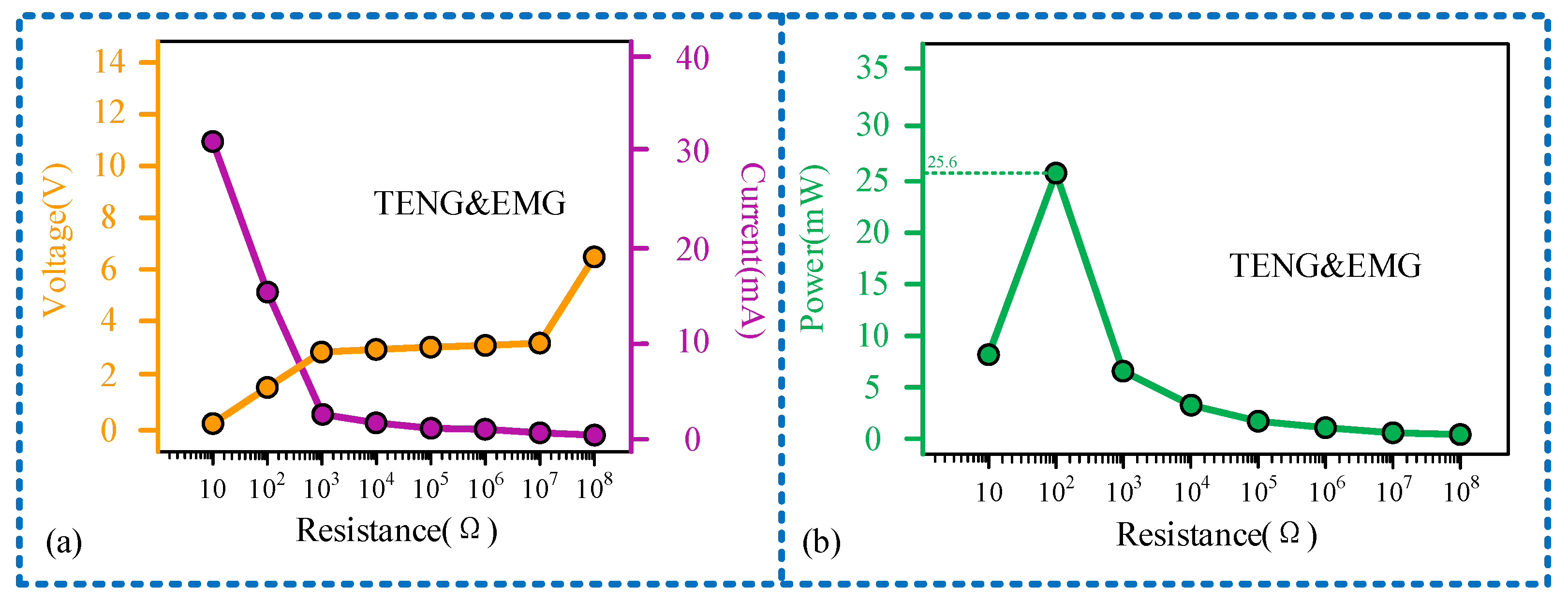
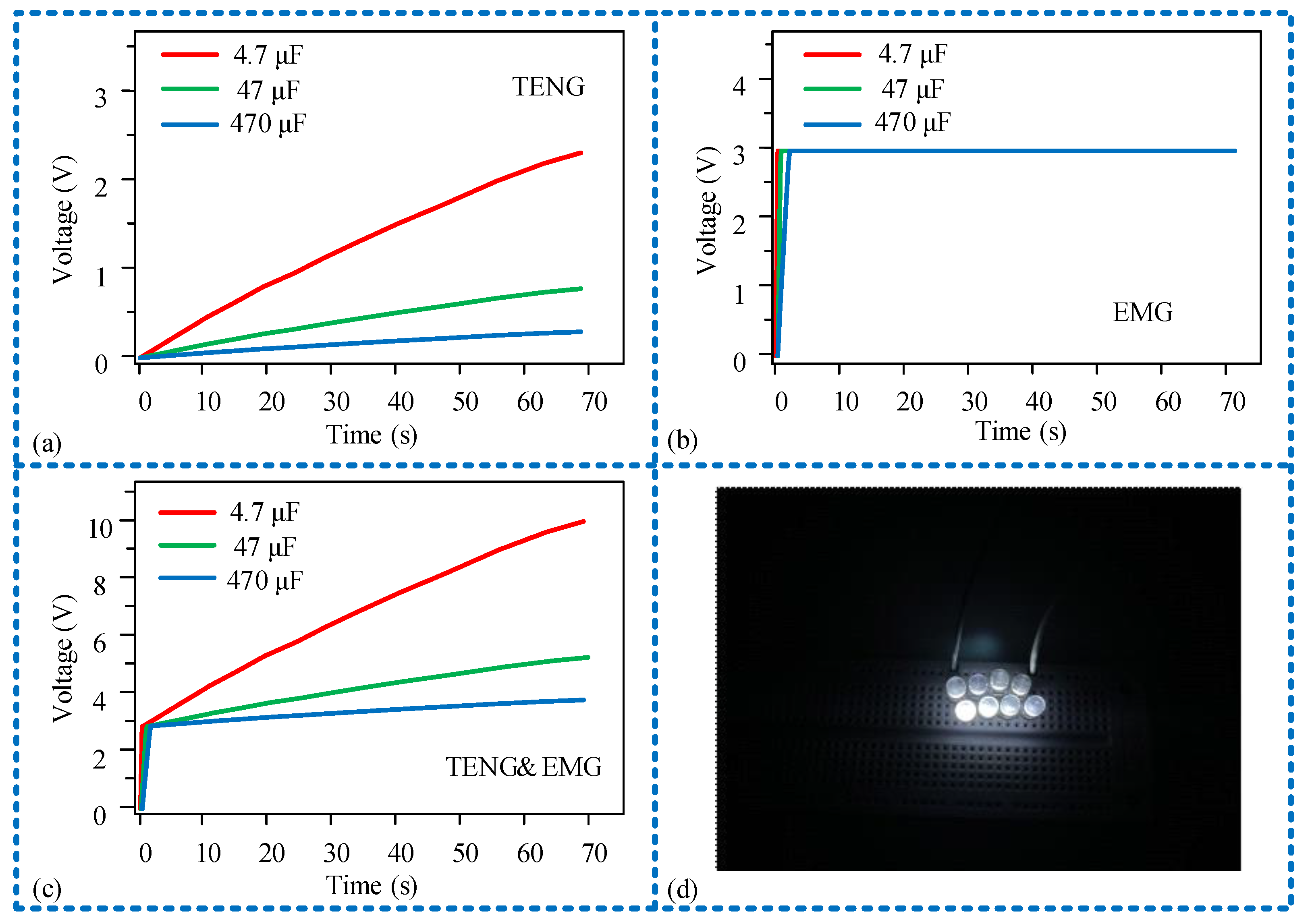
3.3. Research on Power Generation Performance
3.4. Research on Downhole Influencing Factors
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhou, Y.; Chen, X.; Wu, M.; Cao, W. A novel optimization method for geological drilling vertical well. Inf. Sci. 2023, 634, 550–563. [Google Scholar] [CrossRef]
- Mazurek, M.; Gimmi, T.; Zwahlen, C.; Aschwanden, L.; Gaucher, E.C.; Kiczka, M.; Rufer, D.; Wersin, P.; Fernandes, M.M.; Glaus, M.A.; et al. Swiss deep drilling campaign 2019–2022: Geological overview and rock properties with focus on porosity and pore-space architecture. Appl. Geochem. 2023, 159, 105839. [Google Scholar] [CrossRef]
- Srivastava, S.; Shah, R.N.; Teodoriu, C.; Sharma, A. Impact of data quality on supervised machine learning: Case study on drilling vibrations. J. Pet. Sci. Eng. 2022, 219, 111058. [Google Scholar] [CrossRef]
- Srivastava, S.; Shah, R.N.; Teodoriu, C.; Sharma, A. Investigating Drillstring Vibration and Stability in Coring Drilling. Energies 2022, 15, 5234. [Google Scholar] [CrossRef]
- Wiercigroch, M.; Nandakumar, K.; Pei, L.; Kapitaniak, M.; Vaziri, V. State dependent delayed drill-string vibration: Theory, experiments and new model. Procedia IUTAM 2017, 22, 39–50. [Google Scholar] [CrossRef]
- de Moraes, L.P.P.; Savi, M.A. Drill-string vibration analysis considering an axial-torsional-lateral nonsmooth model. J. Sound Vib. 2019, 438, 220–237. [Google Scholar] [CrossRef]
- Xue, Q.; Leung, H.; Wang, R.; Liu, B.; Wu, Y. Continuous real-time measurement of drilling trajectory with new state-space models of Kalman filter. IEEE Trans. Instrum. Meas. 2015, 65, 144–154. [Google Scholar] [CrossRef]
- Samuel, R. Kick Detection Using Downhole Accelerometer Data. J. Energy Resour. Technol. 2020, 142, 082901. [Google Scholar] [CrossRef]
- Lines, L.A.; Mauldin, C.L.; Hill, J.W.; Aiello, R.A. Advanced Drilling Dynamics Sensor Allows Real-Time Drilling Optimization, Damage Prevention and Condition Monitoring of RSS and LWD BHAs. In Proceedings of the SPE Annual Technical Conference and Exhibition. Society of Petroleum Engineers, 2014: SPE-170586-MS, Amsterdam, The Netherlands, 27–29 October 2014. [Google Scholar]
- Baumgartner, T.; Ashok, P.; van Oort, E. Automated Preprocessing Techniques for High Frequency Downhole Sensor Data. In Proceedings of the SPE/IADC International Drilling Conference and Exhibition, The Hague, The Netherlands, 5–7 March 2019. [Google Scholar]
- Saadeldin, R.; Gamal, H.; Elkatatny, S. Detecting downhole vibrations through drilling horizontal sections: Machine learning study. Sci. Rep. 2023, 13, 6204. [Google Scholar] [CrossRef]
- Srivastava, S.; Sharma, A.; Teodoriu, C. Optimizing sampling frequency of surface and downhole measurements for efficient stick-slip vibration detection. Petroleum 2024, 10, 30–38. [Google Scholar] [CrossRef]
- He, J.; Fan, X.; Mu, J.; Wang, C.; Qian, J.; Li, X.; Hou, X.; Geng, W.; Wang, X.; Chou, X. 3D full-space triboelectric-electromagnetic hybrid nanogenerator for high-efficient mechanical energy harvesting in vibration system. Energy 2020, 194, 116871. [Google Scholar] [CrossRef]
- Li, S.; Liu, D.; Zhao, Z.; Zhou, L.; Yin, X.; Li, X.; Gao, Y.; Zhang, C.; Zhang, Q.; Wang, J.; et al. A fully self-powered vibration monitoring system driven by dual-mode triboelectric nanogenerators. ACS Nano 2020, 14, 2475–2482. [Google Scholar] [CrossRef] [PubMed]
- Yang, H.; Deng, M.; Zeng, Q.; Zhang, X.; Hu, J.; Tang, Q.; Yang, H.; Hu, C.; Xi, Y.; Wang, Z.L. Polydirectional microvibration energy collection for self-powered multifunctional systems based on hybridized nanogenerators. ACS Nano 2020, 14, 3328–3336. [Google Scholar] [CrossRef]
- Liu, C.; Wang, Y.; Zhang, N.; Yang, X.; Wang, Z.; Zhao, L.; Yang, W.; Dong, L.; Che, L.; Wang, G.; et al. A self-powered and high sensitivity acceleration sensor with VQa model based on triboelectric nanogenerators (TENGs). Nano Energy 2020, 67, 104228. [Google Scholar] [CrossRef]
- Zhang, B.; Zhang, L.; Deng, W.; Jin, L.; Chun, F.; Pan, H.; Gu, B.; Zhang, H.; Lv, Z.; Yang, W.; et al. Self-powered acceleration sensor based on liquid metal triboelectric nanogenerator for vibration monitoring. ACS Nano 2017, 11, 7440–7446. [Google Scholar] [CrossRef] [PubMed]
- Dai, K.; Wang, X.; Yi, F.; Jiang, C.; Li, R.; You, Z. Triboelectric nanogenerators as self-powered acceleration sensor under high-g impact. Nano Energy 2018, 45, 84–93. [Google Scholar] [CrossRef]
- Wang, Z.; An, J.; Nie, J.; Luo, J.; Shao, J.; Jiang, T.; Chen, B.; Tang, W.; Wang, Z.L. A Self-powered angle sensor at nanoradian-resolution for robotic arms and personalized medicare. Adv. Mater. 2020, 32, 2001466. [Google Scholar] [CrossRef] [PubMed]
- Teng, C.; Chio, C.H.; Tam, K.W.; Lau, P.Y. An Angular Displacement Microwave Sensor With 360° Dynamic Range Using Multi-Mode Resonator. IEEE Sens. J. 2020, 21, 2899–2907. [Google Scholar] [CrossRef]
- Pu, X.; Guo, H.; Tang, Q.; Chen, J.; Feng, L.; Liu, G.; Wang, X.; Xi, Y.; Hu, C.; Wang, Z.L. Rotation sensing and gesture control of a robot joint via triboelectric quantization sensor. Nano Energy 2018, 54, 453–460. [Google Scholar] [CrossRef]
- Jiao, H.; Lin, X.; Xiong, Y.; Han, J.; Liu, Y.; Yang, J.; Wu, S.; Jiang, T.; Wang, Z.L.; Sun, Q. Thermal insulating textile based triboelectric nanogenerator for outdoor wearable sensing and interaction. Nano Energy 2024, 120, 109134. [Google Scholar] [CrossRef]
- Li, C.; Wang, Z.; Shu, S.; Tang, W. A Self-Powered Vector Angle/Displacement Sensor Based on Triboelectric Nanogenerator. Micromachines 2021, 12, 231. [Google Scholar] [CrossRef] [PubMed]
- Yu, H.; He, X.; Ding, W.; Hu, Y.; Yang, D.; Lu, S.; Wu, C.; Zou, H.; Liu, R.; Lu, C.; et al. A self-powered dynamic displacement monitoring system based on triboelectric accelerometer. Adv. Energy Mater. 2017, 7, 1700565. [Google Scholar] [CrossRef]
- Lin, Z.; Zhang, B.; Guo, H.; Wu, Z.; Zou, H.; Yang, J.; Wang, Z.L. Super-robust and frequency-multiplied triboelectric nanogenerator for efficient harvesting water and wind energy. Nano Energy 2019, 64, 103908. [Google Scholar] [CrossRef]
- Liu, G.; Guo, H.; Xu, S.; Hu, C.; Wang, Z.L. Oblate spheroidal triboelectric nanogenerator for all-weather blue energy harvesting. Adv. Energy Mater. 2019, 9, 1900801. [Google Scholar] [CrossRef]
- Li, Y.; Liu, X.; Ren, Z.; Luo, J.; Zhang, C.; Cao, C.; Yuan, H.; Pang, Y. Marine Biomaterial-based Triboelectric Nanogenerators: Insights and Applications. Nano Energy 2023, 109046. [Google Scholar] [CrossRef]
- Yang, K.; Wang, J.; Yurchenko, D. A double-beam piezo-magneto-elastic wind energy harvester for improving the galloping-based energy harvesting. Appl. Phys. Lett. 2019, 115, 193901. [Google Scholar] [CrossRef]
- Wang, X.; Ye, C.; Chen, P.; Pang, H.; Wei, C.; Duan, Y.; Jiang, T.; Wang, Z.L. Achieving High Power Density and Durability of Multilayered Swing-Structured Triboelectric Nanogenerator toward Marine Environmental Protection. Adv. Funct. Mater. 2024, 34, 2311196. [Google Scholar] [CrossRef]
- Zhao, L.C.; Zou, H.X.; Yan, G.; Liu, F.-R.; Tan, T.; Wei, K.-X.; Zhang, W. Magnetic coupling and flextensional amplification mechanisms for high-robustness ambient wind energy harvesting. Energy Convers. Manag. 2019, 201, 112166. [Google Scholar] [CrossRef]
- Zhang, J.; Fang, Z.; Shu, C.; Zhang, J.; Zhang, Q.; Li, C. A rotational piezoelectric energy harvester for efficient wind energy harvesting. Sens. Actuators A Phys. 2017, 262, 123–129. [Google Scholar] [CrossRef]
- He, T.; Wang, H.; Wang, J.; Tian, X.; Wen, F.; Shi, Q.; Ho, J.S.; Lee, C. Self-sustainable wearable textile nano-energy nano-system (NENS) for next-generation healthcare applications. Adv. Sci. 2019, 6, 1901437. [Google Scholar] [CrossRef]
- Lee, Y.; Kim, J.; Jang, B.; Kim, S.; Sharma, B.K.; Kim, J.-H.; Ahn, J.-H. Graphene-based stretchable/wearable self-powered touch sensor. Nano Energy 2019, 62, 259–267. [Google Scholar] [CrossRef]
- Yang, H.; Liu, W.; Xi, Y.; Lai, M.; Guo, H.; Liu, G.; Wang, M.; Li, T.; Ji, X.; Li, X. Rolling friction contact-separation mode hybrid triboelectric nanogenerator for mechanical energy harvesting and self-powered multifunctional sensors. Nano Energy 2018, 47, 539–546. [Google Scholar] [CrossRef]
- Gou, Y.; Fu, X. Vibration and horizontal directivity analysis of transmitting transducer for acoustic logging while drilling. J. Geophys. Eng. 2021, 18, 379–391. [Google Scholar] [CrossRef]
- Guo, X.; He, J.; Zheng, Y.; Wu, J.; Pan, C.; Zi, Y.; Cui, H.; Li, X. High-performance triboelectric nanogenerator based on theoretical analysis and ferroelectric nanocomposites and its high-voltage applications. Nano Res. Energy 2023, 2, e9120074. [Google Scholar] [CrossRef]
- Du, T.; Dong, F.; Xu, R.; Zou, Y.; Wang, H.; Jiang, X.; Xi, Z.; Yuan, H.; Zhang, Y.; Sun, P.; et al. A Drill Pipe-Embedded Vibration Energy Harvester and Self-Powered Sensor Based on Annular Type Triboelectric Nanogenerator for Measurement while Drilling System. Adv. Mater. Technol. 2022, 7, 2200003. [Google Scholar] [CrossRef]
- Zhou, Q.; Huang, H.; Wu, C.; Wen, G.; Liu, B. A self-powered sensor for drill pipe capable of monitoring rotation speed and direction based on triboelectric nanogenerator. Rev. Sci. Instrum. 2021, 92, 055006. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Tooth Number | Transmission Ratio (between the Upper and Lower Devices) |
|---|---|---|
| Lower slide block rack | 12 | |
| 3/2 | ||
| Pinion | 18 | |
| 1/4 | ||
| Large gear | 72 | |
| 4/1 | ||
| Pawl with gear | 18 | |
| 1/1 | ||
| ratchet | 24 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, R.; Ren, J.; Ding, W.; Liu, M.; Pan, G.; Wu, C. Research on Vibration Accumulation Self-Powered Downhole Sensor Based on Triboelectric Nanogenerators. Micromachines 2024, 15, 548. https://doi.org/10.3390/mi15040548
Wang R, Ren J, Ding W, Liu M, Pan G, Wu C. Research on Vibration Accumulation Self-Powered Downhole Sensor Based on Triboelectric Nanogenerators. Micromachines. 2024; 15(4):548. https://doi.org/10.3390/mi15040548
Chicago/Turabian StyleWang, Rui, Jianchao Ren, Weibo Ding, Maofu Liu, Guangzhi Pan, and Chuan Wu. 2024. "Research on Vibration Accumulation Self-Powered Downhole Sensor Based on Triboelectric Nanogenerators" Micromachines 15, no. 4: 548. https://doi.org/10.3390/mi15040548
APA StyleWang, R., Ren, J., Ding, W., Liu, M., Pan, G., & Wu, C. (2024). Research on Vibration Accumulation Self-Powered Downhole Sensor Based on Triboelectric Nanogenerators. Micromachines, 15(4), 548. https://doi.org/10.3390/mi15040548