
Distance Measurement of Contra-Rotating Rotor Blades with Ultrasonic Transducers
 , ,
, ,
Abstract
:1. Introduction
2. Distance Measurement Method
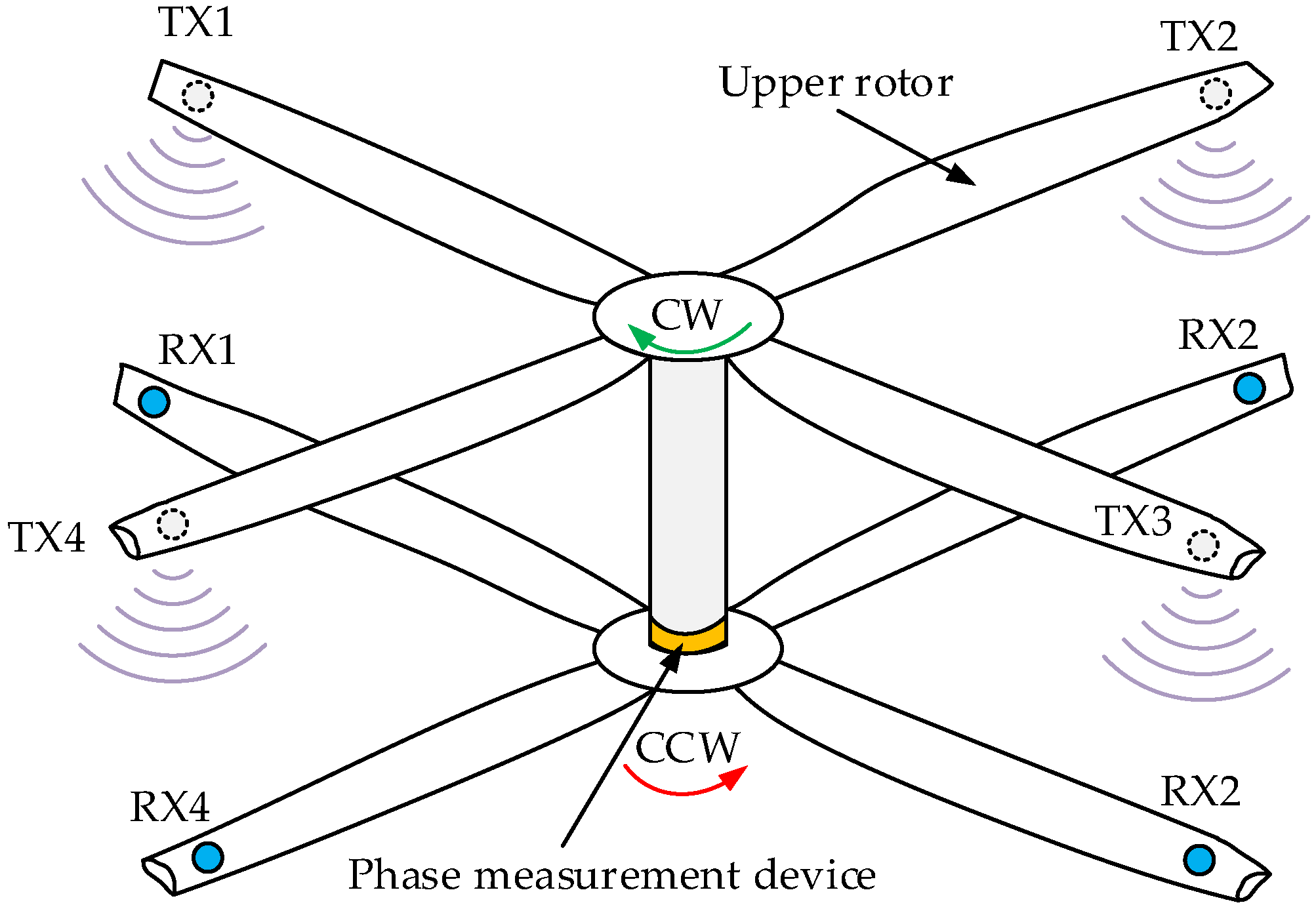
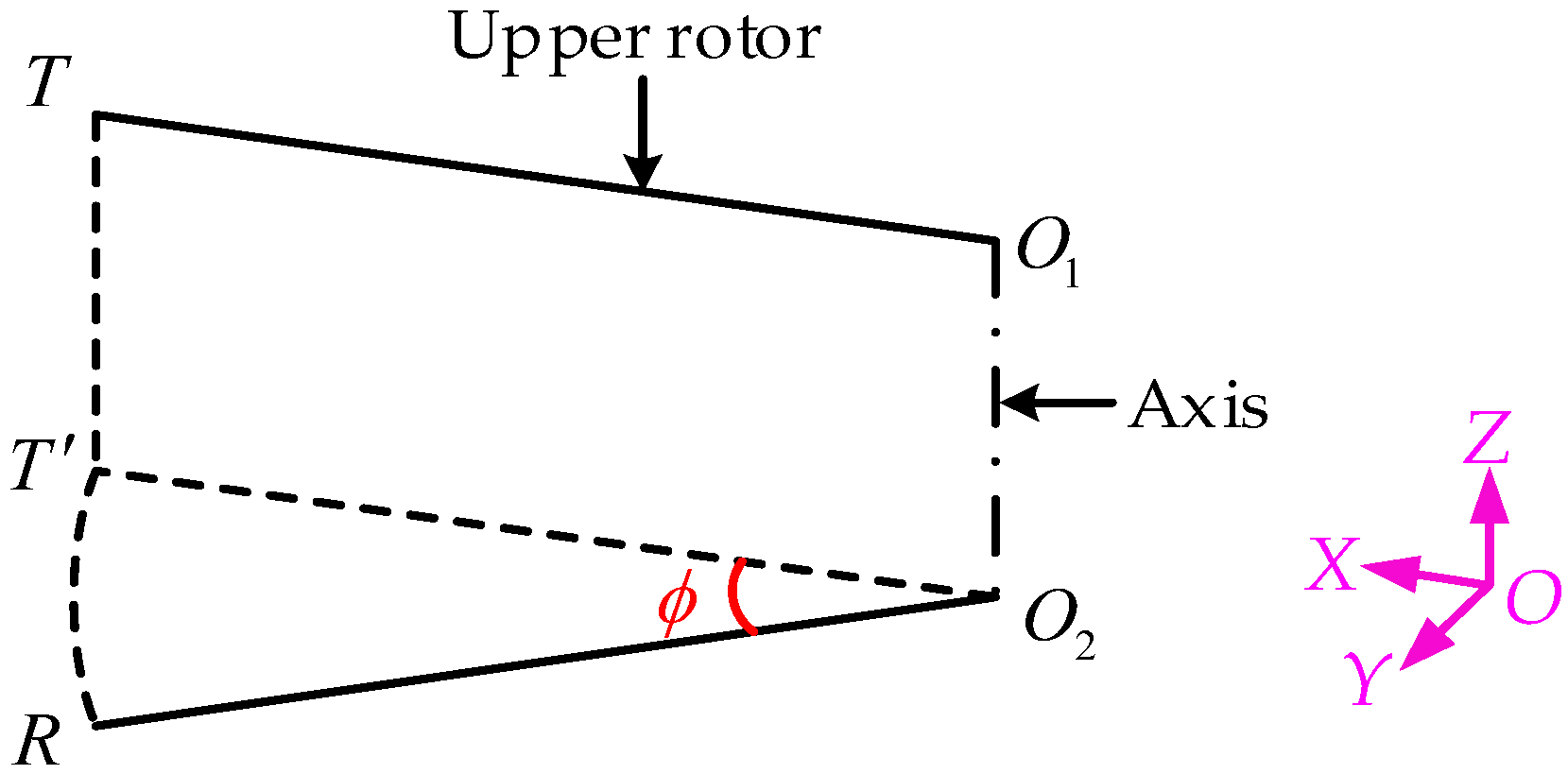
2.1. Sensor Arrangement and Measurement System
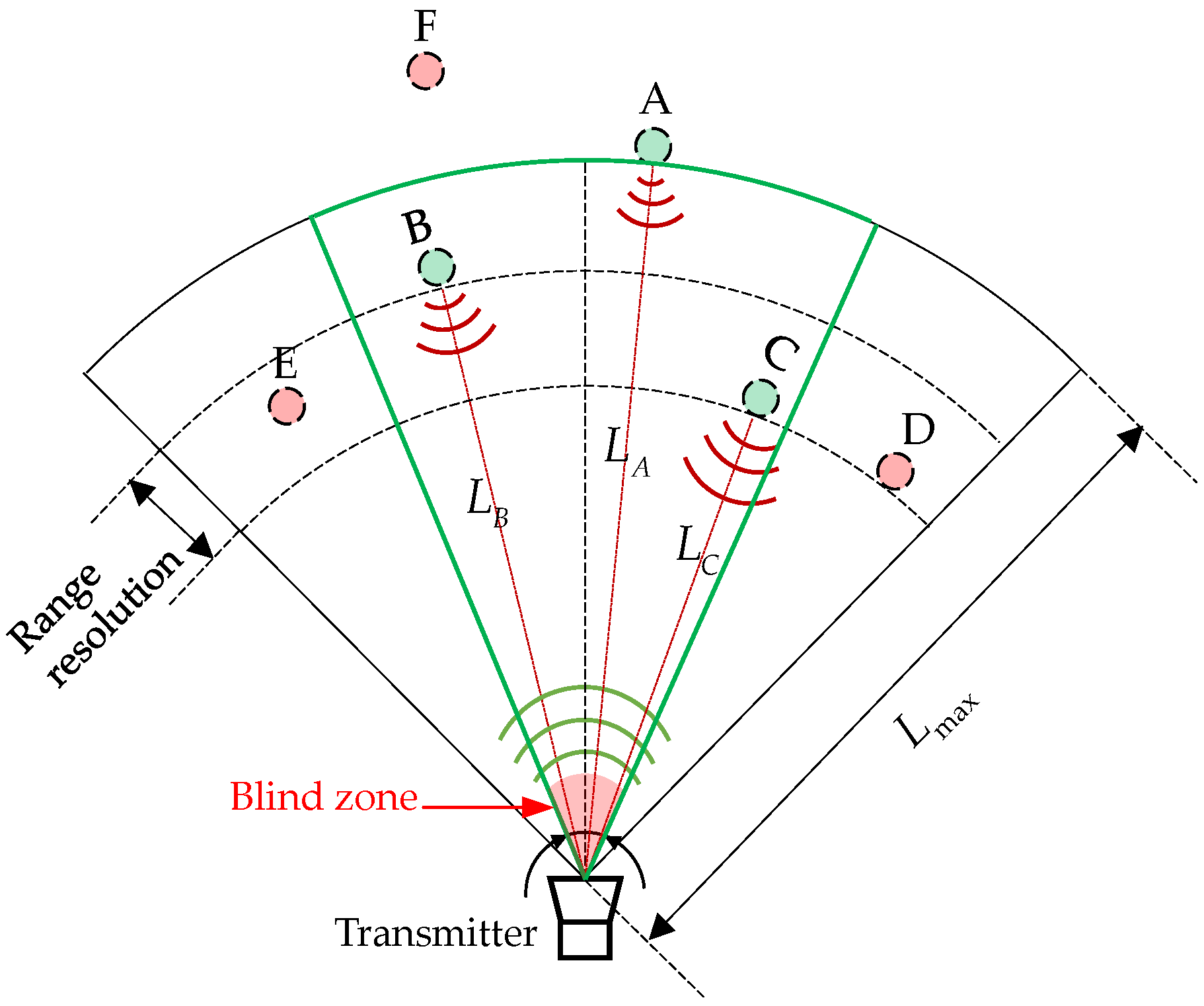
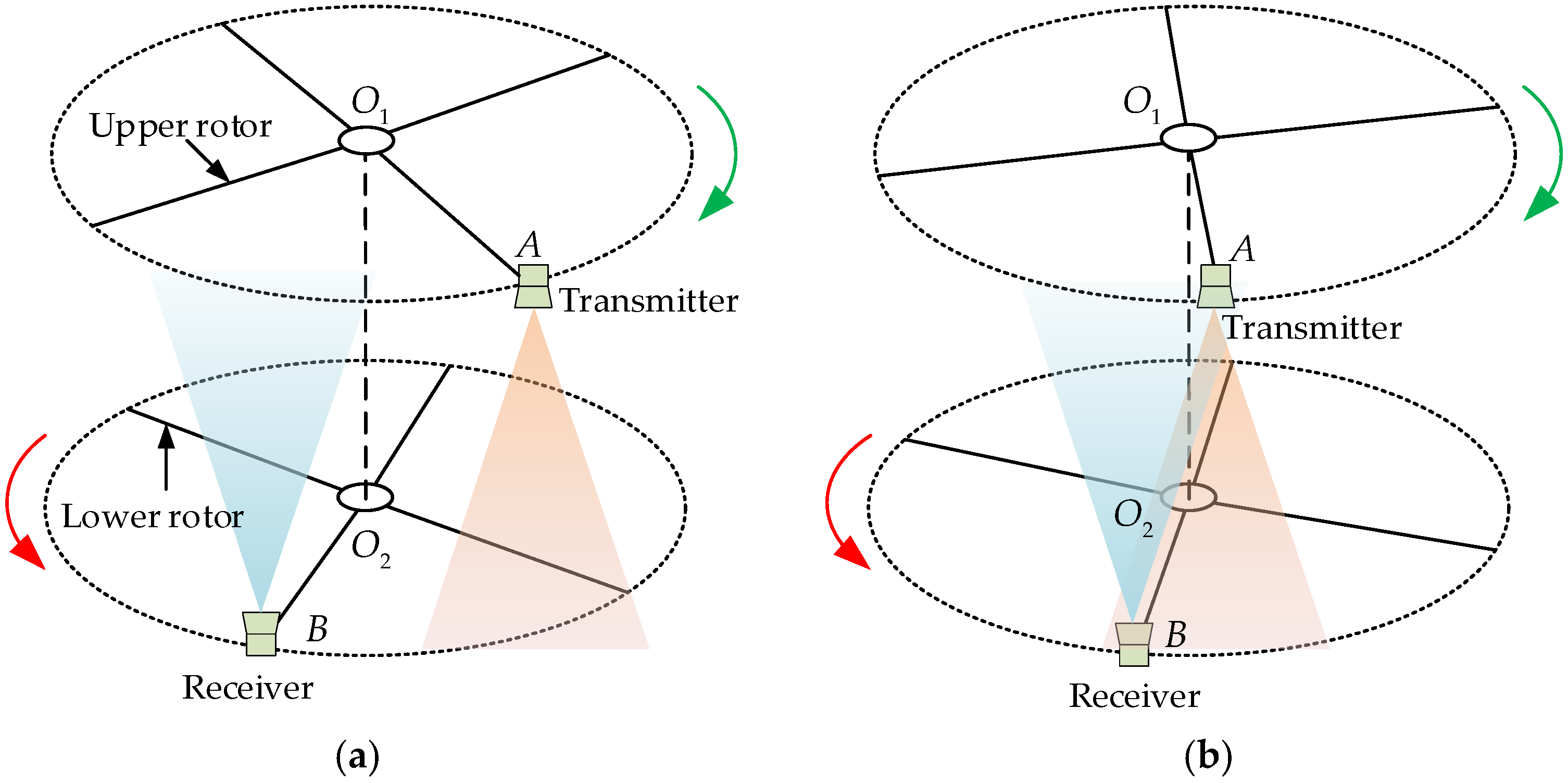
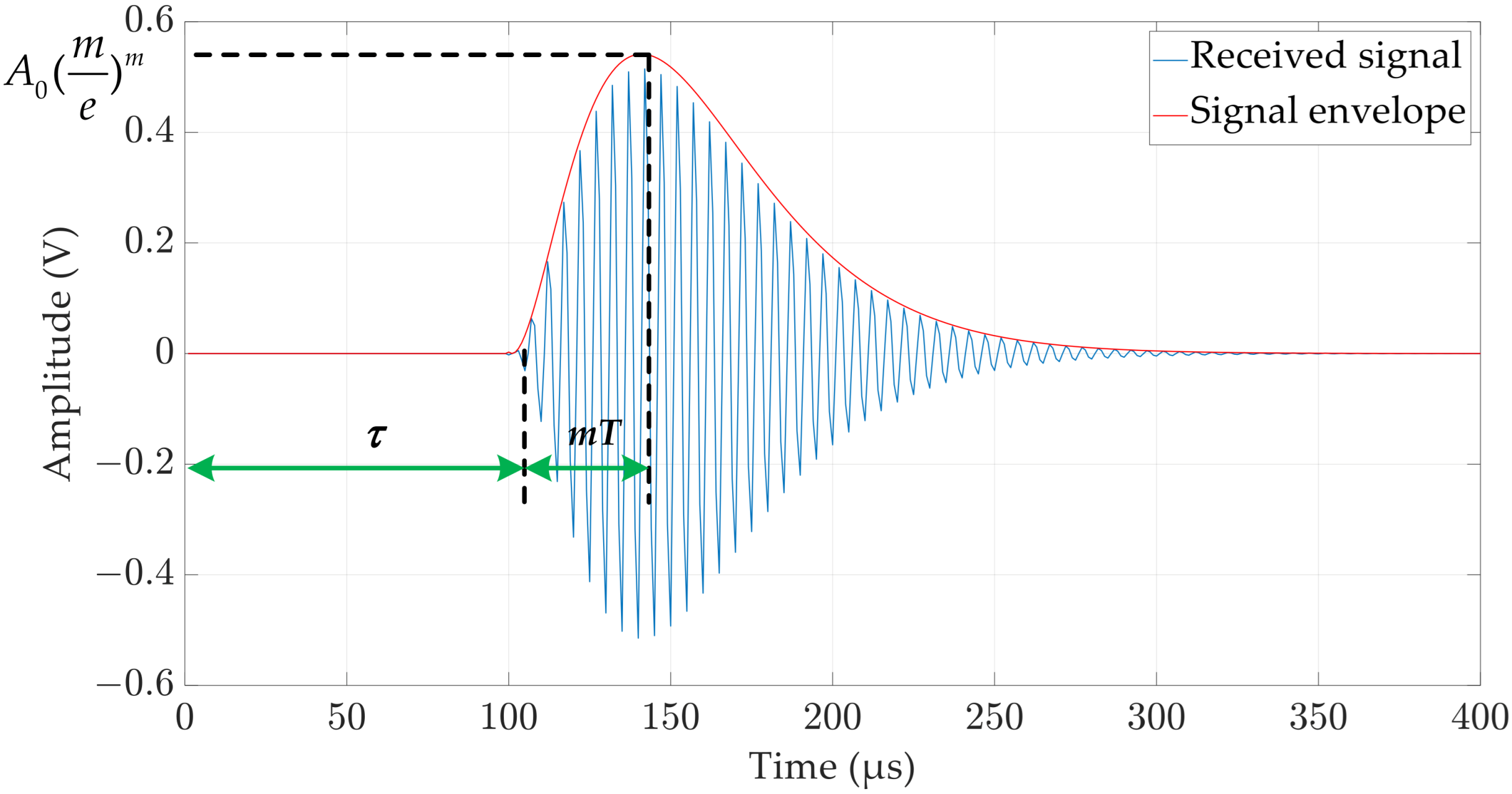
2.2. The Conception of Ultrasonic Distance Measurement Window
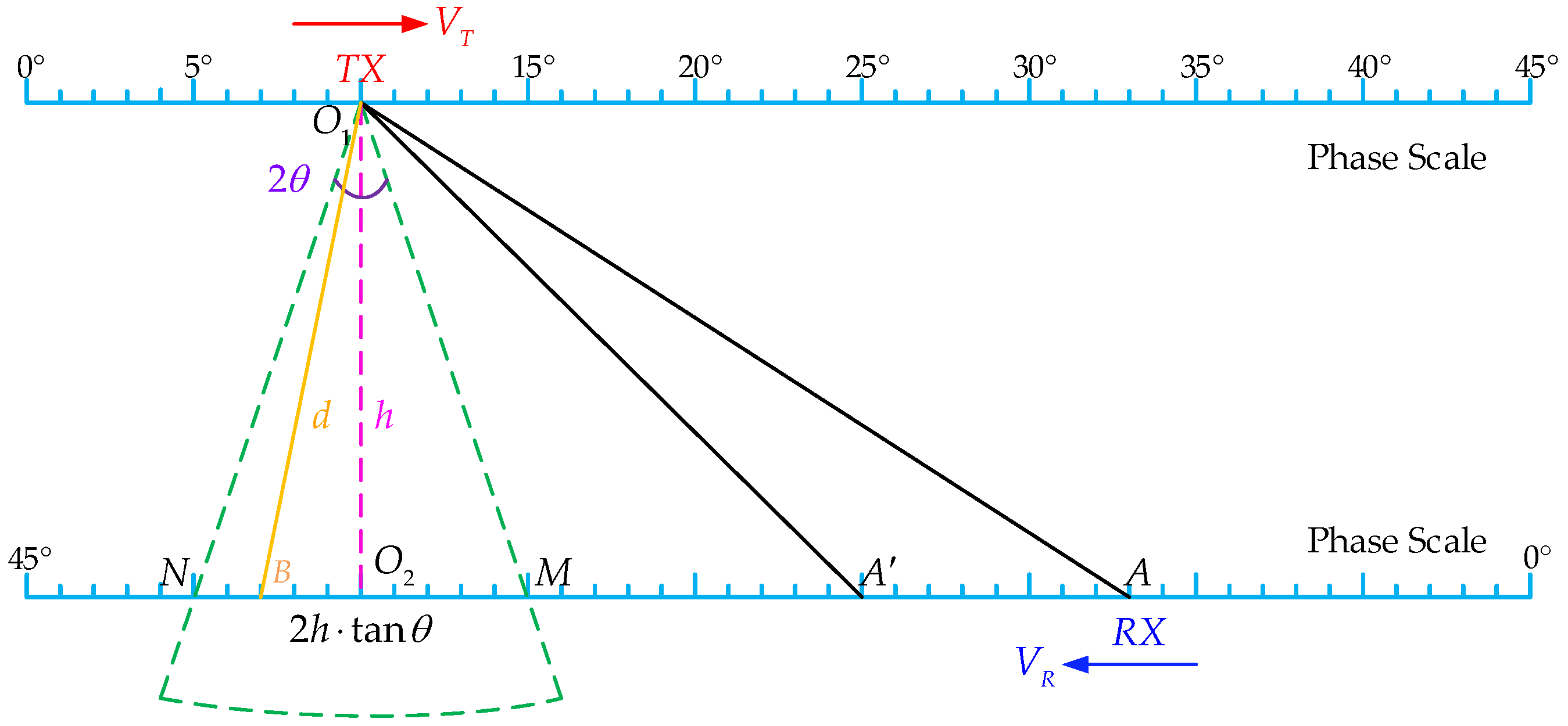
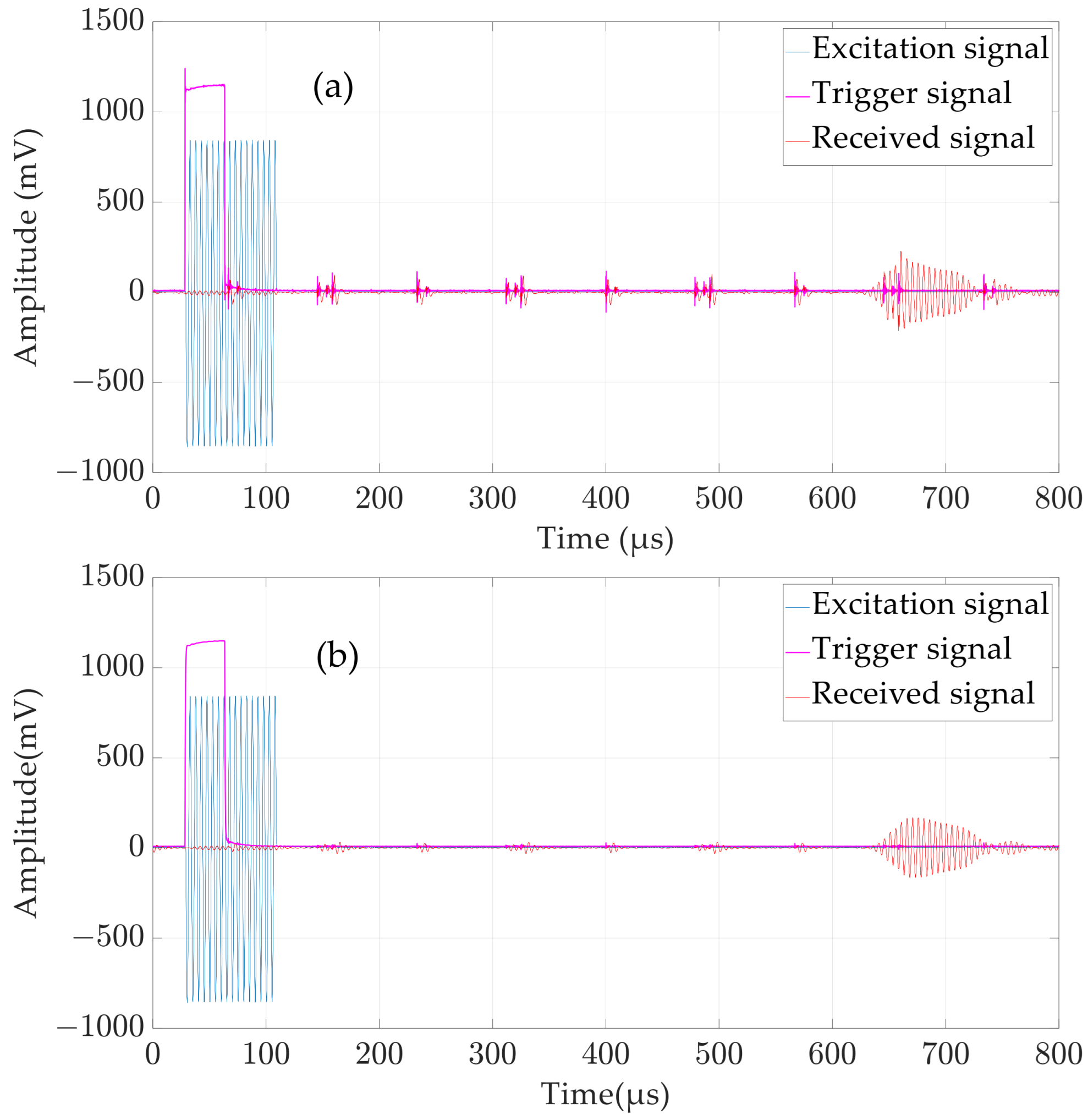
2.3. Trigger Timing
3. Signal Processing
3.1. Denoising
3.2. Distance Calculation
3.2.1. TOF Estimation
- (1)
- Select the window width N and sliding unit step step. The window width depends on the typical length of the received signal, and the sliding unit step should not be set too large (set as 1 in this study).
- (2)
- Determine the start and end point of the window. The start point depends on the trigger signal of the angular encoder and the end point is decided by the farthest measurement distance.
- (3)
- Calculate the power density of the received signal in windows 1 to .
- (4)
- Take the serial number of the window with the highest power density, written as .
- (5)
- Determine whether the window with the highest power density is significantly larger than the window where the general noise is located and record the window serial number if it is larger; otherwise, it is considered that there is no received signal in this measurement. In this study, the definition of whether it is significantly greater is whether the power density of the window in which the maximum power density is located is greater than 2 times the average of all windows.
- (6)
- Calculate the TOF using the following equation:
3.2.2. Ultrasonic Velocity Compensation
4. Experiments and Result Discussion
4.1. Experiment Set-Up
4.2. Results of the Ranging
4.2.1. Signal Timing and Denoising
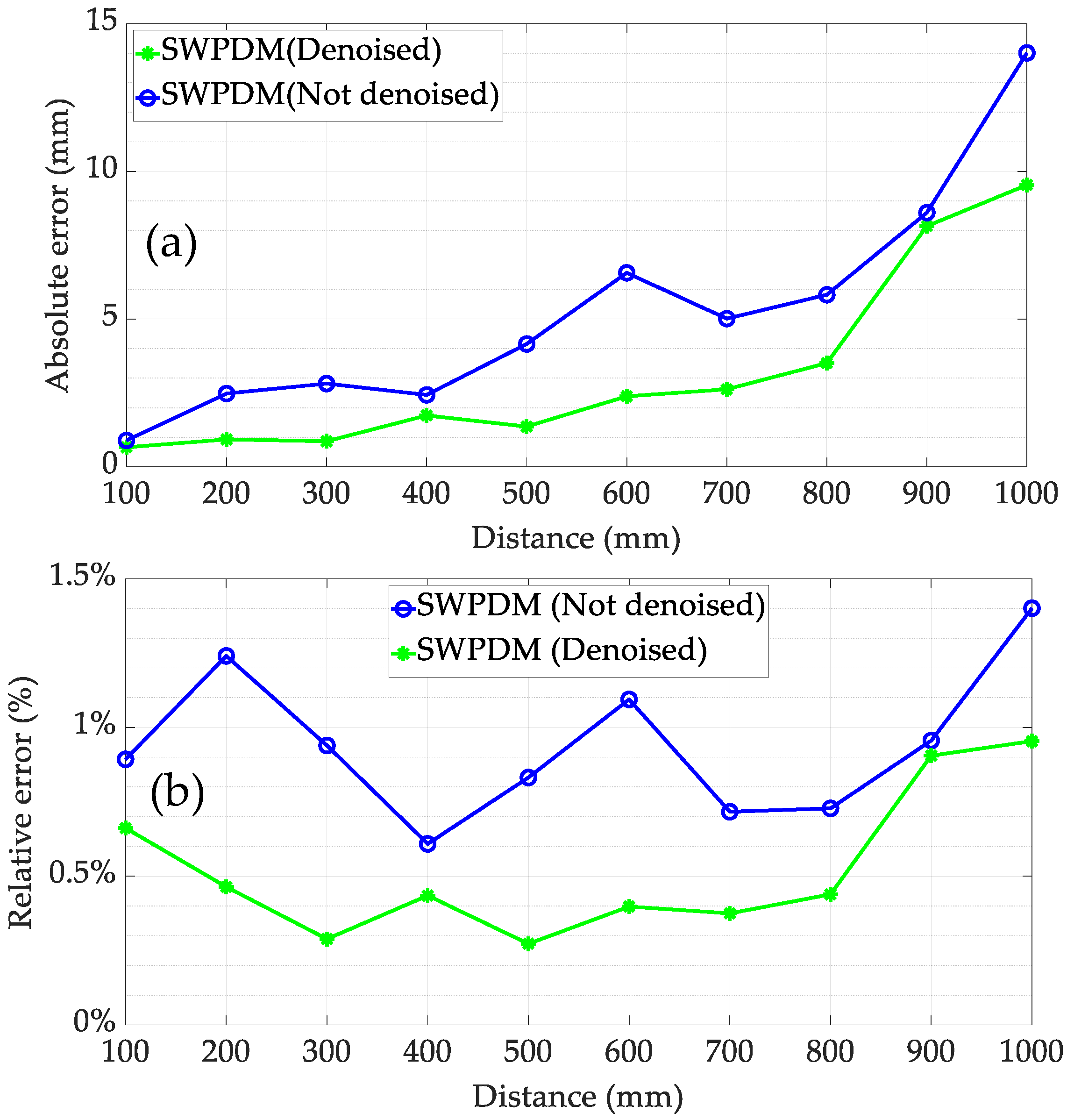
4.2.2. Ranging Results and Error Analysis
5. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Qi, H.; Xu, G.; Lu, C.; Shi, Y. A study of coaxial rotor aerodynamic interaction mechanism in hover with high-efficient trim model. Aerosp. Sci. Technol. 2019, 84, 1116–1130. [Google Scholar] [CrossRef]
- Kapoor, D.; Deb, D.; Sahai, A.; Bangar, H. Adaptive failure compensation for coaxial rotor helicopter under propeller failure. In Proceedings of the American Control Conference 2012, Montreal, Canada, 27–29 June 2012; pp. 2539–2544. [Google Scholar]
- Kim, H.W.; Brown, R.E. A Comparison of Coaxial and Conventional Rotor Performance. J. Am. Helicopter Soc. 2010, 55, 12004–1200420. [Google Scholar] [CrossRef]
- Prior, S.D. Reviewing and Investigating the Use of Co-Axial Rotor Systems in Small UAVs. Int. J. Micro Air Veh. 2010, 2, 1–16. [Google Scholar] [CrossRef]
- Hunter, D.H.; Thomas, J.; Beatty, R.D.; Tuozzo, N.C.; Egolf, T.A.; Lorber, P.F. Dual Rotor, Rotary Wing Aircraft. U.S. Patent US010822076B2, 3 November 2020. [Google Scholar]
- Schneider, O.; Wall, B.; Pengel, K. HART-II Blade Motion Measured by Stereo Pattern Recognition. In Proceedings of the 59th Annual Forum of the American Helicopter Society, Phoenix, AZ, USA, 6–8 May 2003. [Google Scholar]
- Olson, L.E.; Abrego, A.; Barrows, D.A.; Burner, A.W. Blade deflection measurements of a full scale UH-60A rotor system. In Proceedings of the American Helicopter Society Aeromechanics Specialist Conference, San Francisco, CA, USA, 20–22 January 2010. [Google Scholar]
- Pengel, K.; Mueller, R.H.; Wall, B.G.D. Stereo pattern recognition the technique for reliable rotor blade deformation and twist measurement. In Proceedings of the AHS International Meeting on Advanced Rotorcraft Technology and Life Saving Activities, Utsunomiya, Japan, 11–13 November 2002. [Google Scholar]
- Kim, S.B.; Geiger, D.; Bowles, P.O.; Matalanis, C.G.; Wake, B.E. Tip Displacement Estimation Using Fiber Optic Sensors for X2 TechnologyTM Rotor Blades. In Proceedings of the AHS 72nd Annual Forum, West Palm Beach, FL, USA, 17–19 May 2016. [Google Scholar]
- Suesse, S.; Hajek, M. Rotor Blade Displacement and Load Estimation with Fiber-Optical Sensors for a Future Health and Usage Monitoring System. In Proceedings of the AHS 74th Annual Forum, Phoenix, AZ, USA, 14–17 May 2018. [Google Scholar]
- Zhang, Z.; Qiu, Z.; Hu, W.; Lu, Y.; Zheng, W. Research on wingtip distance measurement of high-speed coaxial helicopter based on 77 GHz FMCW millimeter-wave radar. Meas. Sci. Technol. 2023, 34, 085111. [Google Scholar] [CrossRef]
- Patole, S.M.; Torlak, M.; Wang, D.; Ali, M. Automotive radars: A review of signal processing techniques. IEEE Signal Process. Mag. 2017, 34, 22–35. [Google Scholar] [CrossRef]
- Jackson, J.C.; Summan, R.; Dobie, G.I.; Whiteley, S.M.; Pierce, S.G.; Hayward, G. Time-of-flight measurement techniques for airborne ultrasonic ranging. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2013, 60, 343–355. [Google Scholar] [CrossRef] [PubMed]
- Qiu, Z.; Lu, Y.; Qiu, Z. Review of ultrasonic ranging methods and their current challenges. Micromachines 2022, 13, 520. [Google Scholar] [CrossRef] [PubMed]
- Wu, J.; Zhu, J.; Yang, L.; Shen, M.; Xue, B.; Liu, Z. A highly accurate ultrasonic ranging method based on onset extraction and phase shift detection. Measurement 2014, 47, 433–441. [Google Scholar] [CrossRef]
- Laureti, S.; Mercuri, M.; Hutchins, D.A.; Crupi, F.; Ricci, M. Modified FMCW Scheme for Improved Ultrasonic Positioning and Ranging of Unmanned Ground Vehicles at Distances < 50 mm. Sensors 2022, 22, 9899. [Google Scholar] [CrossRef] [PubMed]
- Prado, T.d.A.; Moura, H.L.; Passarin, T.A.; Guarneri, G.A.; Pires, G.P.; Pipa, D.R. A straightforward method to evaluate the directivity function of ultrasound imaging systems. NDT E Int. 2021, 119, 102402. [Google Scholar] [CrossRef]
- Wooh, S.-C.; Shi, Y. Three-dimensional beam directivity of phase-steered ultrasound. J. Acoust. Soc. Am. 1999, 105, 3275–3282. [Google Scholar] [CrossRef]
- Drinkwater, B.W.; Wilcox, P.D. Ultrasonic arrays for non-destructive evaluation: A review. NDT E Int. 2006, 39, 525–541. [Google Scholar] [CrossRef]
- Cobbold, R.S.C. Foundations of Biomedical Ultrasound; Oxford University Press (OUP): Oxford, UK, 2006. [Google Scholar]
- Mu, W.-Y.; Zhang, G.-P.; Huang, Y.-M.; Yang, X.-G.; Liu, H.-Y.; Yan, W. Omni-Directional Scanning Localization Method of a Mobile Robot Based on Ultrasonic Sensors. Sensors 2016, 16, 2189. [Google Scholar] [CrossRef] [PubMed]
- Moravec, H.; Elfes, A. High Resolution Maps from Wide Angle Sonar; IEEE: Piscataway, NJ, USA, 1985. [Google Scholar]
- Je, Y. A highly-directional ultrasonic range sensor using a stepped-plate transducer. In Proceedings of the 17th World Congress, the International Federation of Automatic Control, Seoul, Republic of Korea, 6–11 July 2008. [Google Scholar]
- Sabatini, A. Correlation receivers using Laguerre filter banks for modelling narrowband ultrasonic echoes and estimating their time-of-flights. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 1997, 44, 1253–1263. [Google Scholar] [CrossRef]
- Barshan, B.; Kuc, R. A bat-like sonar system for obstacle localization. IEEE Trans. Syst. Man, Cybern. 1992, 22, 636–646. [Google Scholar] [CrossRef]
- Proakis, J.G.; Manolakis, D.K. Digital Signal Processing: Principles, Algorithms, and Applications; Prentice Hall: Upper Saddle River, NJ, USA, 2006. [Google Scholar]
- Farrag, S.; Alexan, W.; Hussein, H.H. Triple-Layer Image Security Using a Zigzag Embedding Pattern; IEEE: Piscataway, NJ, USA, 2019. [Google Scholar]
- Andria, G.; Attivissimo, F.; Giaquinto, N. Digital signal processing techniques for accurate ultrasonic sensor measurement. Measurement 2001, 30, 105–114. [Google Scholar] [CrossRef]
- Angrisani, L.; Baccigalupi, A.; Moriello, R.S.L. A Measurement Method Based on Kalman Filtering for Ultrasonic Time-of-Flight Estimation. IEEE Trans. Instrum. Meas. 2006, 55, 442–448. [Google Scholar] [CrossRef]
- Barshan, B. Fast processing techniques for accurate ultrasonic range measurements. Meas. Sci. Technol. 2000, 11, 45–50. [Google Scholar] [CrossRef]
- Khyam, O.; Ge, S.S.; Li, X.; Pickering, M.R. Highly Accurate Time-of-Flight Measurement Technique Based on Phase-Correlation for Ultrasonic Ranging. IEEE Sensors J. 2017, 17, 434–443. [Google Scholar] [CrossRef]
- Esslinger, D.; Rapp, P.; Sawodny, O.; Tarin, C. High Precision Opto-Acoustic BPSK-CDMA Distance Measurement for Object Tracking. In Proceedings of the 2018 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Miyazaki, Japan, 7–10 October 2018; pp. 2898–2905. [Google Scholar]
- Bühling, B.; Küttenbaum, S.; Maack, S.; Strangfeld, C. Development of an Accurate and Robust Air-Coupled Ultrasonic Time-of-Flight Measurement Technique. Sensors 2022, 22, 2135. [Google Scholar] [CrossRef] [PubMed]
- Nalini, B.; Nandhini, V.; Kavitha, E.; Chandralekha, R. Implementation of Temperature Compensation Technique with Ultrasonic Ranging for Obstacle Identification. Int. J. Res. Dev. Eng. (IJRDE) 2016, 230–234. [Google Scholar]
- Feng, X.J.; Deng, B.Q. Design of Ultrasonic Reversing Distance Meter with Temperature Compensation; IEEE: Piscataway, NJ, USA, 2020. [Google Scholar]
- Leping, Z.; Bangshu, X.; Hui, Y. Real-Time Measurement for Tip Clearance of Twin-Rotor Helicopter under Complex Background and Illumination. J. Appl. Sci. 2024, 24, 314–322. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | SNR | MSE | NCC |
|---|---|---|---|
| Before denoising | 2.1602 | 0.011374 | 0.77842 |
| After denoising | 9.0296 | 0.002338 | 0.93607 |
| TOF Method | RMSE | MAE | S * |
|---|---|---|---|
| ATM (denoised) | 4.6279 | 3.6611 | 3.4562 |
| CCM (denoised) | 2.9036 | 2.3249 | 1.3076 |
| SWPDM (denoised) | 2.6736 | 2.2586 | 1.1585 |
| SWPDM (not denoised) | 3.4432 | 2.3493 | 2.4004 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, S.; Lu, Y.; Qiu, Z.; Hu, W.; Dong, Z.; Qiu, Z.; Qiu, Y. Distance Measurement of Contra-Rotating Rotor Blades with Ultrasonic Transducers. Micromachines 2024, 15, 676. https://doi.org/10.3390/mi15060676
Zhang S, Lu Y, Qiu Z, Hu W, Dong Z, Qiu Z, Qiu Y. Distance Measurement of Contra-Rotating Rotor Blades with Ultrasonic Transducers. Micromachines. 2024; 15(6):676. https://doi.org/10.3390/mi15060676
Chicago/Turabian StyleZhang, Shan, Yaohuan Lu, Zhen Qiu, Wenchuan Hu, Zewen Dong, Zurong Qiu, and Yongqiang Qiu. 2024. "Distance Measurement of Contra-Rotating Rotor Blades with Ultrasonic Transducers" Micromachines 15, no. 6: 676. https://doi.org/10.3390/mi15060676