
Design of Lidar Receiving Optical System with Large FoV and High Concentration of Light to Resist Background Light Interference

Abstract
:1. Introduction
2. Theoretical Analysis
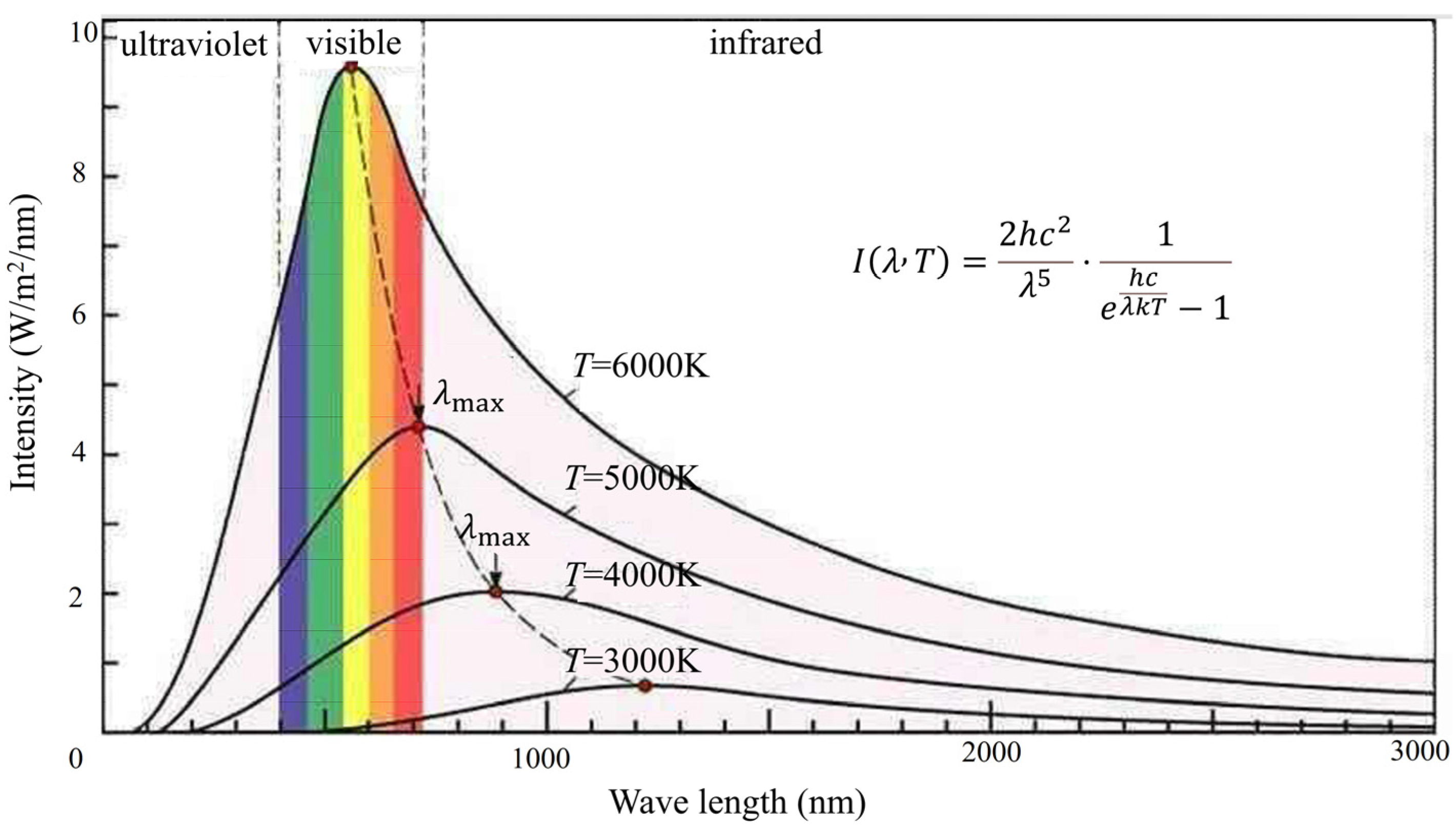
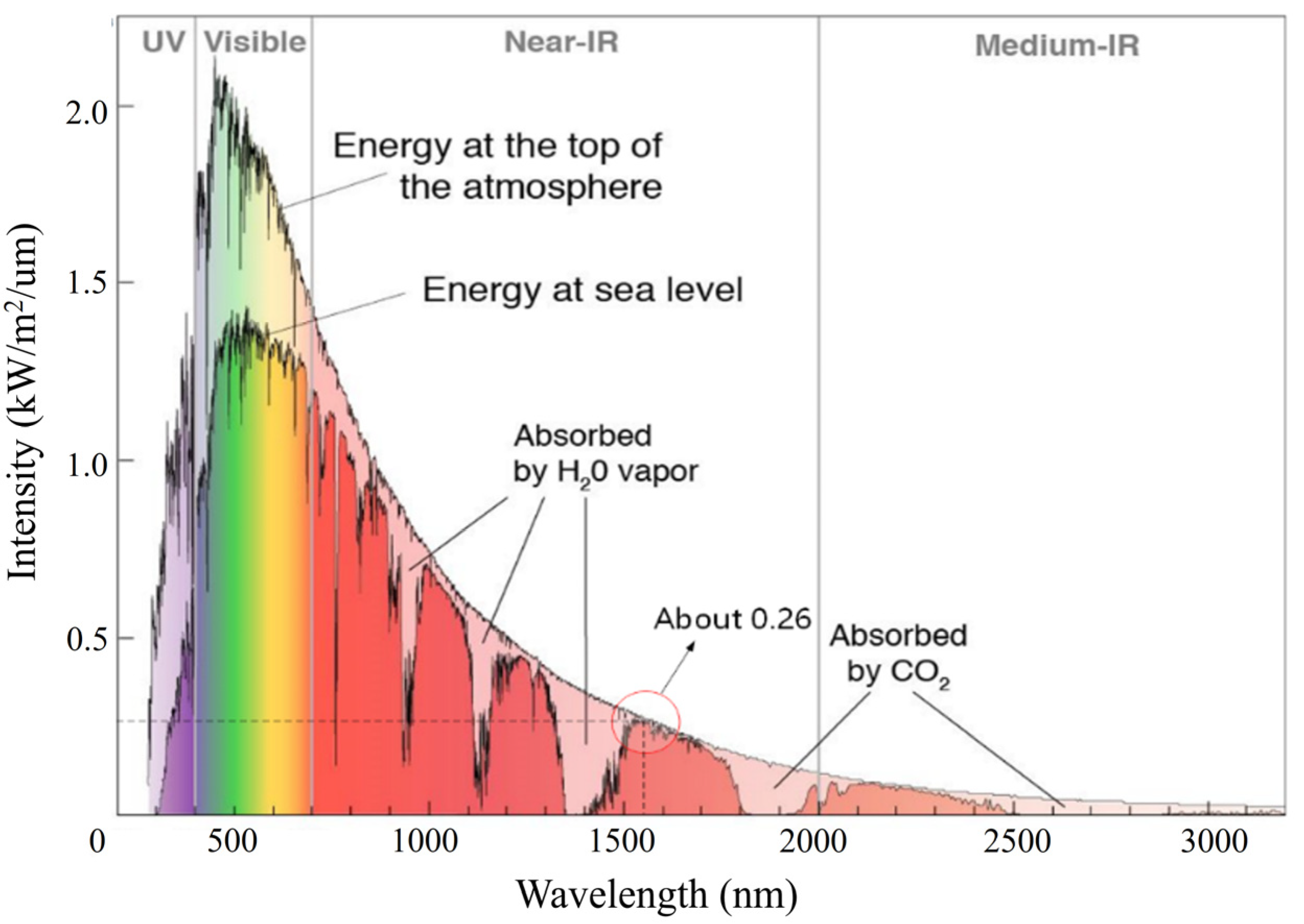
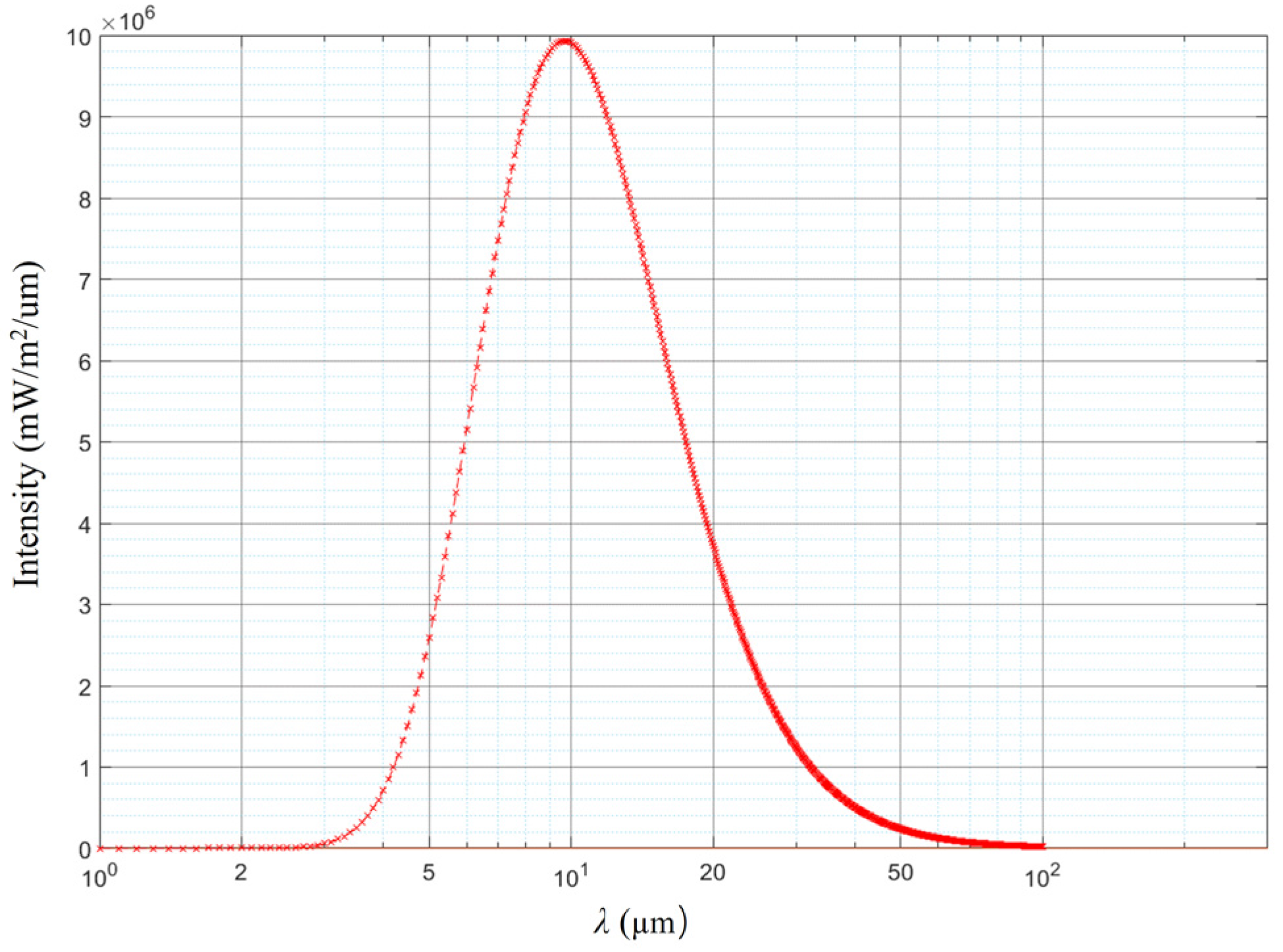
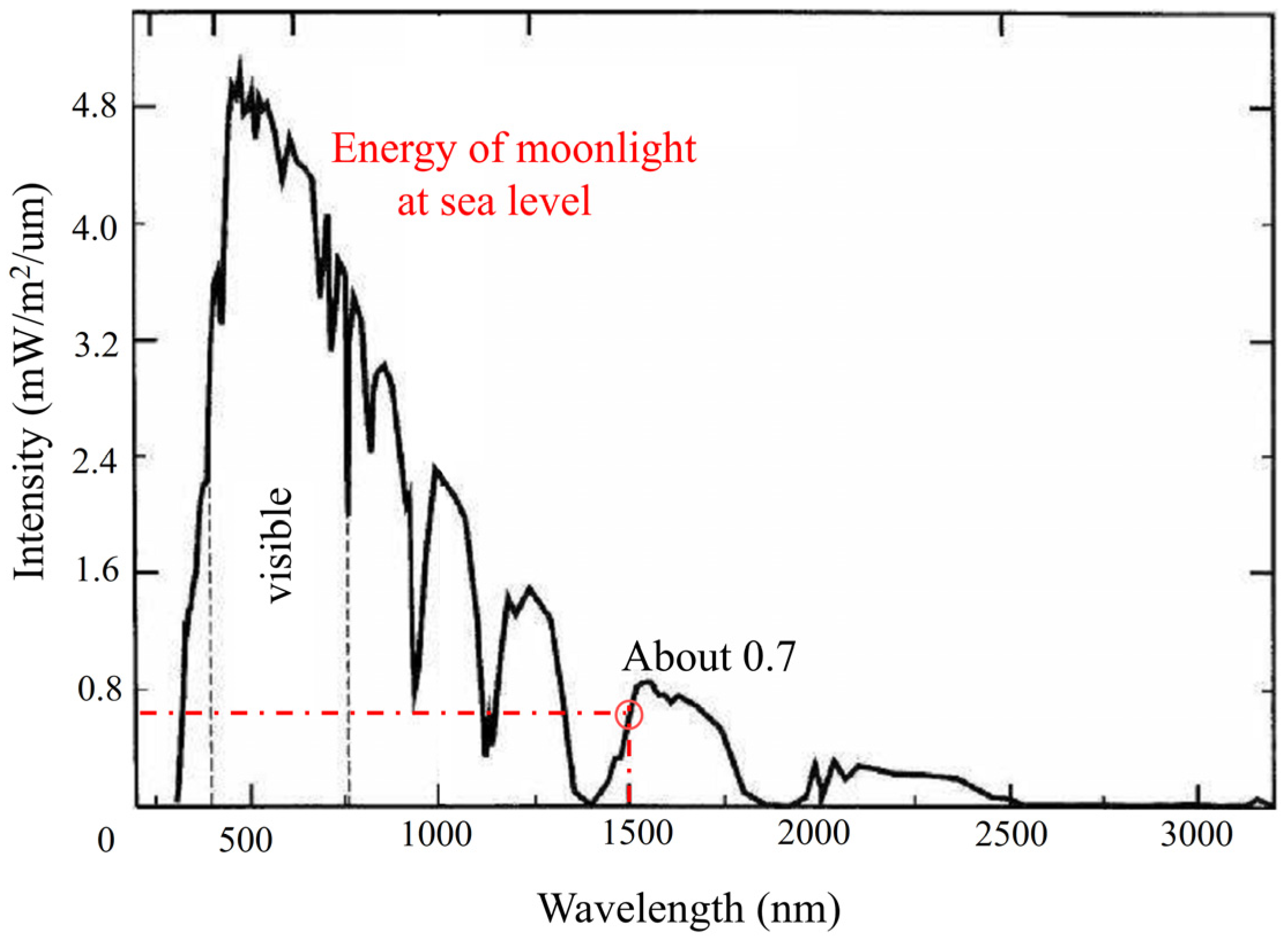
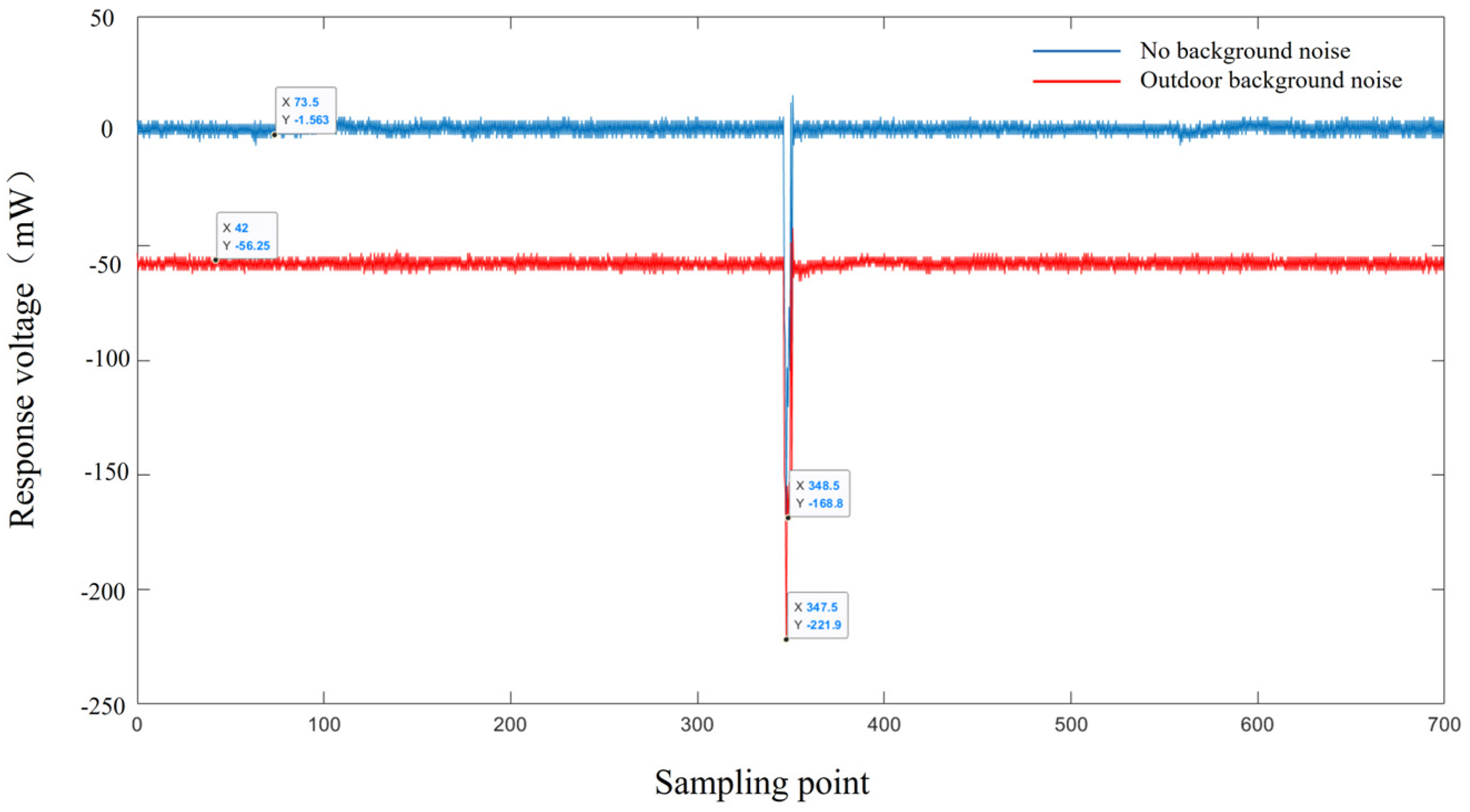
2.1. Effect of Background Light Radiation on Echo Signals
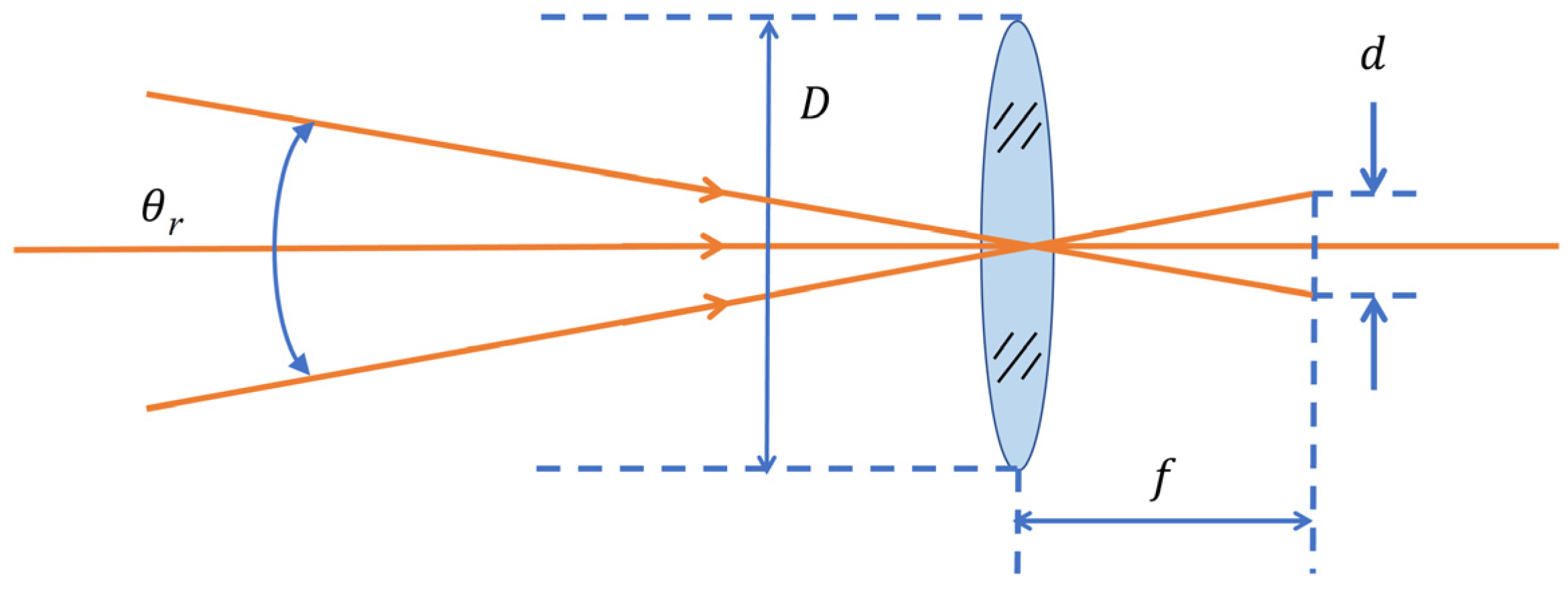
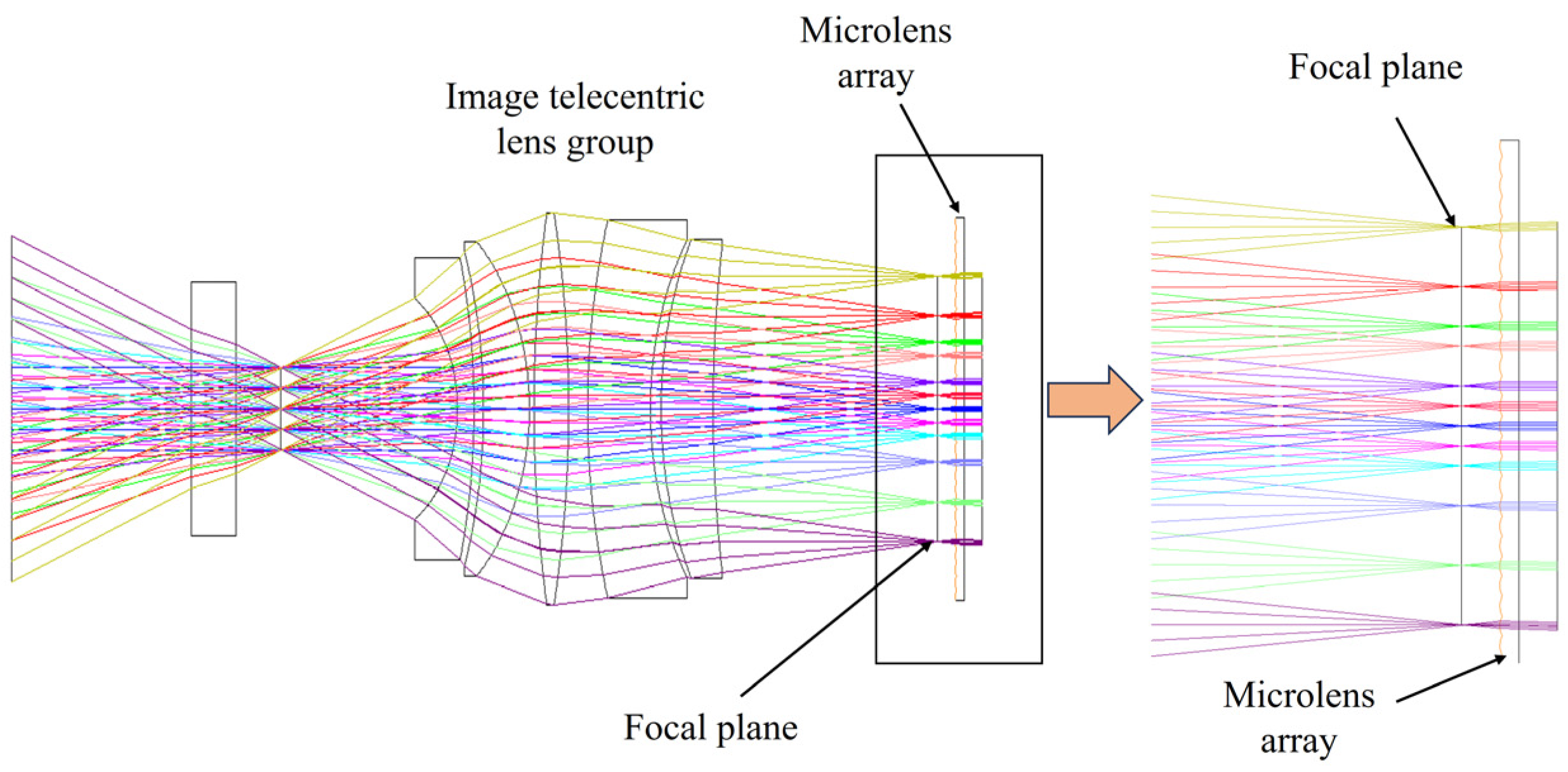
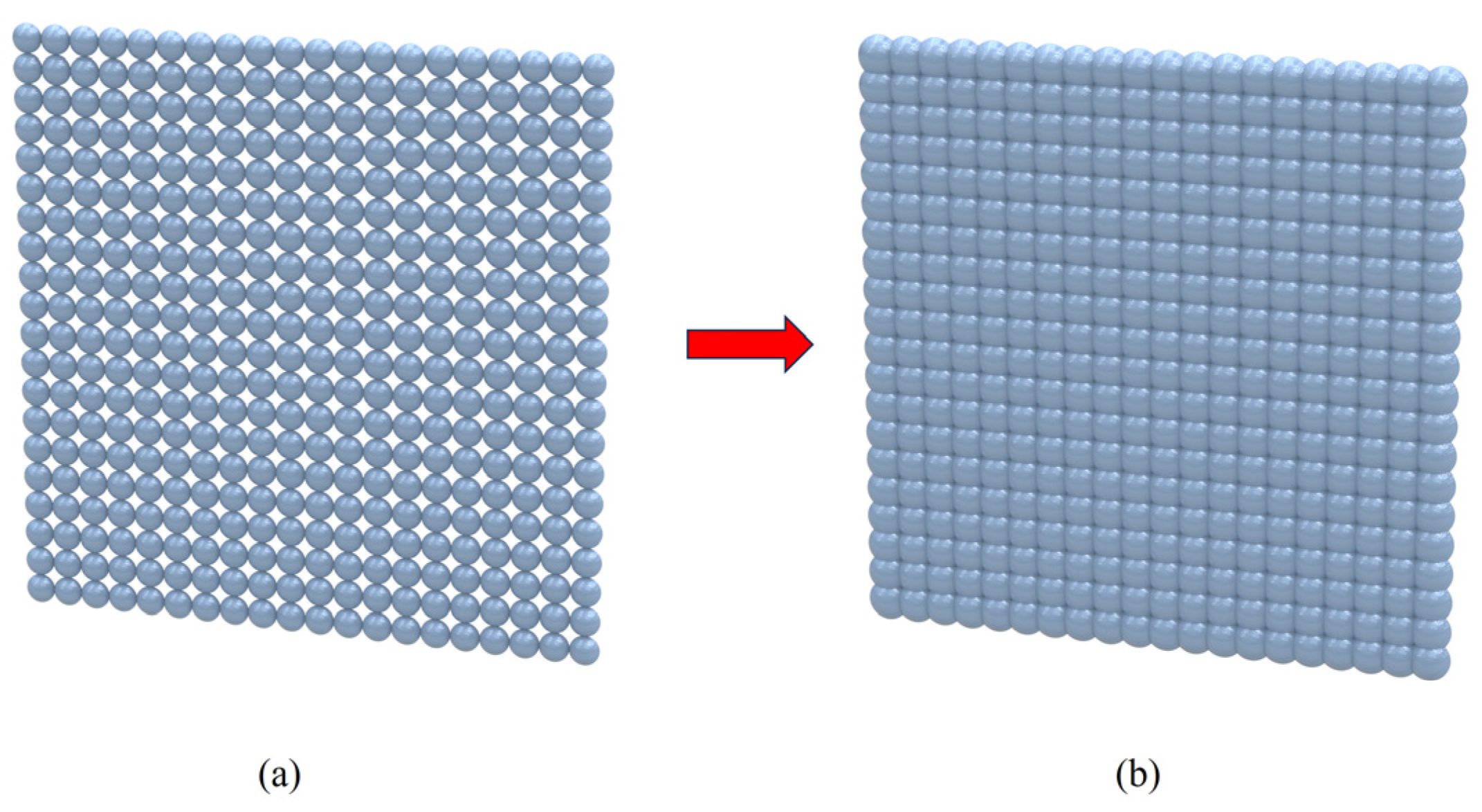
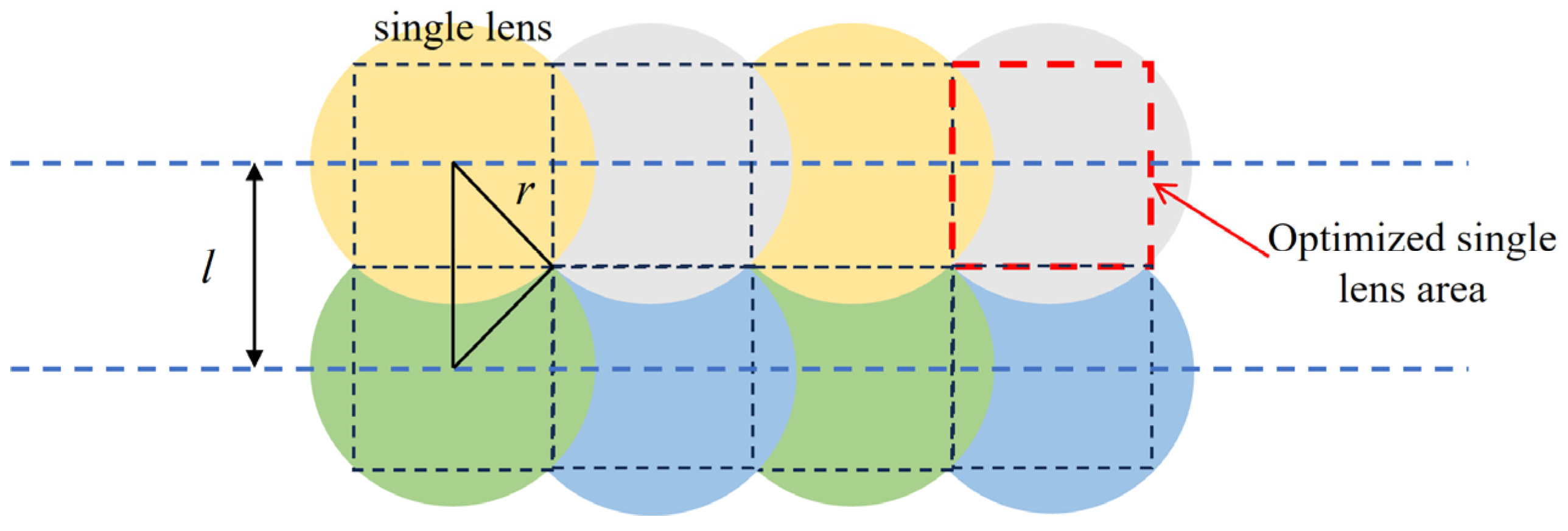
2.2. Design of Optical System for Receiving Echo Signals with Large FoV and High Concentration
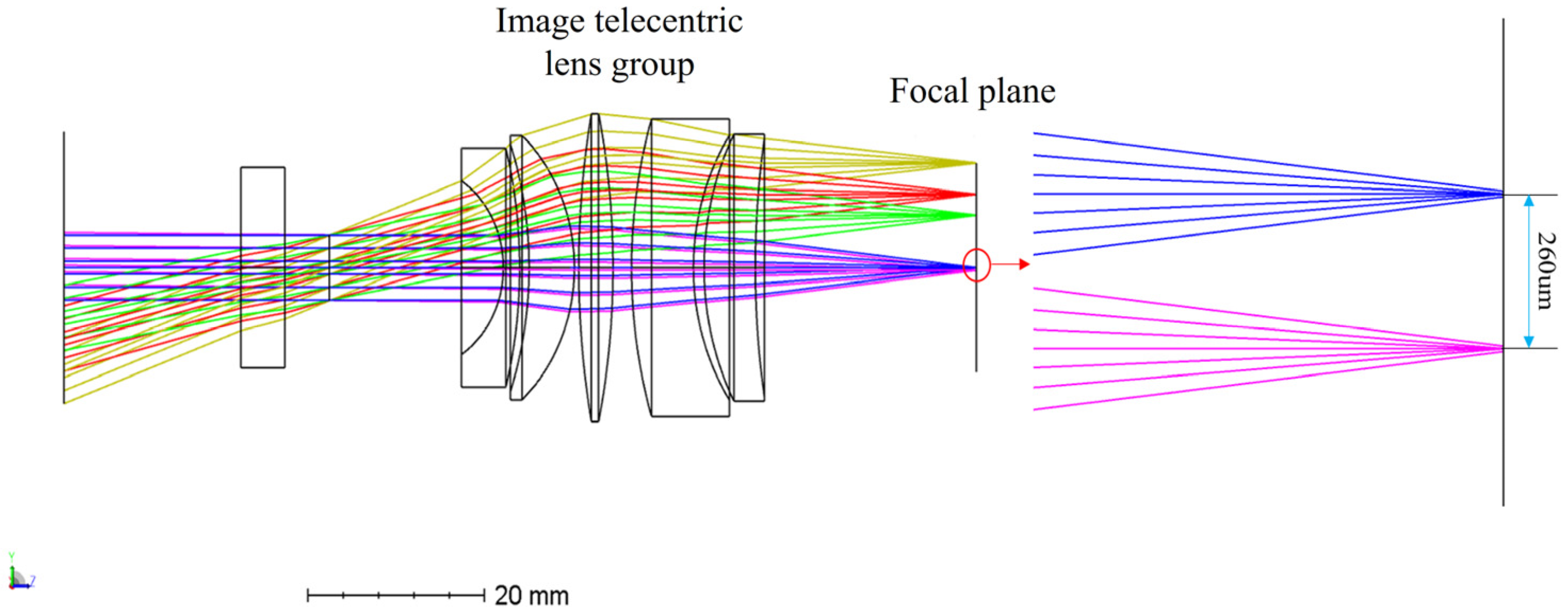
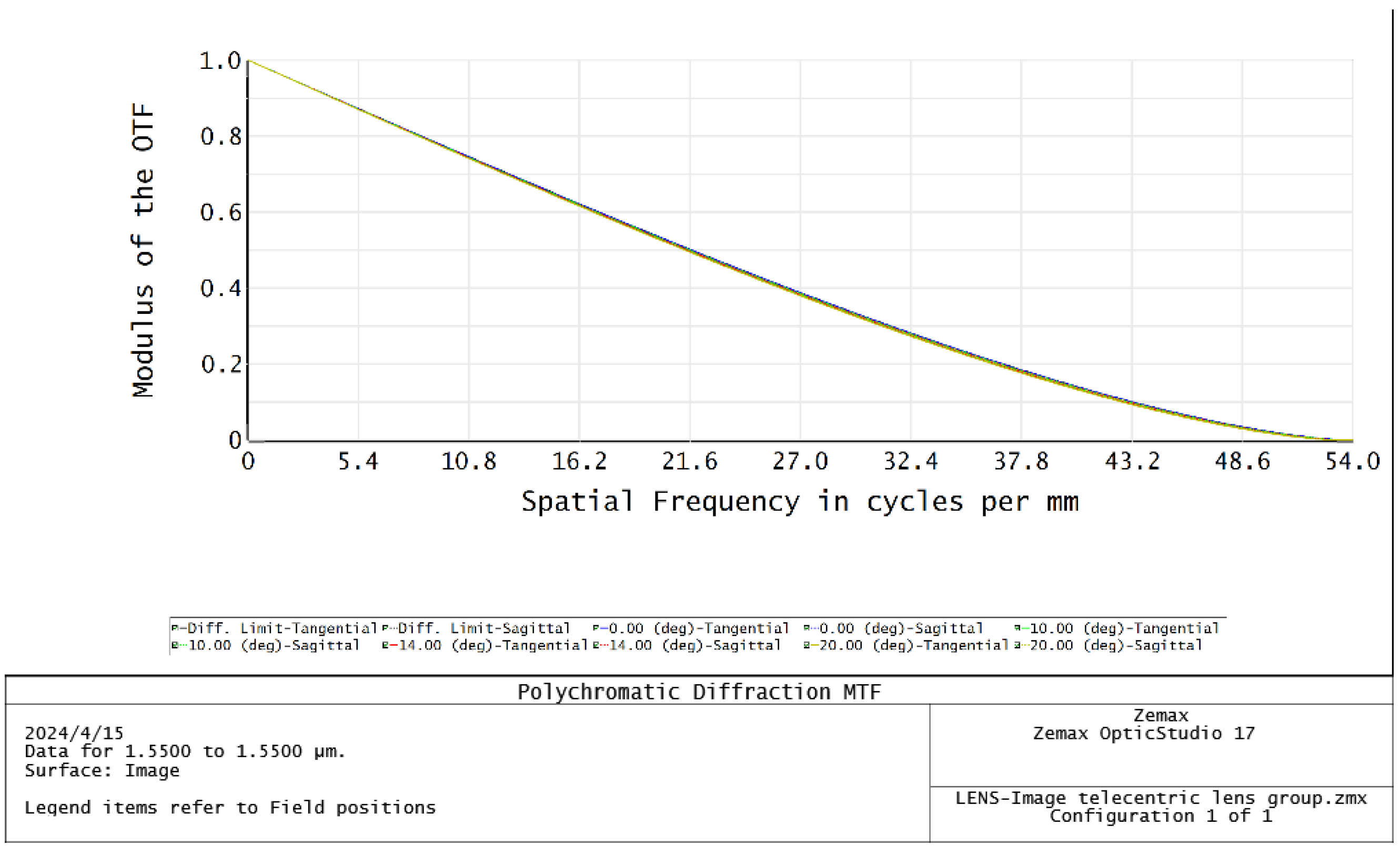
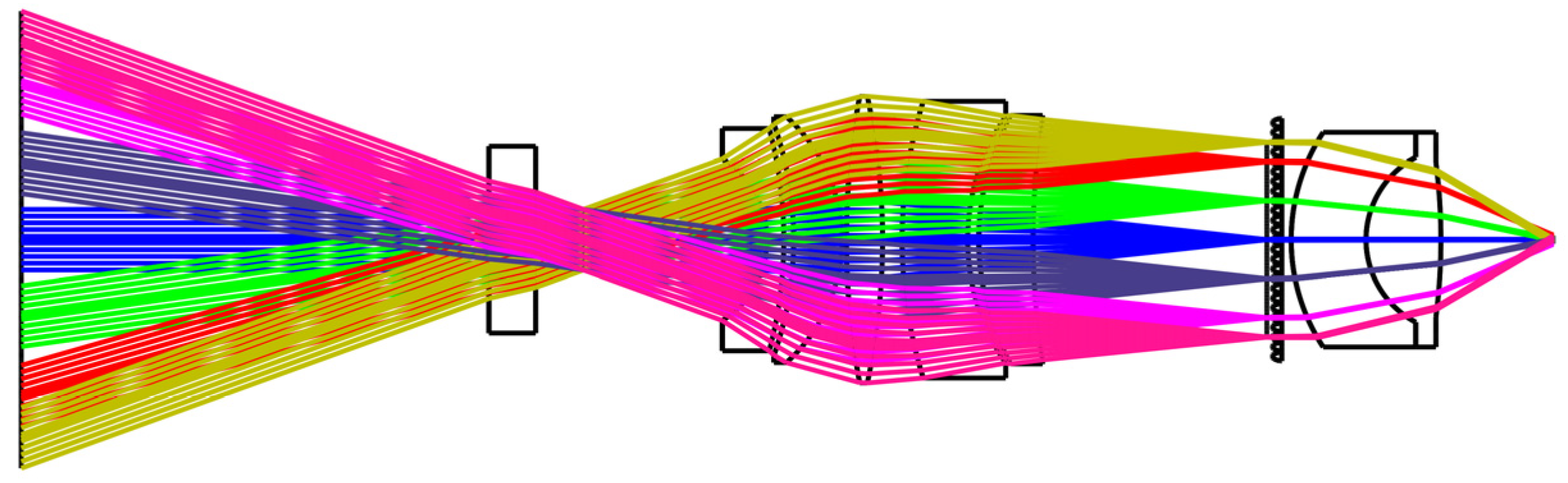
3. Optical Design and Parametric Analysis
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kirchengast, M.; Watzenig, D. A Depth-Buffer-Based Lidar Model With Surface Normal Estimation. IEEE Trans. Intell. Transp. Syst. 2024. [Google Scholar] [CrossRef]
- Xia, X.; Bhatt, N.P.; Khajepour, A.; Hashemi, E. Integrated inertial-LiDAR-based map matching localization for varying environments. IEEE TIV 2023, 8, 4307–4318. [Google Scholar] [CrossRef]
- Neuville, R.; Bates, J.S.; Jonard, F. Estimating forest structure from UAV-mounted LiDAR point cloud using machine learning. Remote Sens. 2021, 13, 352. [Google Scholar] [CrossRef]
- Li, B.; Lin, Q.; Li, M. Frequency–angular resolving LiDAR using chip-scale acousto-optic beam steering. Nature 2023, 620, 316–322. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; Wu, K.; Cao, X.; Zhang, G.; Li, T.; Deng, Z.; Chang, M.; Wang, Y.; Li, X.; Chen, J. Monolithic coherent LABS lidar based on an integrated transceiver array. Opt. Lett. 2022, 47, 2907–2910. [Google Scholar] [CrossRef] [PubMed]
- Li, Q.; Zhang, Y.; Fan, R.; Wang, Y.; Wang, C. MEMS mirror based omnidirectional scanning for LiDAR optical systems. Opt. Lasers Eng. 2022, 158, 107178. [Google Scholar] [CrossRef]
- Seo, Y.-H.; Hwang, K.; Kim, H.; Jeong, K.-H. Scanning MEMS mirror for high definition and high frame rate Lissajous patterns. Micromachines 2019, 10, 67. [Google Scholar] [CrossRef] [PubMed]
- Pang, Y.; Zhang, K.; Bai, Z.; Sun, Y.; Yao, M. Design study of a large-angle optical scanning system for MEMS LIDAR. Appl. Sci. 2022, 12, 1283. [Google Scholar] [CrossRef]
- Li, Q.; Wang, C.; Wei, X.; Ye, B.; Wang, S.; Chen, F.; Gong, H. Design of non-imaging receiving system for large field of view lidar. Infrared Phys. Technol. 2023, 133, 104802. [Google Scholar] [CrossRef]
- Ma, Y.-J.; Zhang, Y.-G.; Gu, Y.; Chen, X.-Y.; Zhou, L.; Xi, S.-P.; Li, H.-S. Low operating voltage and small gain slope of InGaAs APDs with p-type multiplication layer. IEEE Photonics Technol. Lett. 2015, 27, 661–664. [Google Scholar] [CrossRef]
- Hobbs, M.J.; Willmott, J.R. InGaAs avalanche photodiode thermometry. Mea. Sci. Technol. 2019, 31, 014005. [Google Scholar] [CrossRef]
- Wang, X.; Zhong, X.; Zhu, R.; Gao, F.; Li, Z. Extremely wide-angle lens with transmissive and catadioptric integration. Appl. Opt. 2019, 58, 4381–4389. [Google Scholar] [CrossRef] [PubMed]
- Meadway, A.; Sincich, L.C. Light propagation and capture in cone photoreceptors. Biomed. Opt. Express 2018, 9, 5543–5565. [Google Scholar] [CrossRef] [PubMed]
- Ramsay, E.; Serrels, K.A.; Dalgarno, P.A.; Gerardot, B.; O’Connor, J.; Hadfield, R.H.; Warburton, R.; Reid, D. Solid immersion lens applications for nanophotonic devices. J. Nanophotonics 2008, 2, 021854. [Google Scholar] [CrossRef]
- Lee, X.; Wang, X.; Cui, T.; Wang, C.; Li, Y.; Li, H.; Wang, Q. Increasing the effective aperture of a detector and enlarging the receiving field of view in a 3D imaging lidar system through hexagonal prism beam splitting. Opt. Express 2016, 24, 15222–15231. [Google Scholar] [CrossRef] [PubMed]
- Xu, N.; Ji, J.; Sun, W.; Huang, W.; Li, J.; Jin, Z. Numerical simulation and experimental validation of a high concentration photovoltaic/thermal module based on point-focus Fresnel lens. Appl. Energy 2016, 168, 269–281. [Google Scholar] [CrossRef]
- Karp, J.H.; Tremblay, E.J.; Ford, J.E. Planar micro-optic solar concentrator. Opt. Express 2010, 18, 1122–1133. [Google Scholar] [CrossRef] [PubMed]
- Ma, M.; Zhao, S.; Si, W.; Li, H.; Li, Y.; Deng, H.; Zhong, X. Design and optical characterization of compound eye type solar concentrator. Results Opt. 2022, 6, 100202. [Google Scholar] [CrossRef]
- Dodd, S.R.; Lancaster, G.A.; Craig, J.V.; Smyth, R.L.; Williamson, P.R. In a systematic review, infrared ear thermometry for fever diagnosis in children finds poor sensitivity. J. Clin. Epidemiol. 2006, 59, 354–357. [Google Scholar] [CrossRef] [PubMed]
- Hoffmann, G. Principles and working mechanisms of water-filtered infrared-A (wIRA) in relation to wound healing. GMS Krankenhaushyg. Interdiszip. 2007, 2, 2. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Surface: Type | Radius (mm) | Thickness (mm) | Glass | Semi-Diameter (mm) | Mechanical Semi-Diameter (mm) |
|---|---|---|---|---|---|
| 1: Standard surface | −10.277 | 1.845 | H-QK3L | 7.457 | 9.675 |
| 2: Standard surface | −46.106 | 1.058 | 9.675 | 9.675 | |
| 3: Standard surface | −37.152 | 5.125 | N-SF66 | 10.179 | 11.394 |
| 4: Standard surface | −17.625 | 0.500 | 11.394 | 11.394 | |
| 5: Standard surface | 83.327 | 3.869 | N-ASF46A | 12.939 | 13.050 |
| 6: Standard surface | −73.388 | 2.099 | 13.050 | 13.050 | |
| 7: Standard surface | 50.000 | 7.000 | N-SF6HT | 12.884 | 12.884 |
| 8: Standard surface | 23.491 | 1.198 | 11.756 | 12.884 | |
| 9: Standard surface | 27.945 | 5.798 | H-ZF7LA | 11.911 | 11.911 |
| 10: Standard surface | 84.783 | 11.562 | 11.911 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Q.; Wang, S.; Wu, J.; Chen, F.; Gao, H.; Gong, H. Design of Lidar Receiving Optical System with Large FoV and High Concentration of Light to Resist Background Light Interference. Micromachines 2024, 15, 712. https://doi.org/10.3390/mi15060712
Li Q, Wang S, Wu J, Chen F, Gao H, Gong H. Design of Lidar Receiving Optical System with Large FoV and High Concentration of Light to Resist Background Light Interference. Micromachines. 2024; 15(6):712. https://doi.org/10.3390/mi15060712
Chicago/Turabian StyleLi, Qingyan, Shuo Wang, Jiajie Wu, Feiyue Chen, Han Gao, and Hai Gong. 2024. "Design of Lidar Receiving Optical System with Large FoV and High Concentration of Light to Resist Background Light Interference" Micromachines 15, no. 6: 712. https://doi.org/10.3390/mi15060712