
Microgripper Robot with End Electropermanent Magnet Collaborative Actuation



 and
and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
2.1. Design of MGR
2.2. Preparation of MGR
2.3. Modeling of MGR’s Bending Characteristics
2.3.1. Magnetic Field Response of Permanent Magnetic Balls
2.3.2. Bending Characteristics of MGR
2.4. Modeling of MG’s Motion Behavior
3. Results
3.1. Coil Safety Temperature Evaluation
3.2. Assessment of the Degree of Deformation of Magnetic Microgripper
3.3. Assessment of Graspable Objects
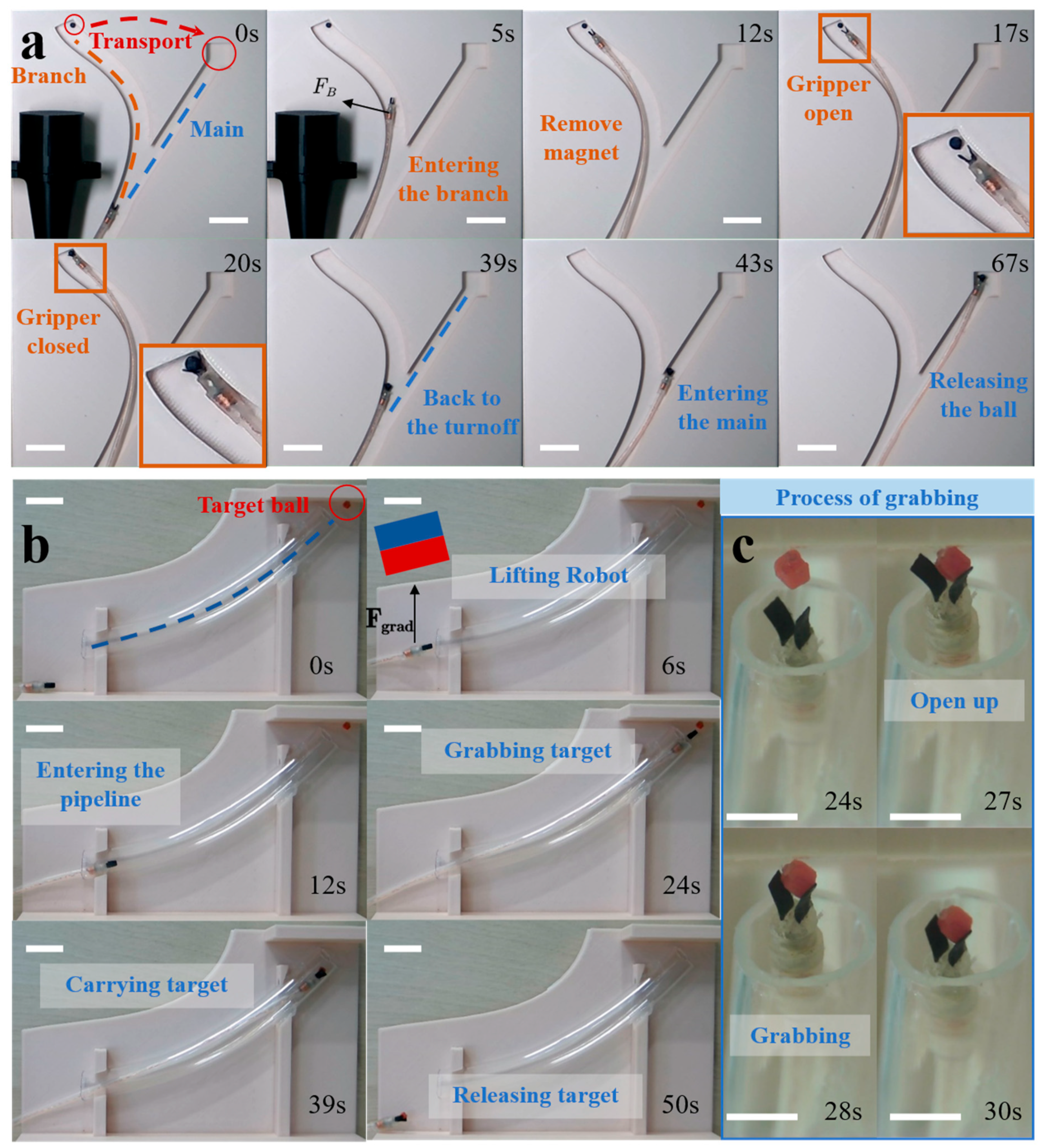
3.4. The Steering and Navigation Capabilities of MGR
3.5. Achieving Circuit Connection in Confined Environments
3.6. Planar and Antigravity Grasping
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zheng, Z.; Wang, H.; Dong, L.; Shi, Q.; Li, J.; Sun, T.; Huang, Q.; Fukuda, T. Ionic Shape-Morphing Microrobotic End-Effectors for Environmentally Adaptive Targeting, Releasing, and Sampling. Nat. Commun. 2021, 12, 411. [Google Scholar] [CrossRef] [PubMed]
- Pouponneau, P.; Leroux, J.-C.; Soulez, G.; Gaboury, L.; Martel, S. Co-Encapsulation of Magnetic Nanoparticles and Doxorubicin into Biodegradable Microcarriers for Deep Tissue Targeting by Vascular MRI Navigation. Biomaterials 2011, 32, 3481–3486. [Google Scholar] [CrossRef] [PubMed]
- Esteban-Fernández de Ávila, B.; Lopez-Ramirez, M.A.; Mundaca-Uribe, R.; Wei, X.; Ramírez-Herrera, D.E.; Karshalev, E.; Nguyen, B.; Fang, R.H.; Zhang, L.; Wang, J. Multicompartment Tubular Micromotors Toward Enhanced Localized Active Delivery. Adv. Mater. 2020, 32, 2000091. [Google Scholar] [CrossRef]
- Arqué, X.; Romero-Rivera, A.; Feixas, F.; Patiño, T.; Osuna, S.; Sánchez, S. Intrinsic Enzymatic Properties Modulate the Self-Propulsion of Micromotors. Nat. Commun. 2019, 10, 2826. [Google Scholar] [CrossRef] [PubMed]
- Schuerle, S.; Soleimany, A.P.; Yeh, T.; Anand, G.M.; Häberli, M.; Fleming, H.E.; Mirkhani, N.; Qiu, F.; Hauert, S.; Wang, X.; et al. Synthetic and Living Micropropellers for Convection-Enhanced Nanoparticle Transport. Sci. Adv. 2019, 5, eaav4803. [Google Scholar] [CrossRef] [PubMed]
- Zhang, F.; Zhuang, J.; Li, Z.; Gong, H.; de Ávila, B.E.-F.; Duan, Y.; Zhang, Q.; Zhou, J.; Yin, L.; Karshalev, E.; et al. Nanoparticle-Modified Microrobots for in Vivo Antibiotic Delivery to Treat Acute Bacterial Pneumonia. Nat. Mater. 2022, 21, 1324–1332. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Shen, J.; Handschuh-Wang, S.; Qiu, M.; Du, S.; Wang, B. Microrobots for Targeted Delivery and Therapy in Digestive System. ACS Nano 2023, 17, 27–50. [Google Scholar] [CrossRef]
- Arqué, X.; Torres, M.D.T.; Patiño, T.; Boaro, A.; Sánchez, S.; de la Fuente-Nunez, C. Autonomous Treatment of Bacterial Infections in Vivo Using Antimicrobial Micro- and Nanomotors. ACS Nano 2022, 16, 7547–7558. [Google Scholar] [CrossRef]
- Ye, M.; Zhou, Y.; Zhao, H.; Wang, X. Magnetic Microrobots with Folate Targeting for Drug Delivery. Cyborg Bionic Syst. 2023, 4, 0019. [Google Scholar] [CrossRef]
- Fu, M.; Shen, Y.; Zhou, H.; Liu, X.; Chen, W.; Ma, X. Gallium-Based Liquid Metal Micro/Nanoparticles for Photothermal Cancer Therapy. J. Mater. Sci. Technol. 2023, 142, 22–33. [Google Scholar] [CrossRef]
- Gordón, J.; Arruza, L.; Ibáñez, M.D.; Moreno-Guzmán, M.; López, M.Á.; Escarpa, A. On the Move-Sensitive Fluorescent Aptassay on Board Catalytic Micromotors for the Determination of Interleukin-6 in Ultra-Low Serum Volumes for Neonatal Sepsis Diagnostics. ACS Sens. 2022, 7, 3144–3152. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.; Pan, R.; Wang, Y.; Guo, P.; Liu, X.; Ji, F.; Hu, J.; Yan, X.; Wang, G.P.; Zhang, L.; et al. Carbon Helical Nanorobots Capable of Cell Membrane Penetration for Single Cell Targeted SERS Bio-Sensing and Photothermal Cancer Therapy. Adv. Funct. Mater. 2022, 32, 2200600. [Google Scholar] [CrossRef]
- Zhou, H.; Zhang, S.; Liu, Z.; Chi, B.; Li, J.; Wang, Y. Untethered Micro grippers for Precision Medicine. Small 2023, 20, 2305805. [Google Scholar] [CrossRef] [PubMed]
- Llewellyn-Evans, H.; Griffiths, C.A.; Fahmy, A. Micro gripper Design and Evaluation for Automated Μ-Wire Assembly: A Survey. Microsyst. Technol. 2020, 26, 1745–1768. [Google Scholar] [CrossRef]
- Verotti, M.; Dochshanov, A.; Belfiore, N.P. A Comprehensive Survey on Micro grippers Design: Mechanical Structure. J. Mech. Des. 2017, 139, 060801. [Google Scholar] [CrossRef]
- Kumar Das, T.; Shirinzadeh, B.; Al-Jodah, A.; Ghafarian, M.; Pinskier, J. A Novel Compliant Piezoelectric Actuated Symmetric Micro gripper for the Parasitic Motion Compensation. Mech. Mach. Theory 2021, 155, 104069. [Google Scholar] [CrossRef]
- Akbari, M.; Barazandeh, F.; Barati, H. A Novel Approach to Design and Fabricate an Electrothermal Micro gripper for Cell Manipulation. Sens. Actuators A Phys. 2022, 346, 113877. [Google Scholar] [CrossRef]
- Bazaz, S.A.; Khan, F.; Shakoor, R.I. Design, Simulation and Testing of Electrostatic SOI MUMPs Based Micro gripper Integrated with Capacitive Contact Sensor. Sens. Actuators A Phys. 2011, 167, 44–53. [Google Scholar] [CrossRef]
- Kim, D.-H.; Lee, M.G.; Kim, B.; Sun, Y. A Superelastic Alloy Micro gripper with Embedded Electromagnetic Actuators and Piezoelectric Force Sensors: A Numerical and Experimental Study. Smart Mater. Struct. 2005, 14, 1265–1272. [Google Scholar] [CrossRef]
- Roch, I.; Bidaud, P.; Collard, D.; Buchaillot, L. Fabrication and Characterization of an SU-8 Gripper Actuated by a Shape Memory Alloy Thin Film. J. Micromech. Microeng. 2003, 13, 330–336. [Google Scholar] [CrossRef]
- Dunn, C.R.; Lee, B.P.; Rajachar, R.M. Thermomagnetic-Responsive Self-Folding Micro grippers for Improving Minimally Invasive Surgical Techniques and Biopsies. Molecules 2022, 27, 5196. [Google Scholar] [CrossRef] [PubMed]
- Kobayashi, K.; Yoon, C.; Oh, S.H.; Pagaduan, J.V.; Gracias, D.H. Biodegradable Thermomagnetically Responsive Soft Untethered Grippers. ACS Appl. Mater. Interfaces 2019, 11, 151–159. [Google Scholar] [CrossRef] [PubMed]
- Xu, T.; Zhang, J.; Salehizadeh, M.; Onaizah, O.; Diller, E. Millimeter-Scale Flexible Robots with Programmable Three-Dimensional Magnetization and Motions. Sci. Robot. 2019, 4, eaav4494. [Google Scholar] [CrossRef] [PubMed]
- Bassik, N.; Brafman, A.; Zarafshar, A.M.; Jamal, M.; Luvsanjav, D.; Selaru, F.M.; Gracias, D.H. Enzymatically Triggered Actuation of Miniaturized Tools. J. Am. Chem. Soc. 2010, 132, 16314–16317. [Google Scholar] [CrossRef] [PubMed]
- Martella, D.; Nocentini, S.; Nuzhdin, D.; Parmeggiani, C.; Wiersma, D.S. Photonic Microhand with Autonomous Action. Adv. Mater. 2017, 29, 1704047. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Shang, Z.; Wang, Y.; Liu, J.; Xie, Y.; Li, J.; Liu, Y.; Gan, W. Programmable, Changeable, Origami Cellulose Films for Magnetically Controllable Soft Robots. ACS Appl. Mater. Interfaces 2023, 15, 28442–28452. [Google Scholar] [CrossRef]
- Chen, G.; Ma, B.; Zhang, J.; Chen, Y.; Liu, H. Reprogrammable Magnetic Soft Robots Based on Low Melting Alloys. Adv. Intell. Syst. 2023, 5, 2300173. [Google Scholar] [CrossRef]
- Li, Z.; Lai, Y.P.; Diller, E. 3D Printing of Multilayer Magnetic Miniature Soft Robots with Programmable Magnetization. Adv. Intell. Syst. 2023, 6, 2300052. [Google Scholar] [CrossRef]
- Zhang, Y.; Pan, C.; Liu, P.; Peng, L.; Liu, Z.; Li, Y.; Wang, Q.; Wu, T.; Li, Z.; Majidi, C.; et al. Coaxially Printed Magnetic Mechanical Electrical Hybrid Structures with Actuation and Sensing Functionalities. Nat. Commun. 2023, 14, 4428. [Google Scholar] [CrossRef]
- Sikorski, J.; Mohanty, S.; Misra, S. MILiMAC: Flexible Catheter with Miniaturized Electromagnets as a Small-Footprint System for Microrobotic Tasks. IEEE Robot. Autom. Lett. 2020, 5, 5260–5267. [Google Scholar] [CrossRef]
- Son, D.; Dong, X.; Sitti, M. A Simultaneous Calibration Method for Magnetic Robot Localization and Actuation Systems. IEEE Trans. Robot. 2019, 35, 343–352. [Google Scholar] [CrossRef]
- Huang, C.; Xu, T.; Liu, J.; Manamanchaiyaporn, L.; Wu, X. Visual Servoing of Miniature Magnetic Film Swimming Robots for 3-D Arbitrary Path Following. IEEE Robot. Autom. Lett. 2019, 4, 4185–4191. [Google Scholar] [CrossRef]
- Leclerc, J.; Zhao, H.; Becker, A.T. 3D Control of Rotating Millimeter-Scale Swimmers Through Obstacles. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 8890–8896. [Google Scholar]
- Chautems, C.; Tonazzini, A.; Boehler, Q.; Jeong, S.H.; Floreano, D.; Nelson, B.J. Magnetic Continuum Device with Variable Stiffness for Minimally Invasive Surgery. Adv. Intell. Syst. 2020, 2, 1900086. [Google Scholar] [CrossRef]
- Sikorski, J.; Heunis, C.M.; Franco, F.; Misra, S. The ARMM System: An Optimized Mobile Electromagnetic Coil for Non-Linear Actuation of Flexible Surgical Instruments. IEEE Trans. Magn. 2019, 55, 5600109. [Google Scholar] [CrossRef]
- Ceyssens, F.; Sadeghpour, S.; Fujita, H.; Puers, R. Actuators: Accomplishments, Opportunities and Challenges. Sens. Actuators A Phys. 2019, 295, 604–611. [Google Scholar] [CrossRef]
- Lv, X.; Wei, W.; Mao, X.; Chen, Y.; Yang, J.; Yang, F. A Novel MEMS Electromagnetic Actuator with Large Displacement. Sens. Actuators A Phys. 2015, 221, 22–28. [Google Scholar] [CrossRef]
- Khan, F.U.; Ahmad, I. Review of Energy Harvesters Utilizing Bridge Vibrations. Shock Vib. 2016, 2016, 1340402. [Google Scholar] [CrossRef]
- Janak, L.; Hadas, Z.; Smilek, J. Reliability Assessment of Electromechanical Energy Harvesting Systems Establishment of Devices’ Key Characteristics for Application in Safety-Critical Systems. In Proceedings of the 2016 17th International Conference on Mechatronics—Mechatronika (ME), Prague, Czech Republic, 7–9 December 2016; pp. 1–4. [Google Scholar]
- Shutov, M.V.; Sandoz, E.E.; Howard, D.L.; Hsia, T.C.; Smith, R.L.; Collins, S.D. A Microfabricated Electromagnetic Linear Synchronous Motor. Sens. Actuators A Phys. 2005, 121, 566–575. [Google Scholar] [CrossRef]
- Roy, S.; Mallick, D.; Paul, K. MEMS-Based Vibrational Energy Harvesting and Conversion Employing Micro-/Nano-Magnetics. IEEE Trans. Magn. 2019, 55, 4700315. [Google Scholar] [CrossRef]
- Wang, Y.; Zhi, C.; Tang, B.; Yang, K.; Xie, J.; Xu, W.; Li, H.; Wang, X. A Micro Electromagnetic Actuator with High Force Density. Sens. Actuators A Phys. 2021, 331, 112771. [Google Scholar] [CrossRef]
- Do, T.N.; Phan, H.; Nguyen, T.; Visell, Y. Miniature Soft Electromagnetic Actuators for Robotic Applications. Adv. Funct. Mater. 2018, 28, 1800244. [Google Scholar] [CrossRef]
- Fan, J.; Ren, S.; Han, B.; He, R.; Zhang, Z.; Han, Q.; Yang, X.; Wang, H.; Ma, Z. Magnetic Fiber Robots with Multiscale Functional Structures at the Distal End. Adv. Funct. Mater. 2024, 34, 2309424. [Google Scholar] [CrossRef]
- Yang, Z.; Zhang, L. Magnetic Actuation Systems for Miniature Robots: A Review. Adv. Intell. Syst. 2020, 2, 2000082. [Google Scholar] [CrossRef]
- Kim, Y.; Genevriere, E.; Harker, P.; Choe, J.; Balicki, M.; Regenhardt, R.W.; Vranic, J.E.; Dmytriw, A.A.; Patel, A.B.; Zhao, X. Telerobotic Neurovascular Interventions with Magnetic Manipulation. Sci. Robot. 2022, 7, eabg9907. [Google Scholar] [CrossRef] [PubMed]
- Hu, W.; Lum, G.Z.; Mastrangeli, M.; Sitti, M. Small-Scale Soft-Bodied Robot with Multimodal Locomotion. Nature 2018, 554, 81–85. [Google Scholar] [CrossRef]
- Hetts, S.W.; Saeed, M.; Martin, A.J.; Evans, L.; Bernhardt, A.F.; Malba, V.; Settecase, F.; Do, L.; Yee, E.J.; Losey, A.; et al. Endovascular Catheter for Magnetic Navigation under MR Imaging Guidance: Evaluation of Safety In Vivo at 1.5T. AJNR Am. J. Neuroradiol. 2013, 34, 2083–2091. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.; Tong, D.; Chen, Y.; Chen, Q.; Wu, Z.; Xu, X.; Fan, X.; Xie, H.; Yang, Z. Microgripper Robot with End Electropermanent Magnet Collaborative Actuation. Micromachines 2024, 15, 798. https://doi.org/10.3390/mi15060798
Zhao Y, Tong D, Chen Y, Chen Q, Wu Z, Xu X, Fan X, Xie H, Yang Z. Microgripper Robot with End Electropermanent Magnet Collaborative Actuation. Micromachines. 2024; 15(6):798. https://doi.org/10.3390/mi15060798
Chicago/Turabian StyleZhao, Yiqun, Dingwen Tong, Yutan Chen, Qinkai Chen, Zhengnan Wu, Xinmiao Xu, Xinjian Fan, Hui Xie, and Zhan Yang. 2024. "Microgripper Robot with End Electropermanent Magnet Collaborative Actuation" Micromachines 15, no. 6: 798. https://doi.org/10.3390/mi15060798
APA StyleZhao, Y., Tong, D., Chen, Y., Chen, Q., Wu, Z., Xu, X., Fan, X., Xie, H., & Yang, Z. (2024). Microgripper Robot with End Electropermanent Magnet Collaborative Actuation. Micromachines, 15(6), 798. https://doi.org/10.3390/mi15060798