
An FEM Study on Minimizing Electrostatic Cross-Talk in a Comb Drive Micro Mirror Array


Abstract
1. Introduction
2. Materials and Methods
3. Results and Discussion
3.1. Cross-Talk of the Initial Actuator Design
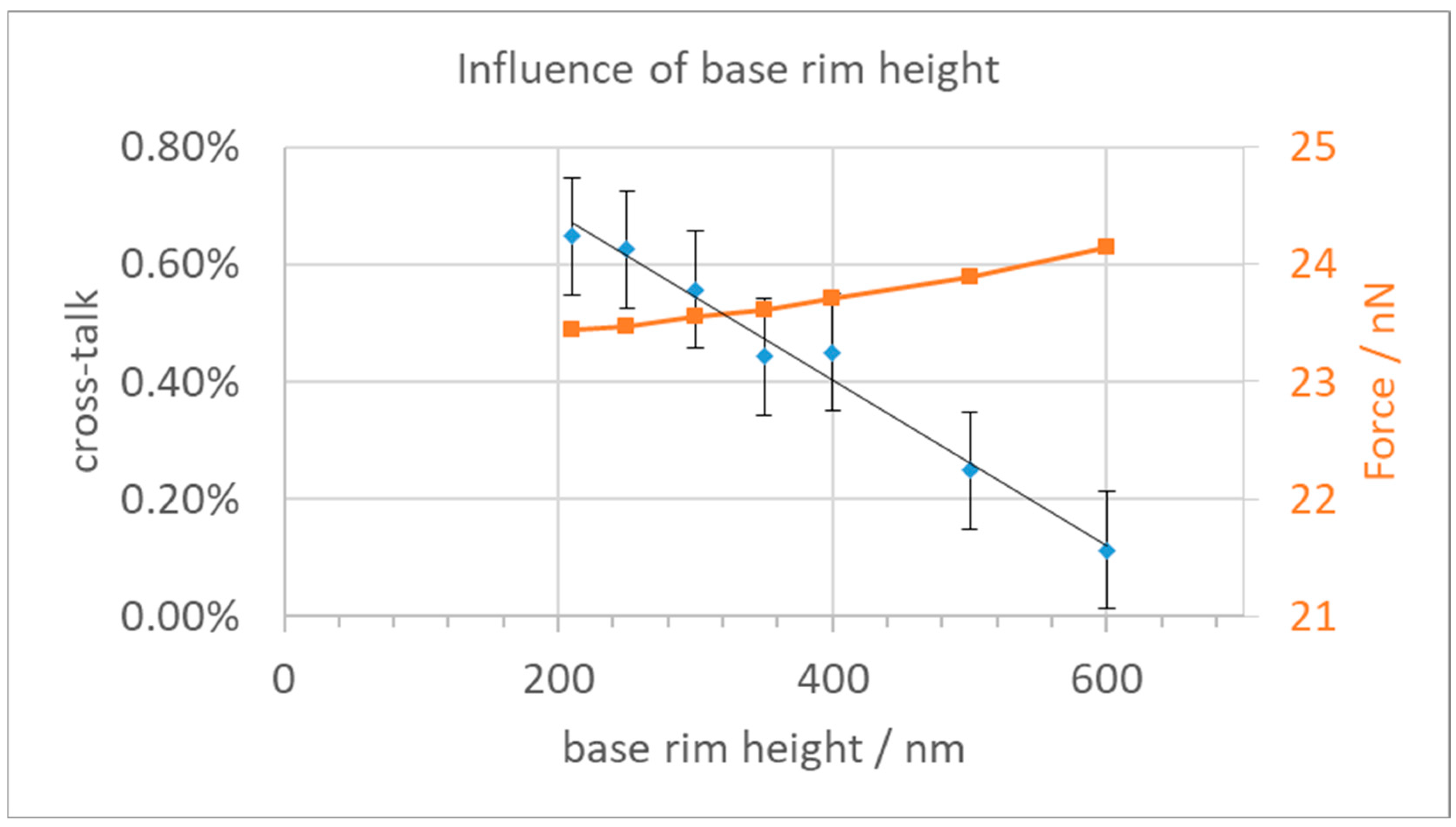
3.2. Design Variations and Their Cross-Talk
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- SPIE AR/VR/MR International Conference Series. Available online: https://spie.org/conferences-and-exhibitions/ar-vr-mr (accessed on 11 June 2024).
- Meta Quest 2. Available online: https://store.facebook.com/de/quest (accessed on 11 June 2024).
- Microsoft Hololens 2. Available online: https://www.microsoft.com/de-de/hololens (accessed on 11 June 2024).
- Article on Wikipedia. Available online: https://en.wikipedia.org/wiki/Virtual_reality_sickness (accessed on 11 June 2024).
- Daniel, F.; Kapoula, Z. Induced vergence-accommodation conflict reduces cognitive performance in the Stroop test. Sci. Rep. 2019, 9, 1247. [Google Scholar] [CrossRef]
- Zabels, R.; Osmanis, K.; Narels, M.; Gertners, U.; Ozols, A.; Rutenbergs, K.; Osmanis, I. AR Displays: Next-Generation Technologies to Solve the Vergence-Accomodation Conflict. Appl. Sci. 2019, 9, 3147. [Google Scholar] [CrossRef]
- Dunn, D.; Chakravarthula, P.; Dong, Q.; Fuchs, H. Mitigating vergence-accommodation conflict for near-eye displays via deformable beamsplitters. In Digital Optics for Immersive Displays, Proceedings of the SPIE Photonics Europe, Strasbourg, France, 22–26 April 2018; Proceedings of SPIE; SPIE: Bellingham, WA, USA, 2018; Volume 10676, p. 106760U. [Google Scholar] [CrossRef]
- Wilson, A.; Hua, H. Design and demonstration of a vari-focal optical see-through head-mounted display using freeform Alvarez lenses. Opt. Express 2019, 27, 15627–15637. [Google Scholar] [CrossRef]
- Ledentsov, N., Jr.; Shchukin, V.A.; Titkov, I.E.; Ledentsov, N.N.; Zeitner, U.D. Hyperchromatic multifocal 3D display for augmented reality applications. In Optical Architectures for Displays and Sensing in Augmented, Virtual, and Mixed Reality (AR, VR, MR) III, Proceedings of the SPIE AR VR MR, San Francisco, CA, USA, 23–26 January 2022; Proceedings of SPIE; SPIE: Bellingham, WA, USA, 2022; Volume 11931, p. 1193104. [Google Scholar] [CrossRef]
- Zhan, T.; Xiong, J.; Zou, J.; Wu, S.-T. Multifocal displays: Review and prospect. Proc. PhotoniX 2020, 1, 10. [Google Scholar] [CrossRef]
- Zhan, T.; Zou, J.; Lu, M.; Chen, E.; Wu, S.-T. Wavelengthmultiplexed multifocal displays. In Advances in Display Technologies X, Proceedings of the SPIE OPTO, 2020, San Francisco, CA, USA, 1–6 February 2020; Proceedings of SPIE; SPIE: Bellingham, WA, USA, 2020; Volume 11304, p. 1130408. [Google Scholar] [CrossRef]
- Hasnain, A.; Laffont, P.-Y.; Jalil, S.B.A.; Buyukburc, K.; Guillemet, P.-Y.; Wirajaya, S.; Khoo, L.; Deng, T.; Bazin, J.-C. Piezo-actuated varifocal head-mounted displays for virtualand augmented reality. In Advances in Display Technologies IX, Proceedings of the SPIE OPTO, 2019, San Francisco, CA, USA, 2–7 February 2019; Proceedings of SPIE; SPIE: Bellingham, WA, USA, 2019; Volume 10942, p. 1094207. [Google Scholar] [CrossRef]
- Zhou, Y.; Zhang, J.; Fang, F. Vergence-accommodation conflict in optical see-through display: Review and prospect. Results Opt. 2021, 5, 100160. [Google Scholar] [CrossRef]
- Lee, B.; Jo, Y.; Yoo, D.; Lee, J. Recent progresses of near-eye display for AR/VR. In Multimodal Sensing and Artificial Intelligence: Technologies and Applications II, Proceedings of the SPIE Optical Metrology, 2021, Online, 21–26 June 2021; Proceedings of SPIE; SPIE: Bellingham, WA, USA, 2021; Volume 11785, p. 1178503. [Google Scholar] [CrossRef]
- Reichelt, S.; Leister, N. Computational hologram synthesis and representation on spatial light modulators for real-time 3D holographic imaging. J. Phys. 2013, 415, 012038. [Google Scholar] [CrossRef]
- Reichelt, S.; Häussler, R.; Fütterer, G.; Leister, N.; Kato, H.; Usukura, N.; Kanbayashi, Y. Full-range, complex spatial light modulator for real-time holography. Opt. Lett. 2012, 37, 1955–1957. [Google Scholar] [CrossRef]
- Gerchberg, R.; Saxton, W. A practical algorithm for the determination of phase from image and diffraction plane pictures. Optik 1972, 35, 237–246. [Google Scholar]
- Häussler, R.; Leister, N.; Stolle, H. Large holographic 3D display for real-time computer-generated holography. In Proceedings of the Digital Optical Technologies 2017, Munich, Germany, 25–29 June 2017; International Society for Optics and Photonics: Bellingham, WA, USA, 2017; Volume 10335. [Google Scholar]
- Zhang, Z.; You, Z.; Chu, D. Fundamentals of phase-only liquid crystal on silicon (LCOS) devices. Sci. Appl. 2014, 3, e213. [Google Scholar] [CrossRef]
- Holoeye Company. LCoS Spatial Light Modulator Chips. Available online: https://holoeye.com/gaea-4k-phase-only-spatial-light-modulator/ (accessed on 11 June 2024).
- Hamamatsu Photonics KK, LCoS Spatial Phase Modulator Chips. Available online: https://www.hamamatsu.com/jp/en/product/optical-components/lcos-slm.html (accessed on 11 June 2024).
- Jasper Display Corp. LCoS Spatial Phase Modulator Chips. Available online: https://www.jasperdisplay.com/slm-products/ (accessed on 11 June 2024).
- Zhang, Y.; Fan, H.; Wang, F.; Gu, X.; Qian, X.; Poon, T.-C. Polygon-Based Computer-Generated Holography: A Review of Fundamentals and Recent Progress. Appl. Opt. 2022, 61, B363–B374. [Google Scholar] [CrossRef] [PubMed]
- Chakravarthula, P.; Tseng, E.; Fuchs, H.; Heide, F. Hogel-free Holography. ACM Trans. Graph. 2022, 41, 1–16. [Google Scholar] [CrossRef]
- Kim, J.; Gopakumar, M.; Choi, S.; Peng, Y.; Lopes, W.; Wetzstein, G. Holographic Glasses for Virtual Reality. In Proceedings of the SIGGRAPH ‘22: Special Interest Group on Computer Graphics and Interactive Techniques Conference, Vancouver, BC, Canada, 7–11 August 2022; Association for Computing Machinery: New York, NY, USA, 2022. [Google Scholar] [CrossRef]
- Texas Instruments Company, Digital Light Processing MEMS Mirrors. Available online: http://www.ti.com/dlp-chip/overview.html (accessed on 11 June 2024).
- Gehner, A.; Wildenhain, M.; Neumann, H.; Knobbe, J.; Komenda, O. MEMS analog light processing: An enabling technology for adaptive optical phase control. In MEMS/MOEMS Components and Their Applications III, Proceedings of the MOEMS-MEMS 2006 Micro and Nanofabrication, San Jose, CA, USA, 21–27 January 2006; Proceedings SPIE; SPIE: Bellingham, WA, USA, 2006; Volume 6113. [Google Scholar]
- Boston Micromachines Corporation. Deformable Micro Mirrors. Available online: http://www.bostonmicromachines.com/ (accessed on 11 June 2024).
- Iris AO Inc. Deformable Micro Mirrors. Available online: http://www.irisao.com/ (accessed on 11 June 2024).
- Barlett, T.A.; McDonald, W.C.; Hall, J.N. Adapting Texas Instuments DLP technology to demonstrate a phase spatial light modulator. In Emerging Digital Micromirror Device Based Systems and Applications XI, Proceedings of the SPIE OPTO 2019, San Francisco, CA, USA, 2–7 February 2019; Proceedings SPIE; SPIE: Bellingham, WA, USA, 2019; Volume 10932, p. 109320S. [Google Scholar]
- Oden, P.I.; Barlett, T.A.; McDonald, W.C.; Baker, J.C.; Hall, J.N. Innovations with a massively paralleled, microelectromechanical systems (MEMS) toward piston-mode-based phase light modulator (PLM). In Emerging Digital Micromirror Device Based Systems and Applications XI, Proceedings of the SPIE OPTO 2020, San Francisco, CA, USA, 1–6 February 2020; Proceedings SPIE; SPIE: Bellingham, WA, USA, 2020; Volume 11294, p. 112940G. [Google Scholar]
- Barlett, T.; McDonald, W.; Hall, J.; Oden, P.; Doane, D.; Ketchum, R.S.; Byrum, T. Recent advances in the development of the Texas Instrument phase-only microelectromechanical systems (MEMS) spatial light modulator. In Emerging Digital Micromirror Device Based Systems and Applications XIII, Proceedings of the SPIE OPTO 2021, Online, 6–12 March 2021; Proceedings SPIE; SPIE: Bellingham, WA, USA, 2021; Volume 11698, p. 116980O. [Google Scholar]
- Wagner, T.; Leister, N.; Sahm, H.; Zozgornik, S.; Teich, M.; Pleikies, J.; Stolle, H. Advantages of Phase Modulating MEMS for Full 3D Hologram Scene Reconstruction. In Proceedings of the Optica Conference ‘Digital Holography and Three-Dimensional Imaging’, Cambridge, UK, 1–4 August 2022. [Google Scholar]
- Dürr, P.; Neudert, A.; Kunze, D.; Friedrichs, M. MEMS Piston Mirror Arrays with Force-Balanced Single Spring. In MOEMS and Miniaturized Systems XVIII, Proceedings of the SPIE OPTO 2019, San Francisco, CA, USA, 2–7 February 2019; Proceedings SPIE; SPIE: Bellingham, WA, USA, 2019; Volume 10931, p. 1093104. [Google Scholar]
- Neudert, A.; Felsberg, L.; Duerr, P. MEMS Aktuator-Array mit Kammantrieb und verbesserter Linearität. In MikroSystemTechnik Kongress 2019; VDE-Verlag: Berlin, Germany, 2019; S. 197ff; ISBN 978-3-8007-5090-0. [Google Scholar]
- Duerr, P.; Neudert, A.; Hohle, C.; Stolle, H.; Pleikies, J.; Sahm, H. MEMS Spatial Light Modulators for Real Holographic 3D Displays. In Proceedings of the Mikrosystemtechnik Congress 2021, Stuttgart-Ludwigsburg, Germany, 8–10 November 2021; VDE: New York, NY, USA, 2021. [Google Scholar]
- Duerr, P.; Neudert, A.; Nitzsche, M.; Hohle, C.; Stolle, H.; Pleikies, J. MEMS piston mirror arrays for computer generated holography. In MOEMS and Miniaturized Systems XXI, Proceedings of the SPIE OPTO 2022, San Francisco, CA, USA, 22 January–28 February 2022; Proceedings SPIE; SPIE: Bellingham, WA, USA, 2022; Volume 12013. [Google Scholar]
- Nitzsche, M.; Duerr, P.; Neudert, A. Improved comb drive design for MEMS piston mirror arrays. In MOEMS and Miniaturized Systems XXII, Proceedings of the SPIE OPTO 2023, San Francisco, CA, USA, 28 January–3 February 2023; Proceedings SPIE; SPIE: Bellingham, WA, USA, 2023; Volume 12434, p. 124340R. [Google Scholar] [CrossRef]
- Döring, S.; Recknagel, P.; Hohle, C.; Dürr, P. MEMS-on-CMOS-Integration of Spatial Light Modulator for Holographic MR/AR Applications. In Proceedings of the MikroSystemTechnik Kongress, Dresden, Deutschland, 23–25 October 2023. [Google Scholar]
- Döring, S.; Recknagel, P.A.; Hohle, C.; Dürr, P. MEMS-on-CMOS integration of a holographic 8M-Pixel SLM device using KrF-Lithography. In Advanced Etch Technology and Process Integration for Nanopatterning XIII, Proceedings of the SPIE Advanced Lithography + Patterning, San Jose, CA, USA, 25 February–1 March 2024; Proceedings SPIE, © 2024 SPIE 0277-786X; SPIE: Bellingham, WA, USA, 2024; Volume 12958, p. 1295809. [Google Scholar] [CrossRef]
- Nitzsche, M.; Bajpai, A.; Duerr, P.; Neudert, A.; Pranti, A.S. First Characterization of Comb Drive Based Micro Mirror Arrays. In Proceedings of the MikroSystemTechnik Kongress 2023, Dresden, Germany, 23–25 October 2023. [Google Scholar]
- González, S.F.; Nitzsche, M.; Bajpai, A.; Pranti, A.S.; Neudert, A.; Duerr, P. Characterization of MEMS piston mirror arrays with comb drive actuator. In MOEMS and Miniaturized Systems XXIII, Proceedings of the SPIE OPTO 2024, San Francisco, CA, USA, 27 January–1 February 2024; Proceedings; SPIE: Bellingham, WA, USA, 2024; Volume 12899, p. 128990D. [Google Scholar] [CrossRef]
- REALHOLO Internet Site. Available online: https://realholo.eu/ (accessed on 11 June 2024).
- Duerr, P.; Neudert, A. Patent Application ‘MEMS Having a Movable Structural Element and MEMS Array’. WO2019/219511; DE102018207783, 4 March 2021. [Google Scholar]
- Wang, Y.; Wu, M.C. Micromirror based optical phased array for wide-angle beamsteering. In Proceedings of the 2017 IEEE 30th International Conference on Micro Electro Mechanical Systems (MEMS), Las Vegas, NV, USA, 22–26 January 2017; pp. 897–900. [Google Scholar] [CrossRef]
- Zickar, M.; Mita, M.; Ataka, M.; Fujita, H. Low cross talk design and simple fabrication process of electrostatic vertical comb-drive actuators for positioning application. IEEJ Trans. Electr. Electron. Eng. 2007, 2, 289–294. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |  |
| pixel count | 4000 × 2400 | |
| pixel size | 4 µm × 6 µm | |
| frame rate | >1 kHz | |
| vertical deflection range | 0 … 350 nm | |
| deflection precision | 8-bit | |
| mirror tilt | <0.1° | |
| pixel addressing voltage | 0 … 3.3 V | |
| power dissipation | <2.5 W |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Neudert, A.; Duerr, P.; Nitzsche, M. An FEM Study on Minimizing Electrostatic Cross-Talk in a Comb Drive Micro Mirror Array. Micromachines 2024, 15, 942. https://doi.org/10.3390/mi15080942
Neudert A, Duerr P, Nitzsche M. An FEM Study on Minimizing Electrostatic Cross-Talk in a Comb Drive Micro Mirror Array. Micromachines. 2024; 15(8):942. https://doi.org/10.3390/mi15080942
Chicago/Turabian StyleNeudert, Andreas, Peter Duerr, and Mario Nitzsche. 2024. "An FEM Study on Minimizing Electrostatic Cross-Talk in a Comb Drive Micro Mirror Array" Micromachines 15, no. 8: 942. https://doi.org/10.3390/mi15080942
APA StyleNeudert, A., Duerr, P., & Nitzsche, M. (2024). An FEM Study on Minimizing Electrostatic Cross-Talk in a Comb Drive Micro Mirror Array. Micromachines, 15(8), 942. https://doi.org/10.3390/mi15080942