
Characteristic Study of a Typical Satellite Solar Panel under Mechanical Vibrations


Abstract
:1. Introduction
2. Structural Dynamics and Photovoltaic Power Model of a Typical Solar Panel
2.1. Structural Dynamics Model of a Typical Solar Panel
- The solar array consisted of three rectangular plates connected by torsion springs, and the substructures, such as rectangular plates and springs, can be described by a linear model. This means that the deformation of the plates and the torsion springs was within the linear elasticity range, and the geometric and material nonlinearity of the structure’s deformation was not considered.
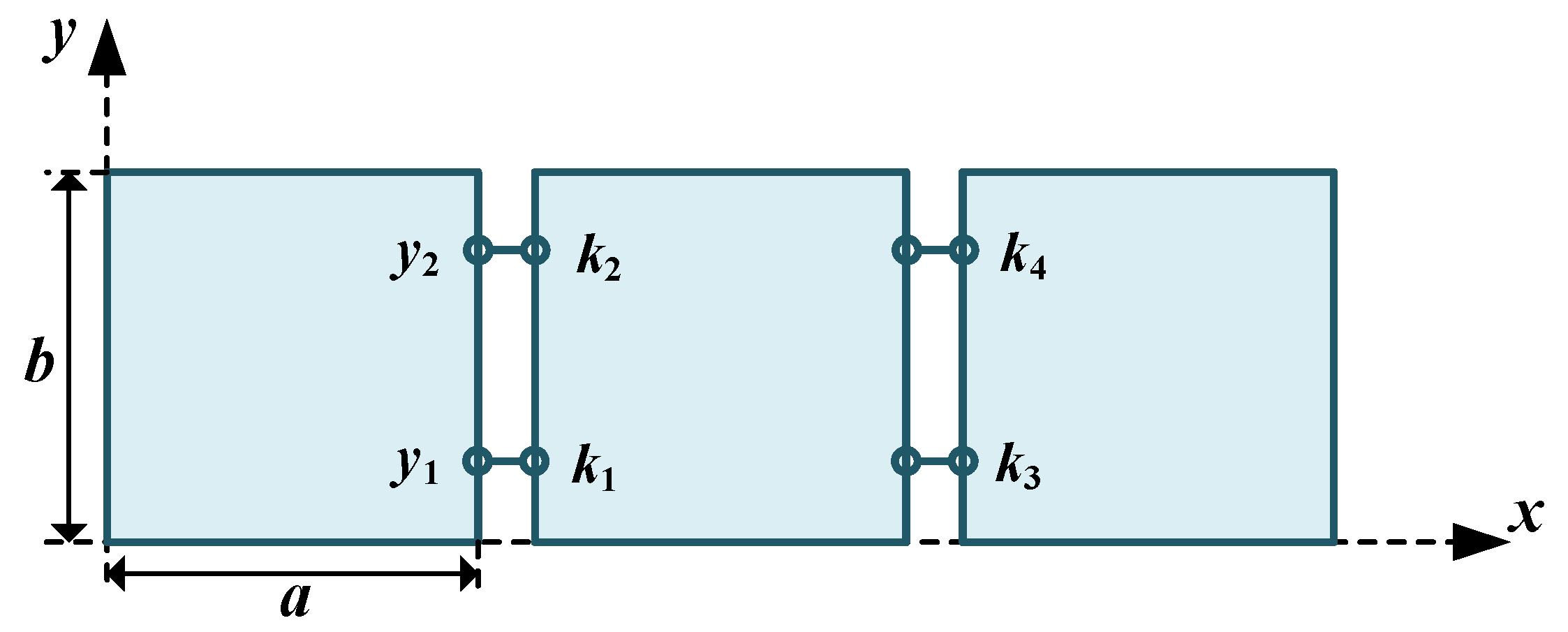
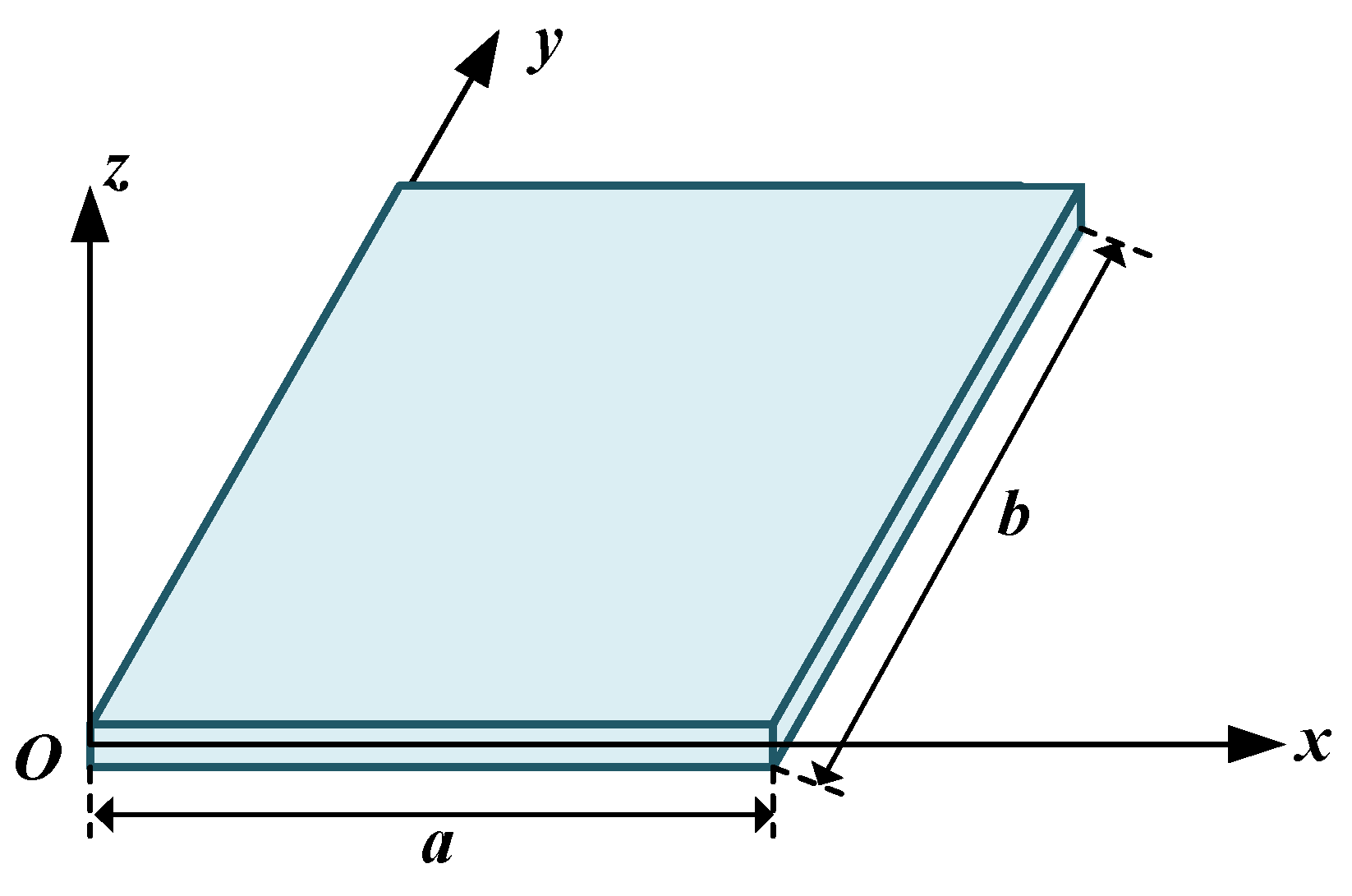
- The rigid-body motion of the spacecraft flight was fixed, and only the elastic vibration of the panel is discussed. The first plate was fixed to the spacecraft body, and the reference coordinate system is shown in Figure 1.
- The two plates were connected by two torsion springs, which had rotational freedom only around the y-axis. The torsion springs and joints were small, and their structures ensured the effective transmission of torque, shear force, and axial force.
- The panel formed a stable system when it was completely unfolded, meaning that the rectangular plates and the connecting torsion springs were well fixed.
- The geometry and mass of the torsion spring joints were neglected. The axial and shear deformation of the torsion springs was not considered; only the change in the torsion angle was considered.
- The longitudinal stiffness of the solar panel was very large, and the waving vibration was negligible.
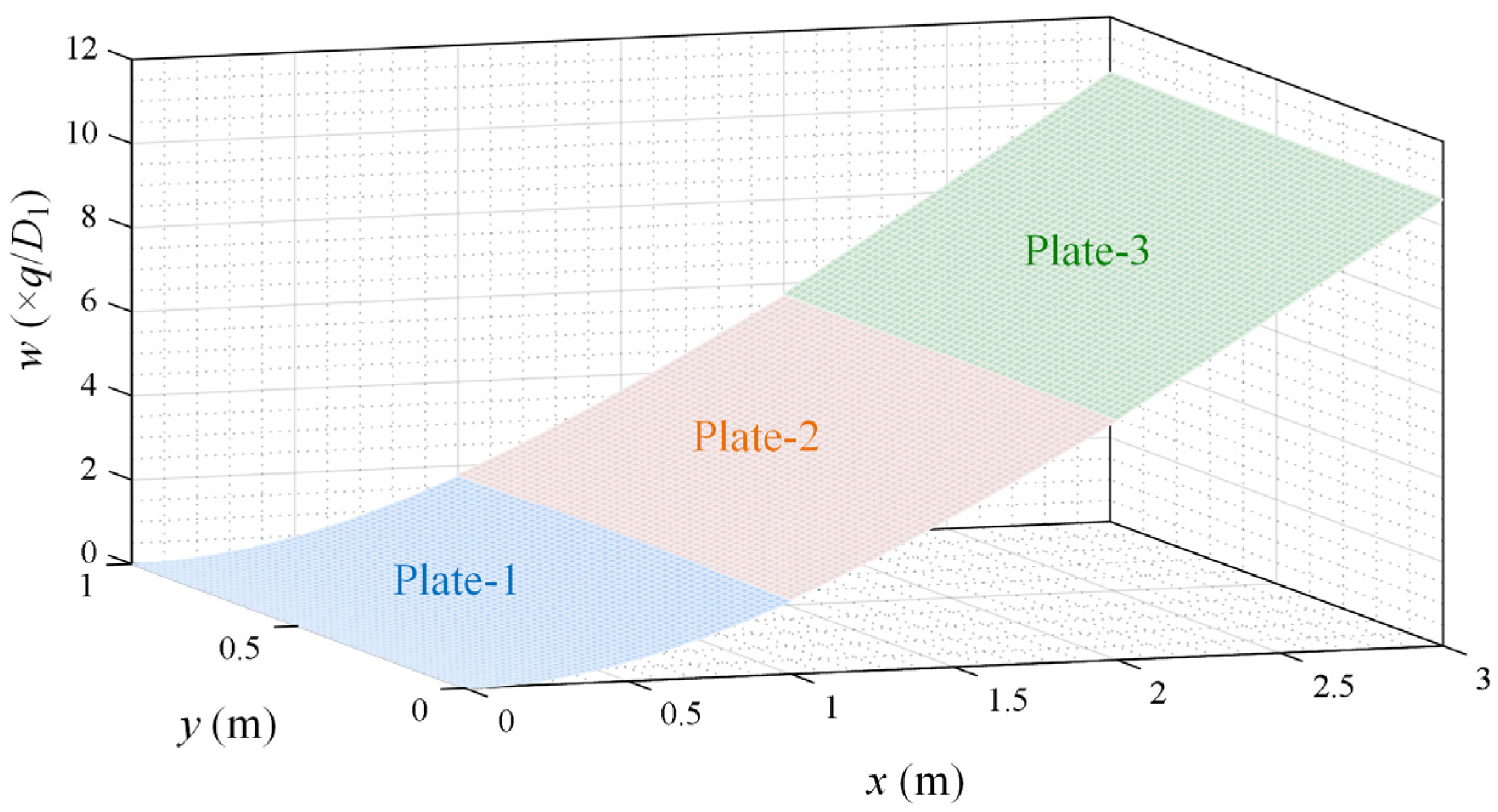
2.1.1. Deflection Model of the Solar Panel
2.1.2. First-Order Resonant Frequency of the Solar Panel
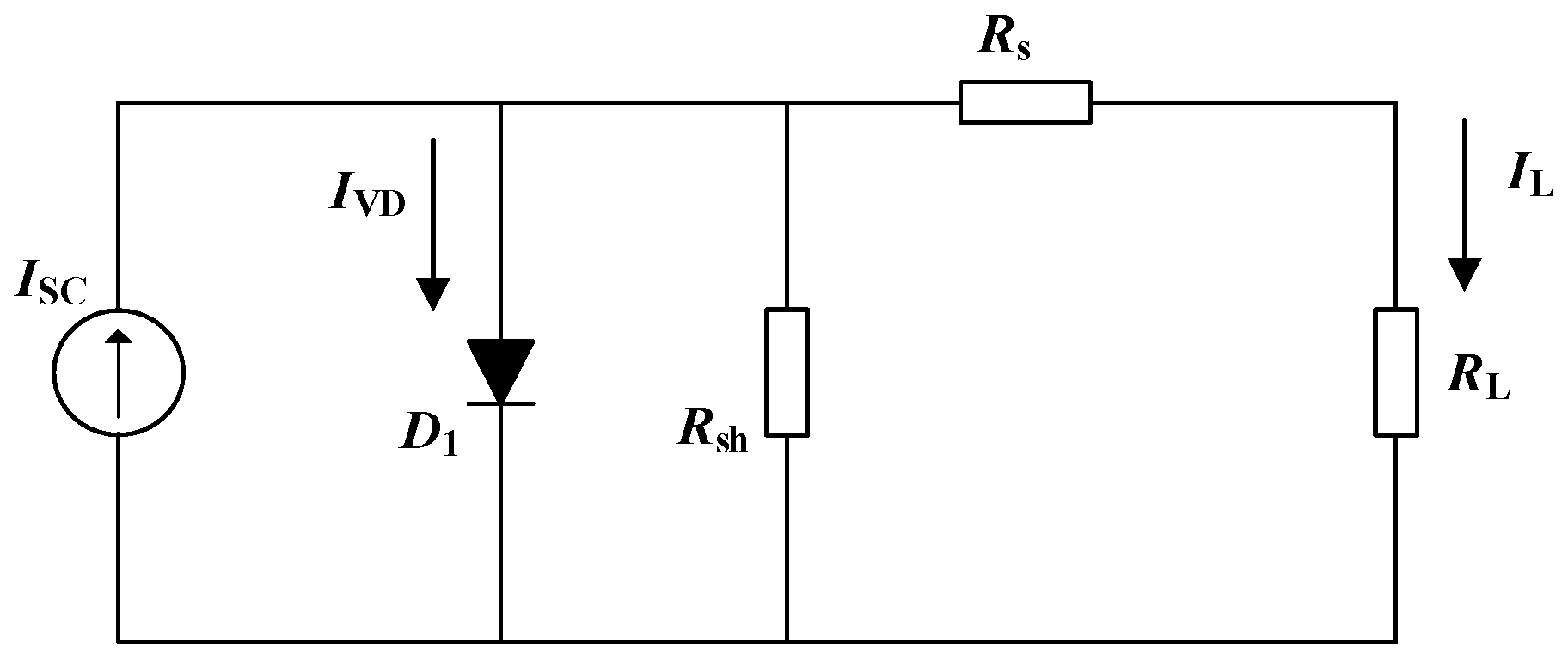
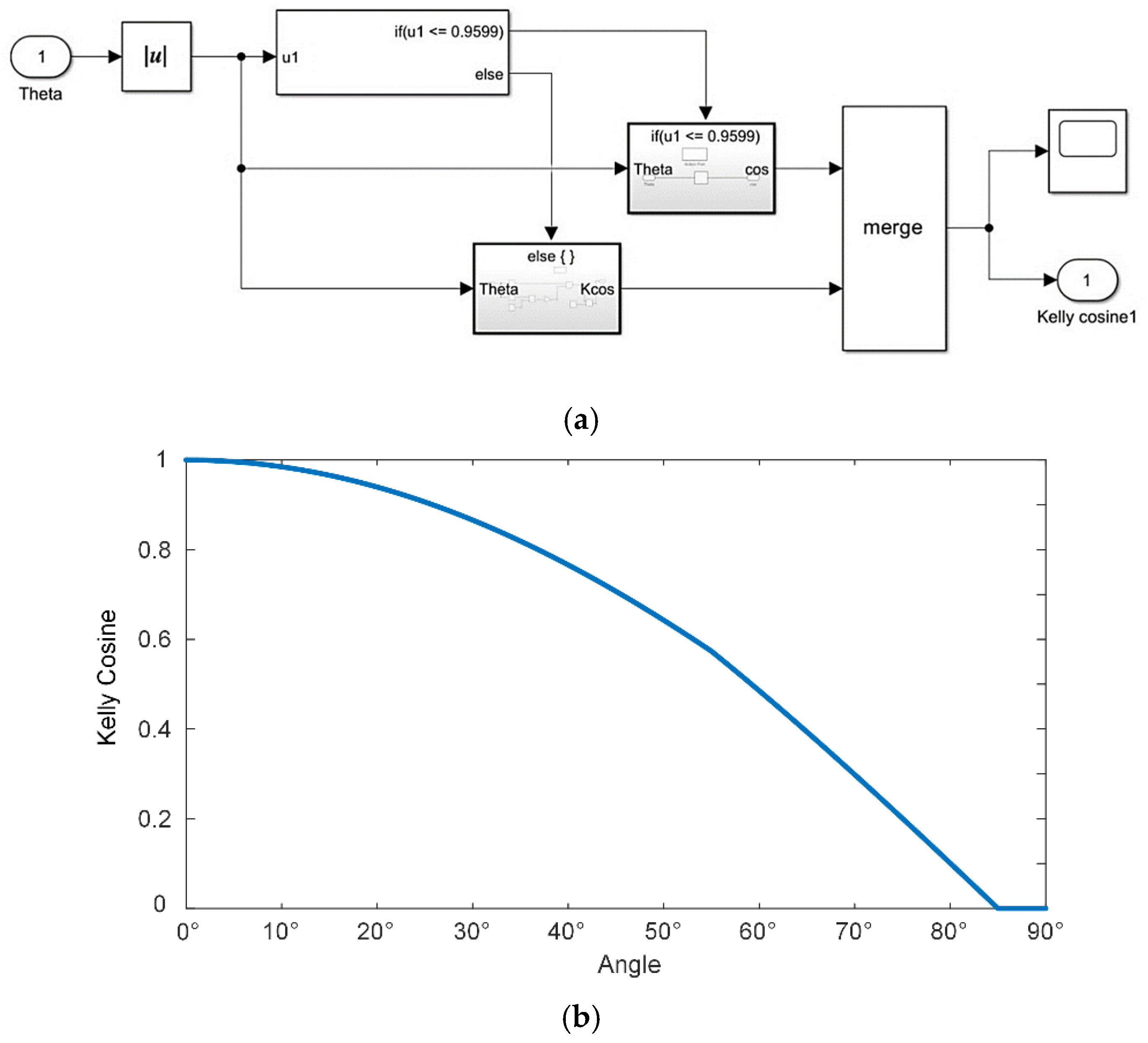
2.2. Photovoltaic Power-Generation Model of a Typical Solar Panel
3. Structural Dynamics and Photovoltaic Power Modeling of a Typical Solar Panel
3.1. Parameter Validation of Photovoltaic Power-Generation Model under Dynamic Conditions
3.1.1. Simulation of Photovoltaic Power-Generation Model
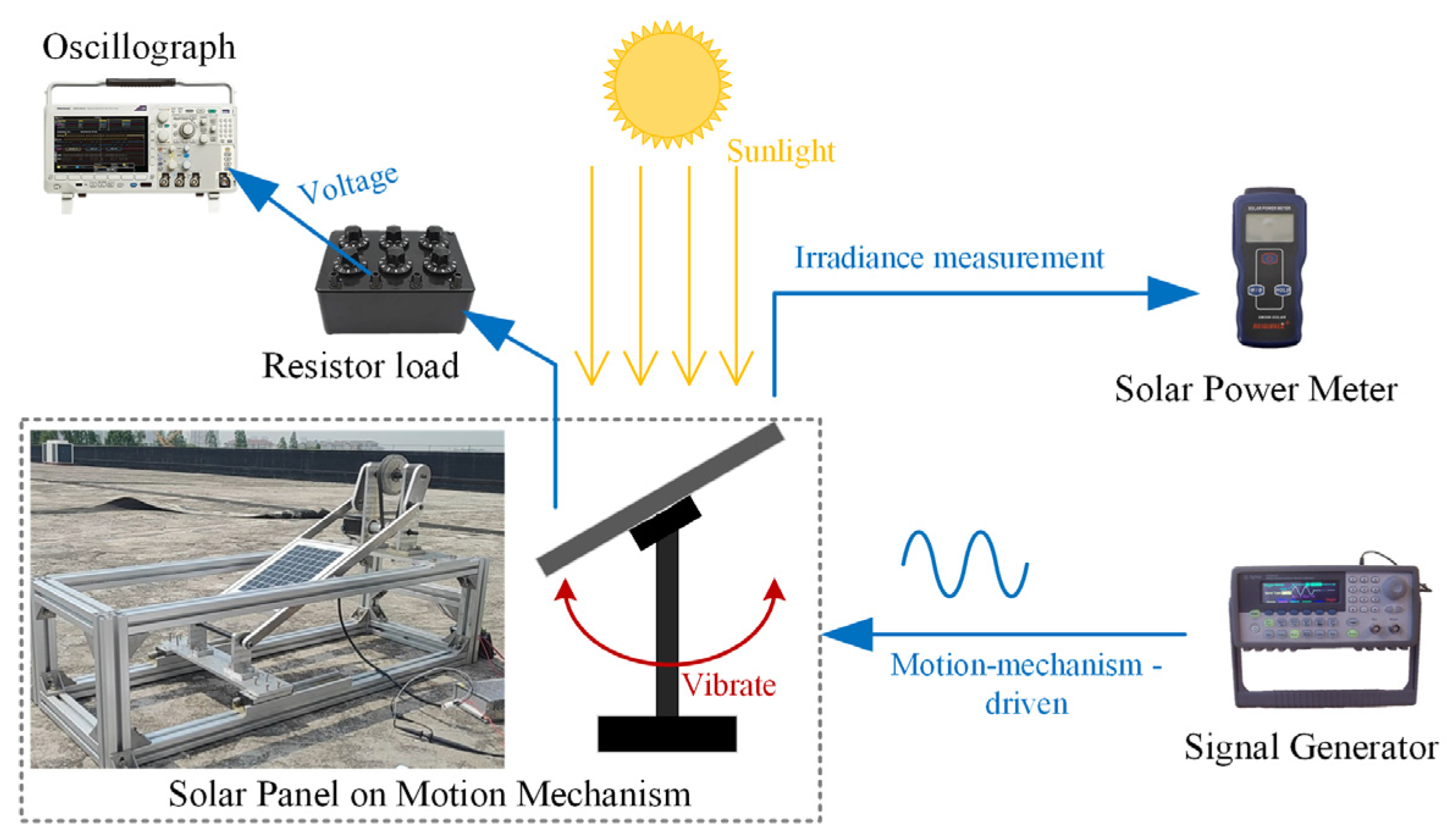
3.1.2. Validation of Photovoltaic Power-Generation Model
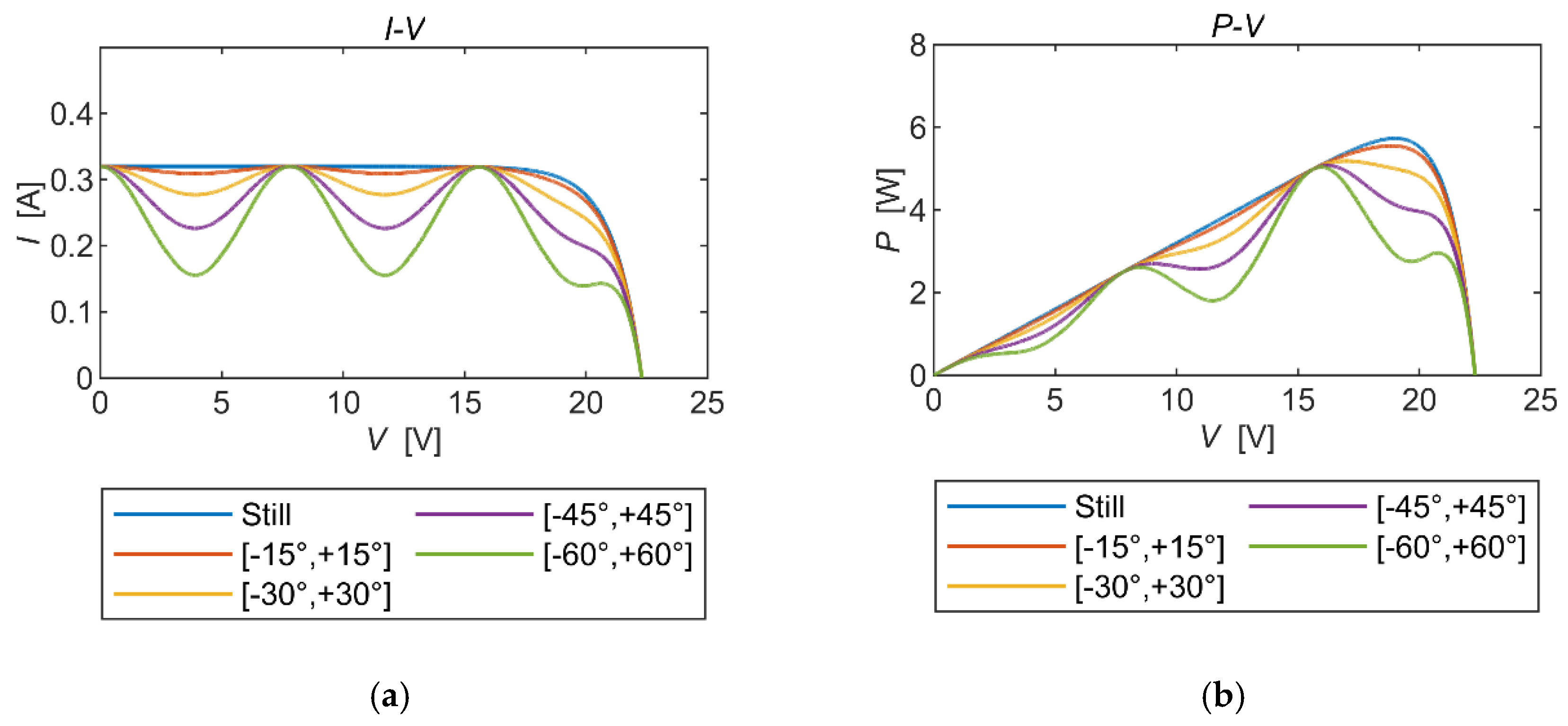
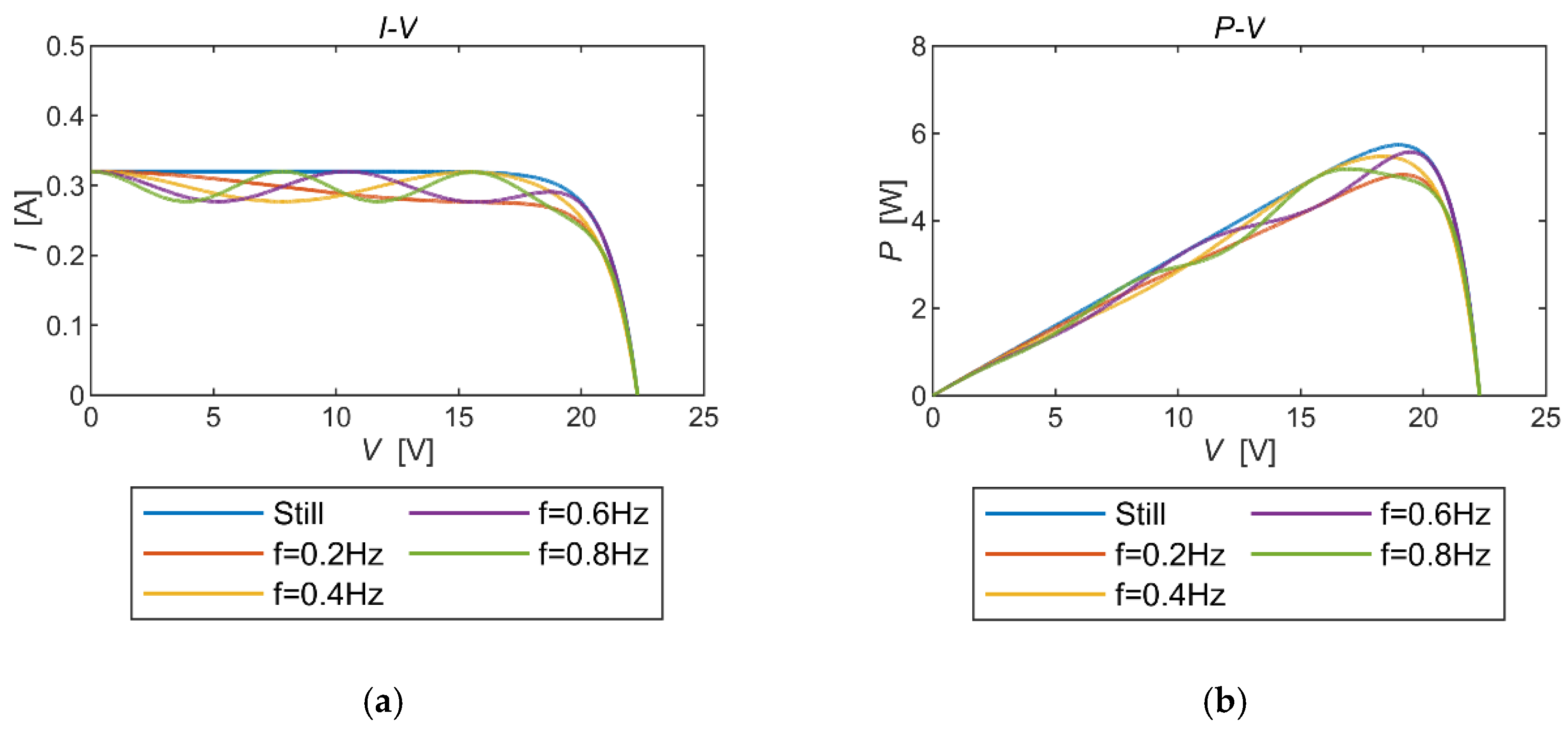
3.2. Power-Generation Characterization of a Typical Solar Panel under Dynamic Conditions
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Xia, L.; Ma, S.; Tao, P.; Pei, W.; Liu, Y.; Tao, L.; Wu, Y. A wind-solar hybrid energy harvesting approach based on wind-induced vibration structure applied in smart agriculture. Micromachines 2022, 14, 58. [Google Scholar] [CrossRef] [PubMed]
- Dubey, S.; Sarvaiya, J.N.; Seshadri, B. Temperature Dependent Photovoltaic (PV) Efficiency and Its Effect on PV Production in the World—A Review. Energy Procedia 2013, 33, 311–321. [Google Scholar] [CrossRef]
- Glick, A.; Smith, S.E.; Ali, N.; Bossuyt, J.; Recktenwald, G.; Calaf, M.; Cal, R.B. Influence of flow direction and turbulence intensity on heat transfer of utility-scale photovoltaic solar farms. Sol. Energy 2020, 207, 173–182. [Google Scholar] [CrossRef]
- Huang, L.; Song, Z.; Dong, Q.; Song, Y.; Zhao, X.; Qi, J.; Shi, L. Surface temperature and power generation efficiency of PV arrays with various row spacings: A full-scale outdoor experimental study. Appl. Energy 2024, 367, 123362. [Google Scholar] [CrossRef]
- Cuce, E.; Cuce, P.M.; Bali, T. An experimental analysis of illumination intensity and temperature dependency of photovoltaic cell parameters. Appl. Energy 2013, 111, 374–382. [Google Scholar] [CrossRef]
- Hasan, K.; Yousuf, S.B.; Tushar, M.S.H.K.; Das, B.K.; Das, P.; Islam, S. Effects of different environmental and operational factors on the PV performance: A comprehensive review. Energy Sci. Eng. 2021, 10, 656–675. [Google Scholar] [CrossRef]
- Mohammed, H.; Kumar, M.; Gupta, R. Bypass diode effect on temperature distribution in crystalline silicon photovoltaic module under partial shading. Sol. Energy 2020, 208, 182–194. [Google Scholar] [CrossRef]
- Vieira, R.G.; de Araújo, F.M.U.; Dhimish, M.; Guerra, M.I.S. A comprehensive review on bypass diode application on photovoltaic modules. Energies 2020, 13, 2472. [Google Scholar] [CrossRef]
- Abdulmawjood, K.; Alsadi, S.; Refaat, S.S.; Morsi, W.G. Characteristic study of solar photovoltaic array under different partial shading conditions. IEEE Access 2022, 10, 6856–6866. [Google Scholar] [CrossRef]
- Bakker, K.; Weeber, A.; Theelen, M. Reliability implications of partial shading on CIGS photovoltaic devices: A literature review. J. Mater. Res. 2019, 34, 3977–3987. [Google Scholar] [CrossRef]
- Osmani, K.; Haddad, A.; Alkhedher, M.; Lemenand, T.; Castanier, B.; Ramadan, M. Anovel MPPT-Based ithium-Ion battery solar charger for operation under fluctuating irradiance conditions. Sustainability 2023, 15, 9839. [Google Scholar] [CrossRef]
- Ali, A.I.M.; Mohamed, H.R.A. Improved P&O MPPT algorithm with efficient open-circuit voltage estimation for two-stage grid-integrated PV system under realistic solar radiation. Int. J. Electr. Power Energy Syst. 2022, 137, 107805. [Google Scholar]
- Schmid, J.; Drapalik, M.; Kancsar, E.; Schlosser, V.; Klinger, G. A study of power quality loss in PV modules caused by wind induced vibration located in Vienna. Sol. Energy 2011, 85, 1530–1536. [Google Scholar] [CrossRef]
- Saygin, D.; Kempener, R.; Wagner, N.; Ayuso, M.; Gielen, D. The implications for renewable energy innovation of doubling the share of renewables in the global energy mix between 2010 and 2030. Energies 2015, 8, 5828–5865. [Google Scholar] [CrossRef]
- Zhang, Y.; Yuan, C. Effects of vibration on output characteristics of shipboard PV modules. Reg. Stud. Mar. Sci. 2021, 47, 101989. [Google Scholar] [CrossRef]
- Vidović, V.; Krajačić, G.; Matak, N.; Stunjek, G.; Mimica, M. Review of the potentials for implementation of floating solar panels on lakes and water reservoirs. Renew. Sustain. Energy Rev. 2023, 178, 113237. [Google Scholar] [CrossRef]
- Shen, X.; Wang, X.; Yu, M.; Wang, H.; Xu, F.; Zhang, Q. Crumpled Nanogenerator Based on Elastic Modulus Design for Fully Self-Powered High-Speed Rail Speed Measurement. ACS Appl. Nano Mater. 2024, 7, 15478–15487. [Google Scholar] [CrossRef]
- Wu, Y.; Yuan, Q.; Ren, K.; Shen, X.; Shen, H.; Badel, A.; Qiu, J. Bidirectional energy-controlled piezoelectric shunt damping technology and its vibration attenuation performance. Int. J. Mech. Syst. Dyn. 2024, 4, 63–76. [Google Scholar] [CrossRef]
- Patel, M.R. Spacecraft Power Systems, 1st ed.; CRC Press: Boca Raton, FL, USA, 2004; 732p. [Google Scholar]
- Xu, R.; Li, D.; Jiang, J. An online learning-based fuzzy control method for vibration control of smart solar panel. J. Intell. Mater. Syst. Struct. 2015, 26, 2547–2555. [Google Scholar] [CrossRef]
- Li, D.; Liu, W. Vibration control for the solar panels of spacecraft: Innovation methods and potential approaches. Int. J. Mech. Syst. Dyn. 2023, 3, 300–330. [Google Scholar] [CrossRef]
- Li, D.; Deng, Z.; Chen, G. Free vibration of functionally graded sandwich plates in thermal environments. Int. J. Mech. Syst. Dyn. 2023, 3, 39–47. [Google Scholar] [CrossRef]
- Tsai, H.L.; Tu, C.S.; Su, Y.J. Development of generalized photovoltaic model using MATLAB/SIMULINK. Lect. Notes Eng. Comput. Sci. 2008, 2008, 2173. [Google Scholar]
- Gow, J.; Manning, C. Development of a photovoltaic array model for use in power-electronics simulation studies. IEE Proc. Electr. Power Appl. 1999, 146, 193–200. [Google Scholar] [CrossRef]
- Singer, S.; Rozenshtein, B.; Surazi, S. Characterization of PV array output using a small number of measured parameters. Sol. Energy 1984, 32, 603–607. [Google Scholar] [CrossRef]
- Zhang, Q.; Zhang, Y. Design and verification of an integrated panoramic sun sensor atop a small spherical satellite. Sensors 2022, 22, 8130. [Google Scholar] [CrossRef]
- Wu, Y.; Li, S.; Fan, K.; Ji, H.; Qiu, J. Investigation of an ultra-low frequency piezoelectric energy harvester with high frequency up-conversion factor caused by internal resonance mechanism. Mech. Syst. Signal Process. 2022, 162, 108038. [Google Scholar] [CrossRef]
- Stanciu, C.; Stanciu, D. Optimum tilt angle for flat plate collectors all over the world—A declination dependence formula and comparisons of three solar radiation models. Energy Convers. Manag. 2014, 81, 133–143. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Plate-1 | Plate-2 | Plate-3 | ||
|---|---|---|---|---|
| Rectangular plate size: a × b | 1 × 1 m × m | |||
| Density: ρ | 1700 kg/m3 | |||
| Elastic modulus: E | 1.5 × 1011 Pa | |||
| Poisson’s ratio | μ1= 0.3; μ2 = 0.15 | |||
| Torsion spring positions | y1 = 0.25 m; y2 = 0.75 m | |||
| First-order resonant frequency: f | 0.3754 Hz | |||
| Rotation angle | q = 1 N/m2 | 7.1830° | 16.4648° | 20.4489° |
| q = 2 N/m2 | 14.1470° | 30.5870° | 36.7132° | |
| q = 3 N/m2 | 20.7107° | 41.5614° | 48.2042° | |
| q = 5 N/m2 | 32.2165° | 55.9132° | 61.7917° | |
| q = 10 N/m2 | 51.5687° | 71.3064° | 74.9871° | |
| Parameters | Names | Value |
|---|---|---|
| Short-circuit current | Isc | 0.32 A |
| Open-circuit voltage | Voc | 22.3 V |
| Maximum power point current | Tm | 0.28 A |
| Maximum power point voltage | Vm | 17.90 V |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, X.; Wu, Y.; Yuan, Q.; He, J.; Zhou, C.; Shen, J. Characteristic Study of a Typical Satellite Solar Panel under Mechanical Vibrations. Micromachines 2024, 15, 996. https://doi.org/10.3390/mi15080996
Shen X, Wu Y, Yuan Q, He J, Zhou C, Shen J. Characteristic Study of a Typical Satellite Solar Panel under Mechanical Vibrations. Micromachines. 2024; 15(8):996. https://doi.org/10.3390/mi15080996
Chicago/Turabian StyleShen, Xin, Yipeng Wu, Quan Yuan, Junfeng He, Chunhua Zhou, and Junfeng Shen. 2024. "Characteristic Study of a Typical Satellite Solar Panel under Mechanical Vibrations" Micromachines 15, no. 8: 996. https://doi.org/10.3390/mi15080996