
Development of a High-Sensitivity Acoustic Sensor Based on Grating Interferometer Combined with Glass Diaphragm


Abstract
:
1. Introduction
2. Theory and Design Guidelines
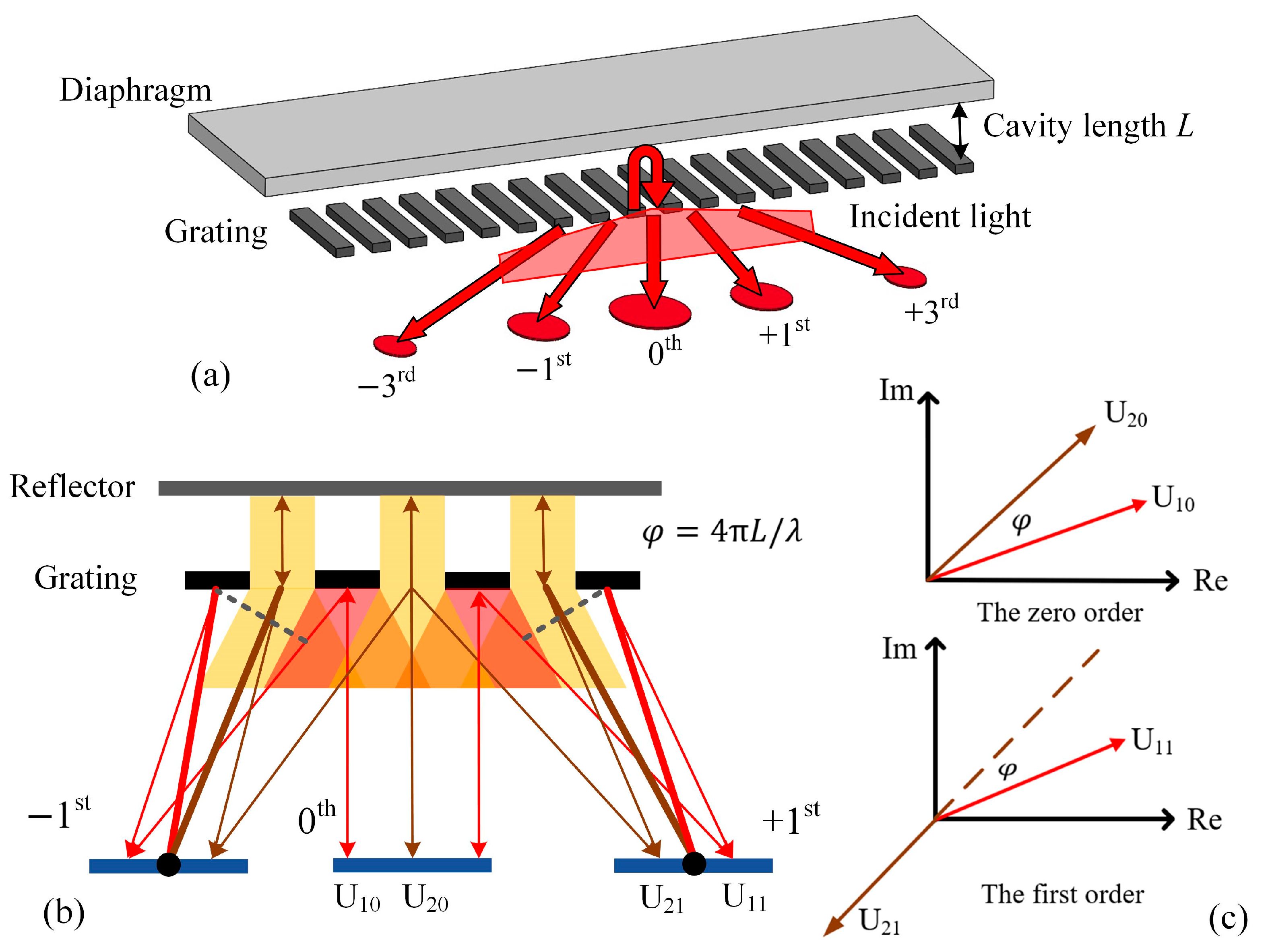
2.1. Theory of Grating Interferometer-Based Sensor
2.2. Design Guidelines for the Interference Cavity
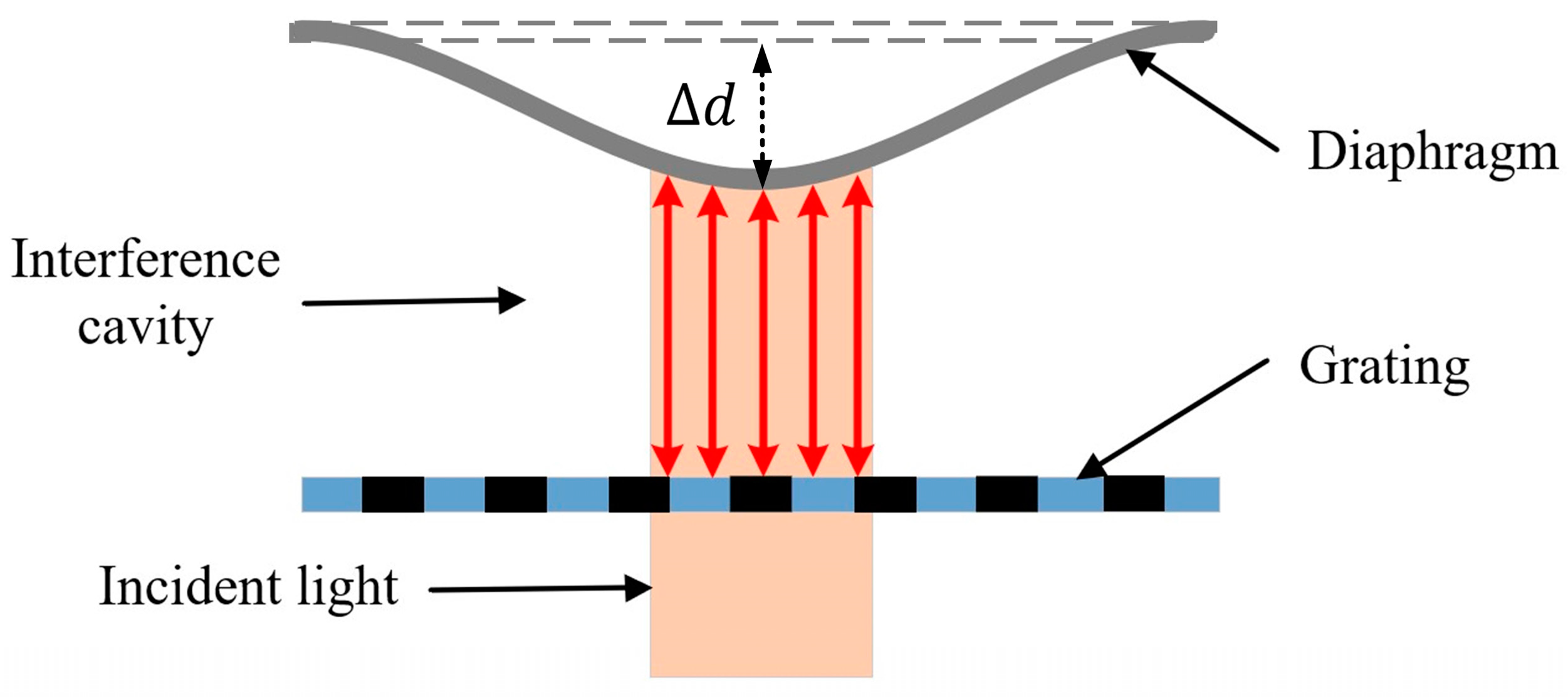
2.2.1. Static Deformation of the Diaphragm
2.2.2. The Incident Light Beam
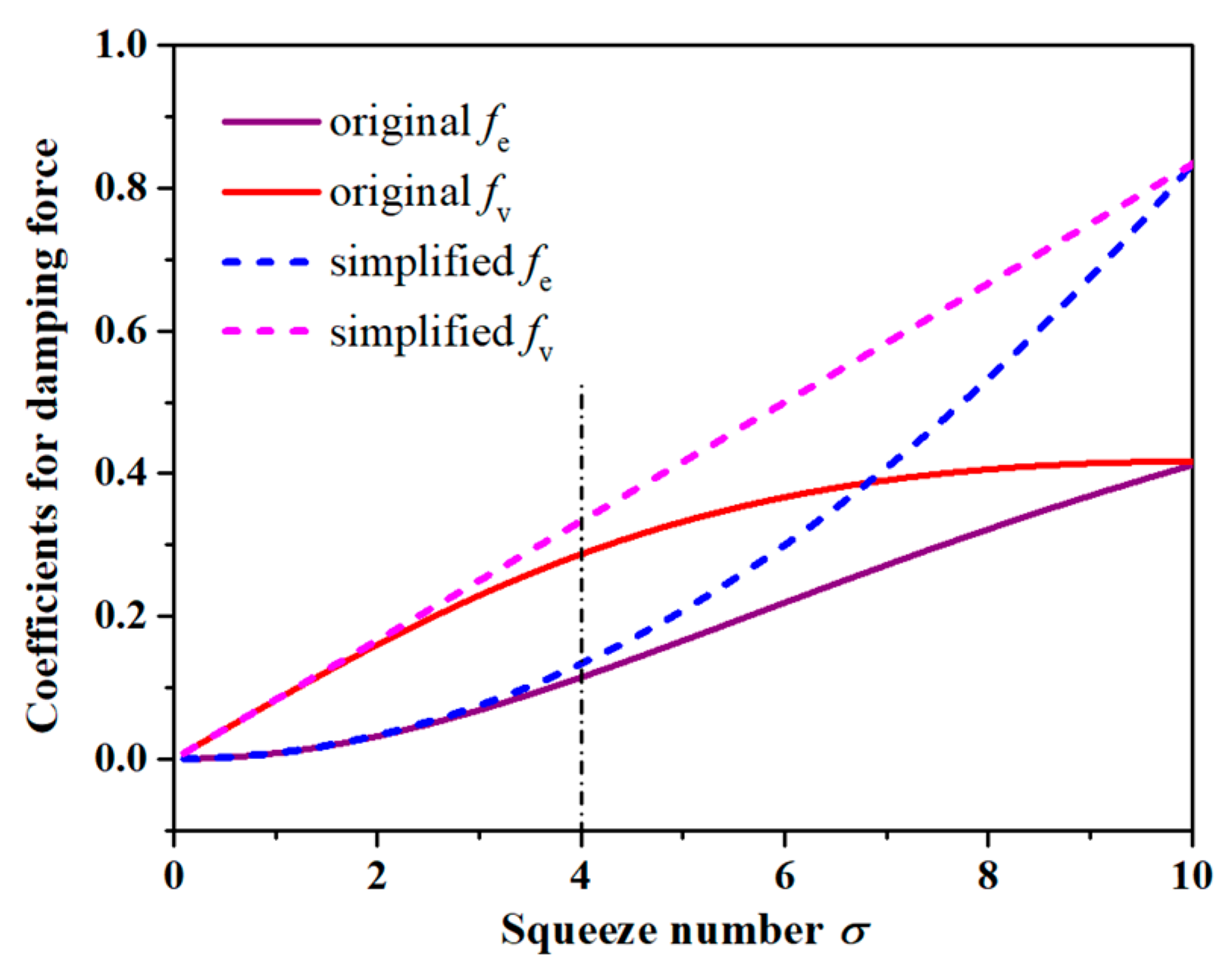
2.2.3. Squeeze Film Damping
2.2.4. The Key Parameters
3. Design and Fabrication of the Acoustic Sensor
3.1. Structure of the Acoustic Sensor
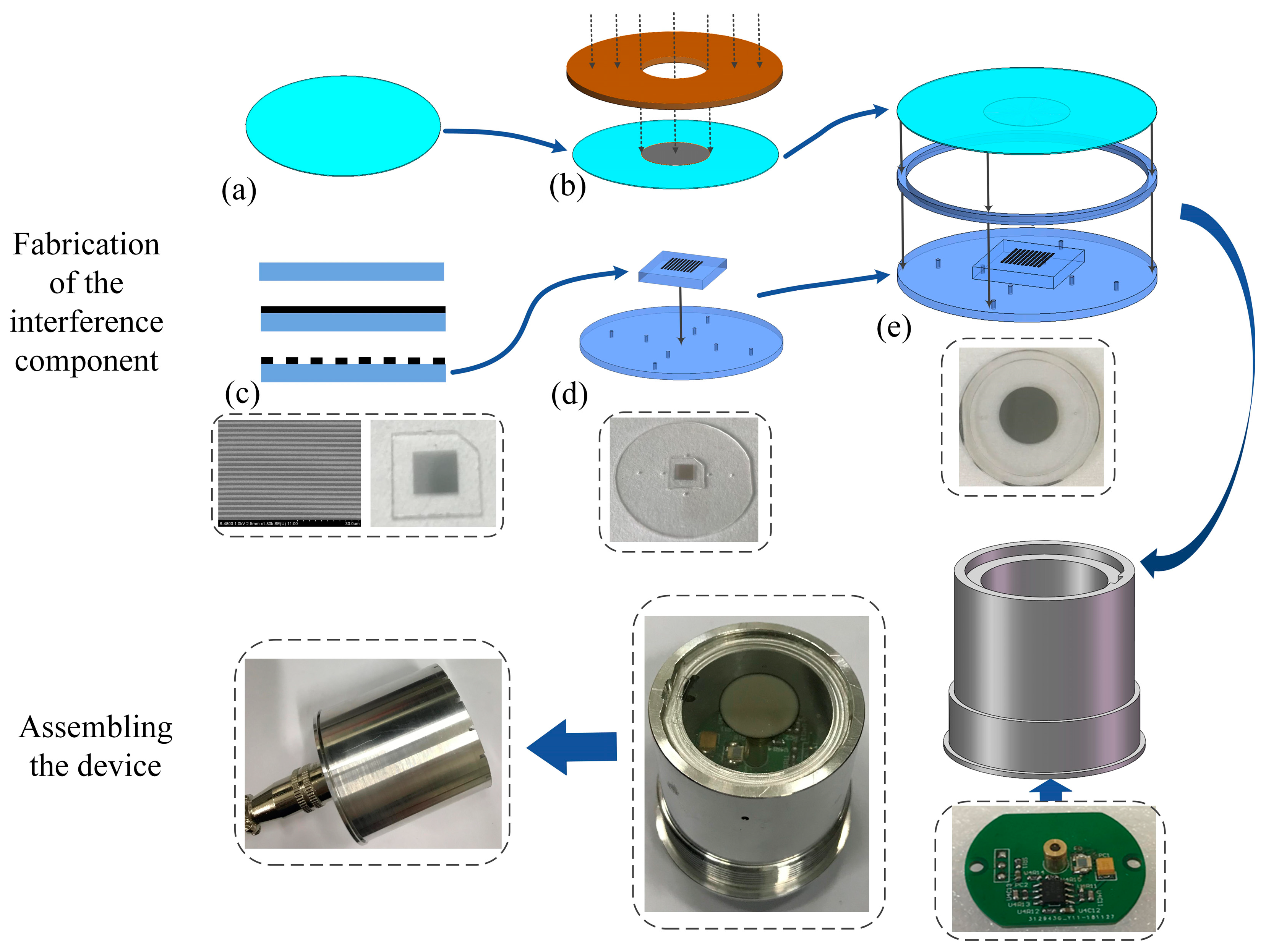
3.2. Fabrication of the Device
- (a)
- The round diaphragm with the designed diameter was cut by a laser process from the thin glass substrate with the designed thickness. The laser process was direct-writing ablation by the focused laser beam with a 355 nm wavelength and 15 W power, and it was implemented by laser engraving equipment. The direction of the laser beam is adjusted according to the control program, focusing the laser spot on the surface of the substrate moved, while removing its material within a certain depth in the scanned area with high temperature. The laser process is mainly applied for cutting structures from the glass substrates in this fabrication process;
- (b)
- The 100 nm thick chromium (Cr) film was sputtered on the center of the diaphragm with a patterned glass plate covering its surface as the mask;
- (c)
- The grating with a 2.4 period was made by the micromachining process flow for preparing high-accuracy metal microstructures on the substrate. First, the 50 nm thick Cr film was sputtered on the glass wafer. Second, a photoresist mask containing a grating fringe pattern was obtained via a lithography process. Third, the Cr film was patterned by high-precision ion beam etching (IBE) processes with the photoresist mask. Finally, discrete square grating plates were cut from the fabricated wafer by the laser process, with the edges parallel or perpendicular to the grating fringe and a missing angle for marking the fringe direction;
- (d)
- The round substrate with the designed positioning edge and air vents were cut from another glass substrate by the laser process. Then, the grating plate was assembled on the center of the substrate by a low-temperature glass bonding process, with one of its edges parallel to the positioning edge of the substrate;
- (e)
- The glass diaphragm with reflective film, a glass ring cut by the laser process as the cavity sidewall, and the substrate with a grating were aligned and assembled by a low-temperature glass bonding process to obtain the glass-based interference component.
4. Results
4.1. The Test Methods
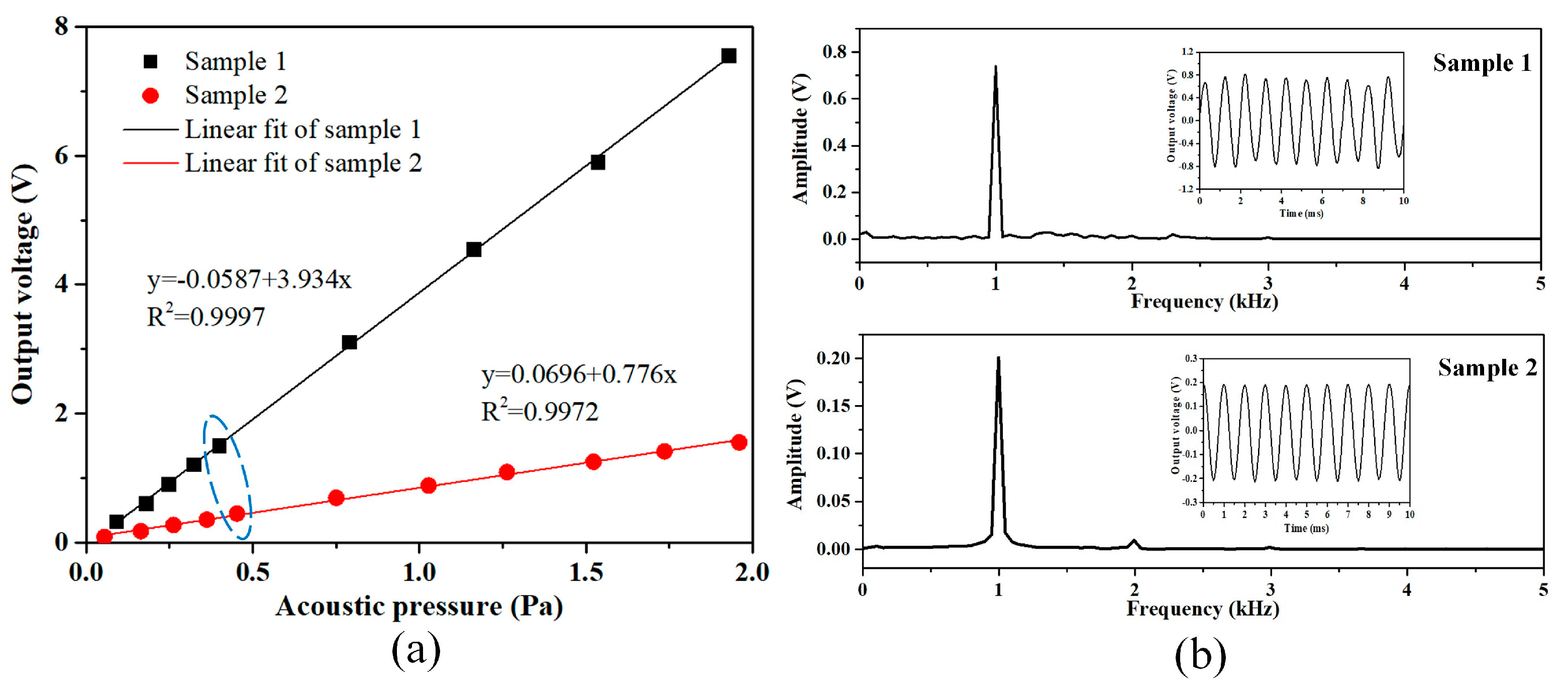
4.2. Response to the Acoustic Pressure
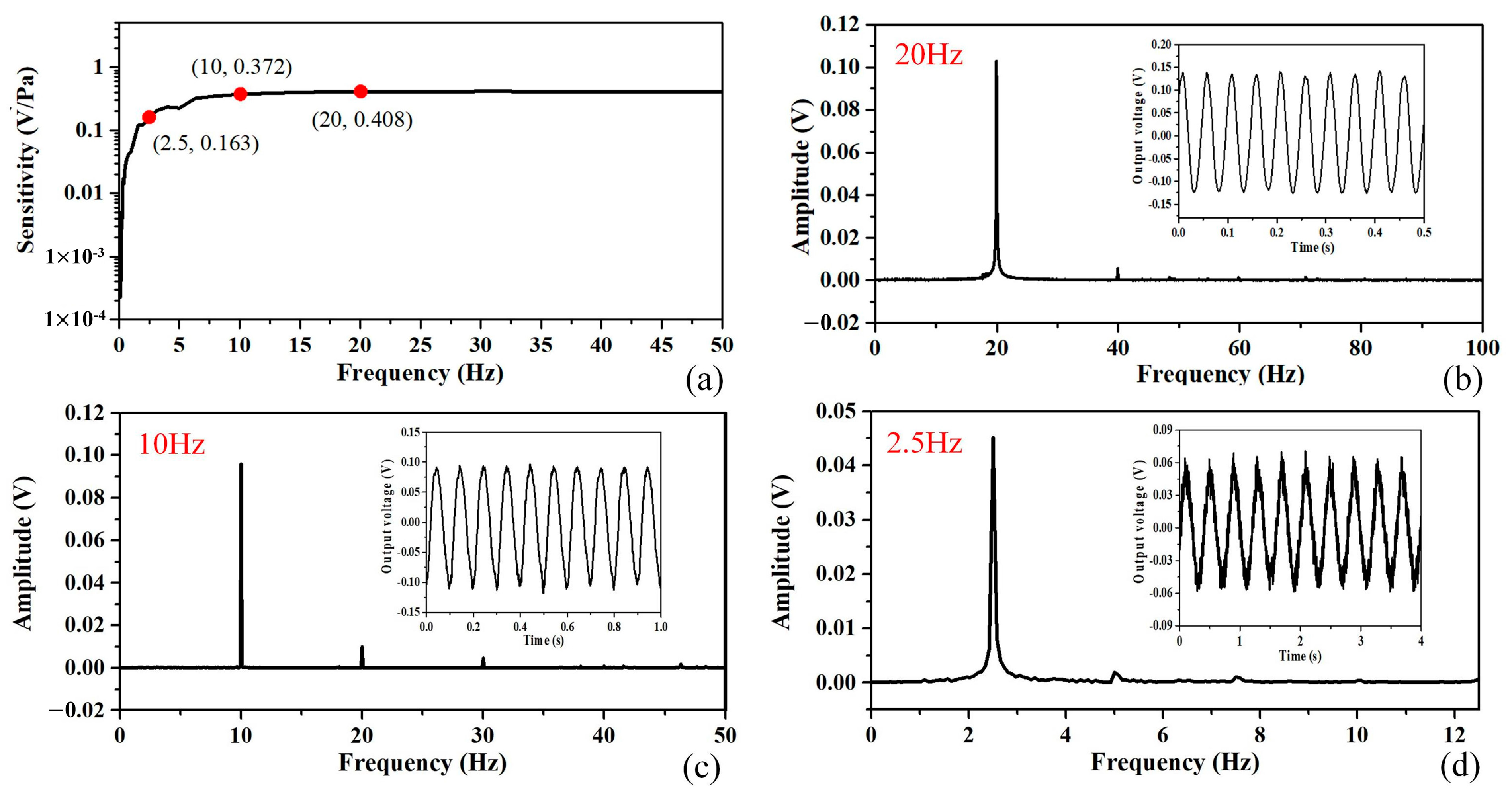
4.3. Low-Frequency Characteristic of the Glass-Based Sensor
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Dong, Y.; Zhang, J.; Zhang, C.; Fu, H.; Li, W.; Luo, W.; Hu, P. Analysis and Design of Fiber Microprobe Displacement Sensors Including Collimated Type and Convergent Type for Ultra-Precision Displacement Measurement. Micromachines 2024, 15, 224. [Google Scholar] [CrossRef]
- Zhao, H.; Li, M.; Zhang, R.; Wang, Z.; Xie, K.; Xin, C.; Jin, L.; Liang, Z. High-precision microdisplacemant sensor based on zeroth-order diffraction. Appl. Opt. 2020, 59, 16–21. [Google Scholar] [CrossRef]
- Wu, L.; Zheng, Y.; Xue, C.; Bai, J.; Chen, J. An Optical Acoustic Detection System Based on Fabry Pérot Etalon Stability Structure. Micromachines 2021, 12, 1564. [Google Scholar] [CrossRef]
- Liu, B.; Zhou, H.; Liu, L. An optical fiber Fabry–Perot microphone based on corrugated silver diaphragm. IEEE Trans. Instrum. Meas. 2018, 67, 1994–2000. [Google Scholar] [CrossRef]
- Li, C.; Yang, B.; Zheng, X.; Sun, Z.; Zhou, L.; Huang, X.; Guo, X. An optical interferometry based MEMS accelerometer applicable to seismic-grade measurement. IEEE Trans. Instrum. Meas. 2022, 71, 7503810. [Google Scholar] [CrossRef]
- Gao, S.; Zhou, Z.; Bi, X.; Feng, L. A Low cross-axis sensitivity micro-grating accelerometer with double-layer cantilever beams. IEEE Sens. J. 2021, 21, 16503–16509. [Google Scholar] [CrossRef]
- Bonilla-Manrique, O.E.; Posada-Roman, J.E.; Garcia-Souto, J.A.; Ruiz-Llata, M. Sub-ppm-level ammonia detection using photoacoustic spectroscopy with an optical microphone based on a phase interferometer. Sensors 2019, 19, 2890. [Google Scholar] [CrossRef]
- Ren, D.; Liu, X.; Zhang, M.; Gao, R.; Qi, Z. Low-frequency bi-directional microphone based on a combination of bionic MEMS diaphragm and fiber acousto-optic transducer. IEEE Sens. J. 2021, 21, 14655. [Google Scholar] [CrossRef]
- Zhang, M.; Wu, G.; Ren, D.; Gao, R.; Qi, Z.; Liang, X. An optical MEMS acoustic sensor based on grating interferometer. Sensors 2019, 19, 1503. [Google Scholar] [CrossRef]
- Zhang, Y.; Gao, S.; Xiong, H.; Feng, L. Optical sensitivity enhancement in grating based micromechanical accelerometer by reducing non-parallelism error. Opt. Express 2019, 27, 6565–6579. [Google Scholar] [CrossRef]
- Qi, X.; Wang, S.; Jiang, J.; Liu, K.; Zhang, P.; Li, R.; Liu, T. Flywheel-like diaphragm-based fiber-optic Fabry–Perot frequency tailored acoustic sensor. J. Phys. D Appl. Phys. 2020, 53, 415102. [Google Scholar] [CrossRef]
- Hayber, S.E.; Tabaru, T.E.; Saracoglu, O.G. A novel approach based on simulation of tunable MEMS diaphragm for extrinsic Fabry–Perot sensors. Opt. Commun. 2019, 430, 14–23. [Google Scholar] [CrossRef]
- Lu, X.; Wu, Y.; Gong, Y.; Rao, Y. A miniature Fiber-Optic microphone based on an annular corrugated MEMS diaphragm. J. Light. Technol. 2018, 36, 5224–5229. [Google Scholar] [CrossRef]
- Lee, W.; Hall, N.A.; Degertekin, F.L. A grating-assisted resonant-cavity-enhanced optical displacement detection method for micromachined sensors. Appl. Phys. Lett. 2004, 85, 3032–3034. [Google Scholar] [CrossRef]
- Hall, N.A.; Okandan, M.; Littrell, R.; Bicen, B.; Degertekin, F.L. Micromachined optical microphone structures with low thermal-mechanical noise levels. J. Acoust. Soc. Am. 2007, 122, 2031–2037. [Google Scholar] [CrossRef]
- Kim, D.; Garcia, C.T.; Avenson, B.; Hall, N.A. Design and Experimental Evaluation of a Low-Noise Backplate for a Grating-Based Optical Interferometric Sensor. J. Microelectromech. Syst. 2014, 23, 1101–1111. [Google Scholar] [CrossRef]
- Zawawi, S.A.; Hamzah, A.A.; Majlis, B.Y.; Mohd-Yasin, F. The Fabrication and Indentation of Cubic Silicon Carbide Diaphragm for Acoustic Sensing. Micromachines 2021, 12, 1101. [Google Scholar] [CrossRef]
- Wang, J.; Yuan, W.; Ma, Z.; Guo, T. High-sensitivity photonic crystal diaphragm based sapphire Fabry-Perot acoustic sensor for high-temperature applications. In Proceedings of the IEEE SENSORS, Rotterdam, The Netherlands, 25–28 October 2020; p. 1564. [Google Scholar]
- Williams, R.P.; Hord, S.K.; Hall, N.A. Optically read displacement detection using phase-modulated diffraction gratings with reduced zeroth-order reflections. Appl. Phys. Lett. 2017, 110, 151104. [Google Scholar] [CrossRef]
- Hall, N.A.; Lee, W.; Degertekin, F.L. Capacitive micromachined ultrasonic transducers with diffraction-based integrated optical displacement detection. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2003, 50, 1570–1580. [Google Scholar] [CrossRef]
- Hu, X.; Yue, Y.; Cai, C.; Qi, Z. Temperature-robust optical microphone with a compact grating interferometric module. Appl. Opt. 2023, 62, 6072–6080. [Google Scholar] [CrossRef]
- Bicen, B.; Jolly, S.; Jeelani, K.; Garcia, C.T.; Hall, N.A.; Degertekin, F.L.; Su, Q.; Cui, W.; Miles, R.N. Integrated Optical Displacement Detection and Electrostatic Actuation for Directional Optical Microphones With Micromachined Biomimetic Diaphragms. IEEE Sens. J. 2009, 9, 1933–1941. [Google Scholar] [CrossRef]
- Qiu, H.; Min, F.; Yang, Y.; Ran, Z.; Duan, J. Hypersonic Aerodynamic Force Balance Using Micromachined All-Fiber Fabry–Pérot Interferometric Strain Gauges. Micromachines 2019, 10, 316. [Google Scholar] [CrossRef] [PubMed]
- Akkaya, O.; Kilic, O.; Digonnet, M.J.F.; Kino, G.S.; Solgaard, O. Modeling and Demonstration of Thermally Stable High-Sensitivity Reproducible Acoustic Sensors. J. Microelectromechanical Syst. 2012, 21, 1347–1356. [Google Scholar] [CrossRef]
- Zhang, M.; Ma, Z.; Gao, R.; Qi, Z.; Liang, X. A grating interferometer based high-sensitivity acoustic sensor packaged with optoelectronic readout module. In Proceedings of the Optical Sensors and Sensing Congress (ES, FTS, HISE, Sensors), OSA Technical Digest (Optical Society of America, 2019), San Jose, CA, USA, 25–27 June 2019. [Google Scholar]
- Giovanni, M.D. Flat and Corrugated Diaphragm Design Handbook; CRC Press Taylor & Francis Group: New York, NY, USA, 1982. [Google Scholar]
- Wang, X.; Li, B.; Russo, O.L.; Roman, H.T.; Chin, K.K.; Farmer, K.R. Diaphragm design guidelines and an optical pressure sensor based on MEMS technique. Microelectron. J. 2006, 37, 50–56. [Google Scholar] [CrossRef]
- Langlois, W.E. Isothermal squeeze films. Quart. Appl. Math. 1962, 20, 131–150. [Google Scholar] [CrossRef]
- Bao, M.; Yang, H. Squeeze film air damping in MEMS. Sens. Actuators A 2007, 136, 3–27. [Google Scholar] [CrossRef]
- Li, Y.; Zuo, M.; Tao, J. An SOI-MEMS acoustic sensor based on optical grating interferometer. IEEE Sens. J. 2023, 23, 4757–4762. [Google Scholar] [CrossRef]
- Kim, D.; Hall, N.A. Towards a sub 15-dBA optical micromachined microphone. J. Acoust. Soc. Am. 2014, 135, 2664–2673. [Google Scholar] [CrossRef]
- Wu, G.; Hu, X.; Liu, X.; Dong, Z.; Yue, Y.; Cai, C.; Qi, Z. Fabrication of glass diaphragm based Fiber-Optic microphone for sensitive detection of airborne and waterborne sounds. Sensors 2022, 22, 2218. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mechanism | Parameter | Expression | Effect |
|---|---|---|---|
| Deformation | Proportional to displacement | ||
| Proportional to displacement | |||
| Light dispersion | Proportional to reduction in interference intensity variation | ||
| Squeeze film damping | Proportional to elastic damping | ||
| Proportional to viscous damping |
| Parameter | Expression | Sample 1 | Sample 2 | Silicon-Based Sample [9] |
|---|---|---|---|---|
| Diaphragm radius | 6.35 mm | 12.7 mm | 3 mm | |
| Diaphragm thickness | ||||
| Cavity length a | ||||
| Incident light radius | 0.5 mm | 0.5 mm | 0.5 mm | |
| Elastic coefficient for deformation | 2.93 × 107 | 4.95 × 107 | 2.99 × 105 | |
| Parameter for incident light | 0.0062 | 0.0016 | 0.028 | |
| Damping coefficients b ) | 4.73 × 104 | 7.6 × 105 | 8.58 × 108 | |
| 6.78 | 270.29 | 32,757 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, M.; Lu, C.; Zhao, Q.; Qi, Z.-M. Development of a High-Sensitivity Acoustic Sensor Based on Grating Interferometer Combined with Glass Diaphragm. Micromachines 2024, 15, 1097. https://doi.org/10.3390/mi15091097
Zhang M, Lu C, Zhao Q, Qi Z-M. Development of a High-Sensitivity Acoustic Sensor Based on Grating Interferometer Combined with Glass Diaphragm. Micromachines. 2024; 15(9):1097. https://doi.org/10.3390/mi15091097
Chicago/Turabian StyleZhang, Mengying, Chao Lu, Quanliang Zhao, and Zhi-Mei Qi. 2024. "Development of a High-Sensitivity Acoustic Sensor Based on Grating Interferometer Combined with Glass Diaphragm" Micromachines 15, no. 9: 1097. https://doi.org/10.3390/mi15091097