
Theoretical Simulation of Output Characteristics of an RTD-Fluxgate Sensor Under Sawtooth Wave Excitation

Abstract
:1. Introduction
2. The Research on the Output Model of the RTD-Fluxgate Sensor
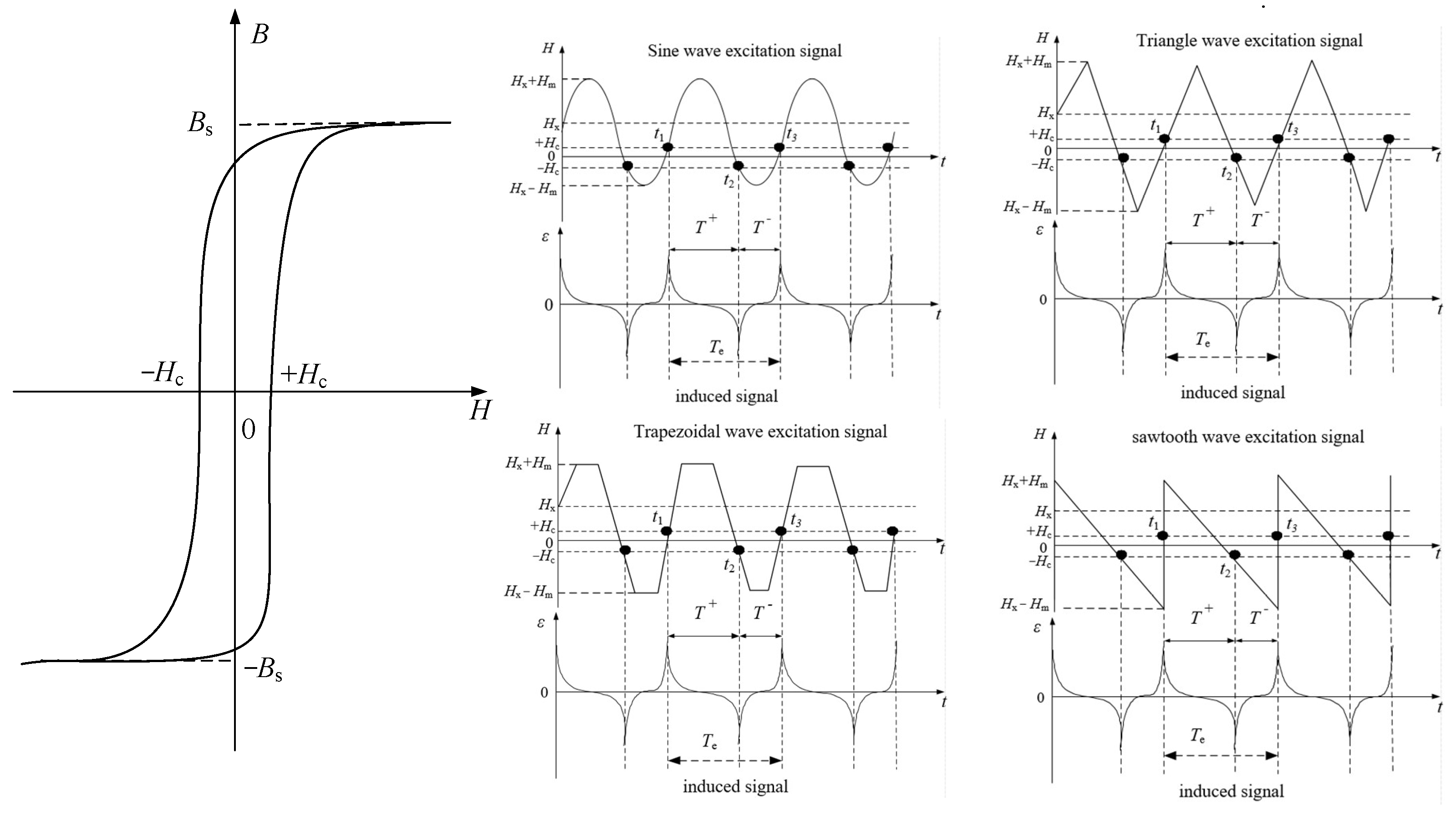
2.1. The Working Principle of the RTD-Fluxgate Sensor
2.2. Output Model Under Sine Wave Excitation
2.3. Output Model Under Triangular Wave Excitation
2.4. Output Model Under Trapezoidal Wave Excitation
2.5. Output Model Under Sawtooth Wave Excitation
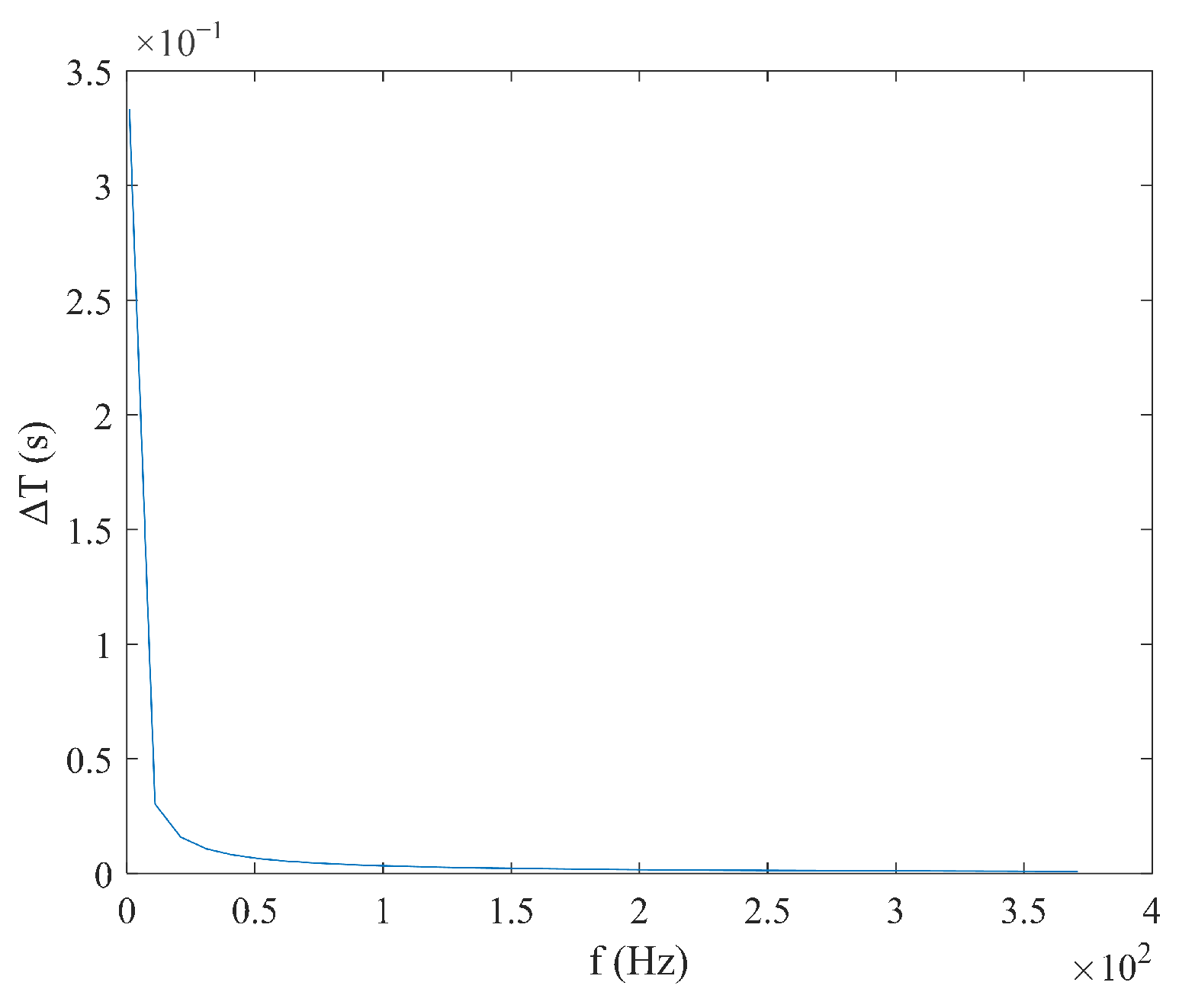
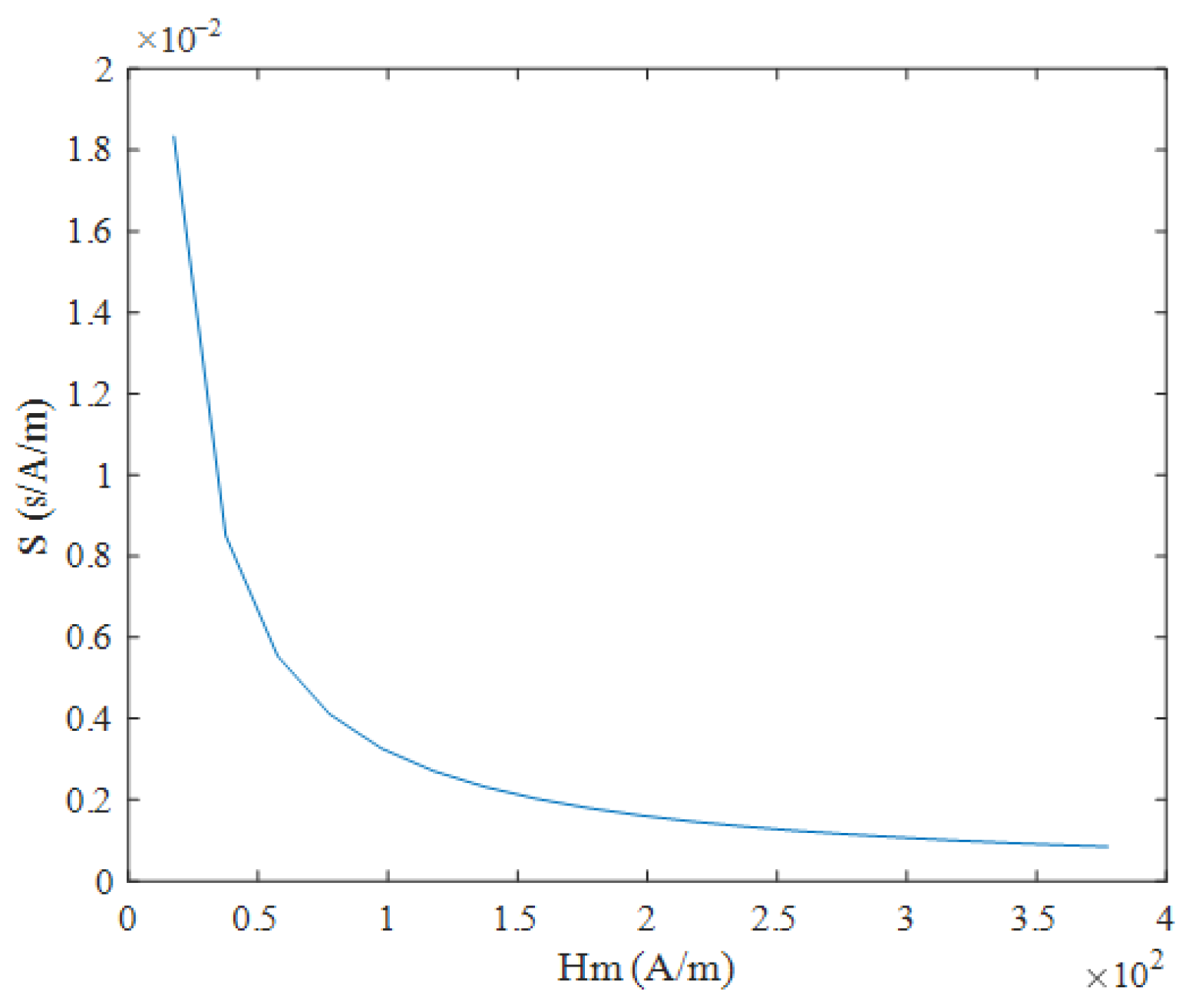
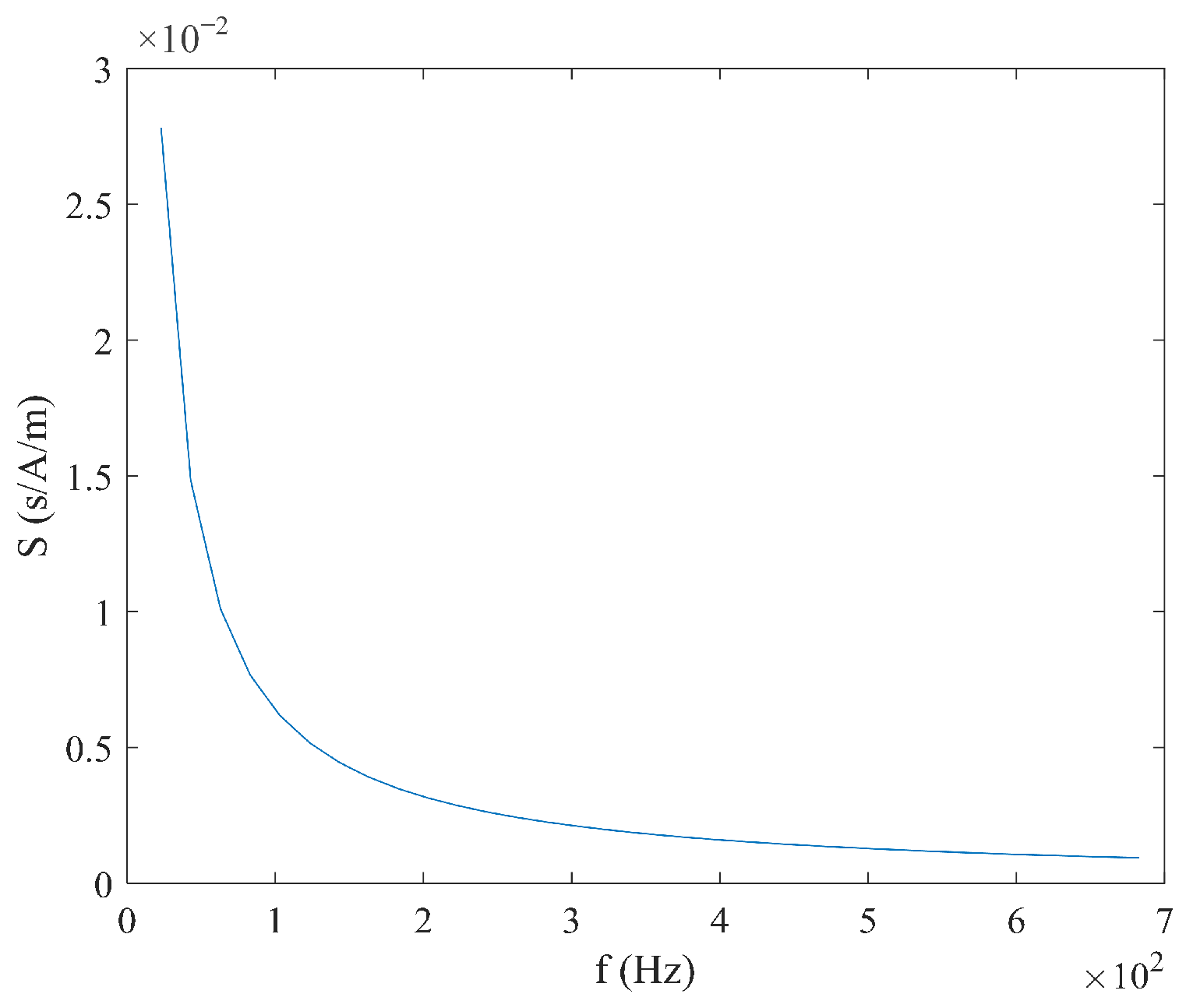
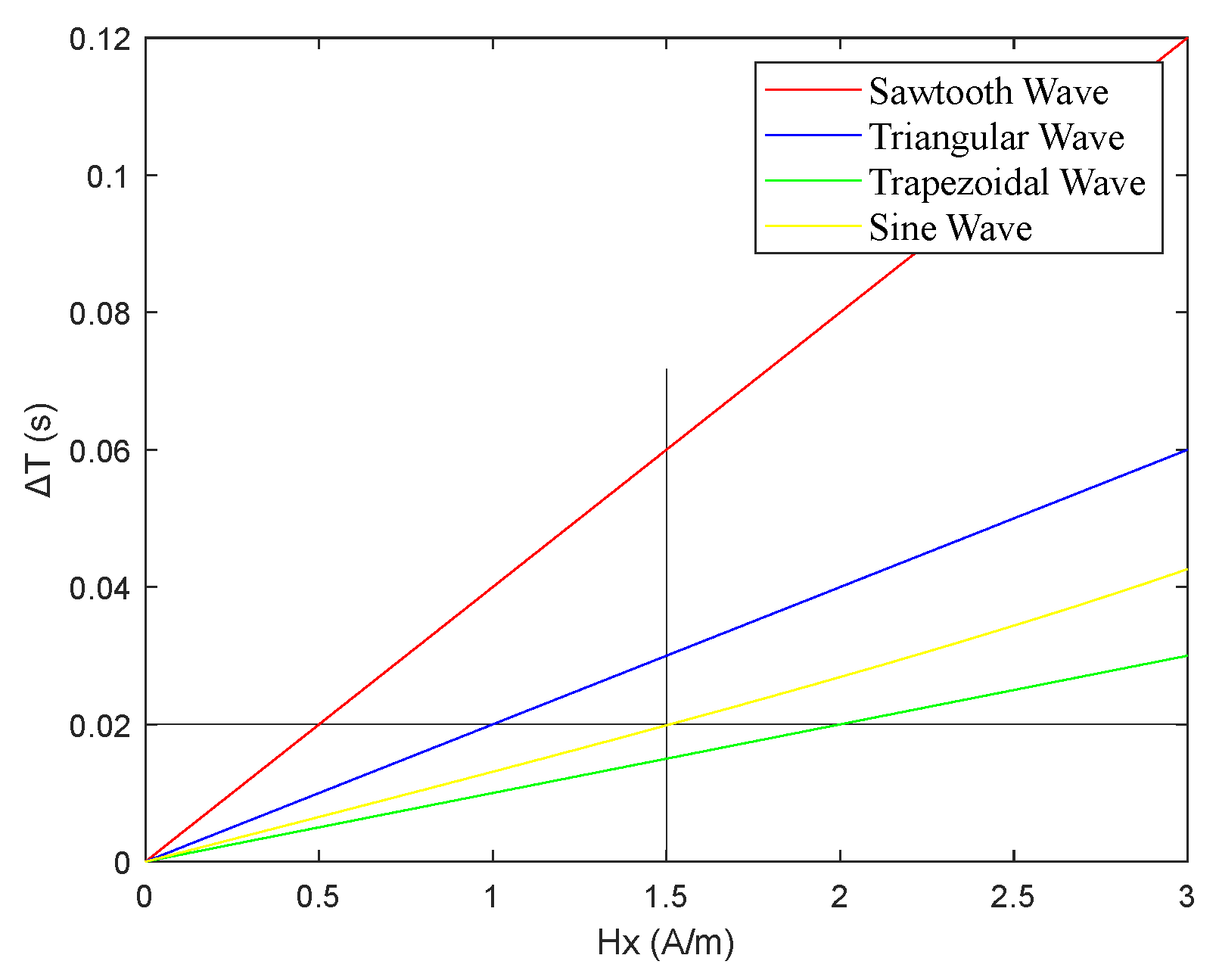
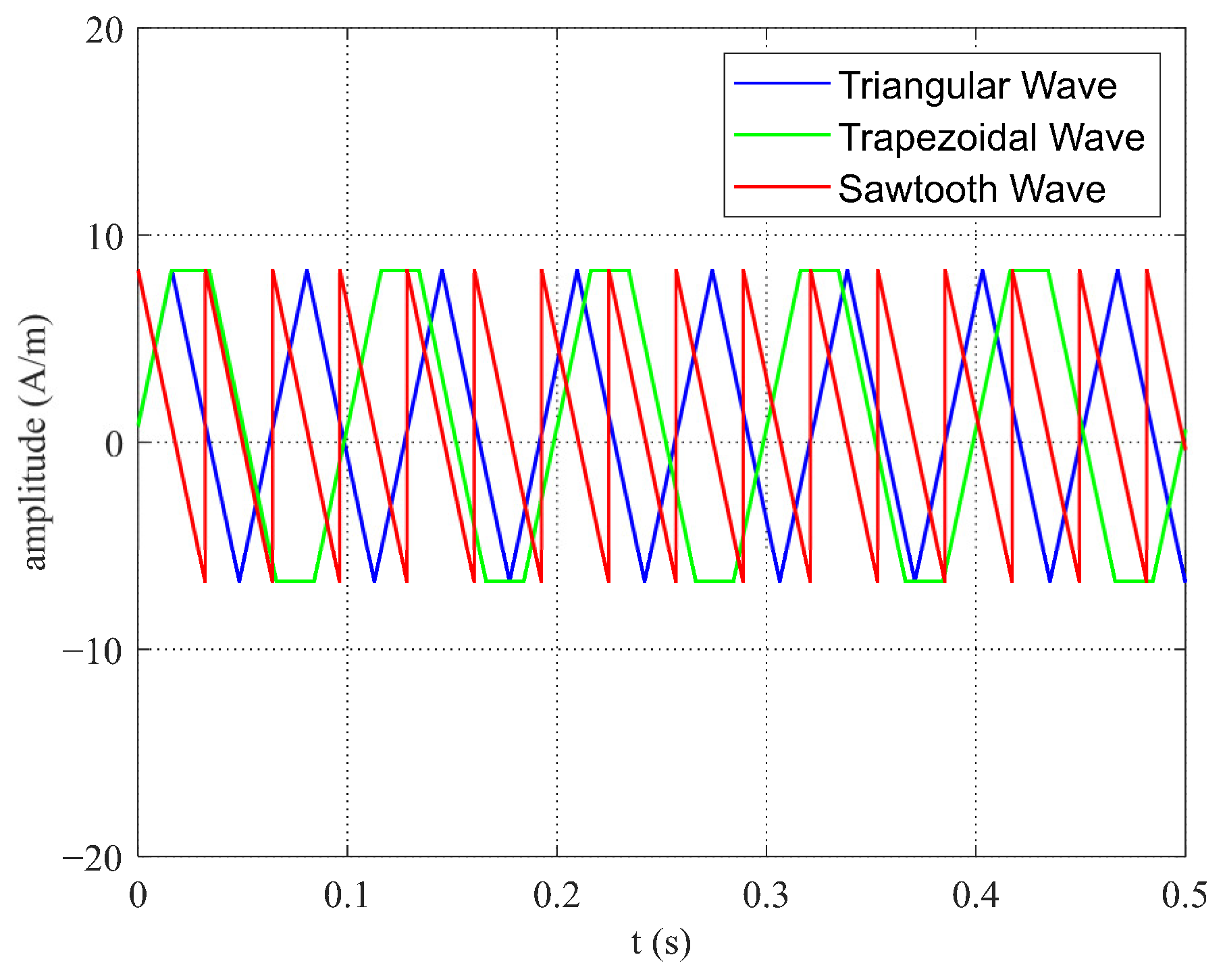
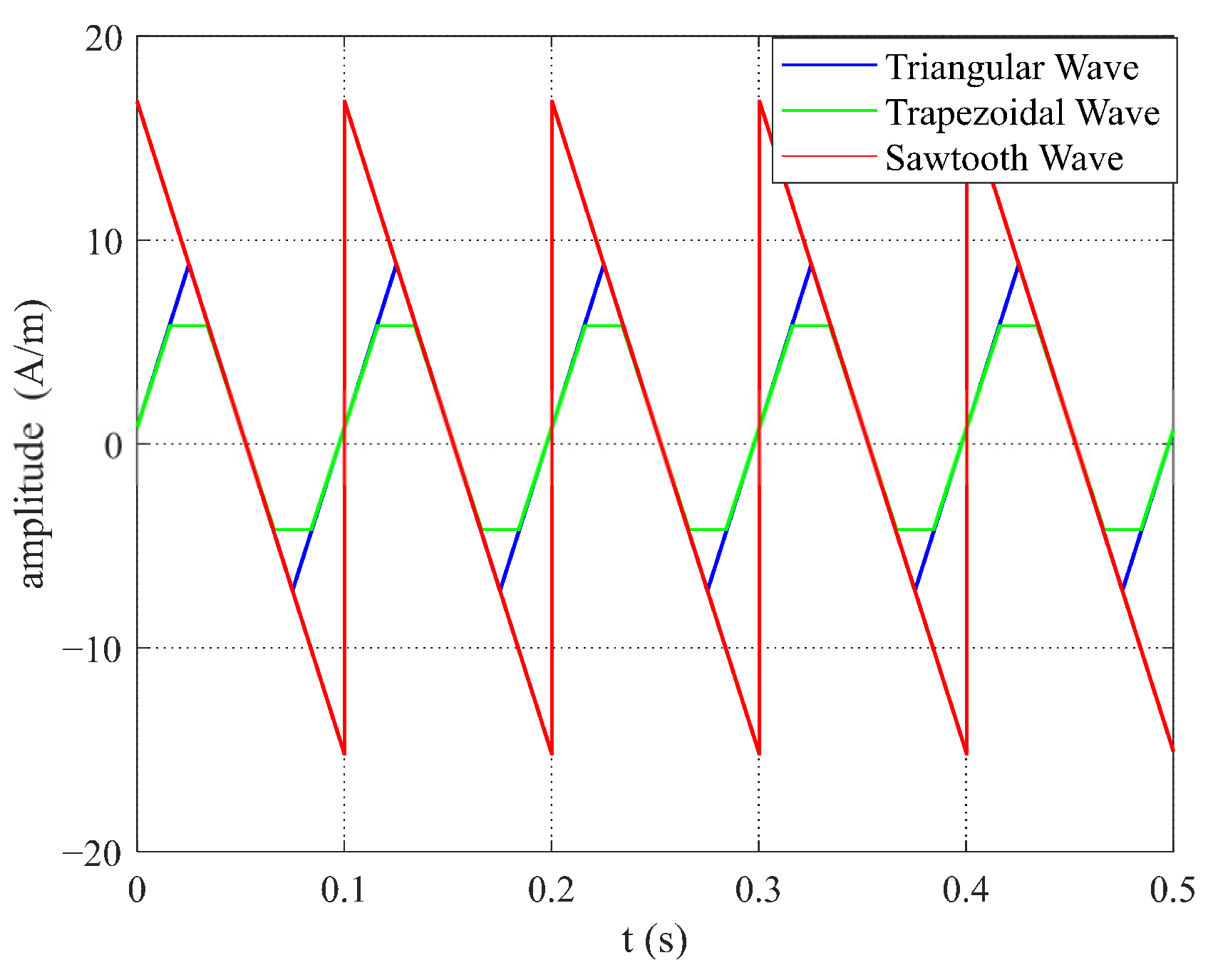
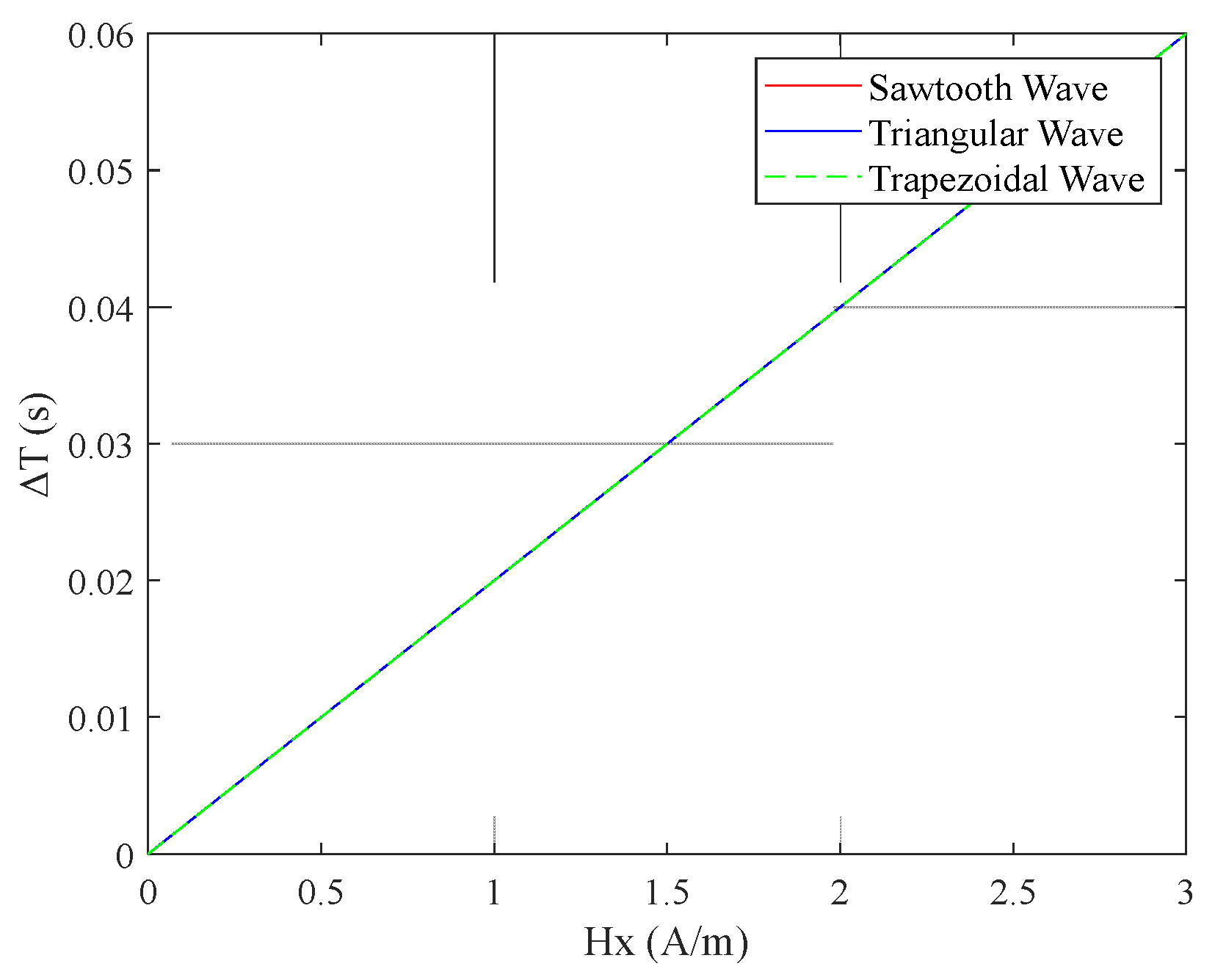
3. Simulation Results Analysis
4. Conclusions and Discussion
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liu, S.; Hu, X.Y.; Guo, N.; Cai, H.; Zhang, H.; Li, Y. Overview of UAV Aeromagnetic Measurement Technology. Geomat. Inf. Sci. Wuhan Univ. 2023, 48, 823–840. [Google Scholar]
- Qiao, Z.K.; Ma, G.Q.; Zhou, W.N.; Yu, P.; Zhou, S.; Wang, T.; Tang, S.; Dai, W.; Meng, Z.; Zhang, Z. Comprehensive Error Compensation for Multirotor UAV Aeromagnetic Systems. Acta Geophys. 2020, 63, 4604–4612. [Google Scholar]
- Li, Z.P.; Gao, S.; Wang, X.B. Research on Aeromagnetic Measurements by Rotorcraft UAVs in Special Areas. Chin. J. Geophys. 2018, 61, 3825–3834. [Google Scholar]
- Li, J.; Zhang, X.; Shi, J.; Heidari, H.; Wang, Y. Performance Degradation Effect Countermeasures in Residence Times Difference (RTD) Fluxgate Magnetic Sensors. IEEE Sens. J. 2019, 19, 11819–11827. [Google Scholar]
- Yang, B. Theoretical Modeling and Experimental Research on Time-Difference Fluxgate Sensors. Ph.D. Thesis, Nanjing University of Science and Technology, Nanjing, China, 2015. [Google Scholar]
- Andò, B.; Baglio, S.; La Malfa, S.; Trigona, C.; Bulsara, A.R. Experimental Investigations on the Spatial Resolution in RTD-Fluxgates. In Proceedings of the 2009 IEEE Instrumentation and Measurement Technology Conference, Singapore, 5–7 May 2009; pp. 1542–1545. [Google Scholar]
- Andò, B.; Baglio, S.; Sacco, V.; Bulsara, A.R.; In, V. PCB Fluxgate Magnetometers with a Residence Times Difference Readout Strategy: The Effects of Noise. IEEE Trans. Instrum. Meas. 2008, 57, 19–24. [Google Scholar] [CrossRef]
- Nikitin, A.; Stocks, N.G.; Bulsara, A.R. Bistable Sensors Based on Broken Symmetry Phenomena: The Residence Time Difference vs. the Second Harmonic Method. Eur. Phys. J. Spec. Top. 2013, 222, 2583–2593. [Google Scholar] [CrossRef]
- Andò, B.; Ascia, A.; Baglio, S.; Bulsara, A.R.; Neff, J.D.; In, V. Towards an Optimal Readout of a Residence Times Difference (RTD) Fluxgate Magnetometer. Sens. Actuators A Phys. 2008, 142, 73–79. [Google Scholar]
- Andò, B.; Baglio, S.; Bulsara, A.R.; Sacco, V. RTD Fluxgate: A Low-Power Nonlinear Device to Sense Weak Magnetic Fields. IEEE Instrum. Meas. Mag. 2005, 8, 64–73. [Google Scholar] [CrossRef]
- Bulsara, A.R.; Seberino, C.; Gammaitoni, L.; Karlsson, M.F.; Lundqvist, B.; Robinson, J.W.C. Signal Detection via Residence-Time Asymmetry in Noisy Bistable Devices. Phys. Rev. E 2003, 67, 016120. [Google Scholar] [CrossRef] [PubMed]
- Andò, B.; Baglio, S.; Bulsara, A.R.; Sacco, V. “Residence Times Difference” Fluxgate Magnetometers. IEEE Sens. J. 2005, 5, 895–904. [Google Scholar]
- Lu, H. Research on Residence Time Difference Fluxgate Sensors. Ph.D. Thesis, Jilin University, Changchun, China, 2012. [Google Scholar]
- Pang, N. Research on Low-Noise Techniques for Residence Time Difference Fluxgate Sensors. Ph.D. Thesis, Jilin University, Changchun, China, 2018. [Google Scholar]
- Pang, N. Simulation Model Research of RTD-Type Fluxgate Sensors. Digit. Technol. Appl. 2018, 36, 103–104. [Google Scholar]
- Ferro, C.; Andò, B.; Trigona, C.; Bulsara, A.R.; Baglio, S. Residence Time Difference Fluxgate Magnetometer in “Horseshoe-Coupled” Configuration. IEEE Open J. Instrum. Meas. 2023, 2, 9500111. [Google Scholar] [CrossRef]
- Chen, S.Y. Performance Improvement of Residence Time Difference Fluxgate Sensors Based on Dynamic Hysteresis Model. Ph.D. Thesis, Jilin University, Changchun, China, 2019. [Google Scholar]
- Ferro, C.; Graziani, S.; Mirabella, S.; Trigona, C.; Tuccitto, N.; Urso, M.; Bulsara, A.R.; Baglio, S. Implementing the RTD Fluxgate Magnetometer for Measurements of Kinematic Viscosity. In Proceedings of the IEEE Sensors Applications Symposium (SAS), Naples, Italy, 23–25 July 2024; pp. 1–5. [Google Scholar]
- Liu, S.B.; Sun, X.Y.; Liu, S.W. Signal Detection Method for Hysteresis Time-Difference Fluxgate Sensors. Chinese Patent CN201310217695.4, 13 April 2016. [Google Scholar]
- Chen, S.; Wang, Y.; Li, J.; Piao, H.; Lin, J. Sensitivity Model for Residence Times Difference Fluxgate Magnetometers Near Zero Magnetic Field. IEEE Sens. J. 2020, 20, 868–875. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| T+ | T− | ||
|---|---|---|---|
| Triangular Wave | 0.0356 | 0.0289 | 0.0067 |
| Trapezoidal Wave | 0.0534 | 0.0467 | 0.0067 |
| Sawtooth Wave | 0.0199 | 0.0122 | 0.0077 |
| T+ | T− | ||
|---|---|---|---|
| Triangular Wave | 0.055 | 0.0451 | 0.0099 |
| Trapezoidal Wave | 0.0551 | 0.0445 | 0.0101 |
| Sawtooth Wave | 0.0558 | 0.0443 | 0.0115 |
| T+ | T− | ||
|---|---|---|---|
| Triangular Wave | 0.058 | 0.0421 | 0.0159 |
| Trapezoidal Wave | 0.0551 | 0.045 | 0.0101 |
| Sawtooth Wave | 0.068 | 0.0321 | 0.0359 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, H.; Pang, N.; Hu, X.; Wang, R.; Li, G.; Li, F. Theoretical Simulation of Output Characteristics of an RTD-Fluxgate Sensor Under Sawtooth Wave Excitation. Micromachines 2025, 16, 388. https://doi.org/10.3390/mi16040388
Guo H, Pang N, Hu X, Wang R, Li G, Li F. Theoretical Simulation of Output Characteristics of an RTD-Fluxgate Sensor Under Sawtooth Wave Excitation. Micromachines. 2025; 16(4):388. https://doi.org/10.3390/mi16040388
Chicago/Turabian StyleGuo, Haibo, Na Pang, Xu Hu, Rui Wang, Guo Li, and Fei Li. 2025. "Theoretical Simulation of Output Characteristics of an RTD-Fluxgate Sensor Under Sawtooth Wave Excitation" Micromachines 16, no. 4: 388. https://doi.org/10.3390/mi16040388
APA StyleGuo, H., Pang, N., Hu, X., Wang, R., Li, G., & Li, F. (2025). Theoretical Simulation of Output Characteristics of an RTD-Fluxgate Sensor Under Sawtooth Wave Excitation. Micromachines, 16(4), 388. https://doi.org/10.3390/mi16040388