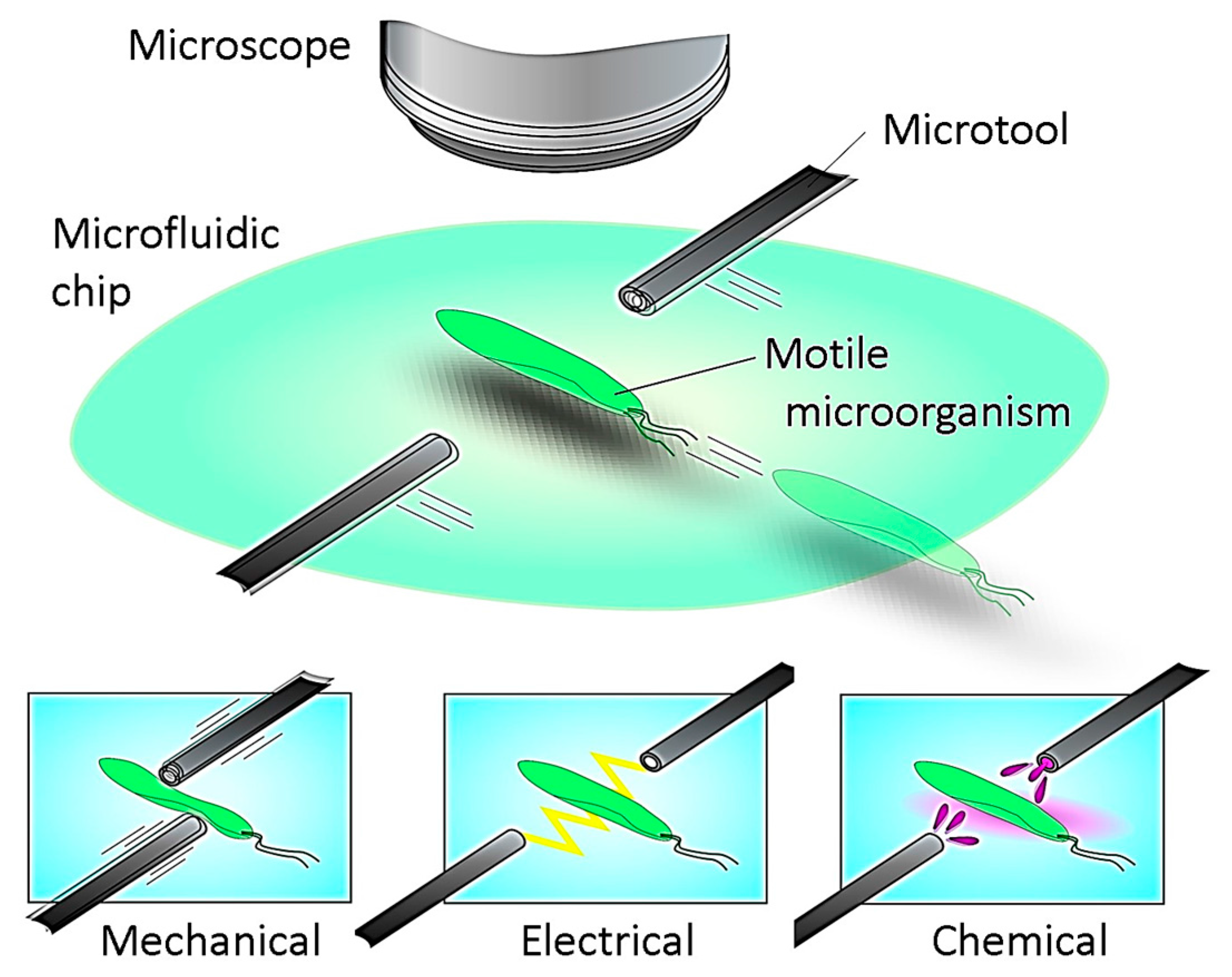
Microrobotic Platform for Single Motile Microorganism Investigation


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Microrobotic Platform
2.1. Required Specifications
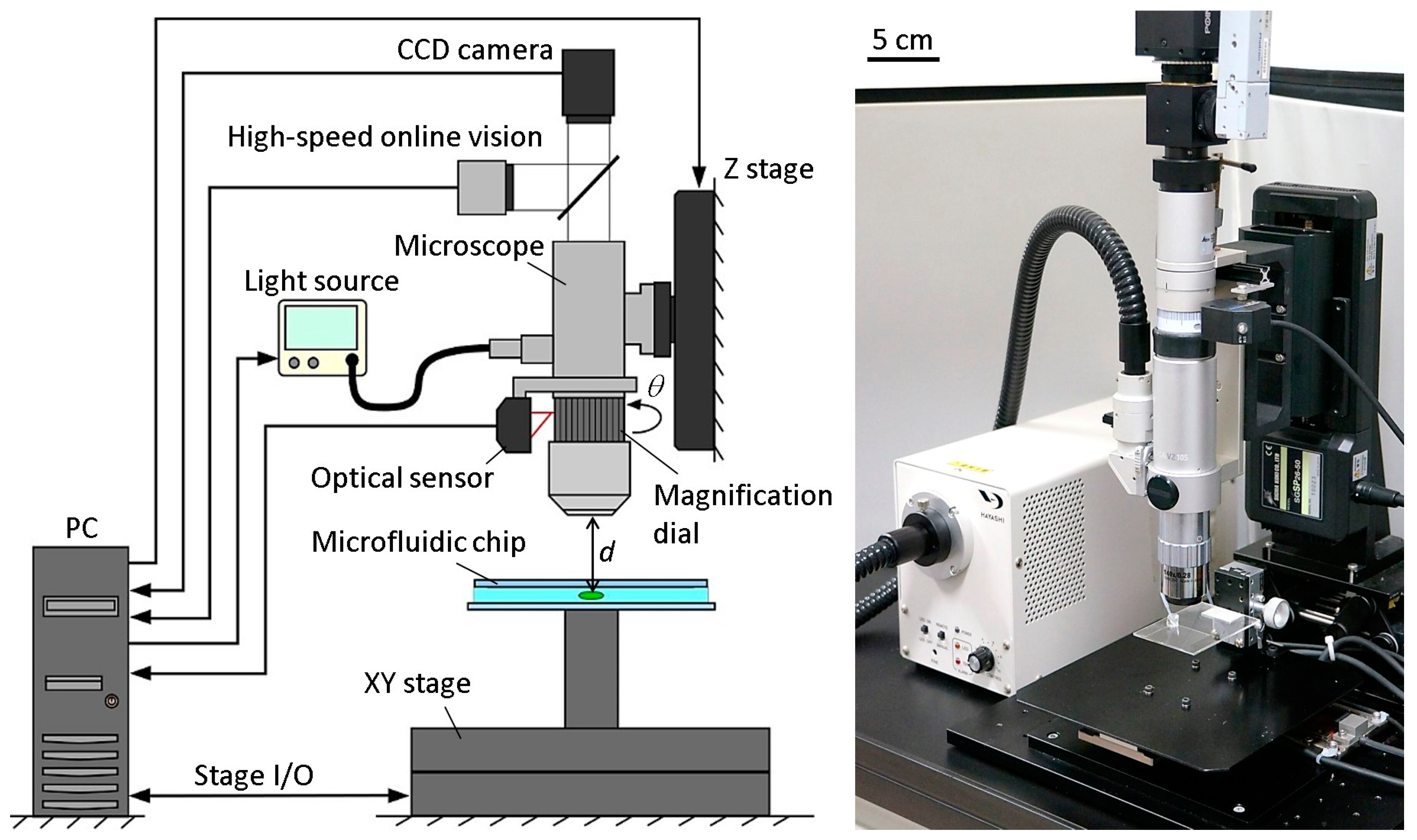
2.2. System Components
2.3. Magnification Ratio Control of Microscope
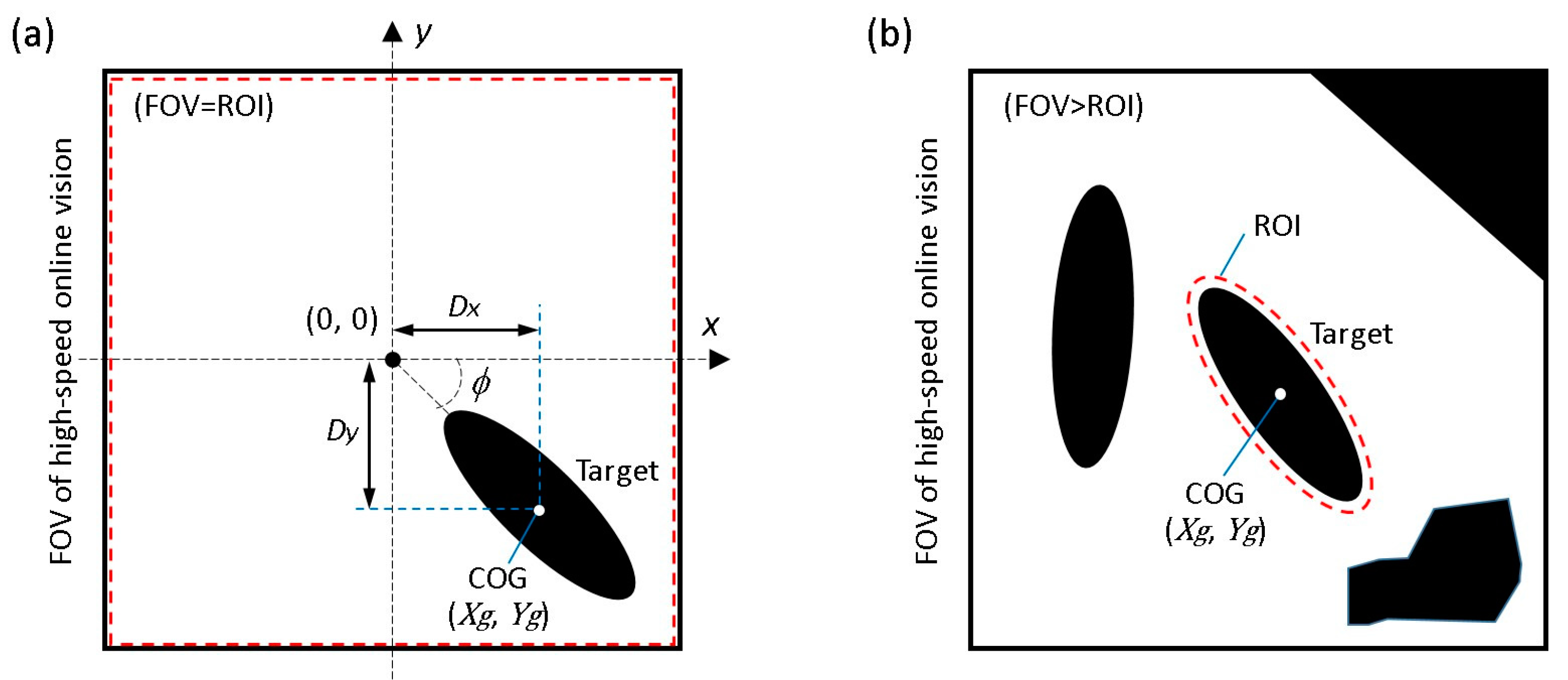
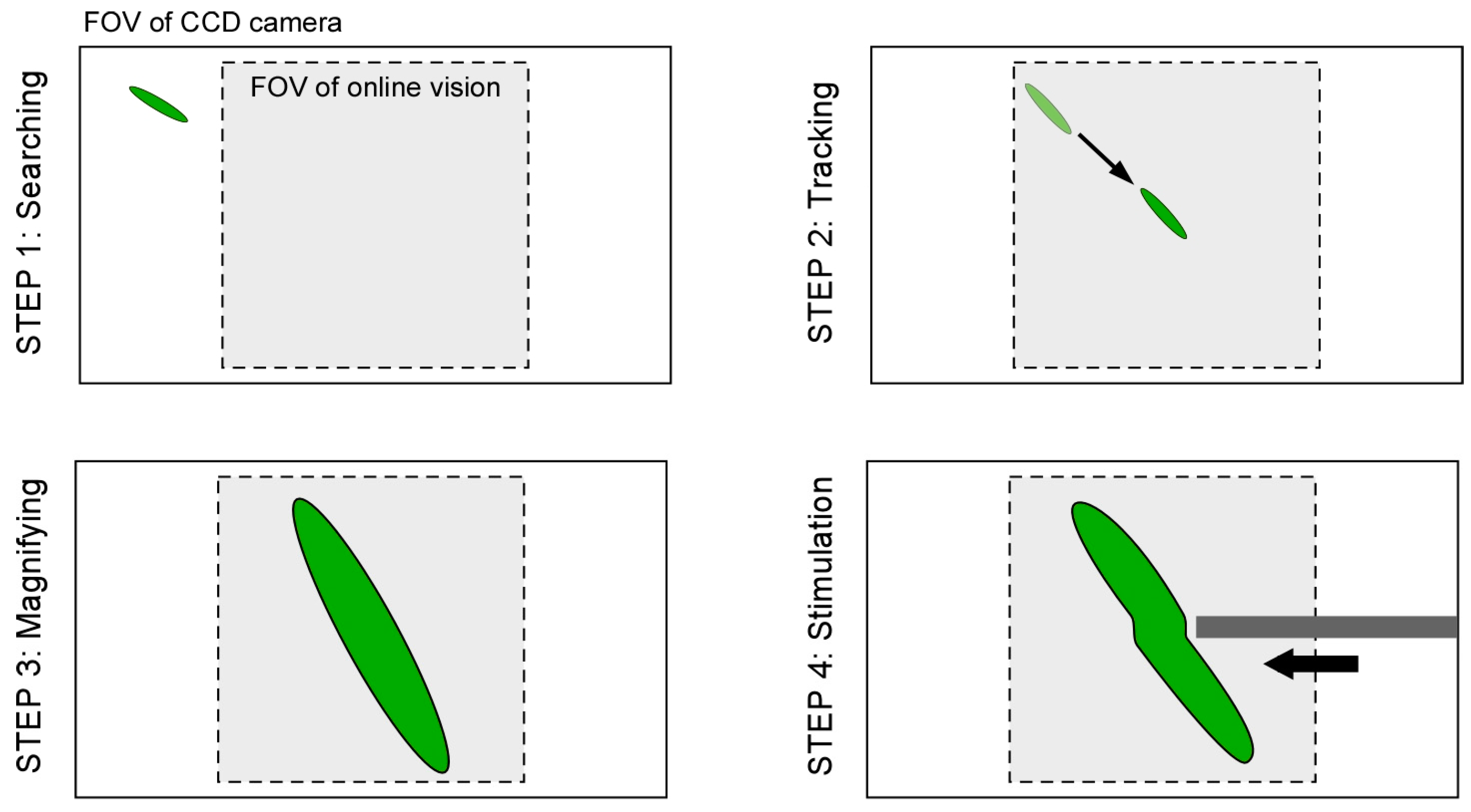
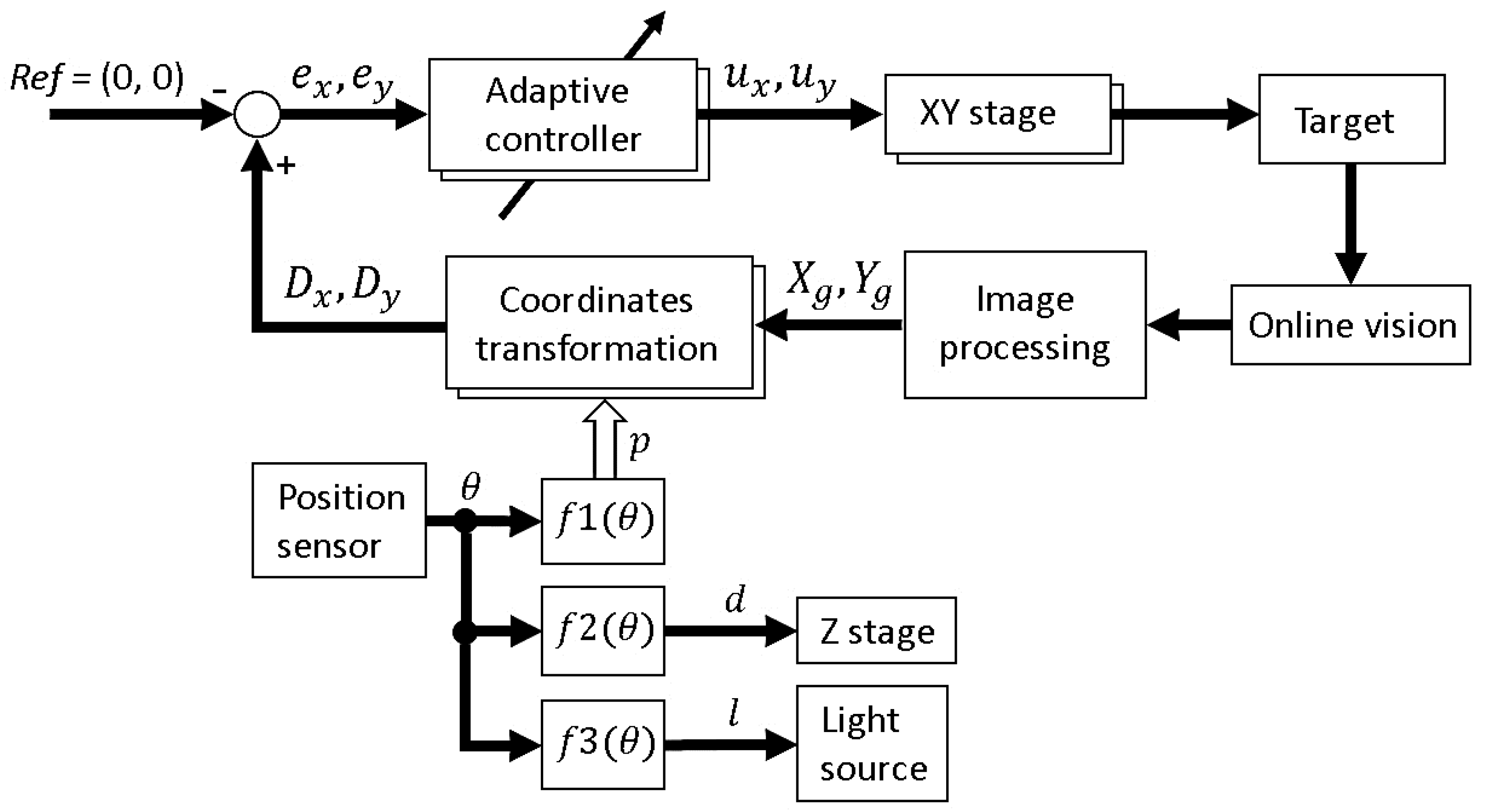
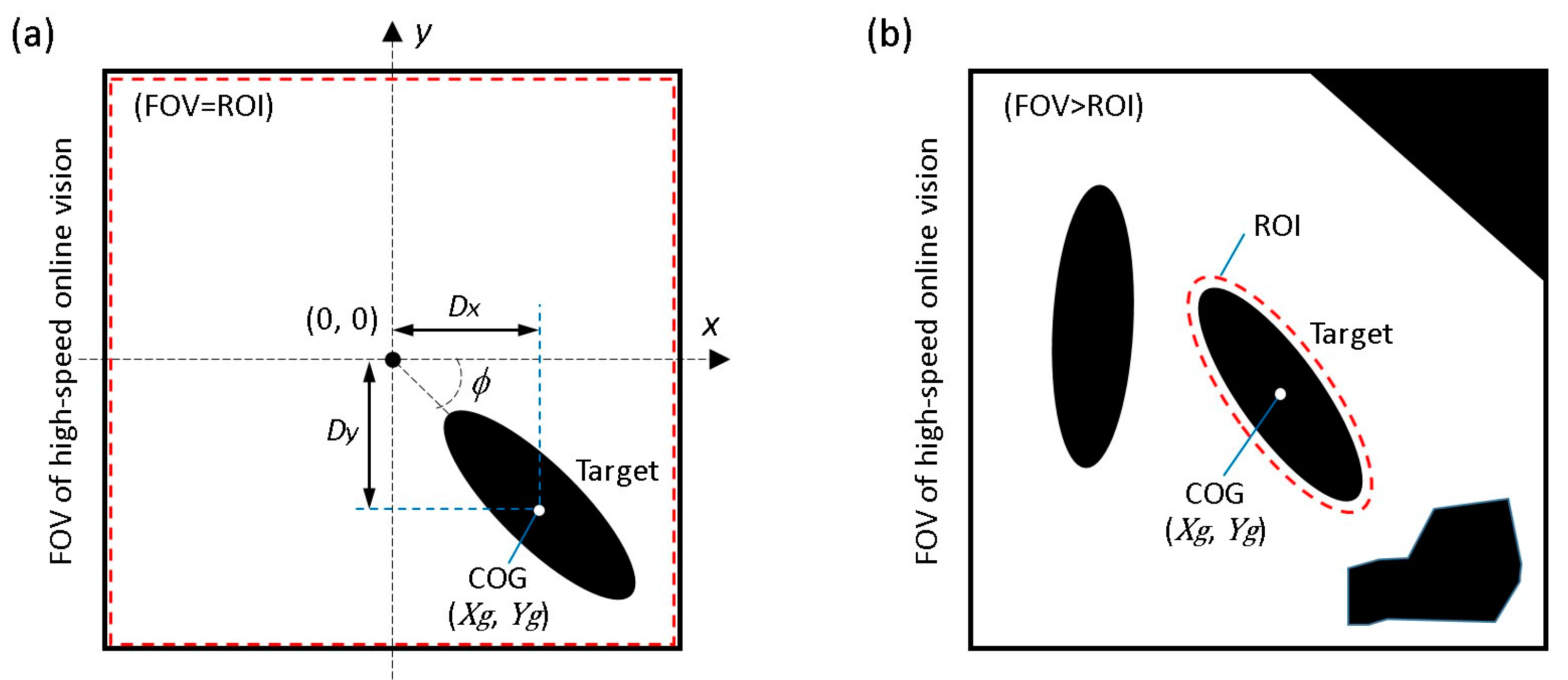
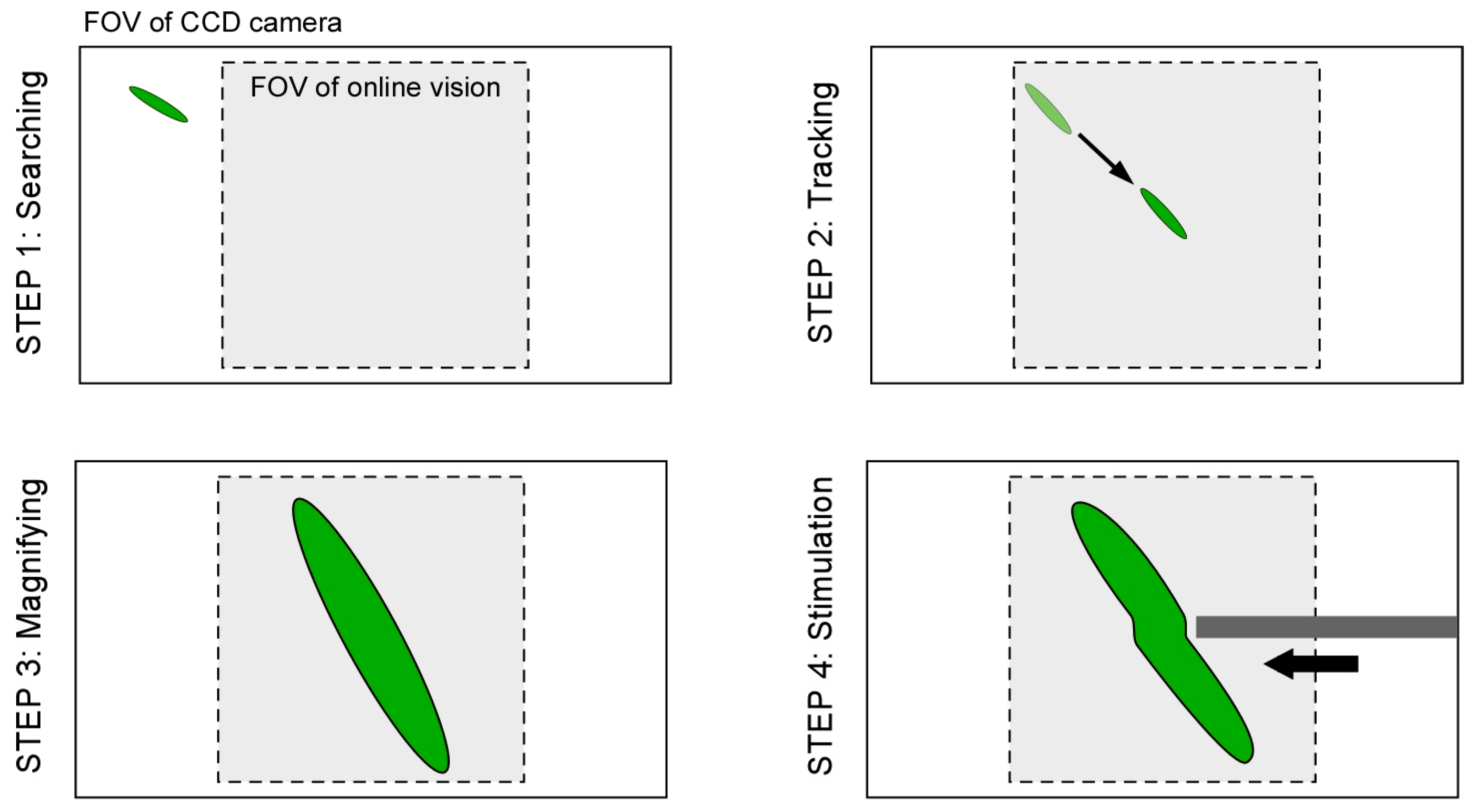
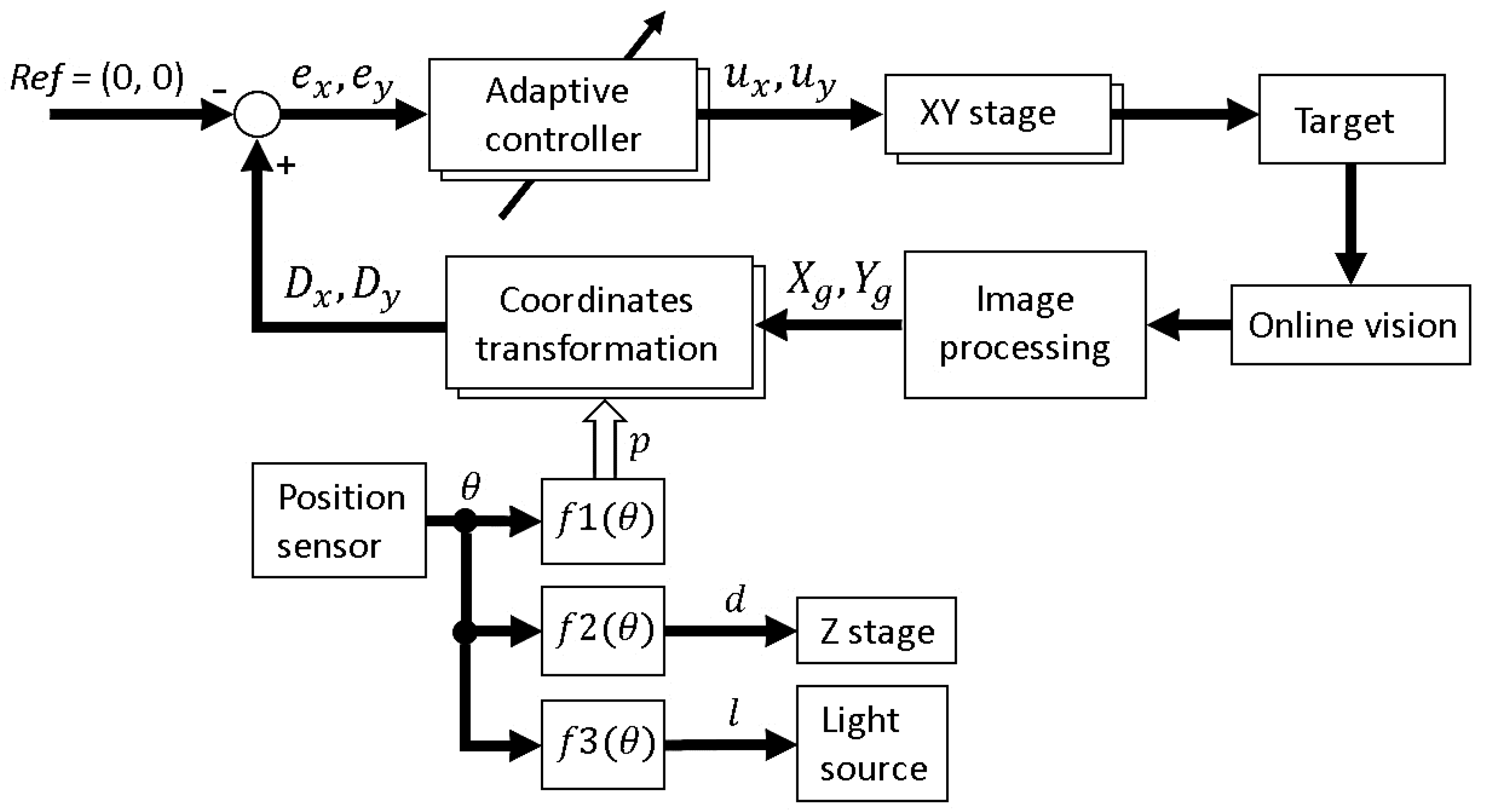
2.4. Visual Tracking Algorithm
3. Experiments
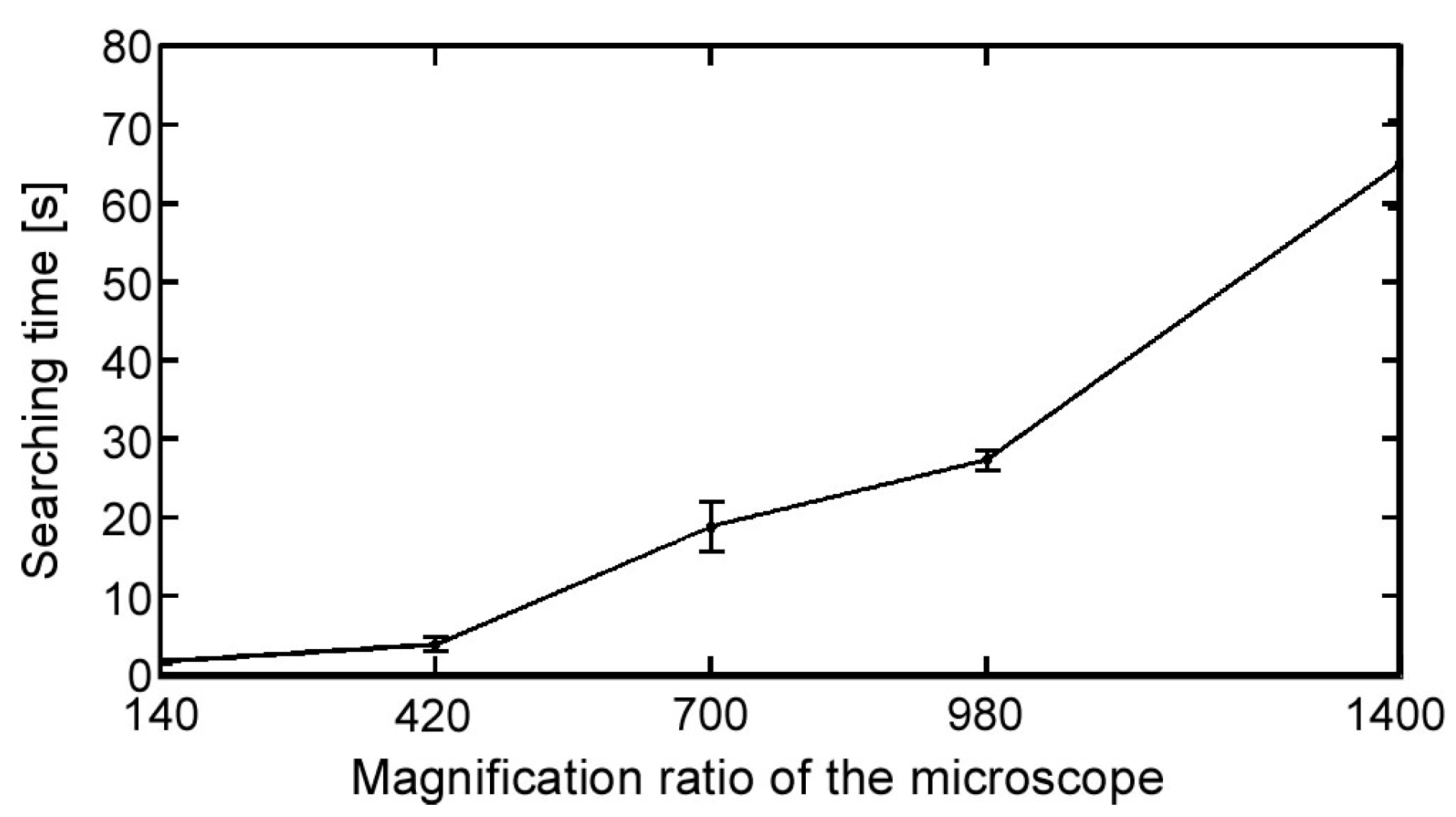
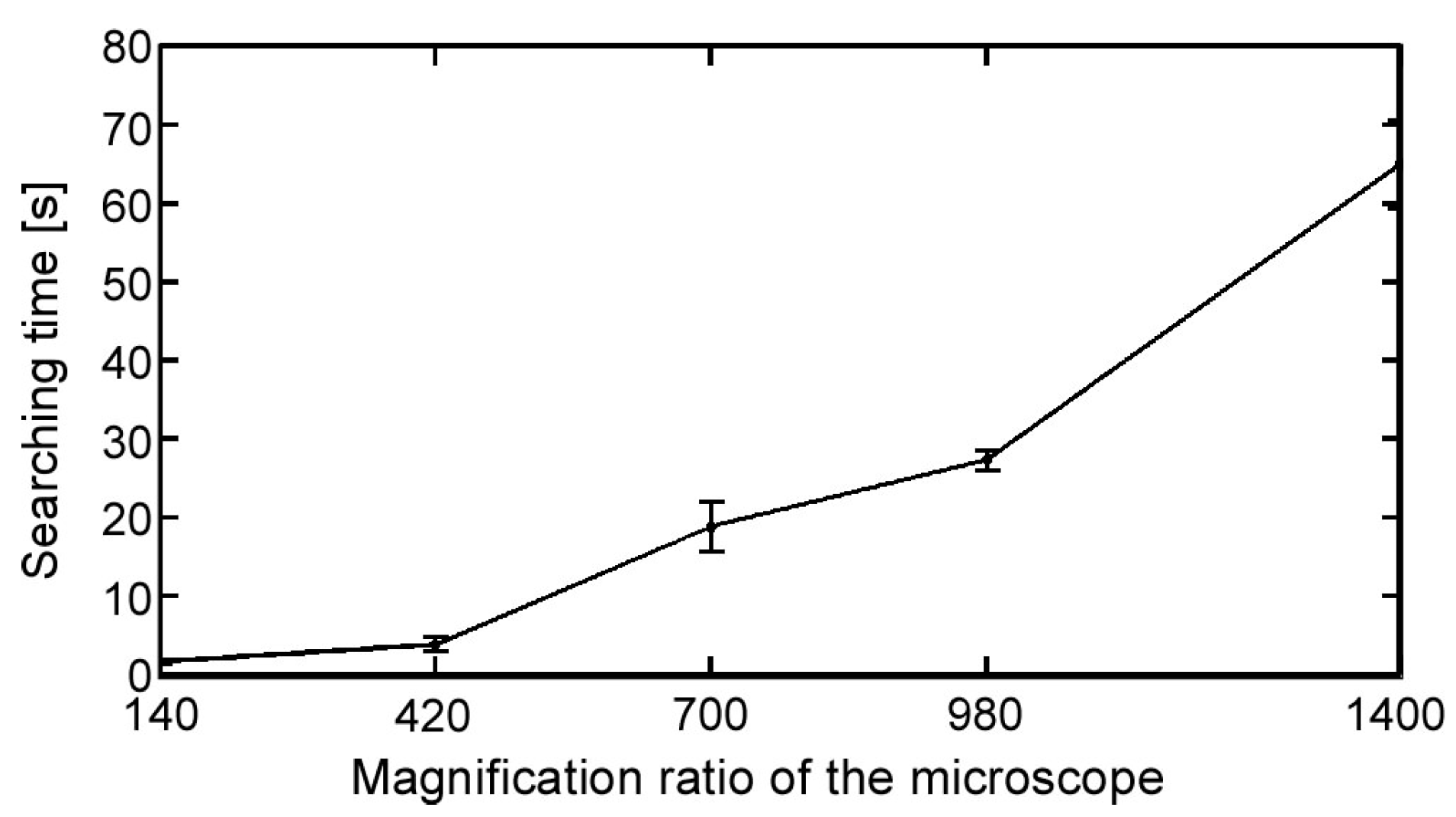
3.1. Magnification Ratio Control Efficiency
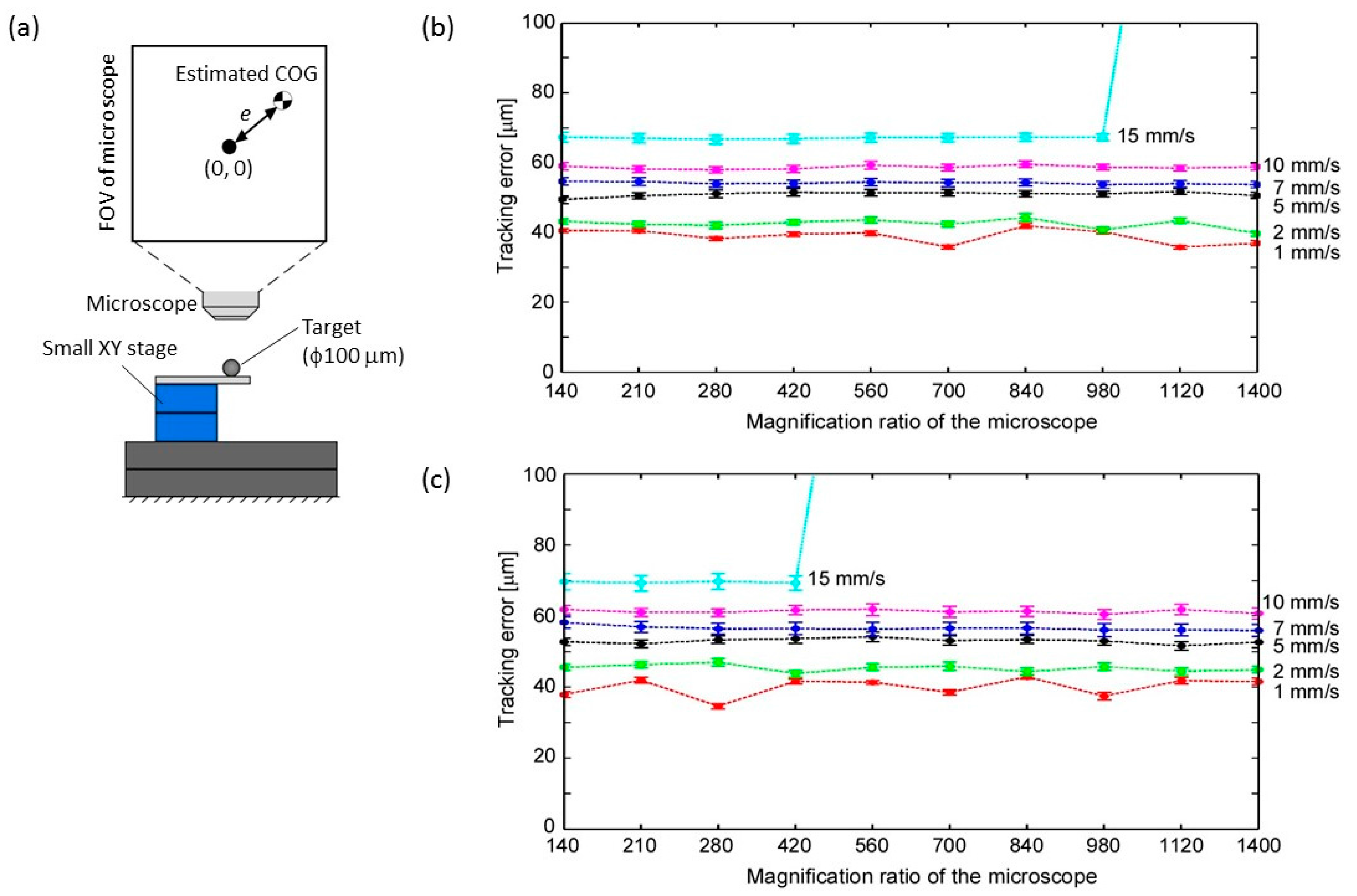
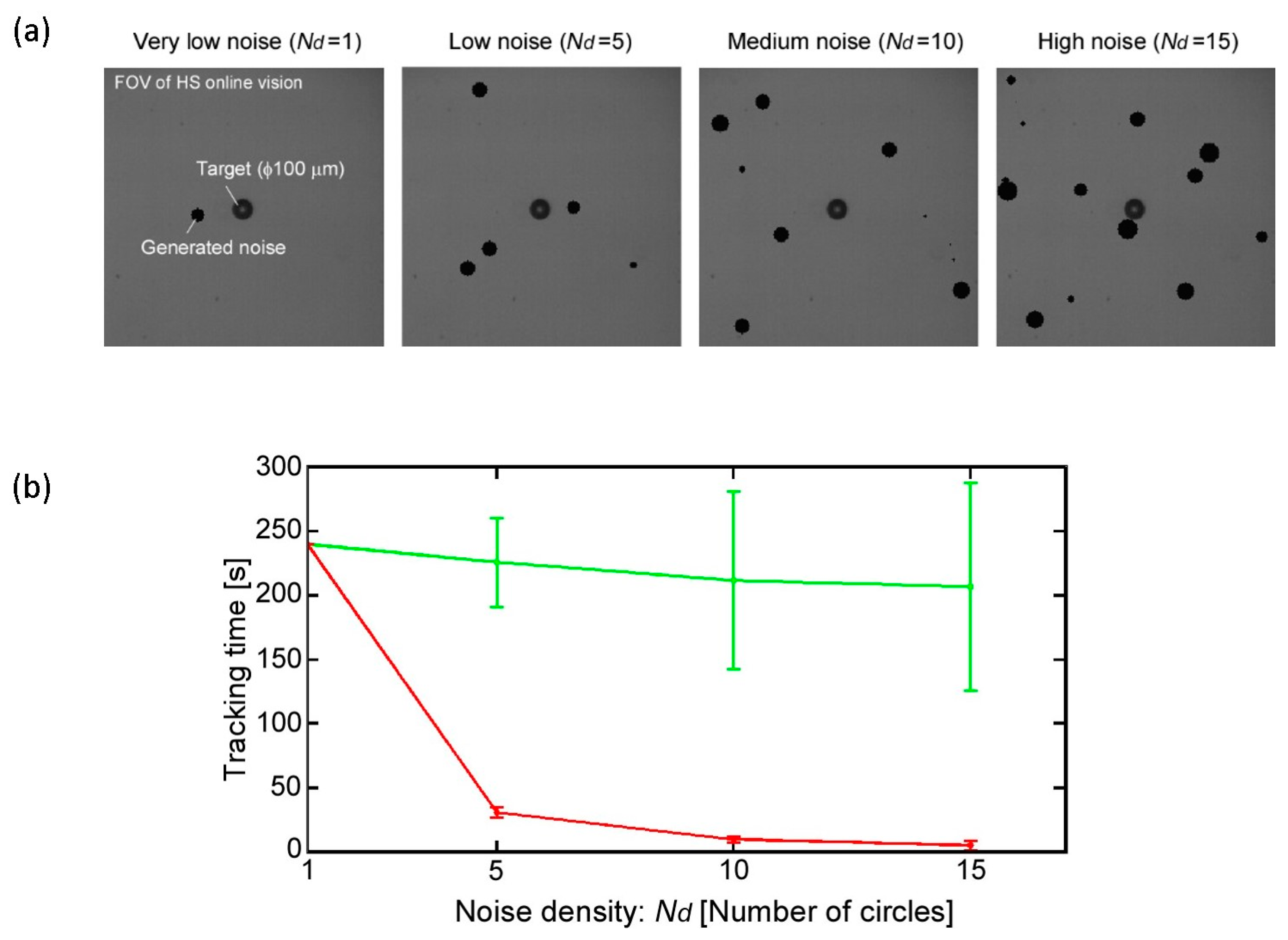
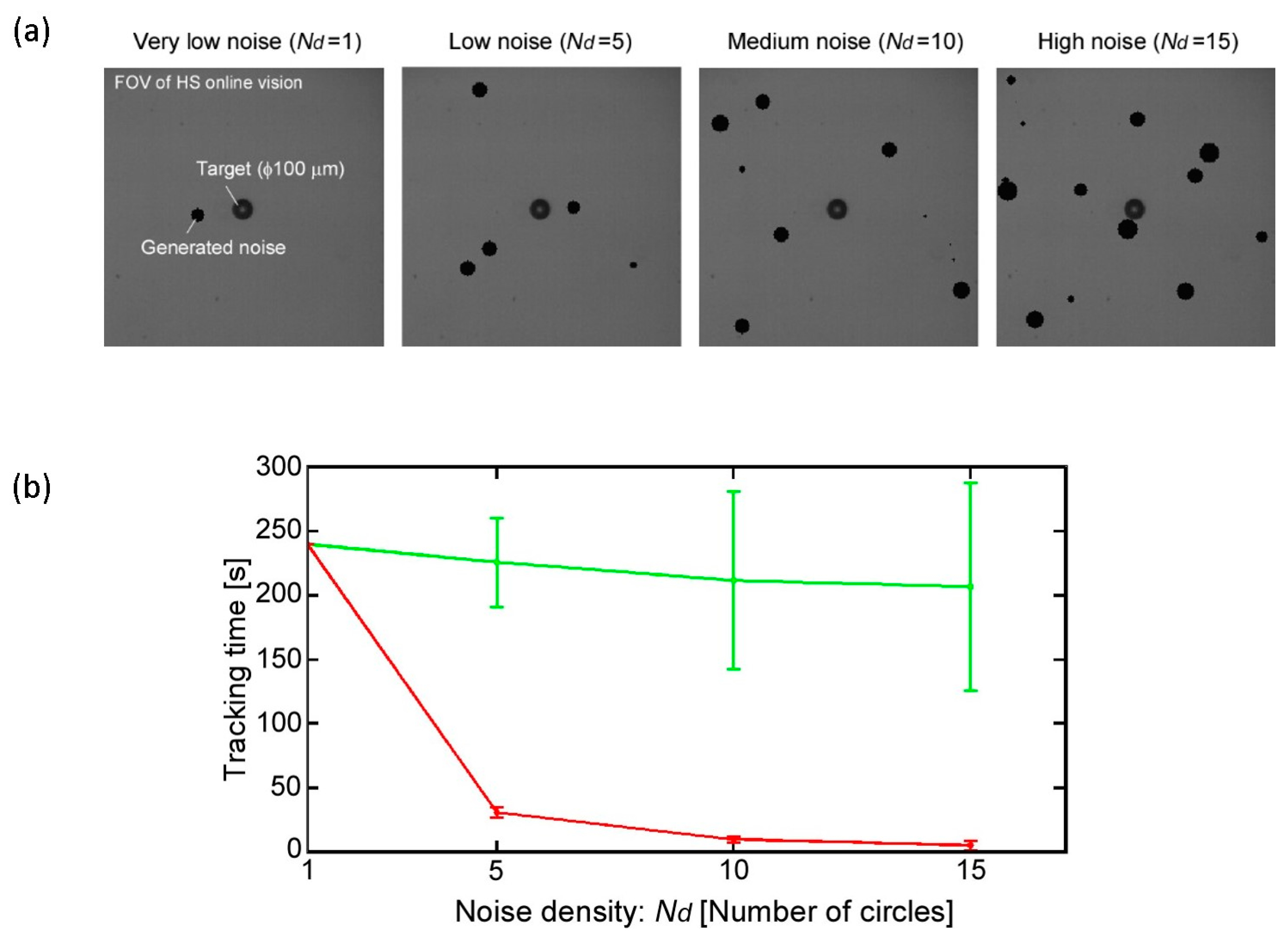
3.2. Tracking Performance Evaluation
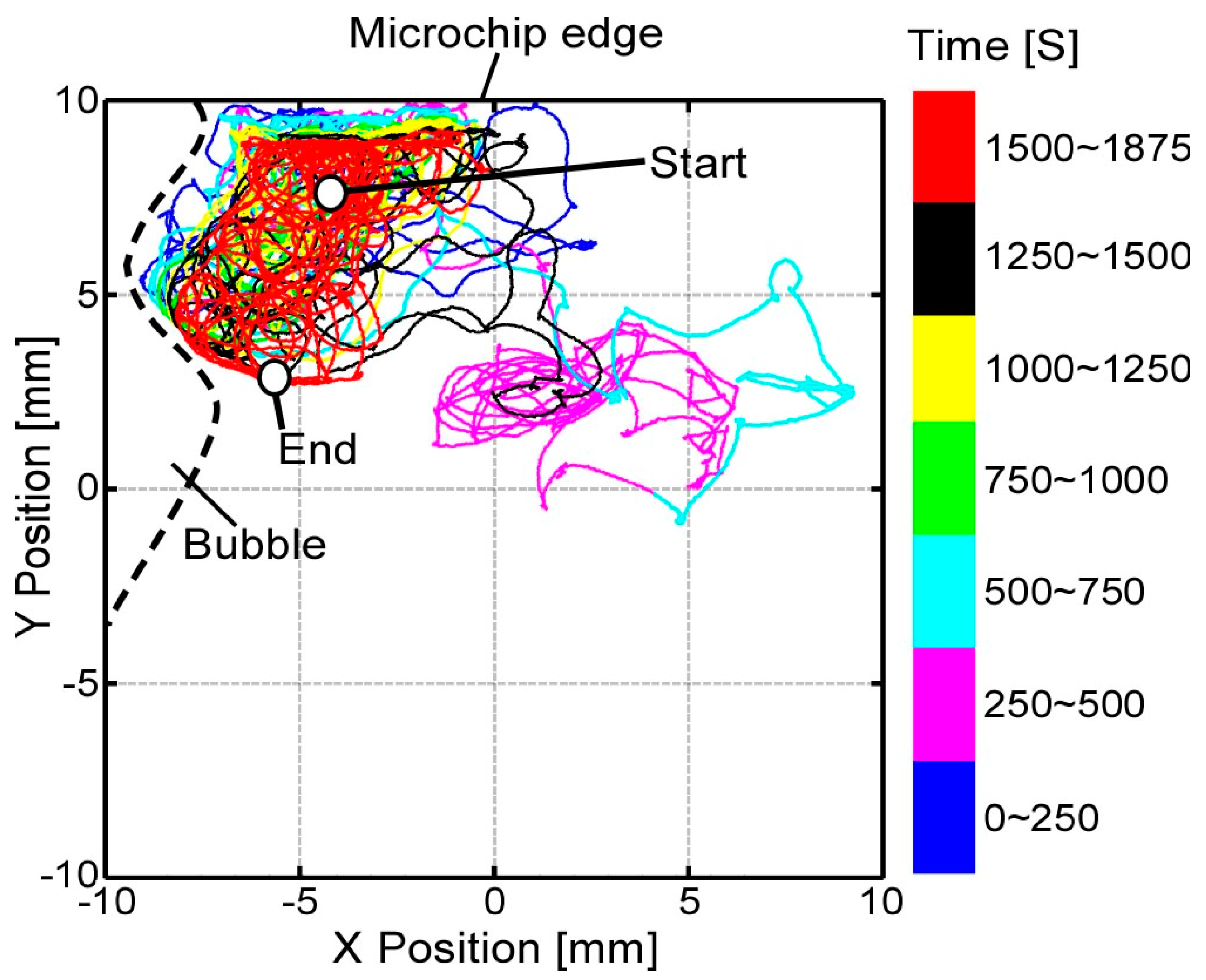
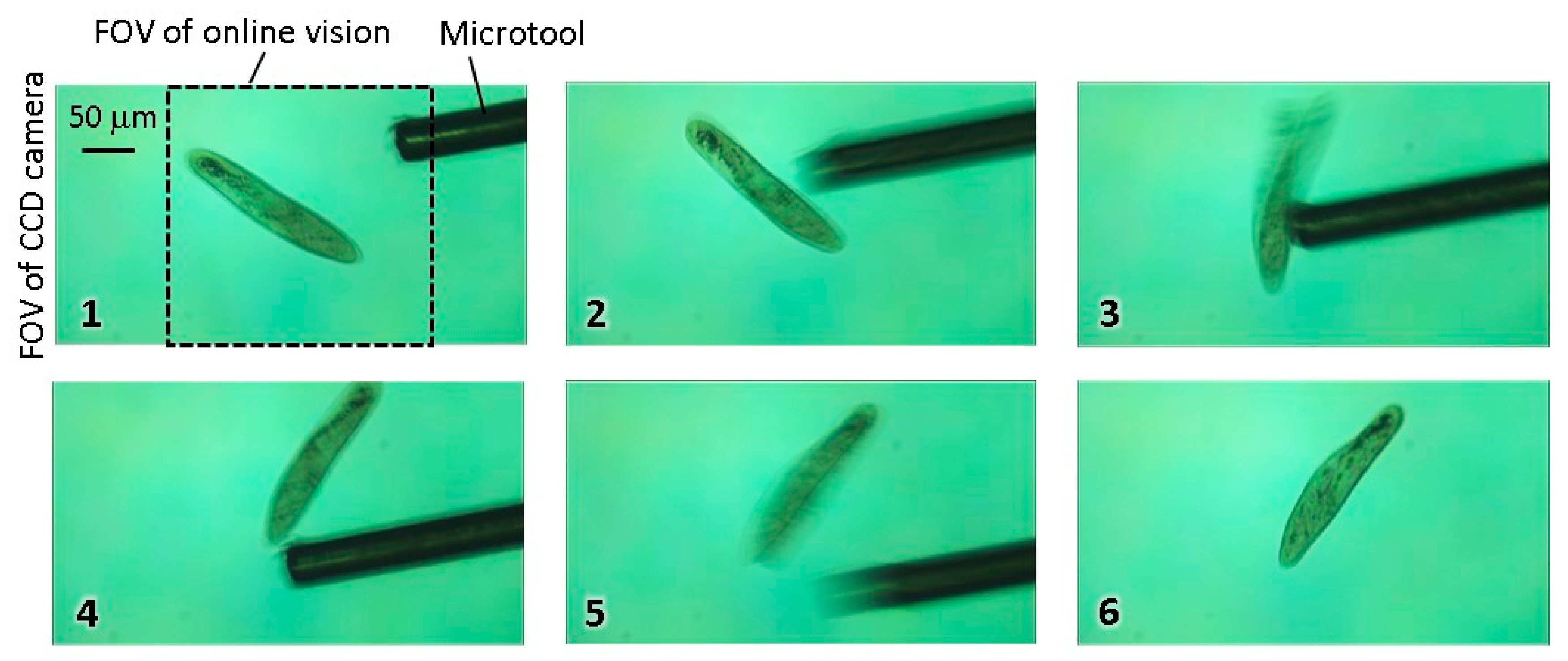
3.3. Application to Actual Motile Microorganism
4. Discussion
5. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Bourdichon, F.; Casaregola, S.; Farrokh, C.; Frisvad, J.C.; Gerds, M.L.; Hammes, W.P.; Harnett, J.; Huys, G.; Laulund, S.; Ouwehand, A.; et al. Food fermentations: Microorganisms with technological beneficial use. Int. J. Food Microbiol. 2012, 154, 87–97. [Google Scholar] [CrossRef] [PubMed]
- Itabashi, T.; Terada, Y.; Kuwana, K.; Kan, T.; Shimoyama, I.; Ishiwata, S.I. Mechanical impulses can control metaphase progression in a mammalian cell. Proc. Natl. Acad. Sci. USA 2012, 109, 7320–7325. [Google Scholar] [CrossRef] [PubMed]
- Carlsen, R.W.; Edwards, M.R.; Zhuang, J.; Pacoret, C.; Sitti, M. Magnetic steering control of multi-cellular bio-hybrid microswimmers. Lab Chip 2014, 14, 3850–3859. [Google Scholar] [CrossRef] [PubMed]
- Wangler, N.; Welsche, M.; Blazek, M.; Blessing, M.; Vervliet-Scheebaum, M.; Reski, R.; Müller, C.; Reinecke, H.; Steigert, J.; Roth, G.; et al. Bubble Jet agent release cartridge for chemical single cell stimulation. Biomed. Microdevices 2013, 15, 1–8. [Google Scholar] [CrossRef] [PubMed]
- Beta, C.; Wyatt, D.; Rappel, W.; Bodenschatz, E. Flow photolysis for spatiotemporal stimulation of single cells. Anal. Chem. 2014, 79, 3940–3944. [Google Scholar] [CrossRef] [PubMed]
- Kim, Y.; Lobatto, M.E.; Kawahara, T. Probing nanoparticle translocation across the permeable endothelium in experimental atherosclerosis. Proc. Natl. Acad. Sci. USA 2014, 111, 1078–1083. [Google Scholar] [CrossRef] [PubMed]
- Tsai, C.H.D.; Sakuma, S.; Arai, F.; Taniguchi, T.; Ohtani, T.; Sakata, Y.; Kaneko, M. Geometrical alignment for improving cell evaluation in a microchannel with application on multiple myeloma red blood cells. RSC Adv. 2014, 4, 45050–45058. [Google Scholar] [CrossRef]
- Makita, N.; Shihira-Ishikawa, I. Chloroplast assemblage by mechanical stimulation and its intercellular transmission in diatom cells. Protoplasma 1997, 197, 86–95. [Google Scholar] [CrossRef]
- Hanada, Y.; Sugioka, K.; Kawano, H.; Ishikawa, I.S.; Miyawaki, A.; Midorikawa, K. Nanoaquarium for dynamic observation of living cells fabricated by femtosecond laser direct writing of photostructurable glass. Biomed. Microdevices 2008, 10, 403–410. [Google Scholar] [CrossRef] [PubMed]
- Hong, S.H.; Jeong, J.; Shim, S.; Kang, H.; Kwon, S.; Ahn, K.H.; Yoon, J. Effect of electric currents on bacterial detachment and inactivation. Biotechnol. Bioeng. 2008, 100, 379–386. [Google Scholar] [CrossRef] [PubMed]
- Bell, W.E.; Hallworthb, R.; Wyattc, T.A.; Sissond, J.H. Use of a novel cell adhesion method and digital measurement to show stimulus-dependent variation in somatic and oral ciliary beat frequency in Paramecium. J. Eukaryot. Microbiol. 2015, 62, 144–148. [Google Scholar] [CrossRef] [PubMed]
- Armus, H.L.; Montgomery, A.R.; Jellison, J.L. Discrimination learning in paramecia (P. caudatum). Psychol. Rec. 2006, 56, 489–498. [Google Scholar] [CrossRef]
- Shi, W.; Qin, J.; Ye, N.; Lin, B. Droplet-based microfluidic system for individual Caenorhabditis elegans assay. Lab Chip 2008, 8, 1432–1435. [Google Scholar] [CrossRef] [PubMed]
- Ogawa, N.; Oku, H.; Hashimoto, K.; Ishikawa, M. Microrobotic visual control of motile cells using high-speed tracking system. IEEE Trans. Robot. 2005, 21, 704–712. [Google Scholar] [CrossRef]
- Berg, H.C. How to track bacteria. Rev. Sci. Instrum. 1971, 42, 868–871. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Berg, H.C.; Brown, D.A. Chemotaxis in Escherichia coli analysed by three-dimensional tracking. Nature 1972, 239, 500–504. [Google Scholar] [CrossRef] [PubMed]
- Holz, D.; Topalidou-Kyniazopoulou, A.; Stückler, J.; Behnke, S. Real-time object detection, localization and verification for fast robotic depalletizing. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 1459–1466. [Google Scholar]
- Borji, A.; Cheng, M.M.; Jiang, H.; Li, J. Salient Object Detection: A Survey. arXiv, 2014; arXiv:1411.5878. [Google Scholar]
- Gu, Q.; Takaki, T.; Ishii, I. Fast FPGA-based multi-object feature extraction. IEEE Trans. Circuits Syst. Video Technol. 2013, 23, 30–45. [Google Scholar] [CrossRef]
- Barkana, I. Gain conditions and convergence of simple adaptive control. Int. J. Adapt. Control Signal Process. 2005, 19, 13–40. [Google Scholar] [CrossRef]
- Bradley, D.; Roth, G. Adaptive thresholding using the integral image. J. Graph. Tools 2007, 12, 13–21. [Google Scholar] [CrossRef]
- Fernando, M.; Oliveira, R.; Santos, V.; Silva, M. Development of Interfaces for Impaired Users. Available online: http://red.pe.org.pl/articles/2012/1a/26.pdf (accessed on 29 September 2017).
- Noda, A.; Yamakawa, Y.; Ishikawa, M. Target tracking behind occlusions using a networked high-speed vision system. In Proceedings of the 2014 IEEE SENSORS, Valencia, Spain, 2–5 November 2014; pp. 2018–2021. [Google Scholar]
- Oku, H.; Ogawa, N.; Ishikawa, M.; Hashimoto, K. Two-dimensional tracking of a motile micro-organism allowing high-resolution observation with various imaging techniques. Rev. Sci. Instrum. 2005, 76, 034301. [Google Scholar] [CrossRef]
- Bannister, L.H. The structure of trichocysts in Paramecium Caudatum. J. Cell Sci. 1972, 11, 899–929. [Google Scholar] [PubMed]
- Hamel, A.; Fisch, C.; Combettes, L.; Dupuis-Williams, P.; Baroud, C.N. Transitions between three swimming gaits in Paramecium escape. Proc. Natl. Acad. Sci. USA 2011, 108, 7290–7295. [Google Scholar] [CrossRef] [PubMed] [Green Version]


© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmad, B.; Maeda, H.; Kawahara, T.; Arai, F. Microrobotic Platform for Single Motile Microorganism Investigation. Micromachines 2017, 8, 295. https://doi.org/10.3390/mi8100295
Ahmad B, Maeda H, Kawahara T, Arai F. Microrobotic Platform for Single Motile Microorganism Investigation. Micromachines. 2017; 8(10):295. https://doi.org/10.3390/mi8100295
Chicago/Turabian StyleAhmad, Belal, Hironobu Maeda, Tomohiro Kawahara, and Fumihito Arai. 2017. "Microrobotic Platform for Single Motile Microorganism Investigation" Micromachines 8, no. 10: 295. https://doi.org/10.3390/mi8100295
APA StyleAhmad, B., Maeda, H., Kawahara, T., & Arai, F. (2017). Microrobotic Platform for Single Motile Microorganism Investigation. Micromachines, 8(10), 295. https://doi.org/10.3390/mi8100295