Investigations of the Effects of Geometric Imperfections on the Nonlinear Static and Dynamic Behavior of Capacitive Micomachined Ultrasonic Transducers



Abstract
:1. Introduction
2. Mathematical Model
- The material of the plate is elastic, homogeneous, and isotropic.
- A straight line (filament), initially normal to the midplane, remains straight and normal to the surface during the deformation.
- The stress normal to the midplane, , is small compared to the other stress components and may be neglected in the stress-strain relations.
2.1. Problem Formulation
2.2. Dimensional Equations of Motion
2.3. Nondimensional Equations of Motion
3. Discretization
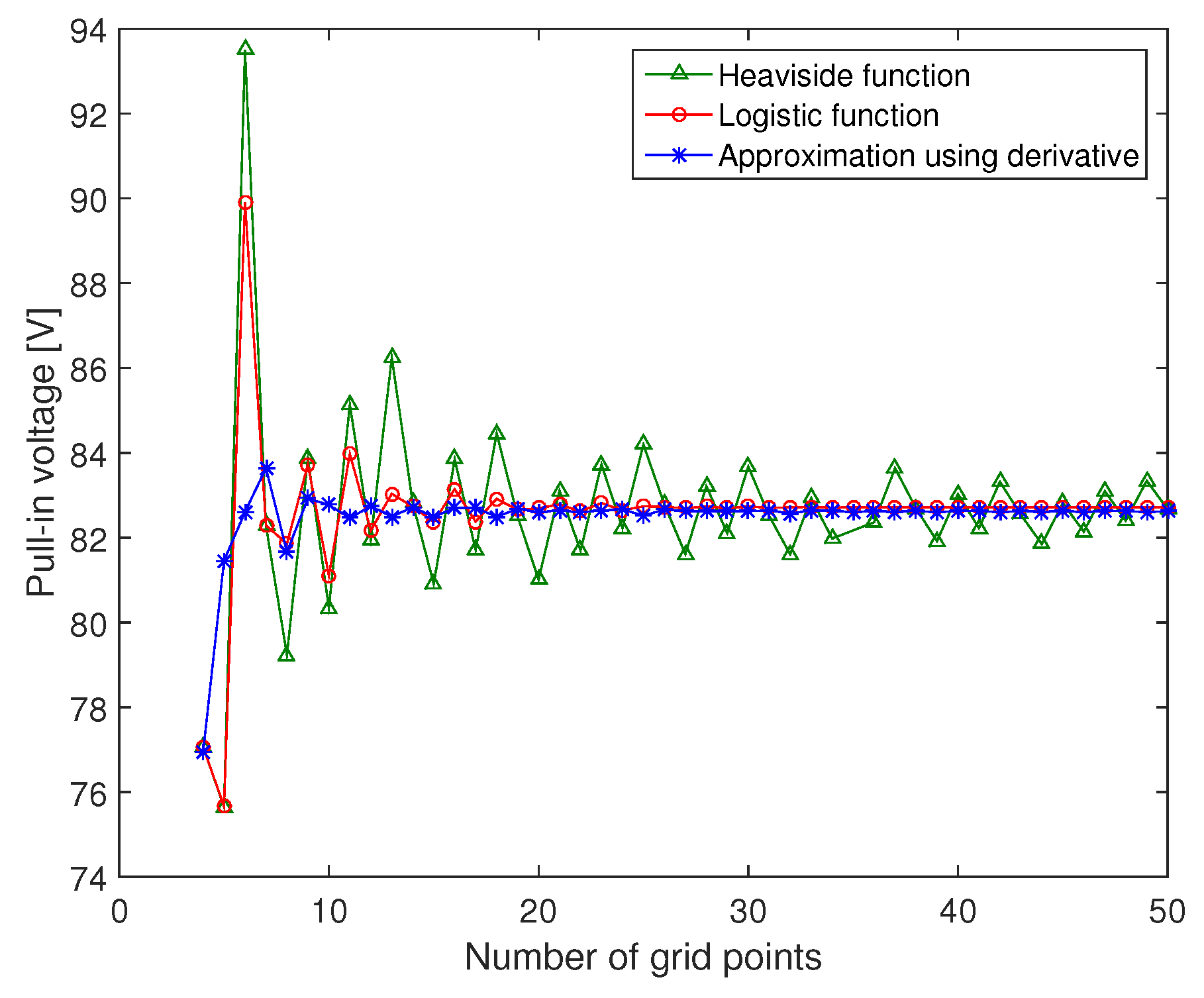
3.1. Differential Quadrature Method
3.2. Discretized Equations of Motion
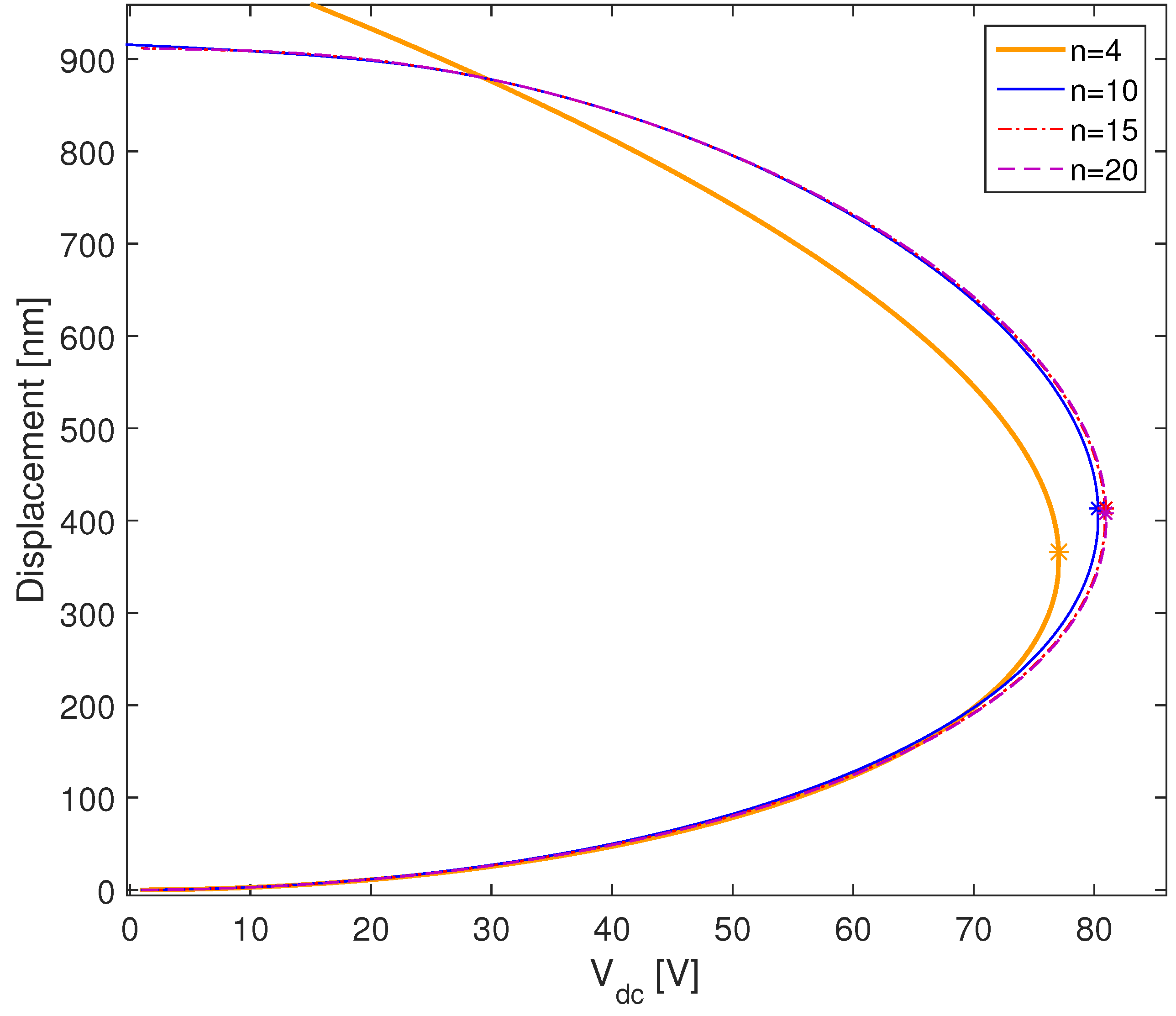
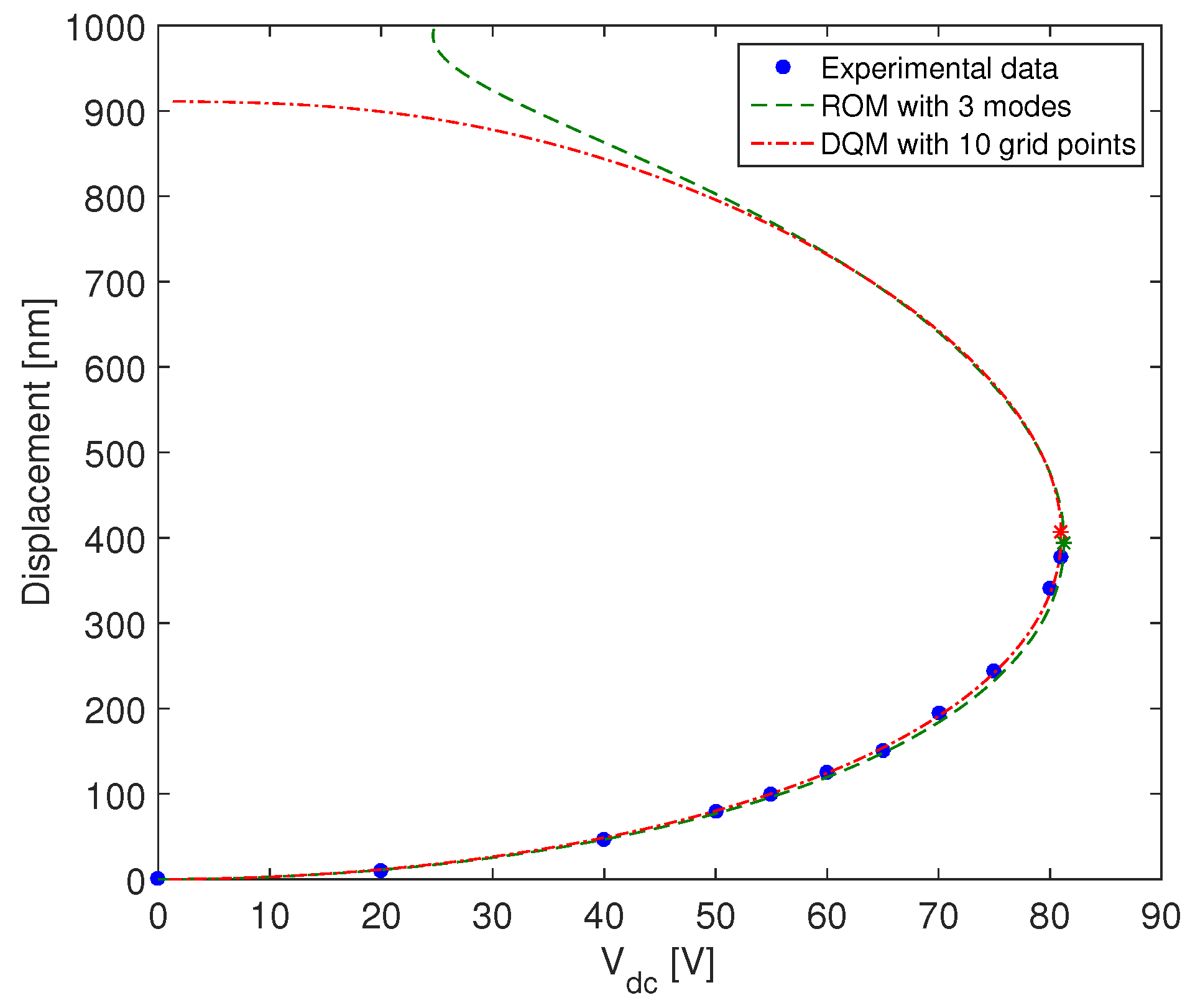
4. Static Response
Implementation of the Arclength Method
5. Eigenfrequency Analysis
6. Nonlinear Dynamic Analysis
6.1. Frequency Response
6.2. Force Response Analysis
7. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Appendix A
References
- Souayeh, S.; Kacem, N. Computational models for large amplitude nonlinear vibrations of electrostatically actuated carbon nanotube-based mass sensors. Sens. Actuators A Phys. 2014, 208, 10–20. [Google Scholar] [CrossRef]
- Laser, D.J.; Santiago, J.G. A review of micropumps. J. Micromech. Microeng. 2004, 14, R35. [Google Scholar] [CrossRef]
- Senturia, S.D. Microsystem Design; Springer Science & Business Media: New York, NY, USA, 2001. [Google Scholar]
- Acar, C.; Shkel, A. MEMS Vibratory Gyroscopes: Structural Approaches to Improve Robustness; Springer Science & Business Media: Norwell, MA, USA, 2008. [Google Scholar]
- Boxenhorn, B.; Greiff, P. A vibratory micromechanical gyroscope. In Proceedings of the Guidance, Navigation and Control Conference, Minneapolis, MN, USA, 15–17 August 1988; p. 4177. [Google Scholar]
- Haller, M.; Khuri-Yakub, B. A surface micromachined electrostatic ultrasonic air transducer. In Proceedings of the IEEE Ultrasonics Symposium, Cannes, France, 31 October–3 November 1994; Volume 2, pp. 1241–1244. [Google Scholar]
- Haller, M.I.; Khuri-Yakub, B.T. A surface micromachined electrostatic ultrasonic air transducer. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1996, 43, 1–6. [Google Scholar] [CrossRef]
- Huang, Y.; Ergun, A.S.; Haeggstrom, E.; Badi, M.H.; Khuri-Yakub, B.T. Fabricating capacitive micromachined ultrasonic transducers with wafer-bonding technology. J. Microelectromech. Syst. 2003, 12, 128–137. [Google Scholar] [CrossRef] [Green Version]
- Knight, J.; McLean, J.; Degertekin, F.L. Low temperature fabrication of immersion capacitive micromachined ultrasonic transducers on silicon and dielectric substrates. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2004, 51, 1324–1333. [Google Scholar] [CrossRef]
- Badi, M.H.; Yaralioglu, G.G.; Ergun, A.S.; Hansen, S.T.; Wong, E.J.; Khuri-Yakub, B.T. Capacitive micromachined ultrasonic Lamb wave transducers using rectangular membranes. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2003, 50, 1191–1203. [Google Scholar] [CrossRef] [PubMed]
- Eccardt, P.C.; Niederer, K.; Scheiter, T.; Hierold, C. Surface micromachined ultrasound transducers in CMOS technology. In Proceedings of the IEEE Ultrasonics Symposium, San Antonio, TX, USA, 3–6 November 1996; Volume 2, pp. 959–962. [Google Scholar]
- Salim, M.S.; Malek, M.A.; Heng, R.; Juni, K.; Sabri, N. Capacitive micromachined ultrasonic transducers: Technology and application. J. Med. Ultrasound 2012, 20, 8–31. [Google Scholar] [CrossRef]
- Sharma, J.; DasGupta, A. Effect of stress on the pull-in voltage of membranes for MEMS application. J. Micromech. Microeng. 2009, 19, 115021. [Google Scholar] [CrossRef]
- Inzinga, R.; Lin, T.W.; Yadav, M.; Johnson, H.; Horn, G. Characterization and control of residual stress and curvature in anodically bonded devices and substrates with etched features. Exp. Mech. 2012, 52, 637–648. [Google Scholar] [CrossRef]
- Younis, M.I.; Ouakad, H.M.; Alsaleem, F.M.; Miles, R.; Cui, W. Nonlinear dynamics of MEMS arches under harmonic electrostatic actuation. J. Microelectromech. Syst. 2010, 19, 647–656. [Google Scholar] [CrossRef]
- Ouakad, H.M.; Najar, F.; Hattab, O. Nonlinear analysis of electrically actuated carbon nanotube resonator using a novel discretization technique. Math. Probl. Eng. 2013, 2013, 517695. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, Y.; Li, Z.; Huang, Y.; Li, D. Snap-through and pull-in instabilities of an arch-shaped beam under an electrostatic loading. J. Microelectromech. Syst. 2007, 16, 684–693. [Google Scholar] [CrossRef]
- Krylov, S.; Ilic, B.R.; Schreiber, D.; Seretensky, S.; Craighead, H. The pull-in behavior of electrostatically actuated bistable microstructures. J. Micromech. Microeng. 2008, 18, 055026. [Google Scholar] [CrossRef]
- Dehrouyeh-Semnani, A.M.; Mostafaei, H.; Nikkhah-Bahrami, M. Free flexural vibration of geometrically imperfect functionally graded microbeams. Int. J. Eng. Sci. 2016, 105, 56–79. [Google Scholar] [CrossRef]
- Lacarbonara, W.; Arafat, H.N.; Nayfeh, A.H. Nonlinear responses of shallow arches at veering. In Proceedings of the 44th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Norfolk, Virginia, 7–10 April 2003; p. 1845. [Google Scholar]
- Ouakad, H.M.; Younis, M.I. Natural frequencies and mode shapes of initially curved carbon nanotube resonators under electric excitation. J. Sound Vib. 2011, 330, 3182–3195. [Google Scholar] [CrossRef]
- Ouakad, H.M.; Younis, M.I. Dynamic response of slacked single-walled carbon nanotube resonators. Nonlinear Dyn. 2012, 67, 1419–1436. [Google Scholar] [CrossRef]
- Perkins, N.; Mote, C. Comments on curve veering in eigenvalue problems. J. Sound Vib. 1986, 106, 451–463. [Google Scholar] [CrossRef]
- Rega, G. Nonlinear vibrations of suspended cables—Part I: Modeling and analysis. Appl. Mech. Rev. 2004, 57, 443–478. [Google Scholar] [CrossRef]
- Ruzziconi, L.; Bataineh, A.M.; Younis, M.I.; Cui, W.; Lenci, S. Nonlinear dynamics of an electrically actuated imperfect microbeam resonator: Experimental investigation and reduced-order modeling. J. Micromech. Microeng. 2013, 23, 075012. [Google Scholar] [CrossRef]
- Ruzziconi, L.; Younis, M.I.; Lenci, S. An electrically actuated imperfect microbeam: Dynamical integrity for interpreting and predicting the device response. Meccanica 2013, 48, 1761–1775. [Google Scholar] [CrossRef]
- Ramini, A.; Bellaredj, M.L.; Al Hafiz, M.A.; Younis, M.I. Experimental investigation of snap-through motion of in-plane MEMS shallow arches under electrostatic excitation. J. Micromech. Microeng. 2015, 26, 015012. [Google Scholar] [CrossRef] [Green Version]
- Bataineh, A.M.; Younis, M.I. Dynamics of a clamped–clamped microbeam resonator considering fabrication imperfections. Microsyst. Technol. 2015, 21, 2425–2434. [Google Scholar] [CrossRef]
- Hajjaj, A.Z.; Hafiz, M.A.; Younis, M.I. Mode Coupling and Nonlinear Resonances of MEMS Arch Resonators for Bandpass Filters. Sci. Rep. 2017, 7, 41820. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, Y.; Li, Z.; McCormick, D.T.; Tien, N.C. A low-voltage lateral MEMS switch with high RF performance. J. Microelectromech. Syst. 2004, 13, 902–911. [Google Scholar] [CrossRef]
- Hafiz, M.A.A.; Kosuru, L.; Younis, M.I. Microelectromechanical reprogrammable logic device. Nat. Commun. 2016, 7, 11137. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Saghir, S.; Bellaredj, M.; Ramini, A.; Younis, M.I. Initially curved microplates under electrostatic actuation: Theory and experiment. J. Micromech. Microeng. 2016, 26, 095004. [Google Scholar] [CrossRef]
- Saghir, S.; Ilyas, S.; Jaber, N.; Younis, M.I. An experimental and theoretical investigation of the mechanical behavior of multilayer initially curved microplates under electrostatic actuation. J. Vib. Acoust. 2017, 139, 040901. [Google Scholar] [CrossRef]
- Celep, Z. Free flexural vibration of initially imperfect thin plates with large elastic amplitudes. ZAMM-J. Appl. Math. Mech./Z. Angew. Math. Mech. 1976, 56, 423–428. [Google Scholar] [CrossRef]
- Celep, Z. Shear and rotatory inertia effects on the large amplitude vibration of the initially imperfect plates. J. Appl. Mech. 1980, 47, 662–666. [Google Scholar] [CrossRef]
- Chen, C.S.; Cheng, W.S.; Tan, A.H. Non-linear vibration of initially stressed plates with initial imperfections. Thin-Walled Struct. 2005, 43, 33–45. [Google Scholar] [CrossRef]
- Medina, L.; Gilat, R.; Krylov, S. Bistable behavior of electrostatically actuated initially curved micro plate. Sens. Actuators A Phys. 2016, 248, 193–198. [Google Scholar] [CrossRef]
- Medina, L.; Gilat, R.; Krylov, S. Modeling strategies of electrostatically actuated initially curved bistable micro plates. Int. J. Solids Struct. 2017, 118–119, 1–13. [Google Scholar] [CrossRef]
- Vogl, G.W.; Nayfeh, A.H. A reduced-order model for electrically actuated clamped circular plates. J. Micromech. Microeng. 2005, 15, 684. [Google Scholar] [CrossRef]
- Vogl, G.W.; Nayfeh, A.H. Primary resonance excitation of electrically actuated clamped circular plates. Nonlinear Dyn. 2007, 47, 181–192. [Google Scholar] [CrossRef]
- Nayfeh, A.H. Introduction to Perturbation Techniques; John Wiley & Sons: Hoboken, NJ, USA, 1981. [Google Scholar]
- Touzé, C.; Thomas, O.; Chaigne, A. Asymmetric non-linear forced vibrations of free-edge circular plates. Part 1: Theory. J. Sound Vib. 2002, 258, 649–676. [Google Scholar] [CrossRef]
- Thomas, O.; Touzé, C.; Chaigne, A. Asymmetric non-linear forced vibrations of free-edge circular plates. Part II: Experiments. J. Sound Vib. 2003, 265, 1075–1101. [Google Scholar] [CrossRef]
- Bellman, R.; Casti, J. Differential quadrature and long-term integration. J. Math. Anal. Appl. 1971, 34, 235–238. [Google Scholar] [CrossRef]
- Najar, F.; Choura, S.; El-Borgi, S.; Abdel-Rahman, E.; Nayfeh, A. Modeling and design of variable-geometry electrostatic microactuators. J. Micromech. Microeng. 2004, 15, 419. [Google Scholar] [CrossRef]
- Fantuzzi, N. Generalized Differential Quadrature Finite Element Method Applied to Advanced Structural Mechanics. Ph.D. Thesis, Alma Mater Studiorum Università di Bologna, Bologna, Italy, 2013. [Google Scholar]
- Jallouli, A.; Kacem, N.; Bourbon, G.; Le Moal, P.; Walter, V.; Lardies, J. Pull-in instability tuning in imperfect nonlinear circular microplates under electrostatic actuation. Phys. Lett. A 2016, 380, 3886–3890. [Google Scholar] [CrossRef]
- Luan, B.; Robbins, M.O. The breakdown of continuum models for mechanical contacts. Nature 2005, 435, 929–932. [Google Scholar] [CrossRef] [PubMed]
- Ventsel, E.; Krauthammer, T. Thin Plates and Shells: Theory: Analysis, and Applications; CRC Press: Boca Raton, FL, USA, 2001. [Google Scholar]
- Nayfeh, A.H.; Pai, P.F. Linear and Nonlinear Structural Mechanics; John Wiley & Sons: Chichester, UK, 2004. [Google Scholar]
- Motamedi, M.E. MOEMS: Micro-Opto-Electro-Mechanical Systems; SPIE Press: Bellingham, WA, USA, 2005; Volume 126. [Google Scholar]
- Bert, C.W.; Malik, M. Semianalytical differential quadrature solution for free vibration analysis of rectangular plates. AIAA J. 1996, 34, 601–606. [Google Scholar] [CrossRef]
- Quan, J.; Chang, C. New insights in solving distributed system equations by the quadrature method—I. Analysis. Comput. Chem. Eng. 1989, 13, 779–788. [Google Scholar] [CrossRef]
- Shu, C.; Richard, B. Parallel simulation of incompressible viscous flows by generalized differential quadrature. Comput. Syst. Eng. 1992, 3, 271–281. [Google Scholar] [CrossRef]
- Shu, C.; Richards, B.E. Application of generalized differential quadrature to solve two-dimensional incompressible Navier-Stokes equations. Int. J. Numer. Methods Fluids 1992, 15, 791–798. [Google Scholar] [CrossRef]
- Weaver, J.R. Centrosymmetric (cross-symmetric) matrices, their basic properties, eigenvalues, and eigenvectors. Am. Math. Mon. 1985, 92, 711–717. [Google Scholar] [CrossRef]
- Chen, W.; Yu, Y.; Wang, X. Reducing the computational requirements of the differential quadrature method. Numer. Methods Partial Differ. Equat. 1996, 12, 565–577. [Google Scholar] [CrossRef] [Green Version]
- Bert, C.W.; Malik, M. Differential quadrature method in computational mechanics: A review. Appl. Mech. Rev. 1996, 49, 1–28. [Google Scholar] [CrossRef]
- Eftekhari, S. A differential quadrature procedure with direct projection of the heaviside function for numerical solution of moving load problem. Lat. Am. J. Solids Struct. 2016, 13, 1763–1781. [Google Scholar] [CrossRef]
- Jung, J.H.; Khanna, G.; Nagle, I. A spectral collocation approximation for the radial-infall of a compact object into a Schwarzschild black hole. Int. J. Mod. Phys. C 2009, 20, 1827–1848. [Google Scholar] [CrossRef]
- Alkharabsheh, S.A.; Younis, M.I. Statics and dynamics of MEMS arches under axial forces. J. Vib. Acoust. 2013, 135, 021007. [Google Scholar] [CrossRef]
- Ouakad, H.M. An electrostatically actuated MEMS arch band-pass filter. Shock Vib. 2013, 20, 809–819. [Google Scholar] [CrossRef]
- Cochelin, B.; Vergez, C. A high order purely frequency-based harmonic balance formulation for continuation of periodic solutions. J. Sound Vib. 2009, 324, 243–262. [Google Scholar] [CrossRef] [Green Version]
- Jallouli, A.; Kacem, N.; Lardies, J. Nonlinear Static and Dynamic Behavior of an Imperfect Circular Microplate Under Electrostatic Actuation. In Proceedings of the ASME 2017 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. American Society of Mechanical Engineers, Cleveland, OH, USA, 6–9 August 2017; p. V004T09A013. [Google Scholar]
- Kacem, N.; Baguet, S.; Hentz, S.; Dufour, R. Pull-in retarding in nonlinear nanoelectromechanical resonators under superharmonic excitation. J. Comput. Nonlinear Dyn. 2012, 7, 021011. [Google Scholar] [CrossRef] [Green Version]
- Kacem, N.; Baguet, S.; Hentz, S.; Dufour, R. Nonlinear phenomena in nanomechanical resonators: Mechanical behaviors and physical limitations. Méc. Ind. 2010, 11, 521–529. [Google Scholar] [CrossRef]
- Juillard, J.; Bonnoit, A.; Avignon, E.; Hentz, S.; Kacem, N.; Colinet, E. From MEMS to NEMS: Closed-loop actuation of resonant beams beyond the critical Duffing amplitude. In Proceedings of the 2008 IEEE Sensors, Lecce, Italy, 26–29 October 2008; pp. 510–513. [Google Scholar] [CrossRef]
- Kacem, N.; Hentz, S.; Baguet, S.; Dufour, R. Forced large amplitude periodic vibrations of non-linear Mathieu resonators for microgyroscope applications. Int. J. Non-Linear Mech. 2011, 46, 1347–1355. [Google Scholar] [CrossRef] [Green Version]
- Kacem, N.; Hentz, S. Bifurcation topology tuning of a mixed behavior in nonlinear micromechanical resonators. Appl. Phys. Lett. 2009, 95, 183104. [Google Scholar] [CrossRef]
- Nayfeh, A.H.; Younis, M.I.; Abdel-Rahman, E.M. Dynamic pull-in phenomenon in MEMS resonators. Nonlinear Dyn. 2007, 48, 153–163. [Google Scholar] [CrossRef]
- Watson, L.T. Numerical linear algebra aspects of globally convergent homotopy methods. SIAM Rev. 1986, 28, 529–545. [Google Scholar] [CrossRef]
- Watson, L.T. Globally convergent homotopy algorithms for nonlinear systems of equations. Nonlinear Dyn. 1990, 1, 143–191. [Google Scholar] [CrossRef] [Green Version]
- Allgower, E.L.; Georg, K. Numerical Continuation Methods: An Introduction; Springer Science & Business Media: Berlin, Germany, 2012; Volume 13. [Google Scholar]
- Nayfeh, A.H.; Balachandran, B. Applied Nonlinear Dynamics: Analytical, Computational and Experimental Methods; John Wiley & Sons: Chichester, UK, 1995. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Quantity | Dimension |
|---|---|---|
| E | Young’s modulus | 149 [GPa] |
| Density | 2330 [kg/m3] | |
| Poisson’s ratio | 0.27 | |
| R | Radius of the microplate | 86 [µm] |
| Radius of the electrode | 54 [µm] | |
| h | Thickness of the microplate | 2.3 [µm] |
| d | Gap distance | 0.75 [µm] |
| Initial deflection | 161 [nm] |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jallouli, A.; Kacem, N.; Lardies, J. Investigations of the Effects of Geometric Imperfections on the Nonlinear Static and Dynamic Behavior of Capacitive Micomachined Ultrasonic Transducers. Micromachines 2018, 9, 575. https://doi.org/10.3390/mi9110575
Jallouli A, Kacem N, Lardies J. Investigations of the Effects of Geometric Imperfections on the Nonlinear Static and Dynamic Behavior of Capacitive Micomachined Ultrasonic Transducers. Micromachines. 2018; 9(11):575. https://doi.org/10.3390/mi9110575
Chicago/Turabian StyleJallouli, Aymen, Najib Kacem, and Joseph Lardies. 2018. "Investigations of the Effects of Geometric Imperfections on the Nonlinear Static and Dynamic Behavior of Capacitive Micomachined Ultrasonic Transducers" Micromachines 9, no. 11: 575. https://doi.org/10.3390/mi9110575