

Simulation of the Frequency Response Analysis of Gas Diffusion in Zeolites by Means of Computational Fluid Dynamics


Abstract
:1. Introduction
2. Materials and Methods
2.1. Model Definition
- The arbitrary Lagrangian–Eulerian (ALE) method, in the form of a deformed geometry that simulates the movement of the metal plate, which effectively produces the volume modulation.
- The computational fluid dynamics (CFD) module that uses the Navier–Stokes equations for the transport of the fluid in the region where no porous material is present.
- The porous media flow that describes the transport of the fluid within the porous material.
- Additionally, an equation describing gas adsorption/desorption and its impact of pressure and transport properties is included within the porous media flow formulation.
2.1.1. Arbitrary Lagrangian–Eulerian (ALE) Method
- Spatial frame: this is the standard frame based on the Eulerian or Euclidean formulation. It remains fixed and provides a reference point for observing any movement or deformation in the generated geometry. The coordinates are described as r, phi, z.
- Material frame: this reference system follows the Lagrangian formulation. It is a local coordinate system that remains consistent even if the system undergoes deformation. For a deformed solid, the local coordinates of the material frame, R, PHI, Z, would adapt to the deformation. However, from the point of view of the spatial frame, R, PHI, Z, it would appear curvilinear.
- Geometry frame: this reference system is created from the initial geometry of the system before any movement or deformation occurs. It does not change during the simulations. The coordinates are Rg, PHIg, Zg.
- Mesh frame: this is the reference system used in computational finite element method (FEM) calculations after the geometry frame has been meshed. It is recalculated whenever there is a remeshing step or a mesh deformation. The coordinates Rm, PHIm, Zm are used to locate the different node points of the meshed structure.
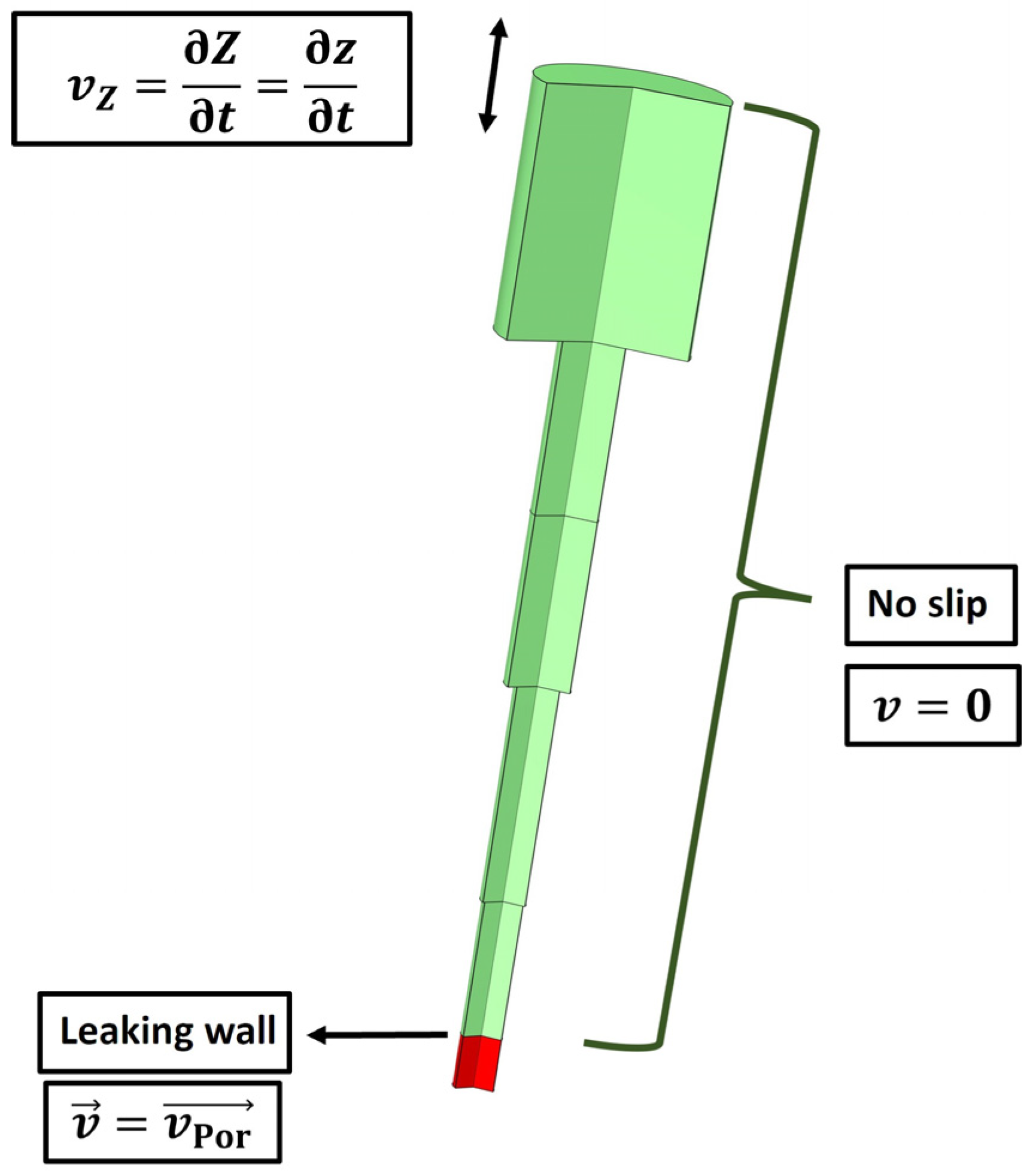
2.1.2. Computational Fluid Dynamics (CFD) Simulation for Fluid Transport
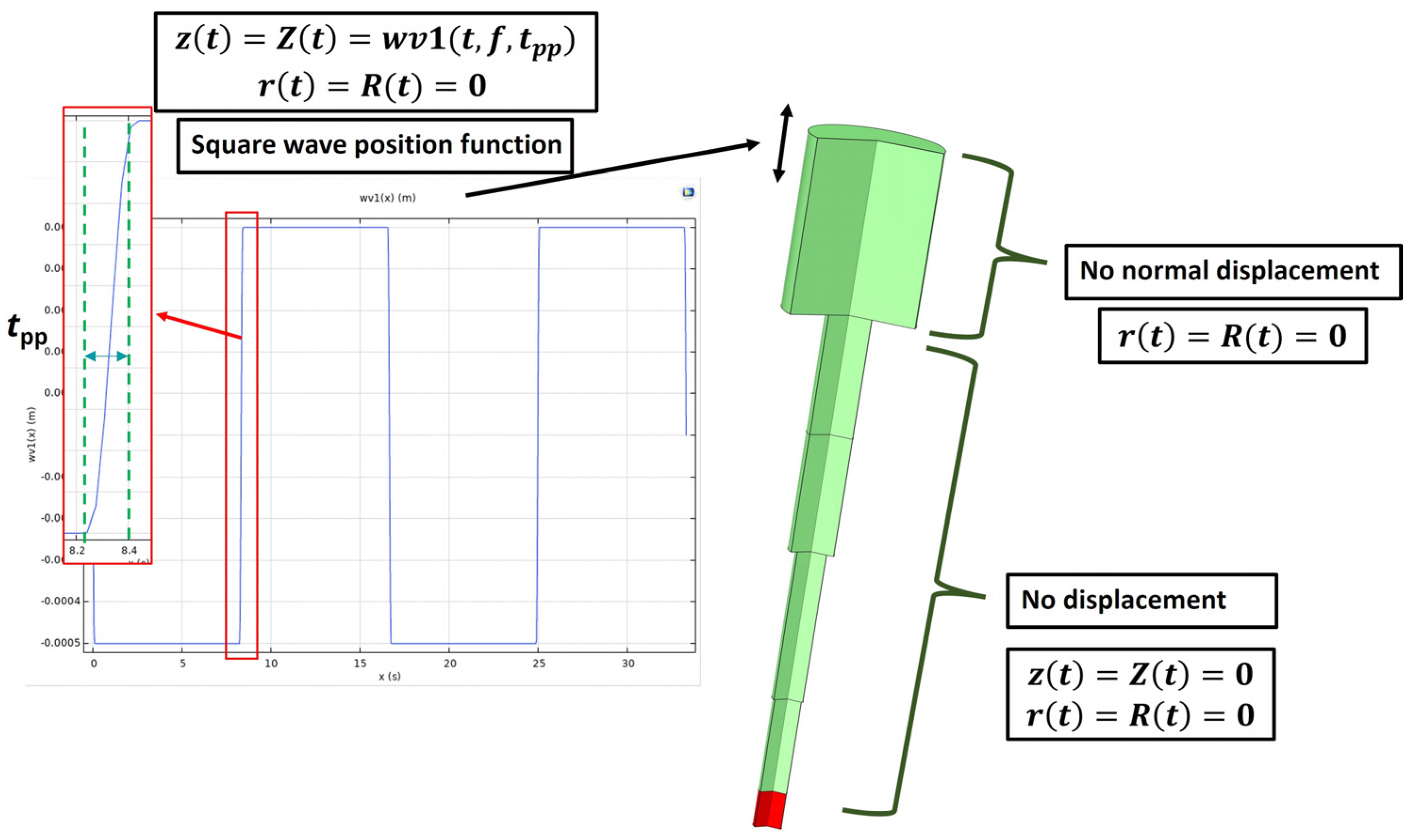
- On the top, the fluid velocity at the vertical direction, vz, is equal to the velocity of the mechanical movement of the plate (see Figure 7):
- At the device walls, a “no slip” condition is forced; in other words, the velocity of the fluid at the walls is zero (see Figure 7):
- In the general case, at the surface contact between the porous material and the gas, a coupling is completed between the CFD formulation and the Darcy’s Law physics module (suitable for low porosities). In this case, the so-called “leaking wall” boundary condition is used, where there is a fluid input or output coming from or flowing to the porous material. Under these circumstances, and as a coupling boundary condition with the porous media flow, the velocity of the gas at the wall is equal to the velocity of the fluid trespassing the barrier of the porous material, whose calculation will be detailed in the next subchapter, vPor:
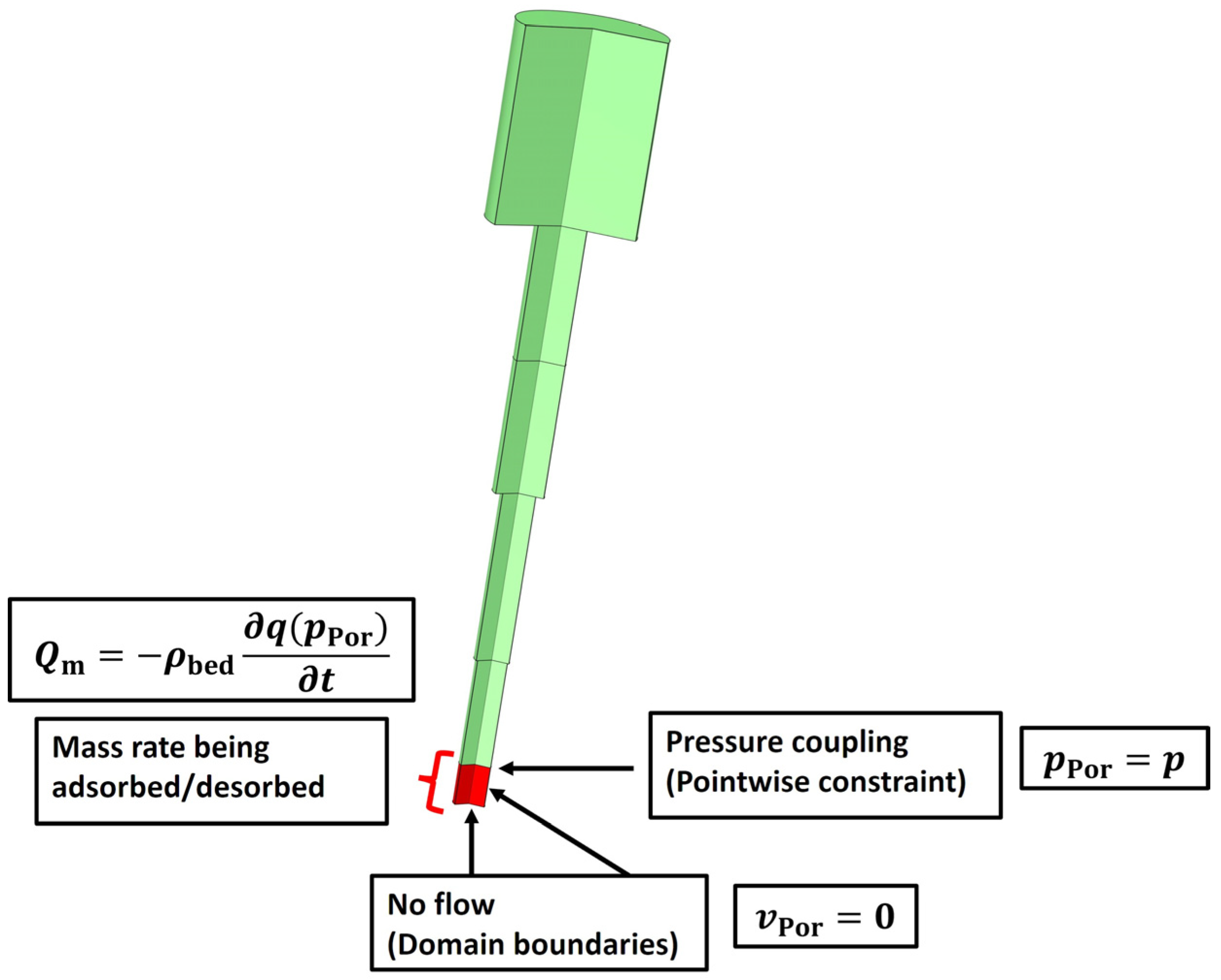
2.1.3. Porous Media Flow Simulation and Adsorption/Desorption Coupling
2.2. Simulated Zeolite Systems
2.2.1. Experimental Setup: HZSM-5/Propane
2.2.2. Silicalite-1/Methane System
2.2.3. Silicalite-1/Ethane System
2.3. Simulation Details
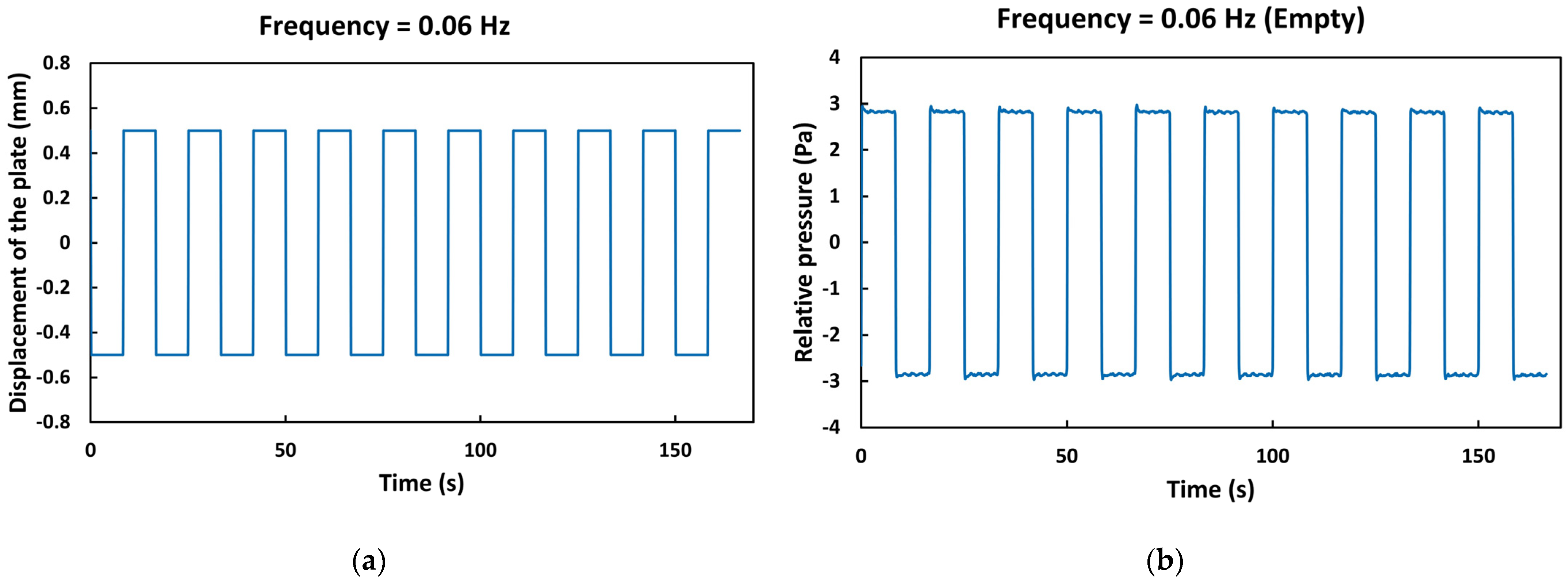
- ts,max = 0.001TF if this value is at least one order of magnitude lower than tpp. Here, tpp represents the rate of the plate movement, indicating how rapidly it changes position. This scenario is the most common one.
- If the previous condition is not met, especially during transitions from compression to expansion and vice versa, the maximum time step is progressively reduced one order of magnitude until it is at least one order of magnitude lower than tpp. If every cycle is characterized by TF, during the simulation time intervals of 0–1% TF (part of the initial compression), 49–51% TF (change from compression to expansion), and 99-100%TF (part of the compression for the next cycle), ts,max will be reduced to 0.0001TF or even lower. This adjustment was only applicable at the studied frequency of 0.06 Hz. To compensate the additional time steps, ts,max is increased to 0.01TF for the ranges that were not mentioned. This should potentially compensate the overall number of computed points.
3. Results and Discussion
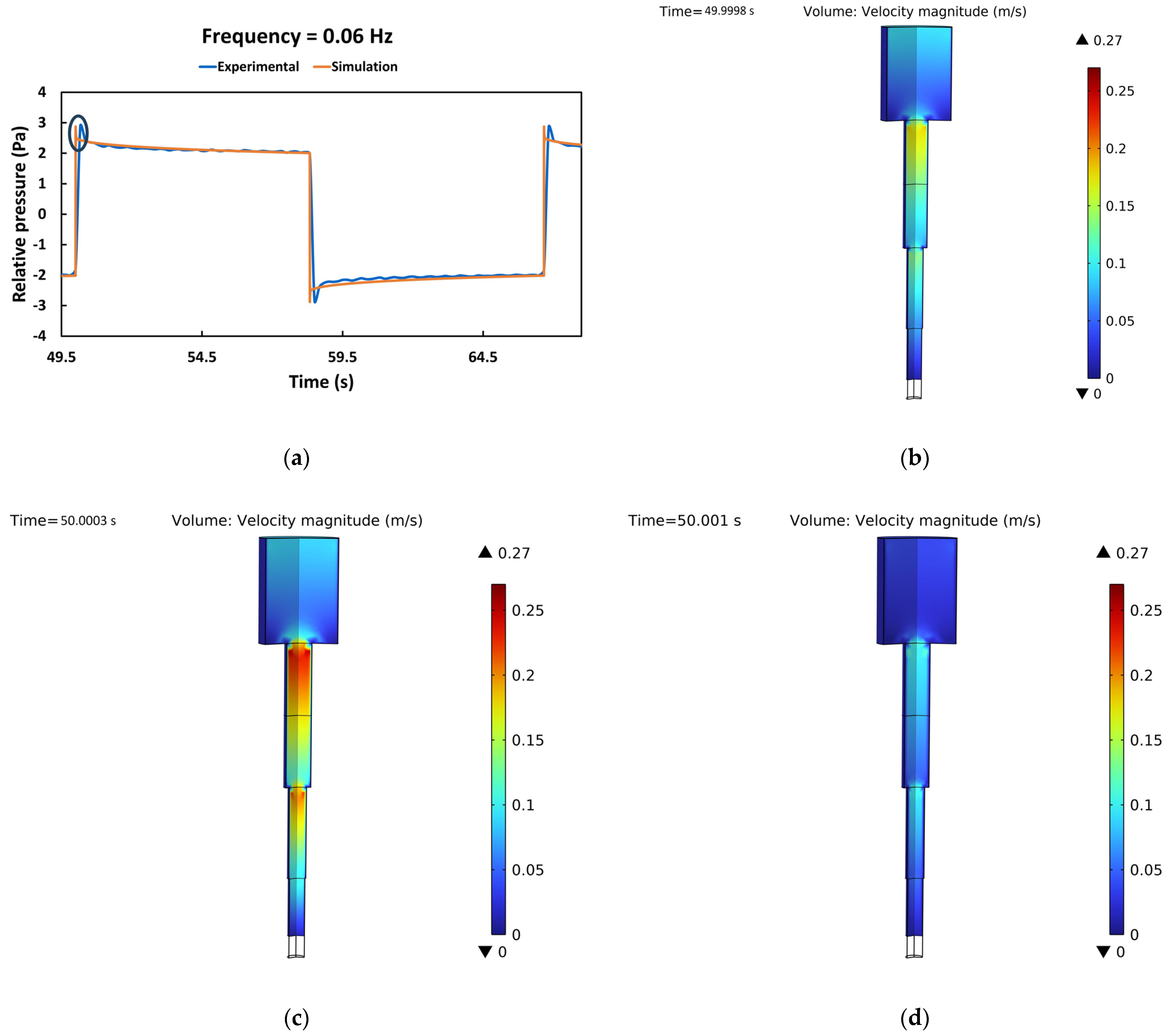
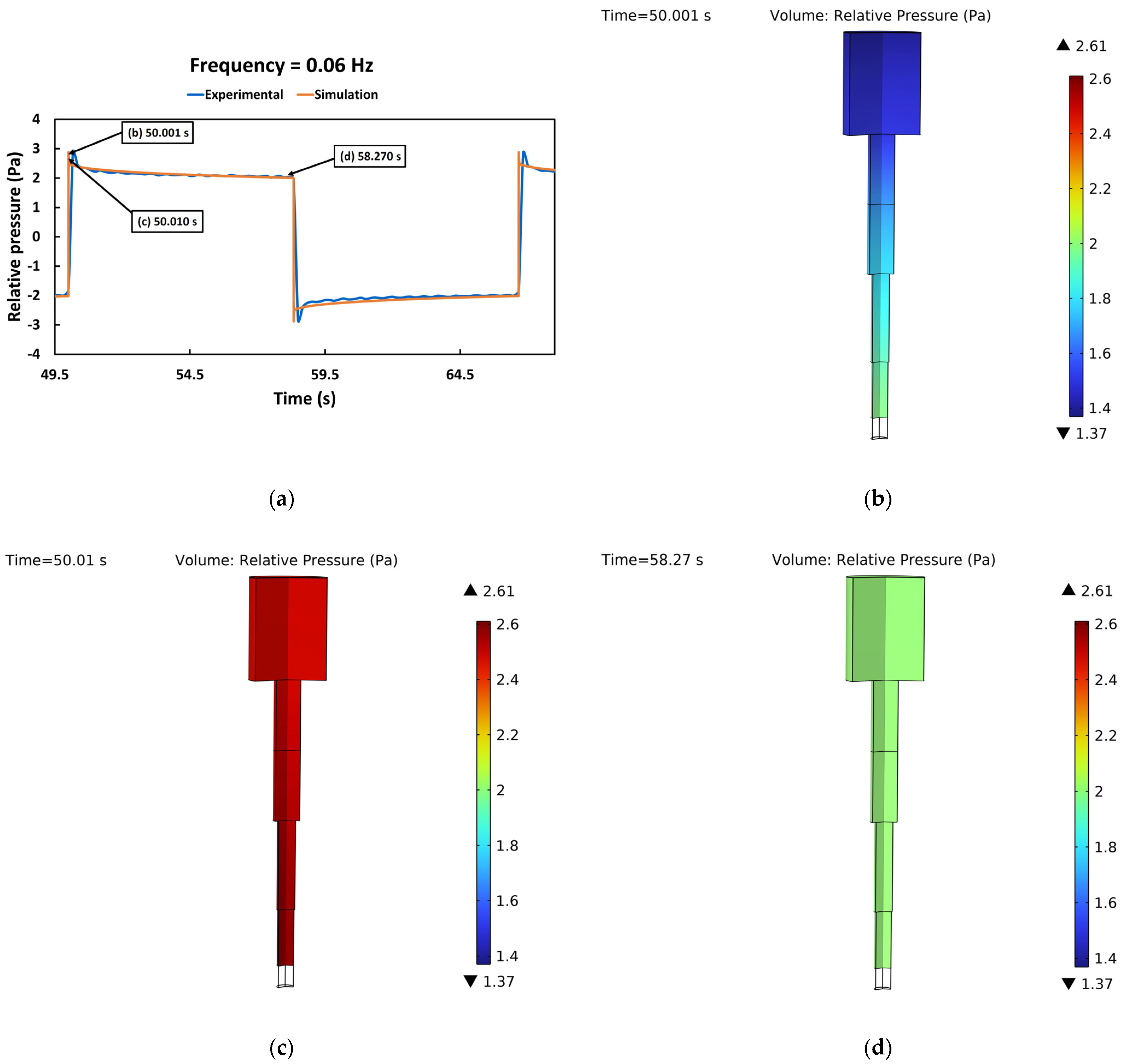
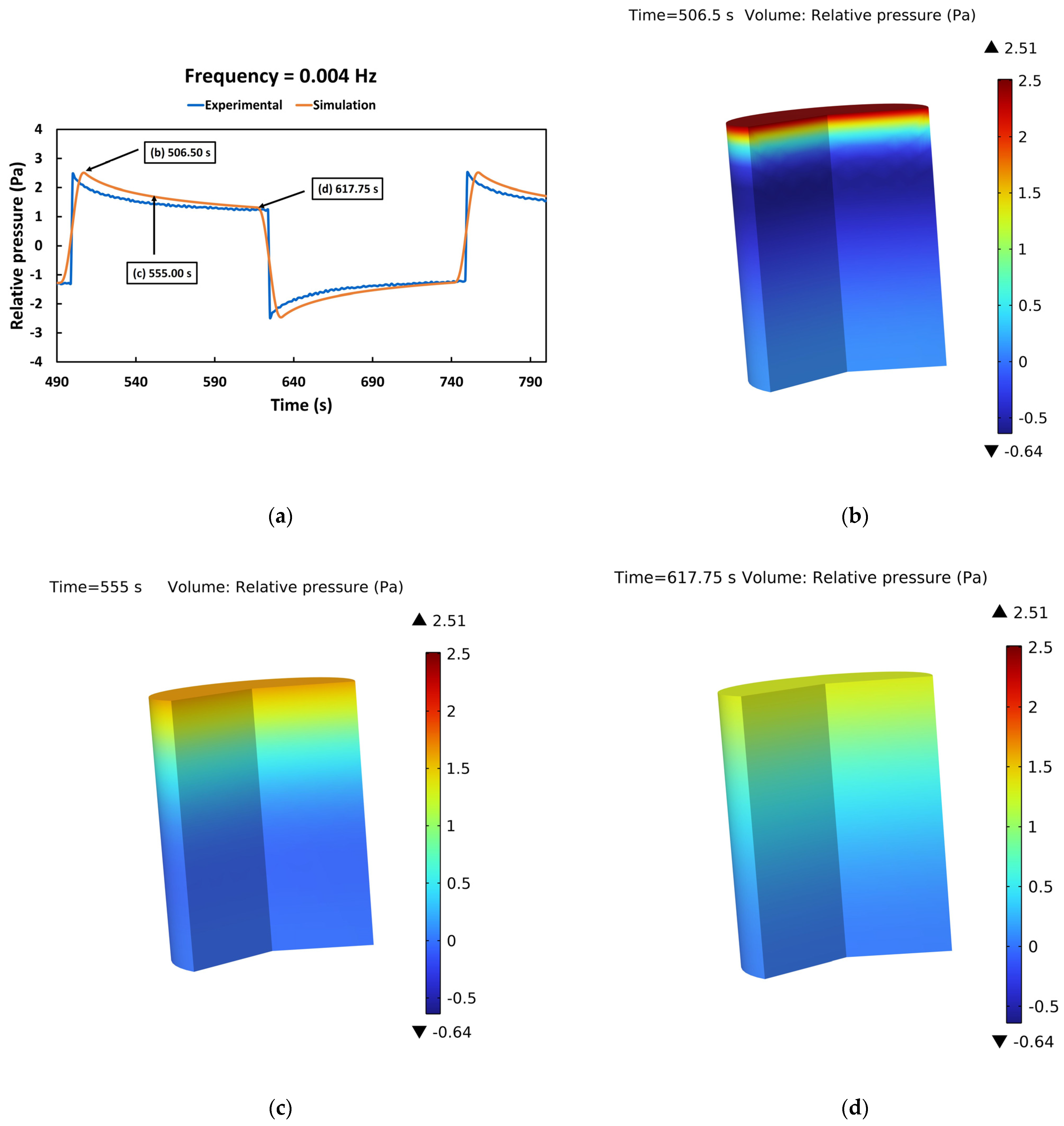
3.1. Experimental Setup: HZSM-5/Propane
3.2. Silicalite-1/Methane System
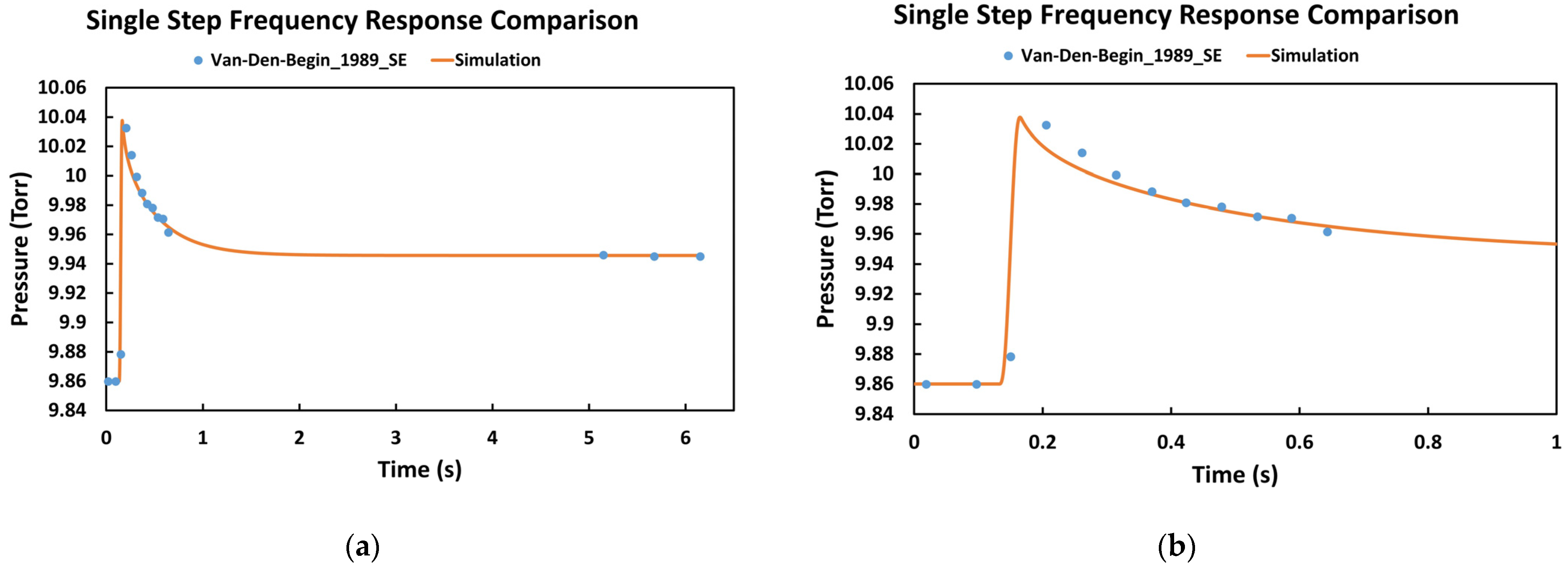
3.3. Silicalite-1/Ethane System
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Karge, H.G.; Weitkamp, J. Zeolites as Catalysts, Sorbents and Detergent Builders: Applications and Innovations; Elsevier: Amsterdam, The Netherlands, 1989; ISBN 978-0-08-088741-8. [Google Scholar]
- Karge, H.G.; Weitkamp, J. (Eds.) Adsorption and Diffusion; Molecular Sieves; Springer: Berlin/Heidelberg, Germany, 2008; ISBN 978-3-540-73965-4. [Google Scholar]
- Gleaves, J.T.; Ebner, J.R.; Kuechler, T.C. Temporal Analysis of Products (TAP)—A Unique Catalyst Evaluation System with Submillisecond Time Resolution. Catal. Rev. 1988, 30, 49–116. [Google Scholar] [CrossRef]
- Breitkopf, C. An Integrated Catalytic and Transient Study of Sulfated Zirconias: Investigation of the Reaction Mechanism and the Role of Acidic Sites in n-Butane Isomerization. ChemCatChem 2009, 1, 259–269. [Google Scholar] [CrossRef]
- Breitkopf, C. Spezielle labortechnische Reaktoren: TAP-Reaktor. In Handbuch Chemische Reaktoren: Chemische Reaktionstechnik: Theoretische und Praktische Grundlagen, Chemische Reaktionsapparate in Theorie und Praxis; Reschetilowski, W., Ed.; Springer Reference Naturwissenschaften; Springer: Berlin, Heidelberg, 2020; pp. 1321–1360. ISBN 978-3-662-56434-9. [Google Scholar]
- Breitkopf, C.; Swider-Lyons, K. (Eds.) Springer Handbook of Electrochemical Energy; Springer: Berlin/Heidelberg, Germany, 2017; ISBN 978-3-662-46656-8. [Google Scholar]
- Nguyen, T.Q.; Breitkopf, C. Determination of Diffusion Coefficients Using Impedance Spectroscopy Data. J. Electrochem. Soc. 2018, 165, E826–E831. [Google Scholar] [CrossRef]
- Yasuda, Y. Determination of Vapor Diffusion Coefficients in Zeolite by the Frequency Response Method. J. Phys. Chem. 1982, 86, 1913–1917. [Google Scholar] [CrossRef]
- Shen, D.; Rees, L.V.C. Diffusivities of Benzene in HZSM-5, Silicalite-I, and NaX Determined by Frequency-Response Techniques. Zeolites 1991, 11, 666–671. [Google Scholar] [CrossRef]
- Reyes, S.C.; Sinfelt, J.H.; DeMartin, G.J.; Ernst, R.H.; Iglesia, E. Frequency Modulation Methods for Diffusion and Adsorption Measurements in Porous Solids. J. Phys. Chem. B 1997, 101, 614–622. [Google Scholar] [CrossRef]
- Naphtali, L.M.; Polinski, L.M. A Novel Technique for Characterization of Adsorption Rates on Heterogeneous Surfaces. J. Phys. Chem. 1963, 67, 369–375. [Google Scholar] [CrossRef]
- Yasuda, Y. Frequency Response Method for Study of the Kinetic Behavior of a Gas-Surface System. 1. Theoretical Treatment. J. Phys. Chem. 1976, 80, 1867–1869. [Google Scholar] [CrossRef]
- Yasuda, Y. Frequency Response Method for Study of the Kinetic Behavior of a Gas-Surface System. 2. An Ethylene-on-Zinc Oxide System. J. Phys. Chem. 1976, 80, 1870–1875. [Google Scholar] [CrossRef]
- Song, L.; Rees, L.V. Frequency Response Measurements of Diffusion in Microporous Materials. In Adsorption and Diffusion; Springer: Berlin/Heidelberg, Germany, 2007; pp. 235–276. [Google Scholar]
- Song, L.; Rees, L.V.C. Adsorption and Transport of N-Hexane in Silicalite-1 by the Frequency Response Technique. Faraday Trans. 1997, 93, 649–657. [Google Scholar] [CrossRef]
- Yasuda, Y.; Suzuki, Y.; Fukada, H. Kinetic Details of a Gas/Porous Adsorbent System by the Frequency Response Method. J. Phys. Chem. 1991, 95, 2486–2492. [Google Scholar] [CrossRef]
- Jordi, R.G.; Do, D.D. Frequency-Response Analysis of Sorption in Zeolite Crystals with Finite Intracrystal Reversible Mass Exchange. J. Chem. Soc. Faraday Trans. 1992, 88, 2411–2419. [Google Scholar] [CrossRef]
- Rees, L.V.C.; Shen, D. Characterization of Microporous Sorbents by Frequency-Response Methods. Gas Sep. Purif. 1993, 7, 83–89. [Google Scholar] [CrossRef]
- Bourdin, V.; Gray, P.G.; Grenier, P.; Terrier, M.F. An Apparatus for Adsorption Dynamics Studies Using Infrared Measurement of the Adsorbent Temperature. Rev. Sci. Instrum. 1998, 69, 2130–2136. [Google Scholar] [CrossRef]
- Van-Den-Begin, N.; Rees, L.V.C.; Caro, J.; Bülow, M.; Hunger, M.; Kärger, J. Diffusion of Ethane in Silicalite-1 by Frequency Response, Sorption Uptake and Nuclear Magnetic Resonance Techniques. J. Chem. Soc. Faraday Trans. 1989, 85, 1501–1509. [Google Scholar] [CrossRef]
- Van-Den-Begin, N.; Rees, L.V.C.; Caro, J.; Bülow, M. Fast Adsorption-Desorption Kinetics of Hydrocarbons in Silicalite-1 by the Single-Step Frequency Response Method. Zeolites 1989, 9, 287–292. [Google Scholar] [CrossRef]
- Song, L.; Rees, L.V.C. Adsorption and Diffusion of Cyclic Hydrocarbon in MFI-Type Zeolites Studied by Gravimetric and Frequency-Response Techniques. Microporous Mesoporous Mater. 2000, 35, 301–314. [Google Scholar] [CrossRef]
- Valyon, J.; Onyestyák, G.; Rees, L.V.C. A Frequency-Response Study of the Diffusion and Sorption Dynamics of Ammonia in Zeolites. Langmuir 2000, 16, 1331–1336. [Google Scholar] [CrossRef]
- Grün, R.; Pan, F.; Grau Turuelo, C.; Breitkopf, C. Transient Studies of Gas Transport in Porous Solids Using Frequency Response Method—A Conceptual Study. Catal. Today 2023, 417, 113838. [Google Scholar] [CrossRef]
- Stein, E.; Borst, R.d.; Hughes, T.J.R. Encyclopedia of Computational Mechanics Volume 1 Fundamentals, Part 1, 2nd ed.; Wiley: Chichester, UK, 2018. [Google Scholar] [CrossRef]
- Bosma, T. Levelset Based Fluid-Structure Interaction Modeling with the eXtended Finite Element Method. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2013. [Google Scholar]
- Bruchon, J.; Digonnet, H.; Coupez, T. Using a Signed Distance Function for the Simulation of Metal Forming Processes: Formulation of the Contact Condition and Mesh Adaptation. From a Lagrangian Approach to an Eulerian Approach. Int. J. Numer. Methods Eng. 2009, 78, 980–1008. [Google Scholar] [CrossRef]
- COMSOL. Multiphysics Reference Manual, Version 6.1, COMSOL, Inc. Available online: www.comsol.com (accessed on 15 July 2023).
- Rao, K.S.; Sravani, K.G.; Yugandhar, G.; Rao, G.V.; Mani, V.N. Design and Analysis of Fluid Structure Interaction in a Horizontal Micro Channel. Procedia Mater. Sci. 2015, 10, 768–788. [Google Scholar] [CrossRef]
- Maruthavanan, D.; Seibel, A.; Schlattmann, J. Fluid-Structure Interaction Modelling of a Soft Pneumatic Actuator. Actuators 2021, 10, 163. [Google Scholar] [CrossRef]
- Silva, K.E.S.; Sivapuram, R.; Ranjbarzadeh, S.; Gioria, R.S.; Silva, E.C.N.; Picelli, R. Topology Optimization of Stationary Fluid–Structure Interaction Problems Including Large Displacements via the TOBS-GT Method. Struct. Multidiscip. Optim. 2022, 65, 337. [Google Scholar] [CrossRef]
- Ivanov, A.; Kovacs, A.; Mescheder, U. High Quality 3D Shapes by Silicon Anodization. Phys. Status Solidi A 2011, 208, 1383–1388. [Google Scholar] [CrossRef]
- Smallwood, D.C.; McCloskey, P.; Rohan, J.F. Multiphysics Design and Fabrication of 3D Electroplated VIA Materials Topographies for next Generation Energy and Sensor Technologies. Mater. Des. 2022, 221, 111001. [Google Scholar] [CrossRef]
- Waltz, J.; Morgan, N.R.; Canfield, T.R.; Charest, M.R.J.; Risinger, L.D.; Wohlbier, J.G. A Three-Dimensional Finite Element Arbitrary Lagrangian–Eulerian Method for Shock Hydrodynamics on Unstructured Grids. Comput. Fluids 2014, 92, 172–187. [Google Scholar] [CrossRef]
- Löhner, R.; Yang, C. Improved ALE Mesh Velocities for Moving Bodies. Commun. Numer. Methods Eng. 1996, 12, 599–608. [Google Scholar] [CrossRef]
- Zreid, I.; Behnke, R.; Kaliske, M. ALE Formulation for Thermomechanical Inelastic Material Models Applied to Tire Forming and Curing Simulations. Comput. Mech. 2021, 67, 1543–1557. [Google Scholar] [CrossRef]
- Lin, P.T.; Baker, T.J.; Martinelli, L.; Jameson, A. Two-Dimensional Implicit Time-Dependent Calculations on Adaptive Unstructured Meshes with Time Evolving Boundaries. Int. J. Numer. Methods Fluids 2006, 50, 199–218. [Google Scholar] [CrossRef]
- Filipovic, N.; Mijailovic, S.; Tsuda, A.; Kojic, M. An Implicit Algorithm within the Arbitrary Lagrangian–Eulerian Formulation for Solving Incompressible Fluid Flow with Large Boundary Motions. Comput. Methods Appl. Mech. Eng. 2006, 195, 6347–6361. [Google Scholar] [CrossRef]
- Winslow, A.M. “‘Equipotential’” Zoning of Two-Dimensional Meshes; California University, Lawrence Livermore Lab: Livermore, CA, USA, 1963. [Google Scholar]
- Winslow, A.M. Numerical Solution of the Quasilinear Poisson Equation in a Nonuniform Triangle Mesh. J. Comput. Phys. 1966, 1, 149–172. [Google Scholar] [CrossRef]
- Winslow, A.M.; Barton, R.T. Rescaling of Equipotential Smoothing; Lawrence Livermore National Lab. (LLNL): Livermore, CA, USA, 1982. [Google Scholar]
- Donea, J.; Huerta, A.; Ponthot, J.-P.; Rodríguez-Ferran, A. Arbitrary Lagrangian–Eulerian Methods. In Encyclopedia of Computational Mechanics; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2004; ISBN 978-0-470-09135-7. [Google Scholar]
- Maire, P.-H.; De Buhan, M.; Diaz, A.; Dobrzynski, C.; Kluth, G.; Lagoutière, F. A Cell-Centered Arbitrary Lagrangian Eulerian (ALE) Method for Multi-Material Compressible Flows. ESAIM: Proc. 2008, 24, 1–13. [Google Scholar] [CrossRef]
- Liu, W.K.; Chen, J.-S.; Belytschko, T.; Zhang, Y.F. Adaptive ALE Finite Elements with Particular Reference to External Work Rate on Frictional Interface. Comput. Methods Appl. Mech. Eng. 1991, 93, 189–216. [Google Scholar] [CrossRef]
- Mokbel, M.; Aland, S. An ALE Method for Simulations of Axisymmetric Elastic Surfaces in Flow. Int. J. Numer. Methods Fluids 2020, 92, 1604–1625. [Google Scholar] [CrossRef]
- Matsushima, K.; Murayama, M.; Nakahashi, K. Unstructured Dynamic Mesh for Large Movement and Deformation. In Proceedings of the 40th AIAA Aerospace Sciences Meeting & Exhibit; Aerospace Sciences Meetings, Reno, NV, USA, 14–17 January 2002. [Google Scholar]
- Tonon, P.; Sanches, R.A.K.; Takizawa, K.; Tezduyar, T.E. A Linear-Elasticity-Based Mesh Moving Method with No Cycle-to-Cycle Accumulated Distortion. Comput. Mech. 2021, 67, 413–434. [Google Scholar] [CrossRef]
- Stein, K.; Tezduyar, T. Advanced Mesh Update Techniques for Problems Involving Large Displacements. In Proceedings of the Fifth World Congress on Computational Mechanics, Wienna, Austria, 7–12 July 2002. [Google Scholar]
- Stein, K.; Tezduyar, T.; Benney, R. Mesh Moving Techniques for Fluid-Structure Interactions With Large Displacements. J. Appl. Mech. 2003, 70, 58–63. [Google Scholar] [CrossRef]
- Rodríguez-Ferran, A.; Pérez-Foguet, A.; Huerta, A. Arbitrary Lagrangian-Eulerian (ALE) Formulation for Hyperelastoplasticity. Int. J. Numer. Methods Eng. 2002, 53, 1831–1851. [Google Scholar] [CrossRef]
- Yamada, T.; Kikuchi, F. An Arbitrary Lagrangian-Eulerian Finite Element Method for Incompressible Hyperelasticity. Comput. Methods Appl. Mech. Eng. 1993, 102, 149–177. [Google Scholar] [CrossRef]
- Renaud, C.; Cros, J.-M.; Feng, Z.-Q.; Yang, B. The Yeoh Model Applied to the Modeling of Large Deformation Contact/Impact Problems. Int. J. Impact Eng. 2009, 36, 659–666. [Google Scholar] [CrossRef]
- Hossain, M.I.; Holland, C.E.; Ebner, A.D.; Ritter, J.A. 110th Anniversary: New Volumetric Frequency Response System for Determining Mass Transfer Mechanisms in Microporous Adsorbents. Ind. Eng. Chem. Res. 2019, 58, 17462–17474. [Google Scholar] [CrossRef]
- Van-Den-Begin, N.G.; Rees, L.V.C. Diffusion of Hydrocarbons in Silicalite Using a Frequency-Response Method. In Studies in Surface Science and Catalysis; Elsevier: Amsterdam, The Netherlands, 1989; Volume 49, pp. 915–924. ISBN 978-0-444-87466-5. [Google Scholar]
- Bear, J. Hydraulics of Groundwater; Courier Corporation: Chelmsford, MA, USA, 2012; ISBN 978-0-486-13616-5. [Google Scholar]
- Kim, S.; Russel, W.B. Modelling of Porous Media by Renormalization of the Stokes Equations. J. Fluid Mech. 1985, 154, 269–286. [Google Scholar] [CrossRef]
- Stewart, J. Calculus: Early Transcendentals; Textbooks Available with Cengage Youbook; Cengage Learning: Boston, MA, USA, 2010; ISBN 978-0-538-49790-9. [Google Scholar]
- Liu, X.; Gui, N.; Wu, H.; Yang, X.; Tu, J.; Jiang, S. Numerical Simulation of Flow Past Stationary and Oscillating Deformable Circles with Fluid-Structure Interaction. Exp. Comput. Multiph. Flow 2020, 2, 151–161. [Google Scholar] [CrossRef]
- Duarte, F.; Gormaz, R.; Natesan, S. Arbitrary Lagrangian–Eulerian Method for Navier–Stokes Equations with Moving Boundaries. Comput. Methods Appl. Mech. Eng. 2004, 193, 4819–4836. [Google Scholar] [CrossRef]
- Liu, W.K.; Herman, C.; Jiun-Shyan, C.; Ted, B. Arbitrary Lagrangian-Eulerian Petrov-Galerkin Finite Elements for Nonlinear Continua. Comput. Methods Appl. Mech. Eng. 1988, 68, 259–310. [Google Scholar] [CrossRef]
- Donea, J.; Giuliani, S.; Halleux, J.P. An Arbitrary Lagrangian-Eulerian Finite Element Method for Transient Dynamic Fluid-Structure Interactions. Comput. Methods Appl. Mech. Eng. 1982, 33, 689–723. [Google Scholar] [CrossRef]
- Benson, D.J. An Efficient, Accurate, Simple Ale Method for Nonlinear Finite Element Programs. Comput. Methods Appl. Mech. Eng. 1989, 72, 305–350. [Google Scholar] [CrossRef]
- Stokes, G.G. (Ed.) On the Theories of the Internal Friction of Fluids in Motion, and of the Equilibrium and Motion of Elastic Solids. In Mathematical and Physical Papers; Cambridge Library Collection—Mathematics; Cambridge University Press: Cambridge, UK, 2009; Volume 1, pp. 75–129. ISBN 978-1-108-00262-2. [Google Scholar]
- Kim, S.; Karrila, S.J. Microhydrodynamics: Principles and Selected Applications; Courier Corporation: Boston, MA, USA, 2013. [Google Scholar]
- Happel, J.; Brenner, H. Low Reynolds Number Hydrodynamics: With Special Applications to Particulate Media; Mechanics of Fluids and Transport Processes; Springer Netherlands: Dordrecht, The Netherlands, 1983; Volume 1, ISBN 978-90-247-2877-0. [Google Scholar]
- Bear, J. Dynamics of Fluids in Porous Media; Courier Corporation: Boston, MA, USA, 2013; ISBN 978-0-486-13180-1. [Google Scholar]
- Le Bars, M.; Worster, M.G. Interfacial Conditions between a Pure Fluid and a Porous Medium: Implications for Binary Alloy Solidification. J. Fluid Mech. 2006, 550, 149–173. [Google Scholar] [CrossRef]
- Nield, D.A.; Bejan, A. Convection in Porous Media; Springer International Publishing: Cham, Switzerland, 2017; ISBN 978-3-319-49561-3. [Google Scholar]
- Nield, D.A. The Limitations of the Brinkman-Forchheimer Equation in Modeling Flow in a Saturated Porous Medium and at an Interface. Int. J. Heat Fluid Flow 1991, 12, 269–272. [Google Scholar] [CrossRef]
- Lundgren, T.S. Slow Flow through Stationary Random Beds and Suspensions of Spheres. J. Fluid Mech. 1972, 51, 273–299. [Google Scholar] [CrossRef]
- Durlofsky, L.; Brady, J.F. Analysis of the Brinkman Equation as a Model for Flow in Porous Media. Phys. Fluids 1987, 30, 3329–3341. [Google Scholar] [CrossRef]
- Kalam, S.; Abu-Khamsin, S.A.; Kamal, M.S.; Patil, S. Surfactant Adsorption Isotherms: A Review. ACS Omega 2021, 6, 32342–32348. [Google Scholar] [CrossRef] [PubMed]
- Eder, F.; Stockenhuber, M.; Lercher, J.A. Sorption of Light Alkanes on H-ZSM5 and H-Mordenite. Stud. Surf. Sci. Catal. 1995, 97, 495–500. [Google Scholar] [CrossRef]
- Eder, F.; Lercher, J.A. On the Role of the Pore Size and Tortuosity for Sorption of Alkanes in Molecular Sieves. J. Phys. Chem. B 1997, 101, 1273–1278. [Google Scholar] [CrossRef]
- Carman, P.C. Flow of Gases through Porous Media; Butterworths Scientific Publications: London, UK, 1956. [Google Scholar]
- Carman, P.C. Fluid Flow through Granular Beds. Chem. Eng. Res. Des. 1997, 75, S32–S48. [Google Scholar] [CrossRef]
- Friend, D.G.; Ely, J.F.; Ingham, H. Thermophysical Properties of Methane. J. Phys. Chem. Ref. Data 1989, 18, 583–638. [Google Scholar] [CrossRef]
- Yang, J.; Li, J.; Wang, W.; Li, L.; Li, J. Adsorption of CO2, CH4, and N2 on 8-, 10-, and 12-Membered Ring Hydrophobic Microporous High-Silica Zeolites: DDR, Silicalite-1, and Beta. Ind. Eng. Chem. Res. 2013, 52, 17856–17864. [Google Scholar] [CrossRef]
- Karger, J.; Pfeifer, H.; Freude, D.; Caro, J.; Bulow, M.; Ohlmann, G. New Developments in Zeolite Science and Technology. In Surface Science and Catalysis, Proceedings of the 7th International Zeolite Conference, Tokyo, Japan, 17–22 August 1986; Kodansha: Tokyo, Japan; Elsevier: Amsterdam, The Netherlands, 1986; Volume 28, p. 633. [Google Scholar]
- Friend, D.G.; Ingham, H.; Fly, J.F. Thermophysical Properties of Ethane. J. Phys. Chem. Ref. Data 1991, 20, 275–347. [Google Scholar] [CrossRef]
- Dunne, J.A.; Mariwala, R.; Rao, M.; Sircar, S.; Gorte, R.J.; Myers, A.L. Calorimetric Heats of Adsorption and Adsorption Isotherms. 1. O2, N2, Ar, CO2, CH4, C2H6, and SF6 on Silicalite. Langmuir 1996, 12, 5888–5895. [Google Scholar] [CrossRef]
- Hindmarsh, A.C.; Brown, P.N.; Grant, K.E.; Lee, S.L.; Serban, R.; Shumaker, D.E.; Woodward, C.S. SUNDIALS: Suite of Nonlinear and Differential/Algebraic Equation Solvers. ACM Trans. Math. Softw. 2005, 31, 363–396. [Google Scholar] [CrossRef]
- Brown, P.N.; Hindmarsh, A.C.; Petzold, L.R. Using Krylov Methods in the Solution of Large-Scale Differential-Algebraic Systems. SIAM J. Sci. Comput. 1994, 15, 1467–1488. [Google Scholar] [CrossRef]
- Zorrilla, R.; Rossi, R.; Wüchner, R.; Oñate, E. An Embedded Finite Element Framework for the Resolution of Strongly Coupled Fluid–Structure Interaction Problems. Application to Volumetric and Membrane-like Structures. Comput. Methods Appl. Mech. Eng. 2020, 368, 113179. [Google Scholar] [CrossRef]
- Rossi, R.; Ryzhakov, P.B.; Oñate, E. A Monolithic FE Formulation for the Analysis of Membranes in Fluids. Int. J. Space Struct. 2009, 24, 205–210. [Google Scholar] [CrossRef]
- Degroote, J.; Bathe, K.-J.; Vierendeels, J. Performance of a New Partitioned Procedure versus a Monolithic Procedure in Fluid–Structure Interaction. Comput. Struct. 2009, 87, 793–801. [Google Scholar] [CrossRef]
- Failer, L.; Richter, T. A Parallel Newton Multigrid Framework for Monolithic Fluid-Structure Interactions. J. Sci. Comput. 2020, 82, 28. [Google Scholar] [CrossRef]
- Langer, U.; Neumüller, M. Direct and Iterative Solvers. In Computational Acoustics; Kaltenbacher, M., Ed.; CISM International Centre for Mechanical Sciences; Springer International Publishing: Cham, Switzerland, 2018; Volume 579, pp. 205–251. ISBN 978-3-319-59037-0. [Google Scholar]
- Press, W.H.; Flannery, B.P.; Teukolsky, S.A.; Vetterling, W.T. Numerical Recipes in FORTRAN 77: Volume 1, Volume 1 of Fortran Numerical Recipes: The Art of Scientific Computing; Cambridge University Press: Cambridge, UK, 1992; ISBN 978-0-521-43064-7. [Google Scholar]
- Greenbaum, A. Iterative Methods for Solving Linear Systems; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 1997. [Google Scholar] [CrossRef]
- Amestoy, P.R.; Duff, I.S.; Koster, J.; L’Excellent, J.-Y. A Fully Asynchronous Multifrontal Solver Using Distributed Dynamic Scheduling. SIAM J. Matrix Anal. Appl. 2001, 23, 15–41. [Google Scholar] [CrossRef]
- Amestoy, P.R.; Guermouche, A.; L’Excellent, J.-Y.; Pralet, S. Hybrid Scheduling for the Parallel Solution of Linear Systems. Parallel Comput. 2006, 32, 136–156. [Google Scholar] [CrossRef]
- Crank, J. The Mathematics of Diffusion, 2d ed.; Clarendon Press: Oxford, UK, 1975; ISBN 978-0-19-853344-3. [Google Scholar]
- Kärger, J.; Ruthven, D.M. Diffusion in Zeolites and Other Microporous Solids; Wiley: New York, NY, USA, 1992; ISBN 978-0-471-50907-3. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experimental Frequency | 0.002 Hz | 0.004 Hz | 0.008 Hz | 0.06 Hz |
|---|---|---|---|---|
| Particle dry density, ρD | 419.93 kg/m3 | 421.94 kg/m3 | 423.95 kg/m3 | 417.92 kg/m3 |
| Bed porosity, εP | 0.0431 | 0.0476 | 0.0521 | 0.0385 |
| Time peak-to-peak, tpp | 45 s | 17 s | 6.5 s | 3.2 ms |
| Mass, msample | Bed Density, ρbed | Bed Porosity, εP | Time Peak-to-Peak, tpp |
|---|---|---|---|
| 0.116 g | 1601.6 kg/m3 | 0.09 | 28 ms |
| Mass, msample | Bed Density, ρbed | Bed Porosity, εP | Time Peak-to-Peak, tpp |
|---|---|---|---|
| 0.81 g | 880 kg/m3 | 0.5 | 35 ms |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Grau Turuelo, C.; Grün, R.; Breitkopf, C. Simulation of the Frequency Response Analysis of Gas Diffusion in Zeolites by Means of Computational Fluid Dynamics. Minerals 2023, 13, 1238. https://doi.org/10.3390/min13101238
Grau Turuelo C, Grün R, Breitkopf C. Simulation of the Frequency Response Analysis of Gas Diffusion in Zeolites by Means of Computational Fluid Dynamics. Minerals. 2023; 13(10):1238. https://doi.org/10.3390/min13101238
Chicago/Turabian StyleGrau Turuelo, Constantino, Rebecca Grün, and Cornelia Breitkopf. 2023. "Simulation of the Frequency Response Analysis of Gas Diffusion in Zeolites by Means of Computational Fluid Dynamics" Minerals 13, no. 10: 1238. https://doi.org/10.3390/min13101238