
Study on the Aeromagnetic System between Fixed-Wing UAV and Unmanned Helicopter


Abstract
:1. Introduction
2. UAV Aeromagnetic System
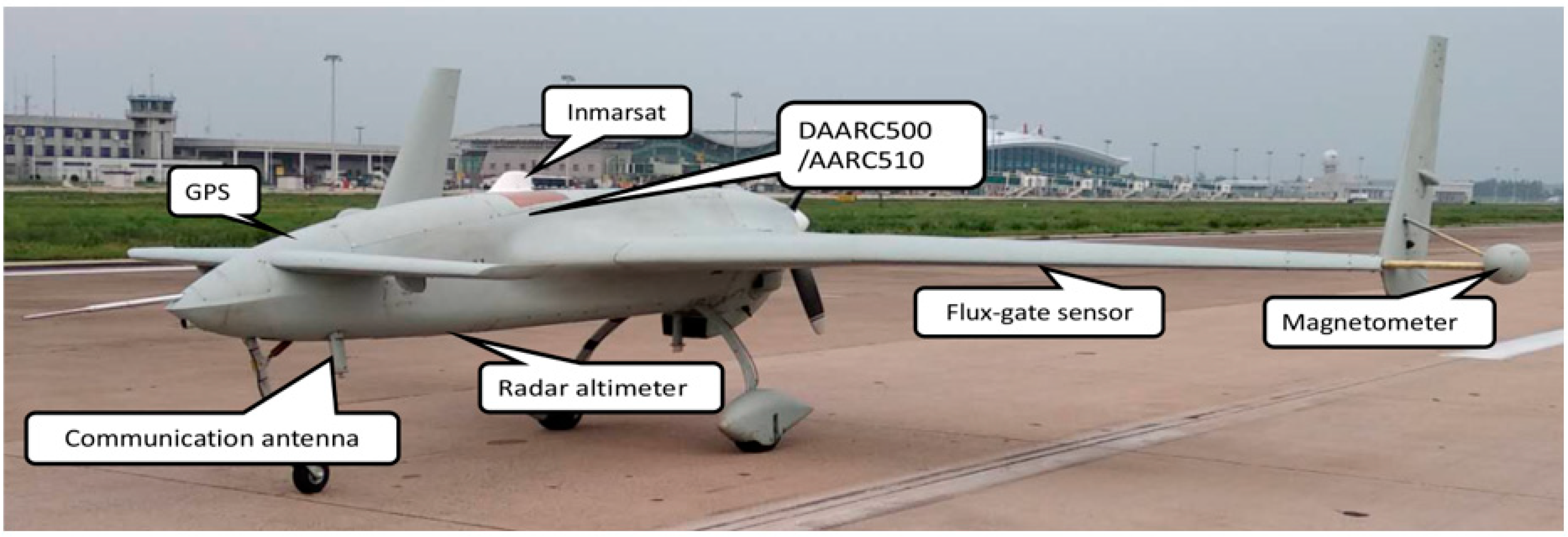
2.1. FUAV Aeromagnetic System
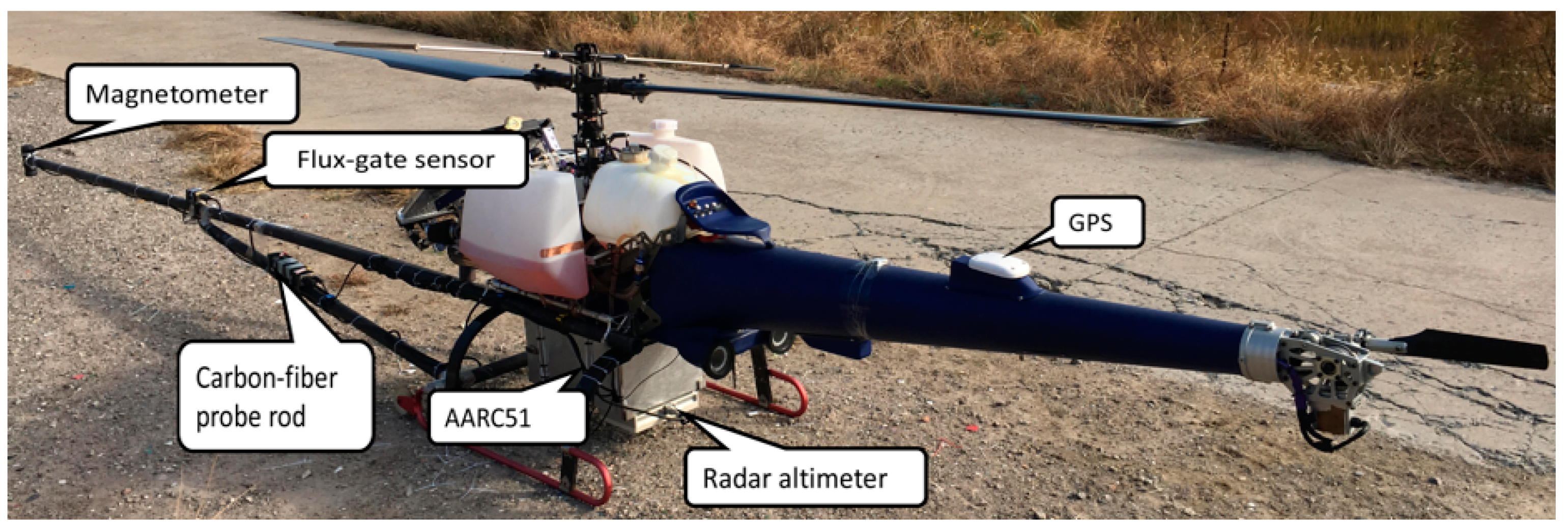
2.2. MUH Aeromagnetic System
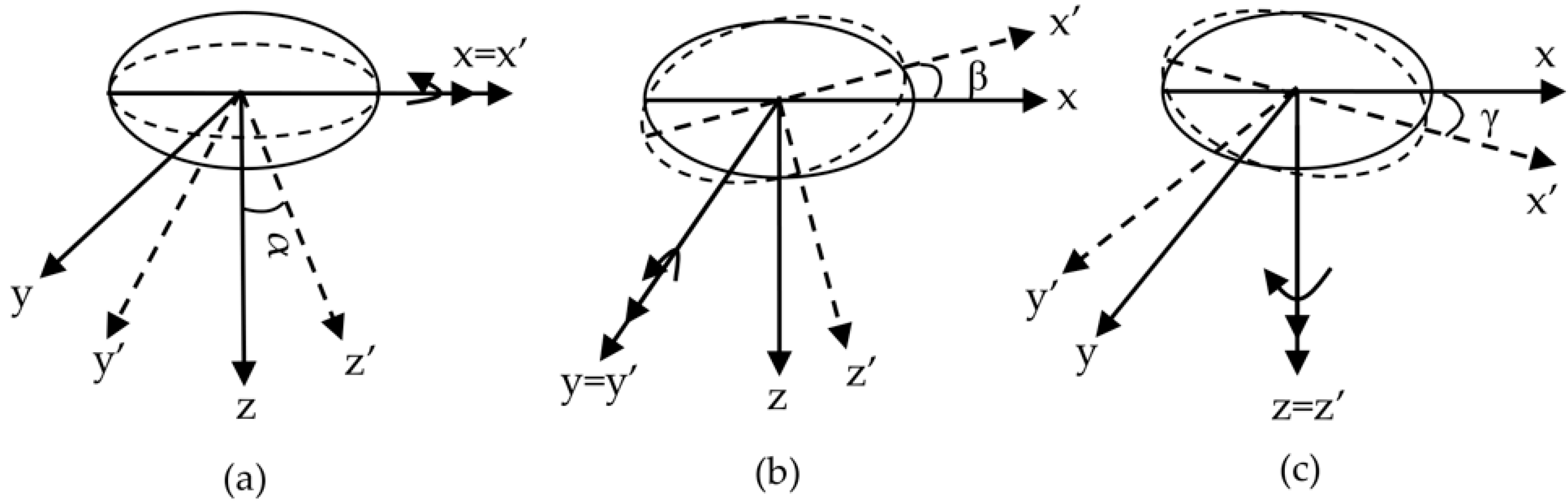
3. Aeromagnetic Compensation
3.1. FUAV Aeromagnetic System
3.2. MUH Aeromagnetic System
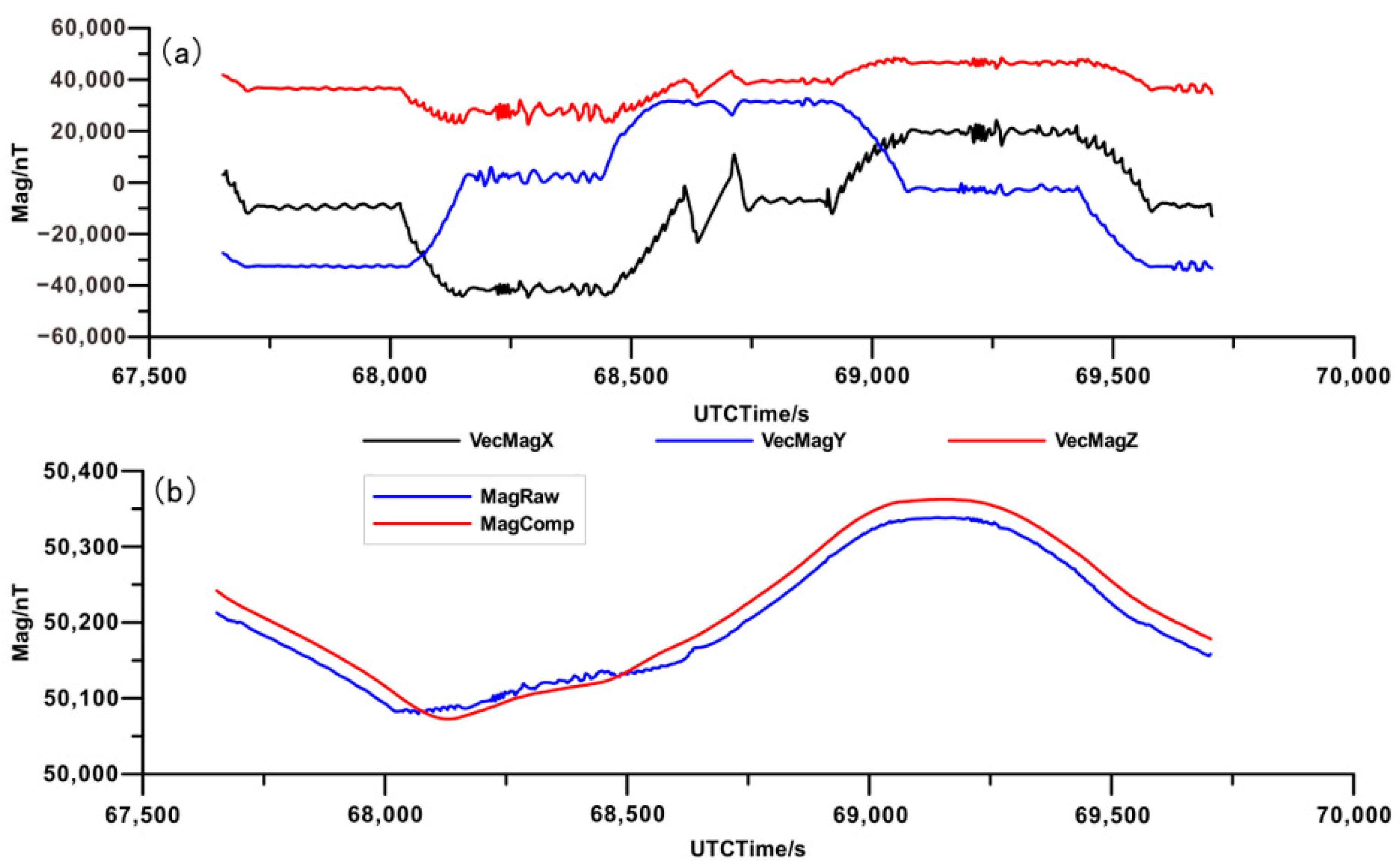
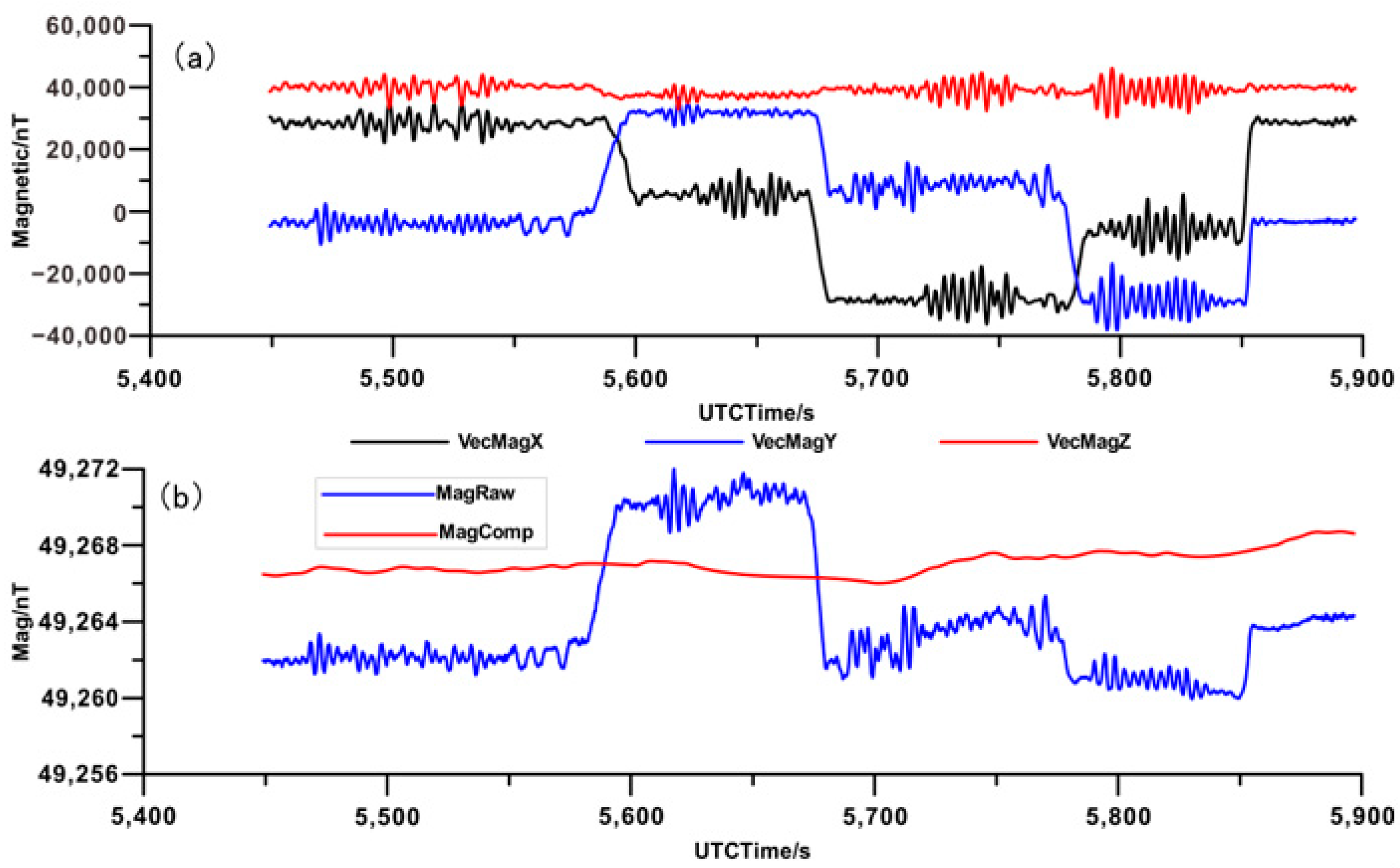
3.3. Aeromagnetic Compensation Test
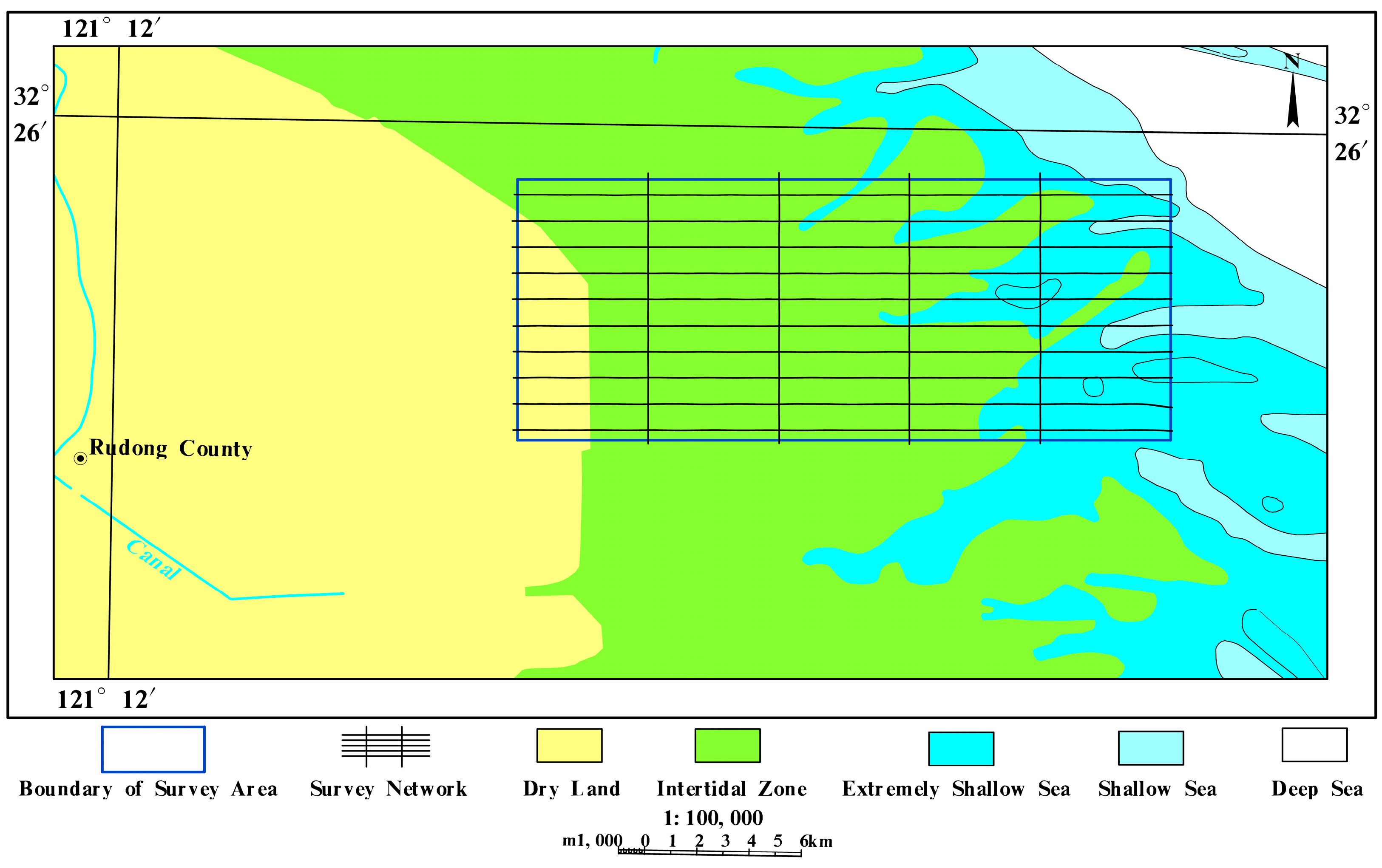
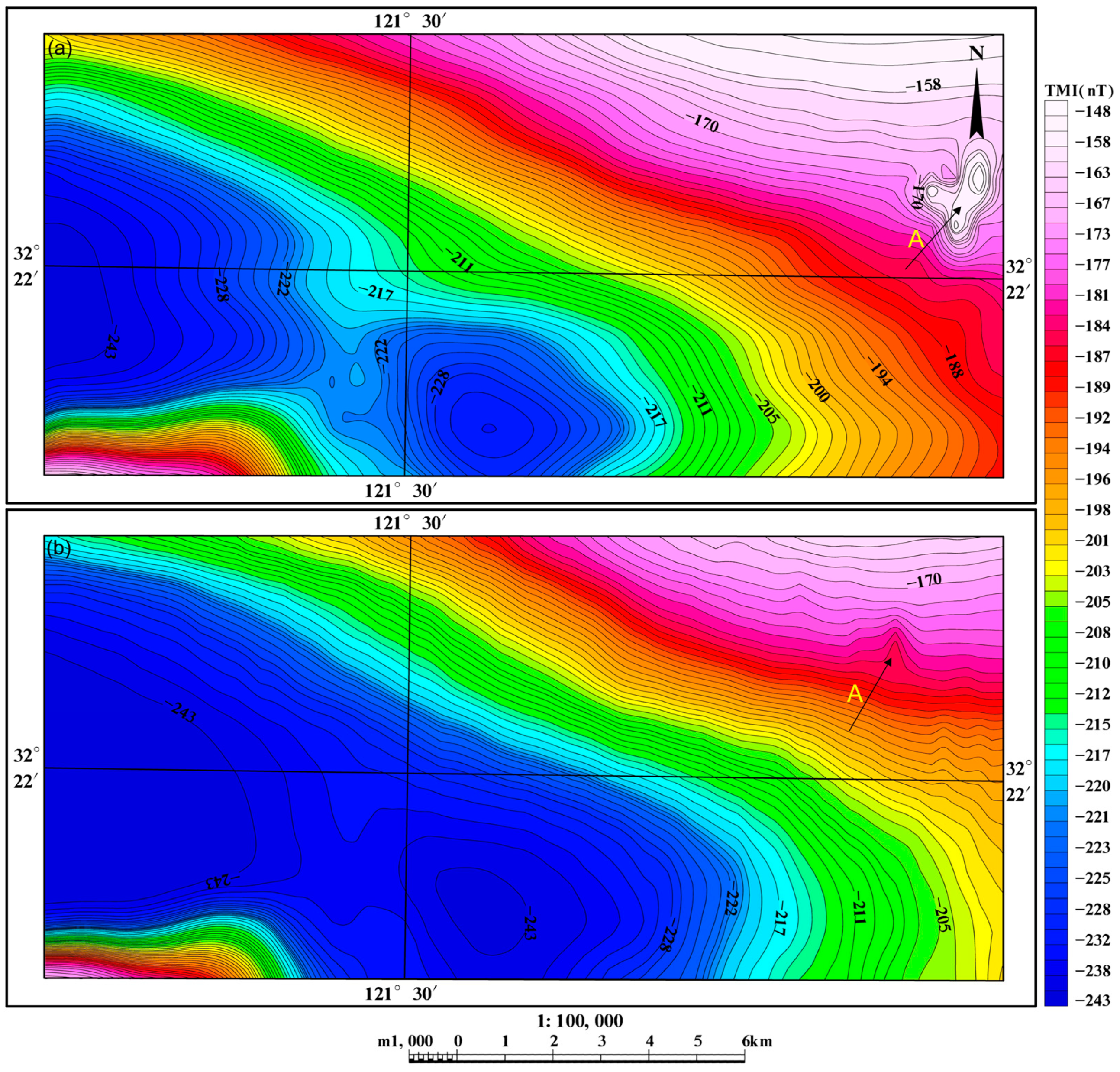
4. Application Test
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Šálek, O.; Matolín, M.; Gryc, L. Mapping of radiation anomalies using UAV mini-airborne gamma-ray spectrometry. J. Environ. Radioact. 2018, 182, 101–107. [Google Scholar] [CrossRef] [PubMed]
- Parshin, A.; Bashkeev, A.; Davidenko, Y.; Persova, M.; Iakovlev, S.; Bukhalov, S.; Grebenkin, N.; Tokareva, M. Lightweight Unmanned Aerial System for Time-Domain Electromagnetic Prospecting—The Next Stage in Applied UAV-Geophysics. Appl. Sci. 2021, 11, 2060. [Google Scholar] [CrossRef]
- Parshin, A.; Morozov, V.; Snegirev, N.; Valkova, E.; Shikalenko, F. Advantages of Gamma-Radiometric and Spectrometric Low-Altitude Geophysical Surveys by Unmanned Aerial Systems with Small Scintillation Detectors. Appl. Sci. 2021, 11, 2247. [Google Scholar] [CrossRef]
- Niethammer, U.; James, M.; Rothmund, S.; Travelletti, J.; Joswig, M. UAV-based remote sensing of the Super-Sauze landslide: Evaluation and results. Eng. Geol. 2012, 128, 2–11. [Google Scholar] [CrossRef]
- Salamí, E.; Barrado, C.; Pastor, E. UAV Flight Experiments Applied to the Remote Sensing of Vegetated Areas. Remote Sens. 2014, 6, 11051–11081. [Google Scholar] [CrossRef]
- Yao, H.; Qin, R.; Chen, X. Unmanned Aerial Vehicle for Remote Sensing Applications—A Review. Remote. Sens. 2019, 11, 1443. [Google Scholar] [CrossRef]
- Gavazzi, B.; Le Maire, P.; Munschy, M.; Dechamp, A. Fluxgate vector magnetometers: A multisensor device for ground, UAV, and airborne magnetic surveys. Lead. Edge 2016, 35, 795–797. [Google Scholar] [CrossRef]
- Qi, Z.P.; Li, X.; Li, H.; Liu, W.T. First Results From Drone-Based Transient Electromagnetic Survey to Map and Detect Unexploded Ordnance. IEEE Geosci. Remote Sens. Lett. 2020, 17, 2055–2059. [Google Scholar] [CrossRef]
- Bajić, M., Jr.; Bajić, M. Modeling and simulation of very high spatial resolution UXOs and landmines in a hyperspectral scene for UAV survey. Remote Sens. 2021, 13, 837. [Google Scholar] [CrossRef]
- Villa, T.F.; Gonzalez, F.; Miljievic, B.; Ristovski, Z.D.; Morawska, L. An overview of small unmanned aerial vehicles for air quality measurements: Present applications and future prospectives. Sensors 2016, 16, 1072. [Google Scholar] [CrossRef]
- Kislik, C.; Dronova, I.; Kelly, M. UAVs in support of algal bloom research: A review of current applications and future opportunities. Drones 2018, 2, 35. [Google Scholar] [CrossRef]
- Cheng, L.; Tan, X.; Yao, D.; Xu, W.; Wu, H.; Chen, Y. A fishery water quality monitoring and prediction evaluation system for floating UAV based on time series. Sensors 2021, 21, 4451. [Google Scholar] [CrossRef] [PubMed]
- Patrick, G.; Killen, P.D. Exploration trends and developments in 2005. Can. Min. J. 2006, 10. [Google Scholar]
- Lum, C.W.; Rysdyk, R.T.; Pongpunwattana, A. Autonomous Airborne Geomagnetic Surveying and Target Identification. Am. Inst. Aeronaut. Astronaut. 2005, 1–12. [Google Scholar] [CrossRef]
- Partner, R. Georanger Aeromagnetic UAV—From Development to Commercial Survey. Preview Aust. Soc. Explor. Geophys. 2006, 125, 28–29. [Google Scholar]
- Barnard, J. Use of Unmanned Air Vehicles in Oil, Gas and Mineral Exploration Activities. In Proceedings of the AUVSI Unmanned Systems North America 2010 Conference, Denver, CO, USA, 26 August 2010. [Google Scholar]
- Patrick, G.; Killeen, P.D. Exploration trends and developments in 2004. Can. Min. J. 2005, 9. [Google Scholar]
- Lalibertee, J. Carleton University Fixed Wing Uav Project. Ph.D. Thesis, Carleton University, Ottawa, NA, Canada, 2013. [Google Scholar]
- Stoll, J.B. Unmanned Aircraft System for Rapid Near Surface Geophysical Measurements. International Archives of the Photogrammetry. Remote Sens. Spat. Inf. Sci. 2013, XL-1/W 2, 391–394. [Google Scholar]
- Hitoshi, M.; Satoshi, T.; Yumiko, O.; Shigeo, M.; Masayuki, S.; Eri, O.; Takuya, S.; Isamu, Y.; Shigekazu, K.; Tatsuya, N.; et al. A Development of Airborne survey of Gravity and Magnetics on an unmanned helicopter and its data processing. In Proceedings of the Japan Geoscience Union meeting, Toyko, Japan, 22 May 2013. [Google Scholar]
- Shin’ya, A.; Minoru, F.; Shin-ichiro, H.; Norihiro, N.; Naoyoshi, I.; Noriaki, O.; Mikio, K. Aeromagnetic survey by a small unmanned airplane over northern part of Deception Island. In Proceedings of the Japan Geoscience Union meeting, Toyko, Japan, 22 May 2013. [Google Scholar]
- Martelet, G.; Gloaguen, E.; Døssing, A.; Lima Simoes da Silva, E.; Linde, J.; Rasmussen, T.M. Airborne/UAV Multisensor Surveys Enhance the Geological Mapping and 3D Model of a Pseudo-Skarn Deposit in Ploumanac’h, French Brittany. Minerals 2021, 11, 1259. [Google Scholar] [CrossRef]
- Phelps, G.; Bracken, R.; Spritzer, J.; White, D. Achieving sub-nanoTesla precision in multirotor UAV aeromagnetic surveys. J. Appl. Geophys. 2022, 206, 104779. [Google Scholar] [CrossRef]
- Zhang, H.R.; Fan, Z.G. Recent Advances in Aerogeophysical Techniques Used Abroad. Geophys. Geochem. Explor. 2007, 31, 451–457. [Google Scholar]
- Xiong, S.Q. The Advances of Aerogeophysical Survey in China Since the Tenth Five Year Plan and Its Development Trend. Geophys. Geochem. Explor. 2007, 31, 479–484. [Google Scholar]
- Li, W.J.; Li, F.; Liu, S.K.; Zhou, N.E. The Progress in the Development of the Integrated UAV Magnetic & Radiation Survey System. Acta Geosci. Sin. 2014, 35, 399–403. [Google Scholar]
- Chinese Academy of Geological Sciences. Top Ten Scientific and Technological Progress of Chinese Academy of Geological Sciences in the Year 2013 Unveiled. Acta Geosci. Sin. 2014, 35, 1–5. [Google Scholar]
- Li, F.; Ding, Z.Q.; Cui, Z.Q.; Xu, Z.L.; Li, J.F. Application Demonstration of the CH-3 UAV-borne Magnetic Survey System in Different Terrain Areas of Xinjiang. Geol. Explor. 2018, 54, 735–746. [Google Scholar]
- Cui, Z.Q.; Xu, Z.L.; Li, J.F.; Li, F. The R&D Application of UAV Airborne Geophysical Survey and Its Development Trend. Comput. Tech. Geophys. Geochem. Explor. 2016, 38, 740–745. [Google Scholar]
- Du, J.Q. Research on Data Acquisition System of Aeromagnetic Three-component Based on Rotor UAV. Ph.D. Thesis, Jilin University, Jilin, China, 2021. [Google Scholar]
- Zheng, Y.; Li, S.; Xing, K.; Zhang, X. Unmanned Aerial Vehicles for Magnetic Surveys: A Review on Platform Selection and Interference Suppression. Drones 2021, 5, 93. [Google Scholar] [CrossRef]
- Zhou, P.Z.; Tang, M.Q.; Liu, D.R.; Wei, W.; Peng, C. Application Research of New Domestic UAV Aeromagnetic System. Hydrogr. Surv. Charting 2022, 42, 30–35. [Google Scholar]
- Qiao, Z.K.; Yuan, P.; Wang, L.F.; Zhang, Z.H.; Huang, Y.S.; Zhang, J.J.; Li, L.L.; Zhang, Z.Y.; Wu, B.; Lin, Q. Research on aeromagnetic compensation of a multi-rotor UAV based on robust principal component analysis. J. Appl. Geophys. 2022, 206, 104791. [Google Scholar] [CrossRef]
- Wang, M.; Liu, Y.Y.; Wang, D.Y.; Dong, G.W.; Tian, L.; Huang, J.H.; Lin, M.M. Application effect analysis of UAV aeromagnetic survey technology in desert and semidesert regions. Geophys. Geochem. Explor. 2022, 46, 206–213. [Google Scholar]
- Li, J.F.; Li, W.J.; Qin, X.W.; Xu, Z.L.; Liu, J.J.; Meng, Q.M.; Li, F.; Liu, Y.Y. Trial Survey of a Novel UAV-borne Magnetic System in the Duobao-shan Ore District. Geophys. Geochem. Explor. 2014, 38, 846–850. [Google Scholar]
- Liu, S.; Hu, X.Y.; Zuo, B.X.; Zhang, H.L.; Geng, M.X.; Ou, Y.; Yang, T.; Saeed. V. Susceptibility and remanent magnetization inversion of magnetic datawith a priori information of the Koenigsberger ratio. Geophys. J. Int. 2020, 221, 1090–1109. [Google Scholar] [CrossRef]
- Liu, S.; Fedi, M.; Hu, X.Y.; Baniamerian, J.; Wei, B.S.; Zhang, D.L.; Zhu, R.X. Extracting induced and remanent magnetizations from magnetic datamodeling. J. Geophys. Res.-Solid Earth 2018, 123, 9290–9309. [Google Scholar] [CrossRef]
- Xi, Y.Z.; Lu, N.; Zhang, L.; Li, J.F.; Zhang, F.M.; Wu, S.; Liao, G.X.; Beng, F.; Huang, W. Integration and application of an aeromagnetic survey system based on unmanned helicopter platform. Geophys. Geochem. Explor. 2019, 43, 125–131. [Google Scholar]
- Xi, Y.Z.; Wu, S.; Liao, G.X.; Liu, J.J.; Lu, N.; Li, Y.B. An application test of UAV aeromagnetic survey in geological survey of the tidal flat area. Geophys. Geochem. Explor. 2021, 45, 355–360. [Google Scholar]
- Wang, L.F.; Xue, D.J.; Duan, S.L.; He, H.; Xiong, S.Q. The Normative Evaluation of Aeromagnetic Compensation Action. Geophys. Geochem. Explor. 2016, 40, 365–369. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | FUAV | MUH |
|---|---|---|
| Data type | TMI/horizontal gradient | TMI |
| Year | 2013 | 2017 |
| Magnetometer | CS-3/CS-VL | CS-VL |
| Compensation and collection system | AARC51/AARC500/ AARC510/DAARC510 | AARC51/AARC510 |
| UAV platform | CH-3 FUAV | WH-110A MUH |
| Wingspan | 8 m | Helicopter |
| Maximum takeoff weight | 640 kg | 110 kg |
| Takeoff and landing way | Wheel autonomy | Vertical |
| Cruising speed | 170–200 km/h | ≤60 km/h |
| Maximum flight time | 10 h | 3 h |
| Control distance | Radio within 250 km/maritime satellite | Radio within 100 km |
| Night flight | Yes | No |
| Positioning system | DGPS | DGPS |
| Maximum payload | 160 kg | 35 kg |
| System | Unco | Comp | Impr | Norm | Bias |
|---|---|---|---|---|---|
| FUAV | 0.54509 | 0.01428 | 38.185 | 38.940 | 14.591 |
| MUH | 0.39766 | 0.04690 | 8.479 | 10.383 | 3.059 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xi, Y.-Z.; Liao, G.-X.; Lu, N.; Li, Y.-B.; Wu, S. Study on the Aeromagnetic System between Fixed-Wing UAV and Unmanned Helicopter. Minerals 2023, 13, 700. https://doi.org/10.3390/min13050700
Xi Y-Z, Liao G-X, Lu N, Li Y-B, Wu S. Study on the Aeromagnetic System between Fixed-Wing UAV and Unmanned Helicopter. Minerals. 2023; 13(5):700. https://doi.org/10.3390/min13050700
Chicago/Turabian StyleXi, Yong-Zai, Gui-Xiang Liao, Ning Lu, Yong-Bo Li, and Shan Wu. 2023. "Study on the Aeromagnetic System between Fixed-Wing UAV and Unmanned Helicopter" Minerals 13, no. 5: 700. https://doi.org/10.3390/min13050700
APA StyleXi, Y.-Z., Liao, G.-X., Lu, N., Li, Y.-B., & Wu, S. (2023). Study on the Aeromagnetic System between Fixed-Wing UAV and Unmanned Helicopter. Minerals, 13(5), 700. https://doi.org/10.3390/min13050700