


Noise Characteristics and Denoising Methods of Long-Offset Transient Electromagnetic Method



Abstract
:1. Introduction
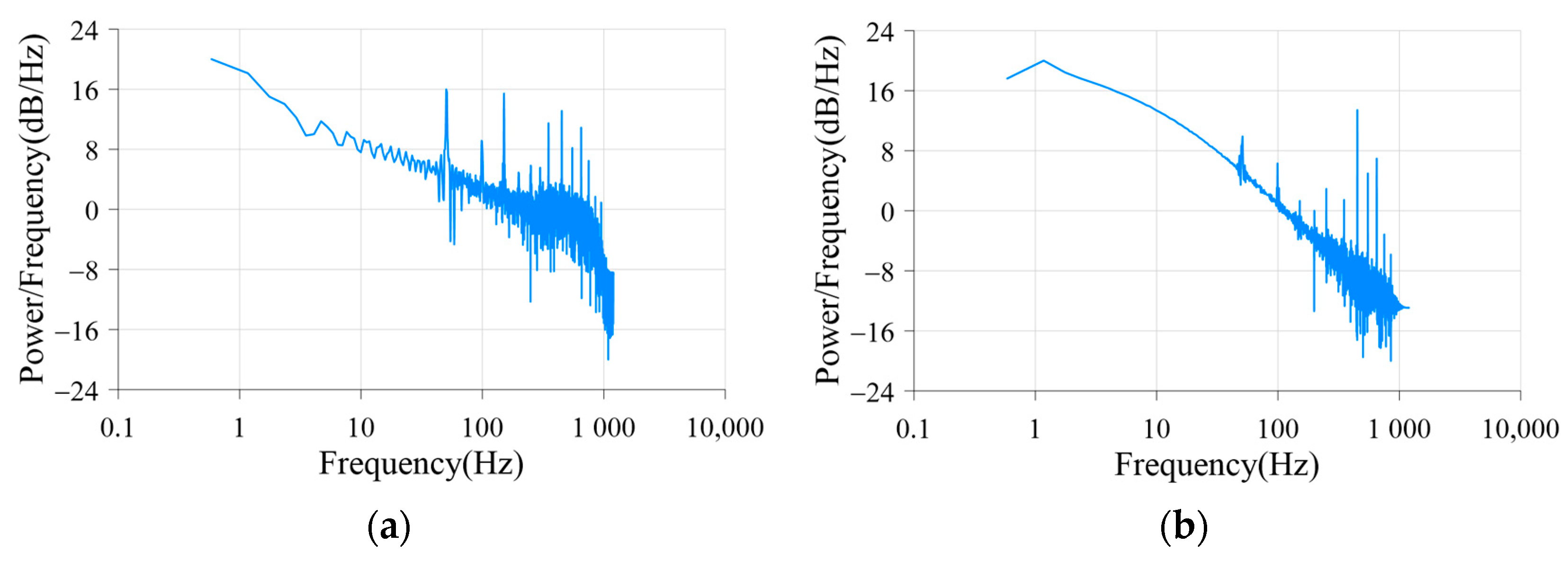
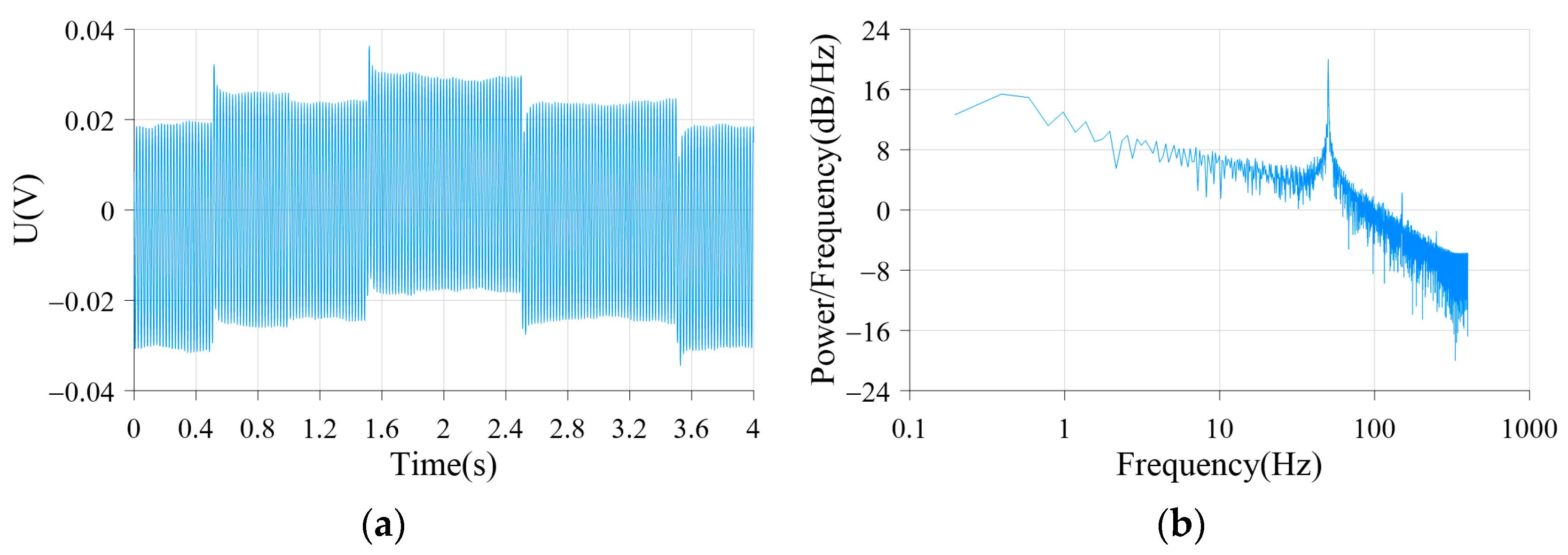
2. Analysis of LOTEM Signal Characteristics and Noise Sources
3. LOTEM Denoising Process and Methods
3.1. Denoising Process
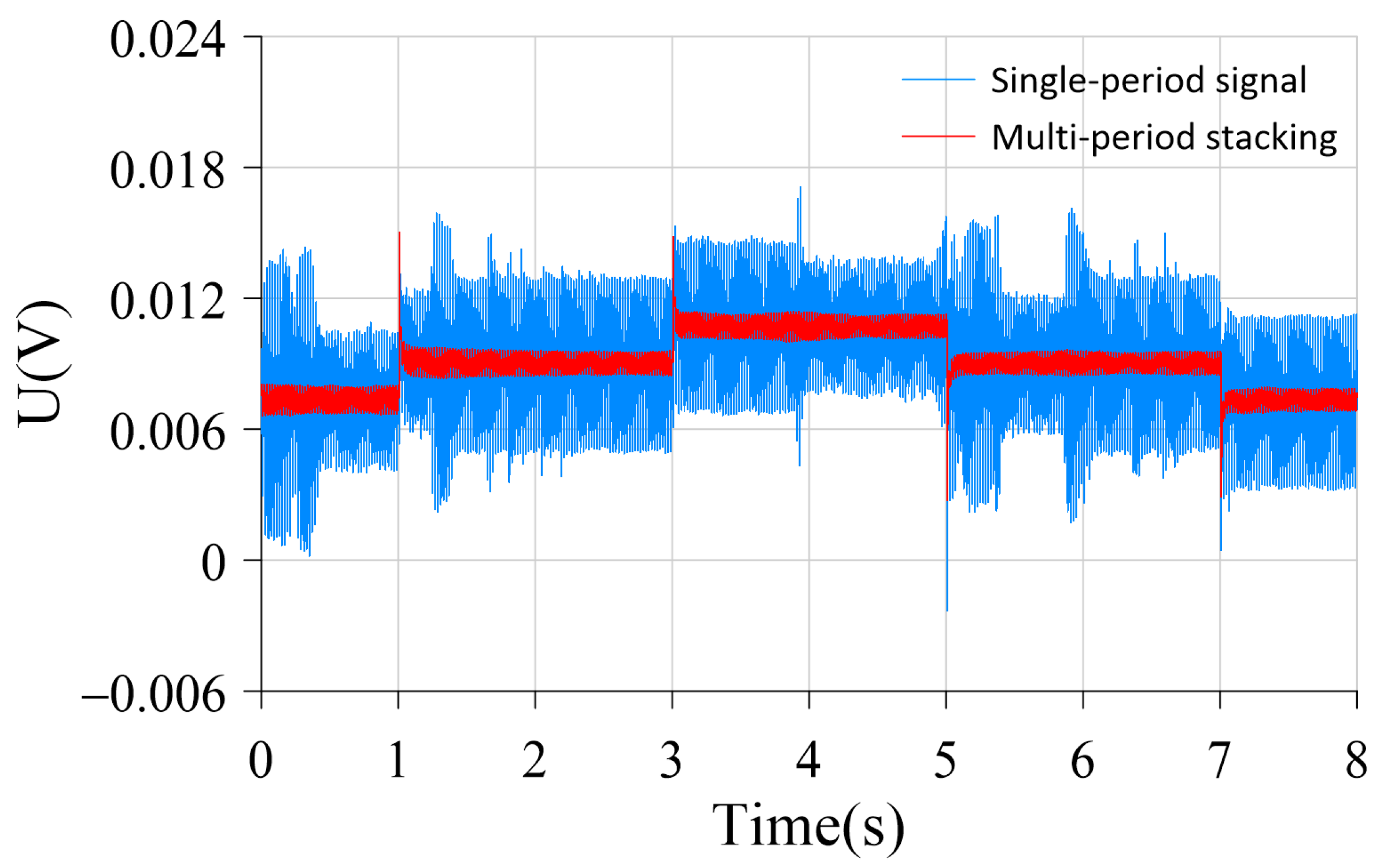
3.2. Signal Stacking
3.3. Time-Domain Inverse Digital Recursive Filter
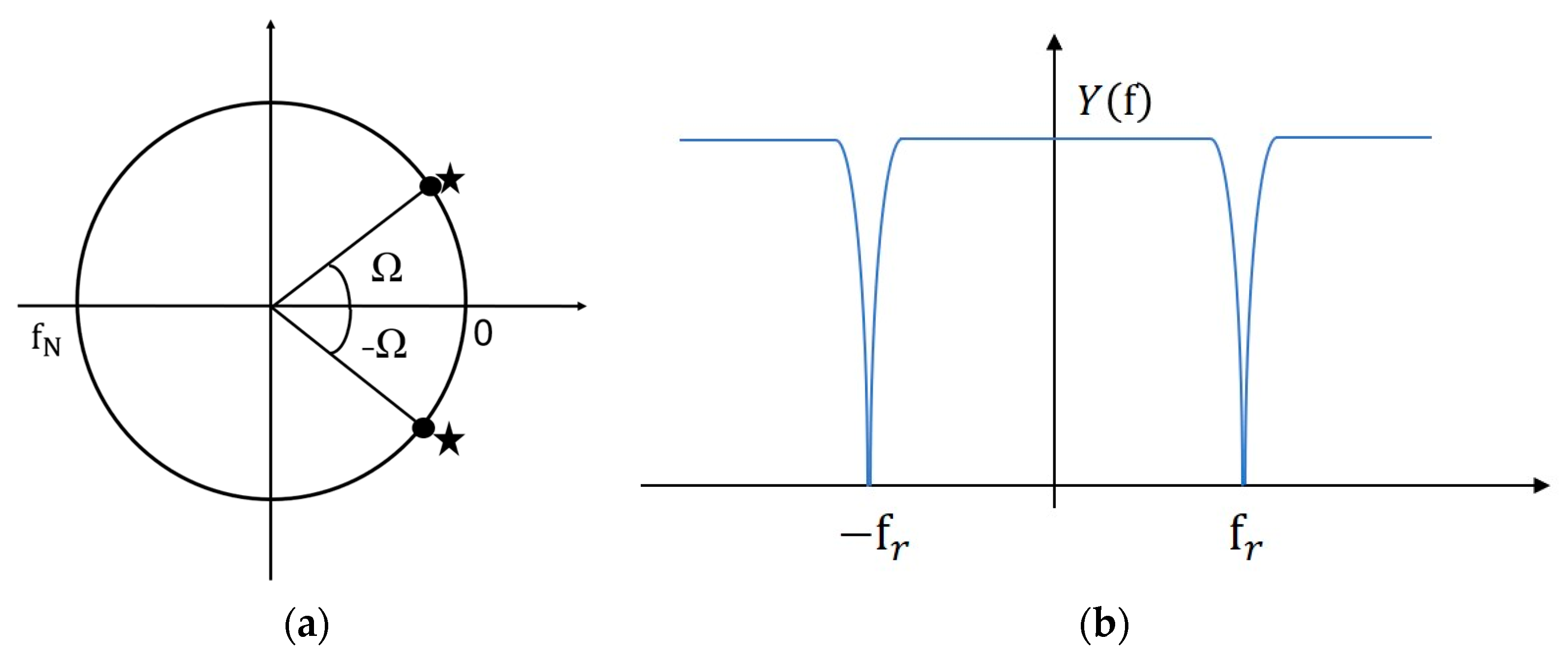
3.3.1. Concept of Recursive Filtering
3.3.2. Time-Domain Inverse Digital Filter Design Method
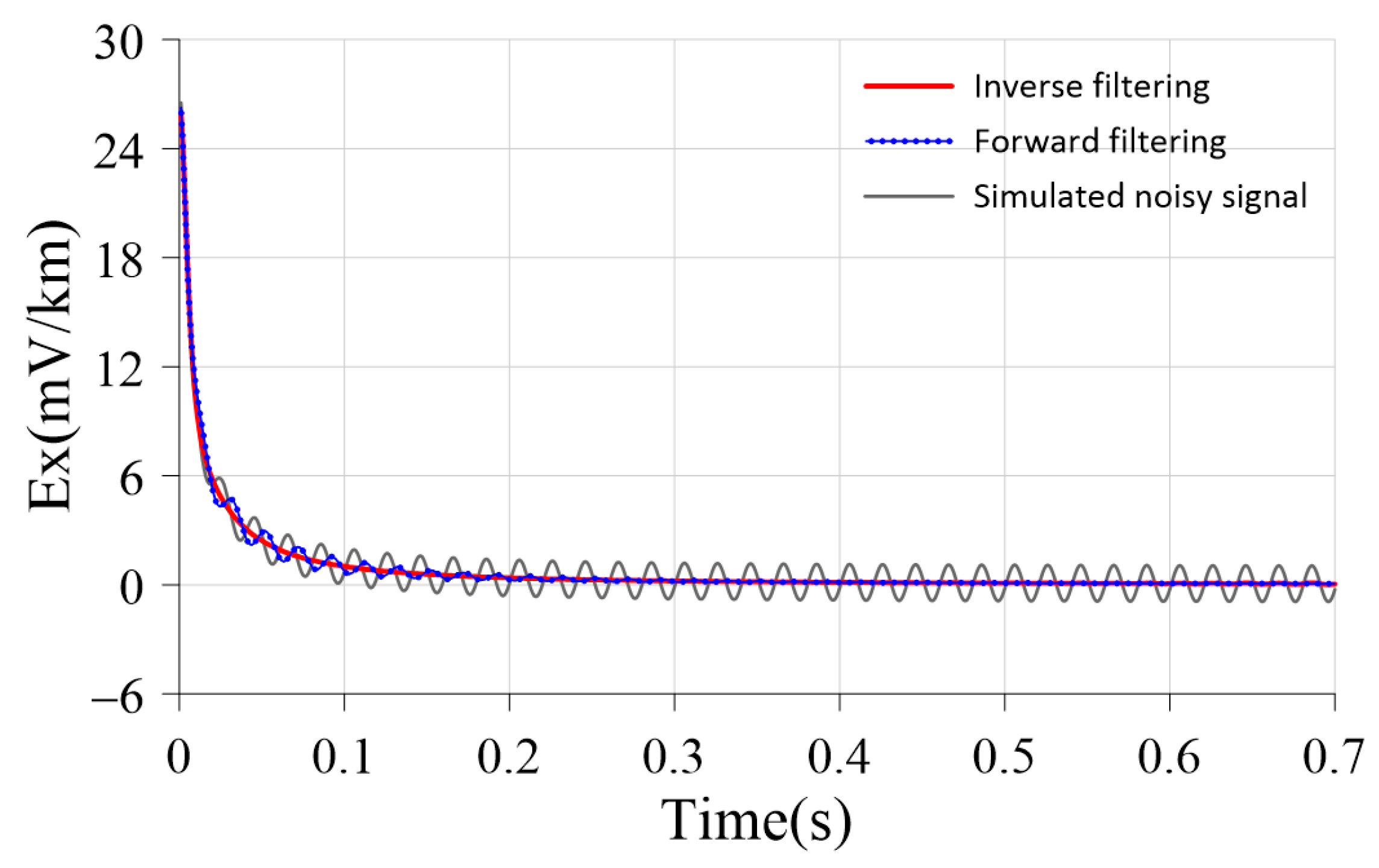
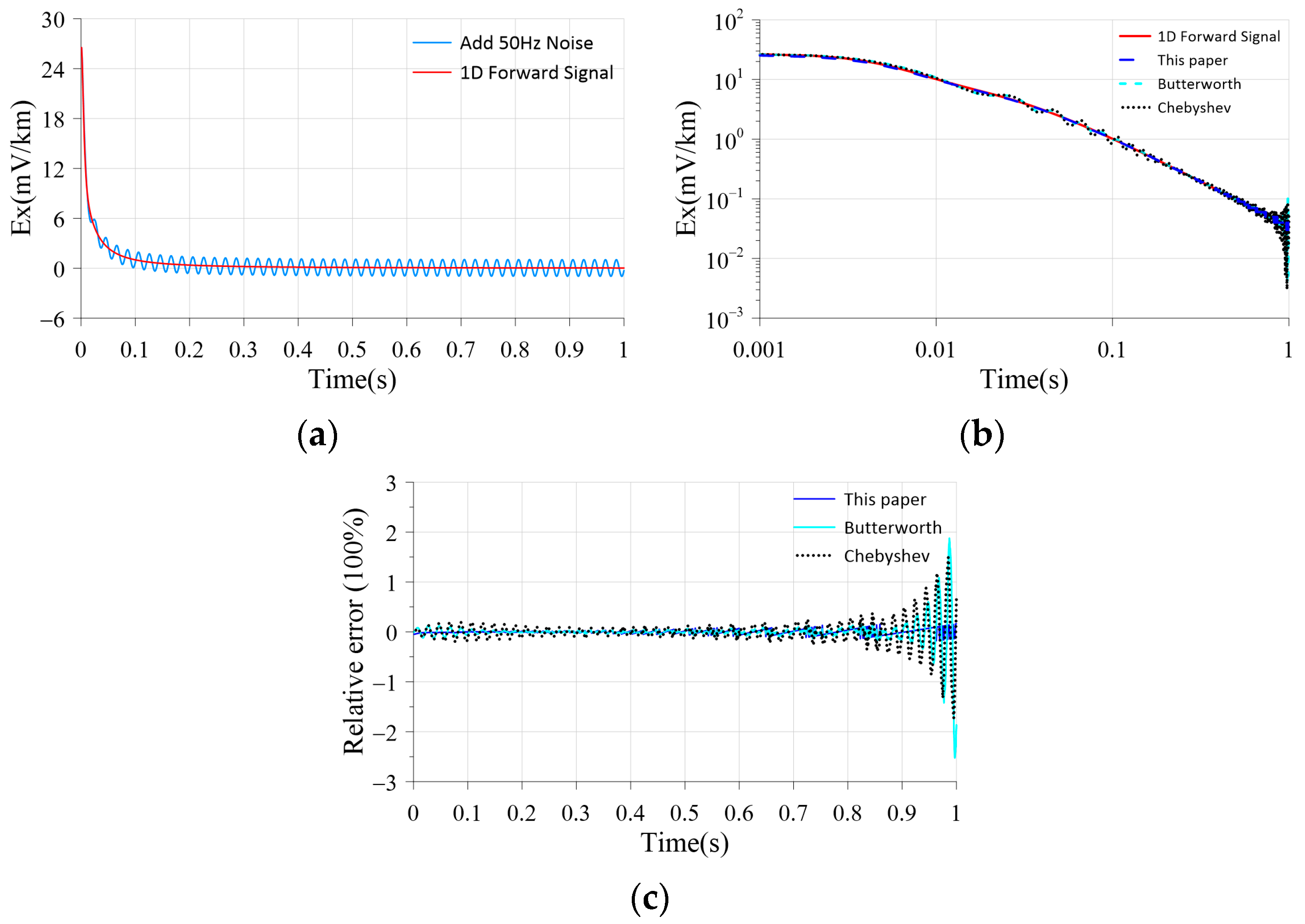
3.4. Algorithm Verification
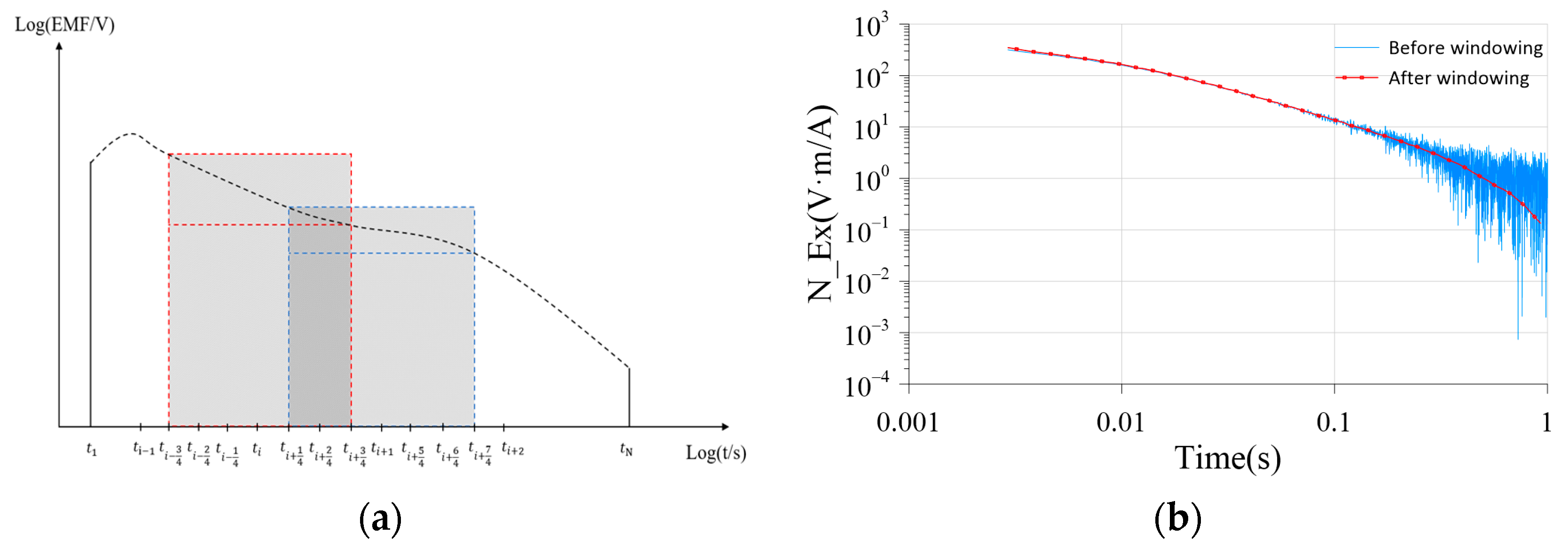
3.5. Window Smoothing
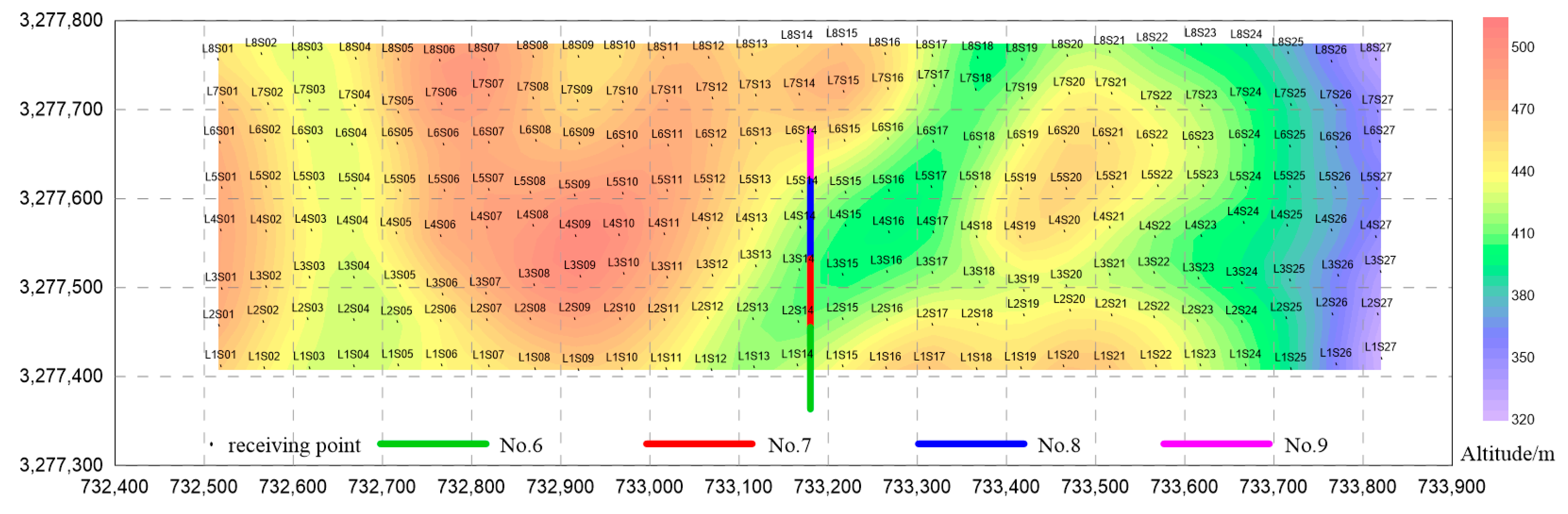
4. Analysis of the Processing Effect of Measured Data
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Strack, K. Exploration with Deep Transient Electromagnetics; Elsevier: Amsterdam, The Netherlands, 1992; ISBN 978-0444895417. [Google Scholar]
- Keller, G.V. Electromagnetic Surveys in the Central Volcanic Region; Geophysics Division Report; Geophysics Division: Wellington, New Zealand, 1969. [Google Scholar]
- Kaufman, A.A.; Keller, G.V. Frequency and Transient Soundings; Elsevier: Amsterdam, The Netherlands, 1983; Volume 55, p. 65. [Google Scholar]
- Newman, G.A. Deep transient electromagnetic soundings with a grounded source over near-surface conductors. Geophys. J. Int. 1989, 98, 587–601. [Google Scholar] [CrossRef]
- Commer, M.; Helwig, S.L.; Hördt, A.; Scholl, C.; Tezkan, B. New results on the resistivity structure of Merapi Volcano (Indonesia), derived from three-dimensional restricted inversion of long-offset transient electromagnetic data. Geophys. J. Int. 2006, 167, 1172–1187. [Google Scholar] [CrossRef]
- Vozoff, K.; Moss, D.; LeBrocq, K.; McAllister, K. LOTEM electric field measurements for mapping resistive horizons in petroleum exploration. Explor. Geophys. 1985, 16, 309–312. [Google Scholar] [CrossRef]
- Piao, H.R. Principles of Electromagnetic Sounding; Geological Publishing House: Beijing, China, 1990. [Google Scholar]
- Xue, G.Q.; Li, X.; Di, Q.Y. The progress of TEM in theory and application. Prog. Geophys. 2007, 22, 1195–1200. [Google Scholar]
- Macnae, J.; Lamontagne, Y.; West, G. Noise processing techniques for time-domain EM systems. Geophysics 1984, 49, 934–948. [Google Scholar] [CrossRef]
- Andrew, K.H. Application of frequency-domain polyphase filtering to quadrature sampling. Proc. Spie 1995, 2563, 450–457. [Google Scholar]
- An, H.B.; Shen, Y.Y. A method to suppress narrow-band interference based on frequency domain filter. Optoelectron. Technol. Inf. 2004, 18, 64–68. [Google Scholar]
- Cui, Z.; Cheng, M.; Wu, Q.; Wang, B. A technique of fast median filtering and its application to data quality control of doppler radar. Plateau Meteorol. 2005, 24, 727–733. [Google Scholar]
- Mörbe, W.; Yogeshwar, P.; Tezkan, B.; Hanstein, T. Deep exploration using long-offset transient electromagnetics: Interpretation of field data in time and frequency domain. Geophys. Prospect. 2020, 68, 1980–1998. [Google Scholar] [CrossRef]
- Bai, F.F.; Miao, C.Y.; Zhang, C.; Gan, J.M. Studying on denoising algorithm of heart sound signal based on the generalized mathematical morphology. In Proceedings of the IEEE 10th International Conference on Signal Processing Proceedings, Beijing, China, 24–28 October 2010; pp. 1797–1800. [Google Scholar]
- Zhou, Y.X. Research and Application of Adaptive Filtering in Transient Electromagnetic Denoising. Master’s Thesis, Chengdu University of Technology, Chengdu, China, 2018. [Google Scholar]
- Strack, K.; Hanstein, T.; Eilenz, H. LOTEM data processing for areas with high cultural noise levels. Phys. Earth Planet. Inter. 1989, 53, 261–269. [Google Scholar] [CrossRef]
- Li, S.Y.; Lin, J.; Yang, G.H.; Tian, P.P.; Wang, Y.; Yu, S.B.; Ji, Y.J. Ground-Airborne electromagnetic signals de-nosing using a combined wavelet transform algorithm. Chin. J. Geophys. 2013, 56, 3145–3152. (In Chinese) [Google Scholar]
- Liu, J.; Lei, W.; Zhang, Y.; Yang, W. The Application Research of TEM De-noising Based on Improved Wavelet Threshold Function. Chin. J. Eng. Geophys. 2014, 11, 547–552. [Google Scholar]
- Zhao, J.P.; Huang, D.J. Mirror extending and circular spline function for empirical mode decomposition method. J. Zhejiang Univ.-Sci. A 2001, 2, 247–252. [Google Scholar] [CrossRef]
- Julian, L.G.; Danilo, R. A simple method inspired by empirical mode decomposition for denosing seismic data. Geophysics 2016, 81, 403–413. [Google Scholar]
- Han, J.J.; Banan, M.V.D. Empirical mode decomposition for seismic time-frequency analysis. Geophysics 2013, 78, 9–19. [Google Scholar] [CrossRef]
- Li, C.W.; Dong, L.H.; Wang, Q.F.; Wang, F.Y.; Hu, B.; Xu, X.M. Noise auto identification and de-noising method of coal-rock weak electromagnetic signals. J. China Coal Soc. 2016, 41, 1933–1940. [Google Scholar]
- Wu, S.H.; Huang, Q.H.; Zhao, L. De-noising of transient electromagnetic data based on the long short-term memory-autoencoder. Geophys. J. Int. 2020, 224, 669–681. [Google Scholar] [CrossRef]
- Caldwell, T.G.; Bibby, H.M. The instantaneous apparent resistivity tensor: A visualization scheme for LOTEM electric field measurements. Geophys. J. Int. 1998, 135, 817–834. [Google Scholar] [CrossRef]
- Ziolkowski, A.; Hobbs, B.A.; Wright, D. Multitransient electromagnetic demonstration survey in France. Geophysics 2007, 72, F197–F209. [Google Scholar] [CrossRef]
- Haroon, A.; Adrian, J.; Bergers, R.; Gurk, M.; Tezkan, B.; Mam Madov, A.; Novruzov, A. Joint inversion of long-offset and central-loop transient electromagnetic data: Application to a mud volcano exploration in Perekishkul, Azerbaijan. Geophys. Prospect. 2015, 63, 478–494. [Google Scholar] [CrossRef]
- Strack, K.M. Future Directions of Electromagnetic Methods for Hydrocarbon Applications. Surv. Geophys. 2014, 35, 157–177. [Google Scholar] [CrossRef]
- Airo, M.L. Geophysical signatures of mineral deposit types in finland. Geol. Surv. Finl. 2015, 58, 9–70. [Google Scholar]
- Spagnoli, G.; Hannington, M.; Bairlein, K.; Hördt, A.; Jegen, M.; Petersen, S.; Laurila, T. Electrical properties of seafloor massive sulfides. Geo-Mar. Lett. 2016, 36, 235–245. [Google Scholar] [CrossRef]
- Streich, R. Controlled-Source Electromagnetic Approaches for Hydrocarbon Exploration and Monitoring on Land. Surv. Geophys. 2016, 37, 47–80. [Google Scholar] [CrossRef]
- Xie, X.B.; Zhou, L.; Yan, L.J.; Hu, W.B. Remaining oil detection with time-lapse long offset & window transient electromagnetic sounding. Oil Geophys. Prospect. 2016, 51, 605–612. [Google Scholar]
- Yogeshwar, P. Resistivity-Depth Model of the Central Azraq Basin Area, Jordan: 2D Forward and Inverse Modeling of Time Domain Electromagnetic Data. Ph.D. Thesis, Universität zu Köln, Cologne, Germany, 2014. [Google Scholar]
- Yan, L.J. Electromagnetic Exploration Methods and Their Applications in Southern Carbonate Rock Regions; Petroleum Industry Press: Beijing, China, 2001. [Google Scholar]
- Spies, B.R. A filed occurrence of sign reversals with the transient electromagnetic method. Geophys. Prospect. 1980, 28, 620–633. [Google Scholar] [CrossRef]
- Lee, T. Transient electromagnetic response of a polarizable ground. Geophysics 1981, 46, 1037–1041. [Google Scholar] [CrossRef]
- Shanks, J. Recursion filters for digital processing. Geophysics 1967, 32, 33–51. [Google Scholar] [CrossRef]
- Kulhanek, O. Introduction to Digital Filtering in Geophysics; Elsevier: Amsterdam, The Netherlands, 1976. [Google Scholar]
- Claerbout, J.F. Fundamentals of Geophysical Data Processing with Applications to Petroleum Prospecting; Blackwell Science Inc.: Oxford, UK, 1985; ISBN 978-0865423053. [Google Scholar]
- Li, B.F. Data processing of Geophysical prospecting. J. Ocean. Univ. Qingdao 1994, S3, 144–147. [Google Scholar]
- Zhang, C.G. Application of Wavelet Analysis in Signal Denoising. Master’s Thesis, University of Electronic Science and Technology, Chengdu, China, 2018. [Google Scholar]
- Zhong, J.J.; Song, J.; You, C.X.; Yin, X.Q. Wavelet de-noising method with threshold selection rules based on SNR evaluations. J. Tsinghua Univ. Sci. Technol. 2014, 54, 259–263. (In Chinese) [Google Scholar]
- Di, Q.Y. New Technologies and Applications of Electromagnetic Detection in Major Geological Engineering Projects; Science Press: Beijing, China, 2020; ISBN 9787030671011. [Google Scholar]
- Di, Q.Y.; Fang, G.Y.; Zhang, Y.M. Research of the Surface Electromagnetic Prospecting (SEP) system. Chin. J. Geophys. 2013, 56, 3629–3639. (In Chinese) [Google Scholar]
- Di, Q.Y.; Xue, G.Q.; Wang, Z.X.; He, L.F.; Pei, R.Z.; Zhang, T.X.; Fang, G.Y. Lithospheric structures across the Qiman Tagh and western Qaidam Basin revealed by magnetotelluric data collected using a self-developed SEP system. Sci. China Earth Sci. 2021, 64, 1813–1820. [Google Scholar] [CrossRef]
- Di, Q.Y.; Fu, C.M.; An, Z.G.; Xu, C.; Wang, Y.L.; Wang, Z.X. Field testing of the surface electromagnetic prospecting system. Appl. Geophys. 2017, 14, 449–458. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Signal | RMSE | SNR |
|---|---|---|
| simulated noisy signal | 7.0715 × 10−7 | 10.1770 |
| This paper | 7.8753 × 10−8 | 28.6625 |
| Butterworth | 1.1810 × 10−7 | 25.3241 |
| Chebyshev | 1.1703 × 10−7 | 25.3530 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Y.; Xie, X.; Zhou, L.; Xi, B.; Yan, L. Noise Characteristics and Denoising Methods of Long-Offset Transient Electromagnetic Method. Minerals 2023, 13, 1084. https://doi.org/10.3390/min13081084
Xu Y, Xie X, Zhou L, Xi B, Yan L. Noise Characteristics and Denoising Methods of Long-Offset Transient Electromagnetic Method. Minerals. 2023; 13(8):1084. https://doi.org/10.3390/min13081084
Chicago/Turabian StyleXu, Yang, Xingbing Xie, Lei Zhou, Biao Xi, and Liangjun Yan. 2023. "Noise Characteristics and Denoising Methods of Long-Offset Transient Electromagnetic Method" Minerals 13, no. 8: 1084. https://doi.org/10.3390/min13081084
APA StyleXu, Y., Xie, X., Zhou, L., Xi, B., & Yan, L. (2023). Noise Characteristics and Denoising Methods of Long-Offset Transient Electromagnetic Method. Minerals, 13(8), 1084. https://doi.org/10.3390/min13081084