1. Introduction
The nature of modern high-volume production is characterized by a large number of items passing through many production steps. This type of production system has fluid-like properties and has been modeled successfully by continuum models [
1,
2,
3,
4,
5]. In these models, the product at different production stages and the speed of production are the quantities of interest.
Specifically, in the manufacturing system of a factory that involves a highly re-entrant system where products visit machines multiple times, such as the production of semiconductor devices, a continuum model has been introduced in [
3] that is inspired by the Lighthill–Whitham traffic model [
6]. The dynamics of this model is mathematically given by hyperbolic partial differential equation of the form
where
is the product density which describes the total mass
at the time
t and the production stage
x,
Contrary to classical traffic flow models, the differential equation depends on the
nonlocal quantity (
2). The function
is a velocity. In production systems, it is natural to assume that the velocity function is positive and decreasing as the total mass is increasing. In the manufacturing system, the initial density of products at production stage
x is taken as the initial data
and the influx is used to control the system or stabilize the system at an equilibrium. Since the velocity is positive, we only require boundary conditions at
, i.e., the influx
Under suitable assumptions on
and
U, the existence and uniqueness of a classical solution of the Cauchy problem for the scalar conservation law Equation (
1) with Equations (
3) and (
4) is proven in [
7,
8,
9,
10].
General stabilization problems with boundary controls have been studied in the past years in [
11,
12,
13,
14,
15,
16,
17,
18,
19,
20,
21,
22] for hyperbolic systems and recently in [
7,
10] for scalar conservation laws with nonlocal velocity. The focus is to derive an asymptotic stability around a given equilibrium such that solutions to the conservation laws reach the equilibrium state as time tends to infinity. Such a property is attained by an exponential stability result and presented for example in ([
21], Theorem 2.3) for quasi-linear hyperbolic systems. Further references also on hyperbolic balance laws other hyperbolic systems may be found in the recent book [
15].
However, when boundary controls are subjected to unknown disturbances, solutions reaching the given equilibrium point are influenced by the disturbances and a notion of asymptotic stability is required. The concept of input-to-state stability (ISS) [
11,
20,
23] has been used to describe asymptotic stability. Concerning an asymptotic behavior of classical solutions, the Lyapunov method is used to investigate sufficient conditions to achieve an exponential stability in [
16,
17] for hyperbolic systems and in [
7,
10] for scalar conservation laws with nonlocal velocity. The Lyapunov method is also used for ISS of (local) hyperbolic systems in [
11,
20]. For the numerical analysis of asymptotic behavior of numerical solutions discretized by a first-order finite volume scheme, a discrete Lyapunov function is used to prove exponential stability results for hyperbolic systems in [
24,
25,
26,
27,
28] and for scalar conservation laws with nonlocal velocity in [
10], and ISS results for (local) hyperbolic systems could be established recently in [
29,
30]. Please note that the previous given references refer to ISS for hyperbolic systems. However, the theory of ISS has also been developed for other systems as for example, linear systems, time-delay equations or parabolic differential equations. A detailed review of those results is beyond the scope of this presentation and we refer the interested reader to the recent review article [
31] for additional references and a review of the state-of-the-art in this field.
The previously given references refer all to ISS theory for hyperbolic problems. However, it is worth mentioning that there exists a huge amount of literature on ISS stability for problems related to other differential equations. We can not review those at this point but would like to point to some references on ISS theory for infinite-dimensional problems [
32,
33] and for linear [
34], semi-linear [
35] and nonlinear [
36] parabolic system with boundary inputs. A systematic treatment of ISS using (linear) operator theory has been presented for example in [
37] and non-coercive Lyapunov theory for ISS in [
38,
39].
Our focus in this work is hyperbolic problems. In connection with (hyperbolic) scalar conservation law with nonlocal velocity, in [
10], the authors have studied global feedback stabilization of the closed-loop system in Equation (
1) under the feedback law
where
is the feedback parameter and
is a given equilibrium. They generalize the stabilization results of [
7] by using a Lyapunov function. In particular, for a given equilibrium
and a general velocity function
, the global stabilization result in
for the closed-loop system of Equations (
1), (
3) and (
5) is generalized to
. Then, the global stabilization result in
for the closed-loop system of Equations (
1), (
3) and (
5) with a family of velocity functions
is obtained for a given equilibrium
. By using a discrete Lyapunov function, they also established stabilization results for a discrete scalar conservation law with nonlocal velocity and using a first-order finite volume scheme.
In this paper, we study ISS for the closed-loop system of Equations (
1) and (
3) under the feedback law defined by
where
is a bounded perturbation in the measurement. In particular, we use an ISS-Lyapunov function to investigate sufficient and necessary conditions for ISS in
for an equilibrium
and the velocity function defined by Equation (
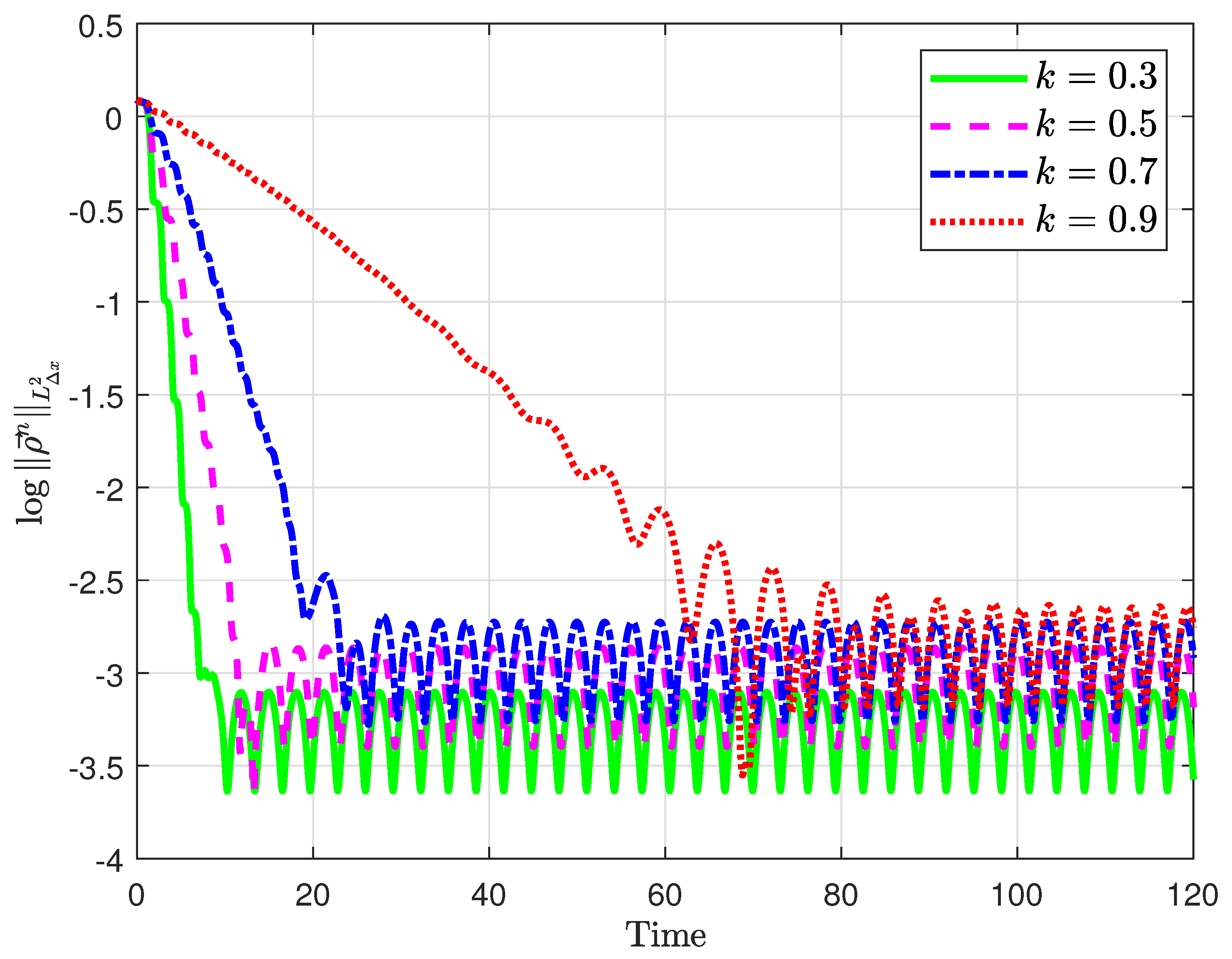
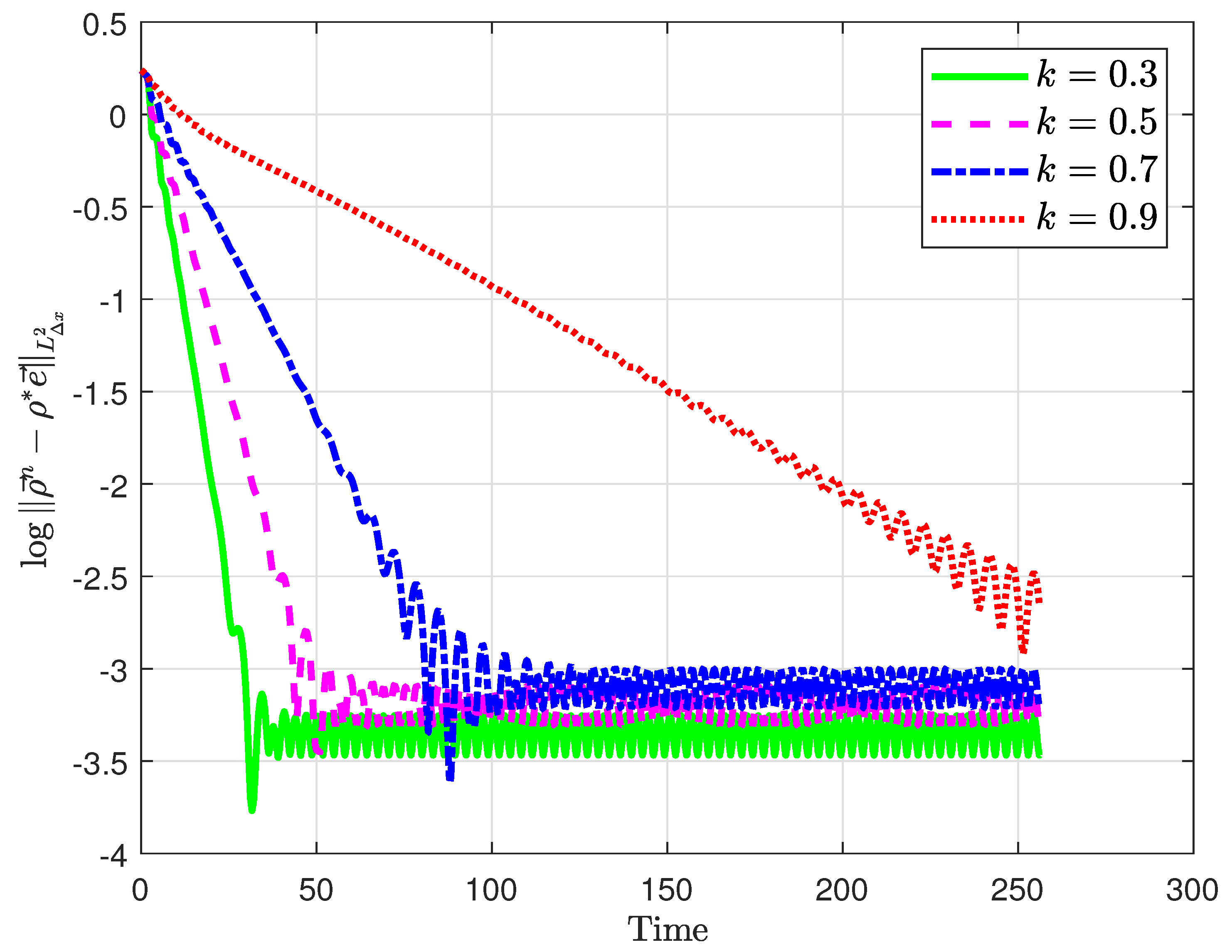
6). The numerical analysis of sufficient and necessary conditions for ISS is performed by using a discrete ISS-Lyapunov function for numerical solution obtained by a first-order finite volume scheme. Moreover, we provide numerical simulations to illustrate theoretical results for some velocity functions of type Equation (
6).
The paper is organized as follows: In
Section 2, we present stabilization results of ISS for a scalar conservation law with nonlocal velocity and measurement error. The numerical discretization of stabilization results of ISS for the scalar conservation law with nonlocal velocity and measurement error is presented in
Section 3. Finally, in
Section 4, we show numerical simulations for the scalar conservation law with nonlocal velocity and measurement error to illustrate the theoretical results.
2. Asymptotic Stability of a Scalar Conservation Law with Nonlocal Velocity and Measurement Error
We study ISS of a closed-loop system of scalar conservation laws with nonlocal velocity and measurement error of the form:
where
is the product density,
is the velocity function,
is total mass,
is the controller and
is a non-negative feedback parameter,
is an equilibrium solution and
is a bounded (known) perturbation in the measurement. A weak solution of the closed-loop system in Equation (
8) is defined below.
Definition 1. (Weak solution).
Fix A function is called a weak solution to Equation (8) if for every and every satisfyingthe following equation holds: Let
,
,
and
be given. Then, the existence and uniqueness of the non-negative weak solution
and the non-negative classical solution
of the closed-loop system in Equation (
8) are available in [
7,
10].
We now analyze ISS for the system Equation (
8) with
in the sense of the following definitions. This is also known as global ISS. Note that ISS Lyapunov functions can be defined within a very general setting and we refer to ([
31], Definition 2.11) for such a definition. In Definition (3) below, we introduce ISS-Lyapunov functions tailored to system Equation (
8).
Definition 2. (Input-to-state stability (ISS)
Let An equilibrium of the closed-loop system in Equation (8) is exponential ISS in -norm with respect to any disturbance function such that if there exist positive constants independent of d such that, for every initial condition , the -solution to the closed-loop system in Equation (8) satisfies Hence, the equilibrium is ISS with respect to disturbances
Definition 3. (ISS-Lyapunov function).
The function is said to be an ISS-Lyapunov function for the closed-loop system in Equation (8) if- (i)
there exist positive constants and such that for all solutions and - (ii)
there exist positive constants and such that for all solutions and
For a notion of differentiability of
, we also refer for example to ([
31], Section 2.2). To simplify the notation we also introduce the function
where
is the solution to Equation (
8).
Theorem 1. (ISS for
).
Fix any , , and any satisfying a.e. in . Assume furtherAssume there exists a non-negative almost everywhere weak solution to the Cauchy problem in Equation (8) where λ is given by Equation (6). Then, the steady-state of the system in Equation (8) is exponential ISS in -norm with respect to any disturbance function . Before we begin the proof of Theorem 1, we consider the following transformation at the equilibrium
,
Then, the system in Equation (
8) with Equation (
6) can be rewritten as follows for
:
By using the velocity function Equation (
6) in Equation (
13), we have
where
For convenience, until the end of this proof, we omit the symbol “~”. Then, the system in Equation (
13) with Equation (
14) can be rewritten in the following form for
:
With the above notation, the assumption in Equation (
12) of Theorem 1 reads
Proof. The following proof of Theorem 1 is an extension of the proof of Theorem 3.2 in [
10]. Since
-functions are dense in
, we can analyze ISS for the system Equation (
15) with non-negative weak solution
as follows: For
, we first define a candidate ISS-Lyapunov function by
and then we have according to (
11)
where
and
are constants. By definition of
W and Hölder inequality, we have
Hence, if
then
for all
. We will further assume from now on that
Furthermore, for
we obtain
and for
we have
Since
we also obtain
Summarizing, there exist positive constants
,
such that for all
and therefore
is equivalent to the
-norm of
Note that for
we may set
in Equation (
17). The time derivative of the candidate ISS-Lyapunov function in Equation (
17) is given by:
where
contains all contributions due to the boundary conditions. In the following we will analyze and estimate
. Note that
and
U is given by Equation (
15). More precisely, we will use the following estimate for any
In order to simplify the notation of the following computations, we neglect the time dependence and we define
Even so, it is not necessary that the proof simplifies if
is chosen depending on
We set for
For any fixed
and all
with
, we have
and hence for all
with
, we have
For
, we have
and we have
. Hence, there exists a
such that for all
and for
as given by Equation (
27), the inequalities (
26), (
27) and (
19) hold true. Using the inequality (
26) and the particular choice for
and
, we obtain for all
sufficiently small
Using the estimate (
20) to bound
and using
, we obtain
An elementary computation shows that
has the following properties
Replacing
by a second-order Taylor expansion in
at
therefore yields the estimate
Now, we proceed with the estimate of
as
Since
there exists
sufficiently small, such that
Using the estimate (
22) there is a constant
, we obtain
By definition, we have that
. Next, we show that
is bounded from below by a positive constant. This requires to obtain an upper bound on
The previous inequality (
34) yields the following bound on
for
and for
By assumption
. By definition we have
and therefore
Due to the definition of
, it is uniformly bounded from above by
. Furthermore, we have that
is bounded from above due to Equation (
37) and since
d is bounded. Hence,
is bounded from below by
. Note that the
norm of the disturbances are uniformly bounded by the constant
This yields that for all
Using the previous estimate for
in Equation (
34) yields the assertion. The decay rate
of the Lyapunov function is
and
□
Some remarks are in order.
Remark 1. Note that the rate as a function of k tends to zero as k tends to one, this can be seen for example in Equation (26) defining the upper bound for Similarly, if , i.e., , we observe that due to Equation (33). The bound on is required to obtain the exponential decay. Therefore, the final rate depends on the constant R and we refer to Equation (37) and following for its detailed dependence. Note that in the case we may set and therefore no bound on W is necessary. Further, the result holds true for any solution and hence uniqueness of solutions is not required. Regarding existence of solutions, it might be possible to extend recent results [40,41,42]. However, so far existence results in the case exist [10]. Note that the decay rate η will be dependent on the bound of the disturbance as well as on R, but will be uniform with respect to provided that fulfills (12). In ([7], Lemma 3.5) it has been shown that in the case and exponential stability does not hold if For , Theorem 1 holds true for any velocity function . This case is similar to a problem studied in [10]. Therein, a detailed discussion of the case has been presented and we refer in particular to ([10], Theorem 3.1). 3. Numerical Study of Asymptotic Stability of a Scalar Conservation Law with Nonlocal Velocity and Measurement Error
In the following section, we extend the result to a proper discretization of the continuous dynamics. The following results are based on similar estimates as in the previous section and it is a minor extension of the proof presented in ([
10], Section 4.2). In order to not repeat the estimates obtained in [
10], we will use a similar notation and mostly report on the changes in estimates due to the additional disturbance
As seen in the previous proof in Equation (
24), it is possible to chose
and we will do so in the following proof directly. This simplifies the notation and reduces the technicality of the computations.
As in ([
10], Section 4.2) we introduce a first-order Upwind discretization of the closed-loop system in Equation (
8). To this end we divide the spatial domain
using an equidistant grid with cell width
and
cells such that
The cell centers are denoted by
and, the boundary of the domain are
and
, respectively. Moreover, we discretize
by
with the point wise values of the solution
. Further, we define the discrete values
by
where
denotes the discrete time such that the time step size
satisfies a stability condition due to Courant–Friedrichs–Lewy condition (CFL). This condition states that
is chosen such that
Since
for all
, we can choose a possibly small but fixed
such that the previous condition (
41) holds true for all
n with fixed
and
This choice allows to take a uniform grid in time. As in the continuous case we have
For the given initial values
with
,
, we employ a first–order finite volume scheme, given by the explicit Upwind method, to discretize the system in Equation (
8).
We now define discrete version of ISS and ISS-Lyapunov function as follows:
Definition 4. (Discrete ISS).
Let An equilibrium of the discrete closed-loop system in Equation (42) is ISS in -norm with respect to discrete disturbances , if there exist positive real constants , and such that, for every initial condition , , the solution , , to the discrete closed-loop system in Equation (42) satisfieswhere and Definition 5. (Discrete ISS-Lyapunov function).
A function is said to be a discrete ISS-Lyapunov function for the discrete closed-loop system in Equation (42) if- (i)
there exist positive constants and such that for all - (ii)
there exist positive constants and such that for all
To simplify the notation later on we will define the sequence of discrete values
by
and where
are given as solution to the system in (
42).
Theorem 2. (Discrete ISS for ) Assume that the CFL condition in Equation (41) holds. Let . For every , every , every and for every initial data with , andwhere , the solution to the system in Equation (42) satisfies , , and the steady-state of the discrete system in Equation (42) is ISS in -norm with respect any discrete disturbance function , such that In order to analyze the ISS of the discrete system in Equation (
42) by the discrete Lyapunov method, we use the following transformation
For simplicity, we omit the symbol “~” in Equation (
47) and discretize the system in Equation (
15) as follows
Thus, the assumption in Equation (
46) in Theorem 2 is now expressed as
Note that the proof of Theorem 2 is an extension of the proof of Theorem 4.2 in [
10]. Thus, some details of the proof can be found in [
10] and we will point to the corresponding estimates in order to reduce the technicality of the proof.
Proof. As in the continuous case the proof simplifies if
Therefore, we consider in the forthcoming proof only the more interesting case
Since the initial data
,
, by the discrete system in Equation (
48) and the CFL condition in Equation (
41), we have
,
,
.
Consider the following candidate stretchy="false" (
17) for any
where
. In particular, we set
a
and since
there exists
sufficiently small such that
, see ([
10], (3.25), (3.26)).
According to (
45), the values of
at the solution
at time
for
are given by
For fixed
, we assume as in [
10] there exists a
such that for
holds true and that
As a first step, we prove that
is equivalent to
This part does not dependent on the boundary condition
and is therefore analogous to [
10]. In particular, due to estimate ([
10], (4.32), (4.34)) we have for all
Due to the bounds on
a, we obtain the estimate ([
10], (4.38)) for all
where the last inequality is true provided that
Furthermore, the discrete weighted norm is equivalent to the
-norm as in ([
10], (4.39)) for all
As a second step, we estimate a finite difference approximation to the temporal derivative of
Precisely, as in [
10], we use the discrete scheme (
48), the CFL condition (
41) that ensures
and the convexity
to estimate for all
and
Then, we obtain the discrete counterpart to the integration by parts formula
Here, the last line is as in ([
10], (4.29)) except that the boundary term
that is part of
includes now the disturbance
We split the boundary condition at
as
and obtain
As in the continuous case, we estimate
and similarly for the term
and
respectively. Hence, we obtain
Next, we estimate
and
. Here, we use that
a defined by (
51),
, are bounded by
respectively, and that
and
are all bounded by one. Additionally, we have a bound on
due to (
56) and
by (
60) such that
Hence, there exists a constant
such that
and
are estimated by
A crucial estimate is now performed on
Due to the previous estimates as well as due to Equation (
70) we have that
coincides with ([
10],
) and hence we may use the same estimates ([
10], (4.31), (4.34)) to obtain
The previous estimates allow to estimate the discrete temporal derivative of
in Equation (
65) for
The last inequality holds true provided that
is sufficiently small such that (
60) and
hold true.
Finally, it remains to show that
is bounded from below by a strictly positive number. This is equivalent to show that
is bounded from above and similar to the continuous analysis. Note that due to
and therefore
Solving recursively (
76), we obtain with
The following equalities show that the last term of the previous sum can be bounded independent of
Note that since
and
fulfills the CFL condition (
41) we have that for all
and therefore
is non–negative. stretchy="false"
and due to (
59) and (
60), we have
Combing the previous estimate, (
79) and (
84), we obtain
Since the norm of
is bounded according to assumption (
49), this shows that
is bounded from above by constant
This implies that there exists a constant
such that
Note that the norm can be bounded by D by assumption.
In the last step we now use the bound on
to obtain the exponential decay of
Using (
86) in estimate (
76), we obtain for all
and
and
This concludes the proof in the discrete case. □




{kind=link}
{kind=link}