
Patron–Prophet Artificial Bee Colony Approach for Solving Numerical Continuous Optimization Problems

 ,
,  ,
, 
Abstract
:1. Introduction
- The concept of donor–acceptor, termed Patron–Prophet, is introduced to the ABC using the scout bee strategy.
- A self-adaptive model is proposed to adapt the coefficient values based on the balance between intensification and diversification.
- The introduced model is evaluated with different mathematical benchmark problems and associated with other techniques to prove its significance.
- Along with standard performance metrics and statistical performance indicators, the Wilcoxon Signed Rank test is utilized to evaluate the significance.
2. Related Works
3. Patron–Prophet Artificial Bee Colony Algorithm
3.1. Standard ABC
3.1.1. Initialization
3.1.2. Employee Bee Phase
3.1.3. Probability Calculation
| Algorithm 1: Computation of Probability Values for Every Solution. |
| Begin for = 1: perform end for End |
3.1.4. Onlooker Bee Phase
3.1.5. Scout Bee Phase
3.2. Drawbacks of Standard ABC
3.2.1. Non-Cooperative Behaviour in Scout Bee Phase
3.2.2. Non-Balanced Diversification and Intensification
3.3. Proposed Patron–Prophet ABC
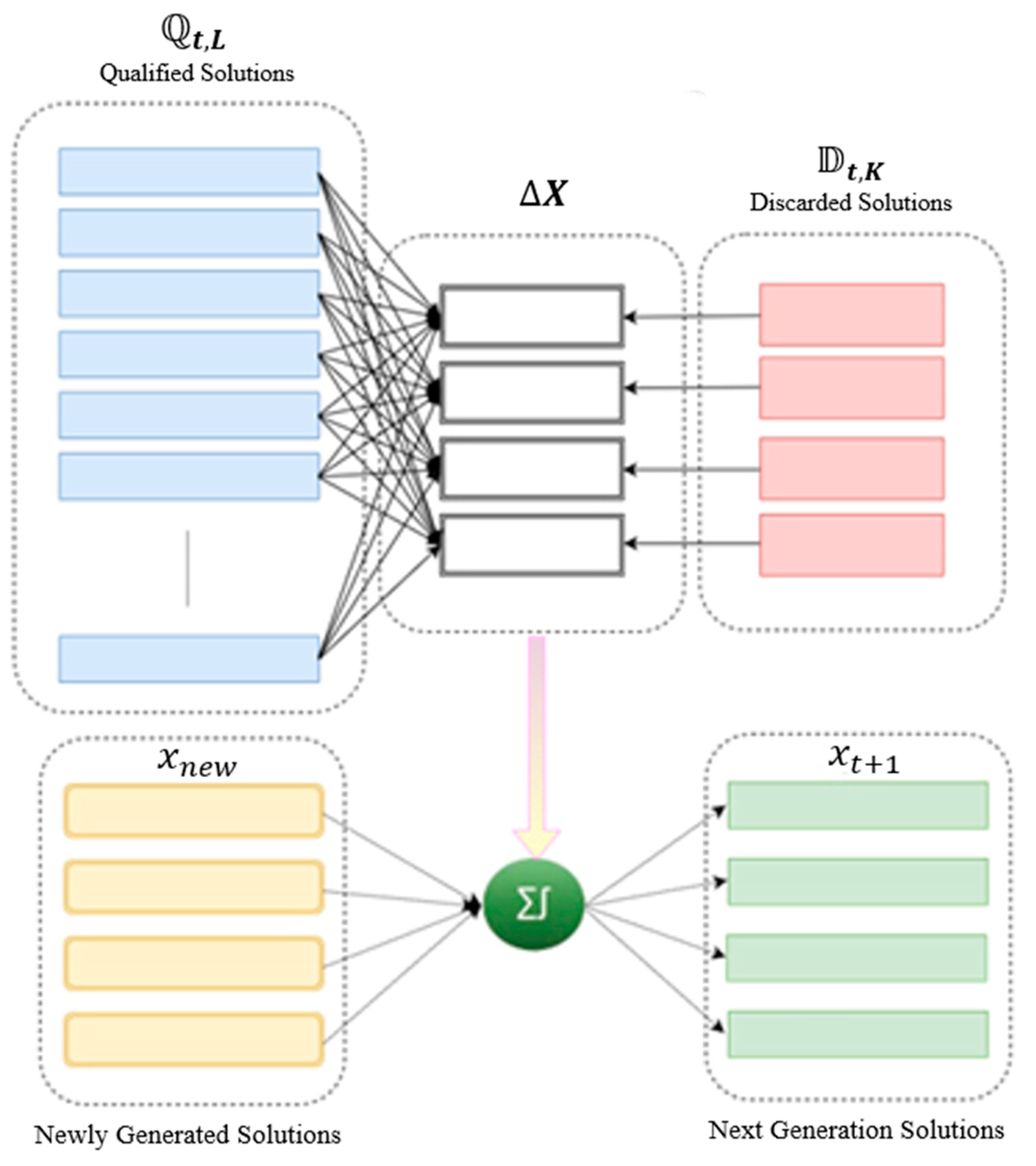
3.3.1. Patron–Prophet Strategy
3.3.2. Self-Adaptability
| Algorithm 2: PP-ABC. |
| Input: Lower and upper bound of every dimension, # of the individual in a population (), the total number of dimensions (S), Population Initialization For i = 1: , do |
| For j = 1: S, do |
| Create individual |
| End for End for |
| // Population fitness evaluation using Algorithm 1 |
| Repeat |
| { // Employee individual strategy For each , do |
| Select between and End For |
| // Onlooker individual strategy Set While () If(0,1) < with Algorithm 1, then Select between and r = r + 1 End if End while |
| // Scout individual strategy for where end |
| Remember the best individual position obtained so far |
| } |
| Until ( ) |
3.4. The Working Process of PP-ABC
4. Experimental Procedure and Result Analysis
4.1. Experimental Setup
4.1.1. Analysis of the Intensification Capability of PP-ABC
4.1.2. Analysis of Diversification Capability of PP-ABC
4.1.3. Analysis of Skipping Capability from Local Optima of PP-ABC
- A.
- Statistical analysis of the mathematical benchmark function results
4.2. Time Complexity Analysis of Patron–Prophet ABC
- Initial phase: For population initialization, the time complexity is .
- Employee bee phase: In the employee bee phase, all the individuals take part in the computation of another individual and hence the time complexity of .
- Onlooker bee phase: Only in the onlooker bee phase, the selected individuals take part in the generation of solutions for the subsequent iterations, and hence the time complexity can be an average of based on asymptotic notations, and it is expressed as .
- Scout bee phase: Only in the scout bee phase, the unimproved solutions are subject to improvisation. Since the balancing factor between intensification and diversification is handled efficiently, on every iteration, the scout bee phase obtains its computation half the way lower than the previous iteration. However, during each computation, all abandoned solutions act as a source of information for every newly generated key. Since every time the quantity of solution obtains half, we can define as and the computation in every turn of the scout bee phase is ; the final statement is and for the scout bee phase is , which results in .
- Fitness computation: The computational complexity for the fitness calculation is .
4.3. Three-Bar Truss Design Optimization Problem
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cui, L.; Li, G.; Wang, X.; Lin, Q.; Chen, J.; Lu, N.; Lu, J. A ranking-based adaptive artificial bee colony algorithm for global numerical optimization. Inform. Sci. 2017, 417, 169–185. [Google Scholar] [CrossRef]
- Wang, W.J.; Yuan, S.Q.; Pei, J.; Zhang, J.F. Optimization of the diffuser in a centrifugal pump by combining response surface method with multi-island genetic algorithm. Proc. Inst. Mech. Eng. Part E J. Process. Mech. Eng. 2017, 231, 191–201. [Google Scholar] [CrossRef]
- Liu, H.; Shi, S.; Yang, P.; Yang, J. An Improved Genetic Algorithm Approach on Mechanism Kinematic Structure Enumeration with Intelligent Manufacturing. J. Intell. Robot. Syst. 2017, 89, 343–350. [Google Scholar] [CrossRef]
- Xiaowei, H.; Xiaobo, Z.; Jiewen, Z.; Jiyong, S.; Xiaolei, Z.; Holmes, M. Measurement of total anthocyanins content in flowering tea using near infrared spectroscopy combined with ant colony optimization models. Food Chem. 2014, 164, 536–543. [Google Scholar] [CrossRef]
- Chen, X.; Tianfield, H.; Mei, C.; Du, W.; Liu, G. Biogeography-based learning particle swarm optimization. Soft Comput. 2016, 21, 7519–7541. [Google Scholar] [CrossRef]
- Yang, X.; Chen, L.; Xu, X.; Wang, W.; Xu, Q.; Lin, Y.; Zhou, Z. Parameter identification of electrochemical model for vehicular lithium-ion battery based on particle swarm optimization. Energies 2017, 10, 1811. [Google Scholar] [CrossRef]
- Nagra, A.A.; Han, F.; Ling, Q.H.; Mehta, S. An improved hybrid method combining gravitational search algorithm with dynamic multi swarm particle swarm optimization. IEEE Access 2019, 7, 50388–50399. [Google Scholar] [CrossRef]
- Wang, B.; Yu, M.; Zhu, X.; Zhu, L.; Jiang, Z. A Robust Decoupling Control Method Based on Artificial Bee Colony-Multiple Least Squares Support Vector Machine Inversion for Marine Alkaline Protease MP Fermentation Process. IEEE Access 2019, 7, 32206–32216. [Google Scholar] [CrossRef]
- Li, K.; Pan, L.; Xue, W.; Jiang, H.; Mao, H. Multi-Objective Optimization for Energy Performance Improvement of Residential Buildings: A Comparative Study. Energies 2017, 10, 245. [Google Scholar] [CrossRef]
- Chen, X.; Cai, X.; Liang, J.; Liu, Q. Ensemble Learning Multiple LSSVR With Improved Harmony Search Algorithm for Short-Term Traffic Flow Forecasting. IEEE Access 2018, 6, 9347–9357. [Google Scholar] [CrossRef]
- Wang, S.; Yu, C.; Shi, D.; Sun, X. Research on speed optimization strategy of hybrid electric vehicle queue based on particle swarm optimization. Math. Probl. Eng. 2018, 2018, 1–15. [Google Scholar] [CrossRef]
- Karaboga, D. An idea based on Honey Bee Swarm for Numerical Optimization, Erciyes University, Engineering Faculty. Comput. Eng. Dep. 2005, 12, 1–10. [Google Scholar]
- Karaboga, D.; Basturk, B. A powerful and efficient algorithm for numerical function optimization: Artificial bee colony (ABC) algorithm. J. Glob. Optim. 2007, 39, 459–471. [Google Scholar] [CrossRef]
- Shah, H.; Tairan, N.; Garg, H.; Ghazali, R.; Zhu, G.; Kwong, S. Global gbest guided-artificial bee colony algorithm for numerical function optimization. Computers 2018, 7, 69. [Google Scholar] [CrossRef]
- Karaboga, D.; Basturk, B. Artificial bee colony (ABC) optimization algorithm for solving constrained optimization problems. In International Fuzzy Systems Association World Congress; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Akay, B.; Karaboga, D. Artificial bee colony algorithm for large-scale problems and engineering design optimization. J. Intell. Manuf. 2012, 23, 1001–1014. [Google Scholar] [CrossRef]
- Garg, H. Solving structural engineering design optimization problems using an artificial bee colony algorithm. J. Ind. Manag. Optim. 2014, 10, 777–794. [Google Scholar] [CrossRef]
- Yildiz, A.R. A new hybrid artificial bee colony algorithm for robust optimal design and manufacturing. Appl. Soft Comput. 2013, 13, 2906–2912. [Google Scholar] [CrossRef]
- Rajeswari, M.; Amudhavel, J.; Pothula, S.; Dhavachelvan, P. Directed Bee Colony Optimization Algorithm to Solve the Nurse Rostering Problem. Comput. Intell. Neurosci. 2017, 2017, 1–26. [Google Scholar] [CrossRef]
- Muniyan, R.; Ramalingam, R.; Alshamrani, S.S.; Gangodkar, D.; Dumka, A.; Singh, R.; Gehlot, A.; Rashid, M. Artificial Bee Colony Algorithm with Nelder–Mead Method to Solve Nurse Scheduling Problem. Mathematics 2022, 10, 2576. [Google Scholar] [CrossRef]
- Zhu, G.; Kwong, S. Gbest-guided artificial bee colony algorithm for numerical function optimization. Appl. Math. Comput. 2010, 217, 3166–3173. [Google Scholar] [CrossRef]
- Wolpert, D.H.; Macready, W.G. No Free Lunch Theorems for Optimization. IEEE Trans. Evol. Comput. 1997, 1, 67. [Google Scholar] [CrossRef] [Green Version]
- Gould, N. An Introduction to Algorithms for Continuous Optimization; Computational Mathematics and Group: Didcot, UK, 2006. [Google Scholar]
- Gao, W.; Liu, S. Improved artificial bee colony algorithm for global optimization. Inf. Process. Lett. 2011, 111, 871–882. [Google Scholar] [CrossRef]
- Banharnsakun, A.; Achalakul, T.; Sirinaovakul, B. The best-so-far selection in Artificial Bee Colony algorithm. Appl. Soft Comput. 2011, 11, 2888–2901. [Google Scholar] [CrossRef]
- Xiang, Y.; Peng, Y.; Zhong, Y.; Chen, Z.; Lu, X.; Zhong, X. A particle swarm inspired multi-elitist artificial bee colony algorithm for real-parameteroptimization. Comput. Optim. Appl. 2014, 57, 493–516. [Google Scholar] [CrossRef]
- Gao, W.-F.; Liu, S.-Y.; Huang, L.-L. Enhancing artificial bee colony algorithm using more information-based search equations. Inf. Sci. 2014, 270, 112–133. [Google Scholar] [CrossRef]
- Gao, W.-F.; Liu, S.-Y.; Huang, L.-L. A Novel Artificial Bee Colony Algorithm Based on Modified Search Equation and Orthogonal Learning. IEEE Trans. Cybern. 2013, 43, 1011–1024. [Google Scholar]
- Karaboga, D.; Gorkemli, B. A quick artificial bee colony (qABC) algorithm and its performance on optimization problems. Appl. Soft Comput. 2014, 23, 227–238. [Google Scholar] [CrossRef]
- Wang, H.; Wu, Z.; Rahnamayan, S.; Sun, H.; Liu, Y.; Pan, J.-S. Multi-strategy ensemble artificial bee colony algorithm. Inf. Sci. 2014, 279, 587–603. [Google Scholar] [CrossRef]
- Kıran, M.S.; Fındık, O. A directed artificial bee colony algorithm. Appl. Soft Comput. 2015, 26, 454–462. [Google Scholar] [CrossRef]
- Kiran, M.S.; Hakli, H.; Gunduz, M.; Uguz, H. Artificial bee colony algorithm with variable search strategy for continuous optimization. Inform. Sci. 2015, 300, 140–157. [Google Scholar] [CrossRef]
- Chu, X.; Cai, F.; Gao, D.; Li, L.; Cui, J.; Xu, S.X.; Qin, Q. An artificial bee colony algorithm with adaptive heterogeneous competition for global optimization problems. Appl. Soft Comput. 2020, 93, 106391. [Google Scholar] [CrossRef]
- Yavuz, G.; Aydın, D. Improved Self-adaptive Search Equation-based Artificial Bee Colony Algorithm with competitive local search strategy. Swarm Evol. Comput. 2019, 51, 100582. [Google Scholar] [CrossRef]
- Song, X.; Zhao, M.; Yan, Q.; Xing, S. A high-efficiency adaptive artificial bee colony algorithm using two strategies for continuous optimization. Swarm Evol. Comput. 2019, 50, 100549. [Google Scholar] [CrossRef]
- Lu, R.; Hu, H.; Xi, M.; Gao, H.; Pun, C.-M. An improved artificial bee colony algorithm with fast strategy, and its application. Comput. Electr. Eng. 2019, 78, 79–88. [Google Scholar] [CrossRef]
- Gao, W.-F.; Huang, L.-L.; Wang, J.; Liu, S.-Y.; Qin, C.-D. Enhanced artificial bee colony algorithm through differential evolution. Appl. Soft Comput. 2016, 48, 137–150. [Google Scholar] [CrossRef]
- Cui, L.; Li, G.; Zhu, Z.; Lin, Q.; Wen, Z.; Lu, N.; Wong, K.-C.; Chen, J. A novel artificial bee colony algorithm with an adaptive population size for numerical function optimization. Inf. Sci. 2017, 414, 53–67. [Google Scholar] [CrossRef]
- Li, G.; Cui, L.; Fu, X.; Wen, Z.; Lu, N.; Lu, J. Artificial bee colony algorithm with gene recombination for numerical function optimization. Appl. Soft Comput. 2017, 52, 146–159. [Google Scholar] [CrossRef]
- Xue, Y.; Jiang, J.; Zhao, B.; Ma, T. A self-adaptive artificial bee colony algorithm based on global best for global optimization. Soft Comput. 2017, 22, 2935–2952. [Google Scholar] [CrossRef]
- Cui, L.; Li, G.; Luo, Y.; Chen, F.; Ming, Z.; Lu, N.; Lu, J. An enhanced artificial bee colony algorithm with dual-population framework. Swarm Evol. Comput. 2018, 43, 184–206. [Google Scholar] [CrossRef]
- Gao, W.; Wei, Z.; Luo, Y.; Cao, J. Artificial bee colony algorithm based on Parzen window method. Appl. Soft Comput. 2019, 74, 679–692. [Google Scholar] [CrossRef]
- Wang, H.; Wang, W.; Xiao, S.; Cui, Z.; Xu, M.; Zhou, X. Improving artificial Bee colony algorithm using a new neighborhood selection mechanism. Inf. Sci. 2020, 527, 227–240. [Google Scholar] [CrossRef]
- Wang, H.; Wang, W.; Zhou, X.; Zhao, J.; Wang, Y.; Xiao, S.; Xu, M. Artificial bee colony algorithm based on knowledge fusion. Complex Intell. Syst. 2020, 7, 1139–1152. [Google Scholar] [CrossRef]
- Yang, J.; Cui, J.; Zhang, Y.-D. Artificial bee colony algorithm with adaptive covariance matrix for hearing loss detection. Knowledge-Based Syst. 2021, 216, 106792. [Google Scholar] [CrossRef]
- Xu, M.; Wang, W.; Wang, H.; Xiao, S.; Huang, Z. Multipopulation artificial bee colony algorithm based on a modified probability selection model. Concurr. Comput. Pr. Exp. 2021, 33, e6216. [Google Scholar] [CrossRef]
- Rajesh, K.; Pyne, S. A hybrid artificial bee colony algorithm for scheduling of digital microfluidic biochip operations. Concurr. Comput. Pr. Exp. 2021, 33, e6223. [Google Scholar] [CrossRef]
- Anguraj, D.K.; Thirugnanasambandam, K. Enriched cluster head selection using augmented bifold cuckoo search algorithm for edge-based internet of medical things. Int. J. Commun. Syst. 2021, 34, e4817. [Google Scholar] [CrossRef]
- Thirugnanasambandam, K.; Sudha, S.; Saravanan, D.; Ravi, R.V.; Anguraj, D.K.; Raghav, R. Reinforced Cuckoo Search based fugitive landfill methane emission estimation. Environ. Technol. Innov. 2020, 21, 101207. [Google Scholar] [CrossRef]
- Rajeswari, M.; Thirugnanasambandam, K.; Raghav, R.S.; Prabu, U.; Saravanan, D.; Anguraj, D.K. Flower Pollination Algorithm with Powell’s Method for the Minimum Energy Broadcast Problem in Wireless Sensor Network. Wirel. Pers. Commun. 2021, 119, 1111–1135. [Google Scholar] [CrossRef]
- Thirugnanasambandam, K.; Anitha, R.; Enireddy, V.; Raghav, R.S.; Anguraj, D.K.; Arivunambi, A. Pattern mining technique derived ant colony optimization for document information retrieval. J. Ambient Intell. Humaniz. Comput. 2021, 12, 1–13. [Google Scholar] [CrossRef]
- Thirugnanasambandam, K.; Raghav, R.S.; Loganathan, J.; Dumka, A.; Dhilipkumar, V. Optimal path planning for intelligent automated wheelchair using DDSRPSO. Int. J. Pervasive Comput. Commun. 2020, 17, 109–120. [Google Scholar] [CrossRef]
- Koti, P.; Dhavachelvan, P.; Kalaipriyan, T.; Arjunan, S.; Uthayakumar, J.; Sujatha, P. An efficient healthcare framework for kidney disease using hybrid harmony search algorithm. Electron. Gov. Int. J. 2020, 16, 56–68. [Google Scholar] [CrossRef]
- Saravanan, D.; Janakiraman, S.; Chandraprabha, K.; Kalaipriyan, T.; Raghav, R.S.; Venkatesan, S. Augmented Powell-Based Krill Herd Optimization for Roadside Unit Deployment in Vehicular Ad Hoc Networks. J. Test. Eval. 2019, 47, 4108–4127. [Google Scholar] [CrossRef]
- Xu, Y.; Wang, X. An artificial bee colony algorithm for scheduling call centres with weekend-off fairness. Appl. Soft Comput. 2021, 109, 107542. [Google Scholar] [CrossRef]
- Cui, Y.; Hu, W.; Rahmani, A. A reinforcement learning based artificial bee colony algorithm with application in robot path planning. Expert Syst. Appl. 2022, 203, 117389. [Google Scholar] [CrossRef]
- Tao, X.R.; Pan, Q.K.; Gao, L. An efficient self-adaptive artificial bee colony algorithm for the distributed resource-constrained hybrid flowshop problem. Comput. Ind. Eng. 2022, 169, 108200. [Google Scholar] [CrossRef]
- Yavuz, G.; Durmuş, B.; Aydın, D. Artificial Bee Colony Algorithm with Distant Savants for constrained optimization. Appl. Soft Comput. 2021, 116, 108343. [Google Scholar] [CrossRef]
- Szczepanski, R.; Erwinski, K.; Tejer, M.; Bereit, A.; Tarczewski, T. Optimal scheduling for palletizing task using robotic arm and artificial bee colony algorithm. Eng. Appl. Artif. Intell. 2022, 113, 104976. [Google Scholar] [CrossRef]
- Ghambari, S.; Rahati, A. An improved artificial bee colony algorithm and its application to reliability optimization problems. Appl. Soft Comput. 2018, 62, 736–767. [Google Scholar] [CrossRef]
- Thirugnanasambandam, K.; Prakash, S.; Subramanian, V.; Pothula, S.; Thirumal, V. Reinforced cuckoo search algorithm-based multimodal optimization. Appl. Intell. 2019, 49, 2059–2083. [Google Scholar] [CrossRef]
- Lin, X.; Yu, X.; Li, W. A heuristic whale optimization algorithm with niching strategy for global multi-dimensional engineering optimization. Comput. Ind. Eng. 2022, 171, 108361. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Method |
|---|---|
| Individuals in a population | 30 |
| 10 & 30 | |
| Termination Criteria () | 1000 × D |
| Runs | 25 |
| 1 | |
| 2 | |
| 0.1 (initially) | |
| 2 |
| Function | Mathematical Formulation | Global Optimum | Range |
|---|---|---|---|
| F1 | 0 | [−100, 100]D | |
| F2 | 0 | [−100, 100]D | |
| F3 | (1, 1 …, 1) | [−100, 100]D | |
| F4 | 0 | [−100, 100]D | |
| F5 | 0 | [−32, 32]D | |
| F6 | 0 | [−32, 32]D | |
| F7 | 0 | [0, 600]D | |
| F8 | 0 | [0, 600]D | |
| F9 | 0 | [−5, 5]D | |
| F10 | 0 | [−5, 5]D | |
| F11 | (420.96, …, 420.96) | [−500, 500]D | |
| F12 | 0 | [−50, 50]D | |
| F13 | 0 | [−50, 50]D | |
| F14 | Ten sphere functions | 0 | [−5, 5]D |
| F15 | Ten different benchmark functions (i.e., 2 rotated Rastrigin’s procedures, 2 rotated Weier stress functions, 2 rotated Griewank’s procedures, 2 rotated Ackley’s procedures, and two turned Sphere functions) | 0 | [−5, 5]D |
| Patron–Prophet | Self-Adaptability | |||||
|---|---|---|---|---|---|---|
| Min | Mean | Std.dev. | Min | Mean | Std.dev. | |
| F1 | 0 | 0 | 0 | 0 | 0 | 0 |
| F2 | 0 | 0 | 0 | 1.26 × 100 | 3.45 × 100 | 3.56 × 100 |
| F3 | 1.13 × 10−6 | 3.11 × 10−6 | 1.34 × 10−8 | 5.22 × 10−5 | 3.26 × 10−1 | 7.27 × 10−1 |
| F4 | 4.76 × 10−10 | 7.90 × 10−4 | 3.24 × 10−6 | 5.87 × 10−8 | 8.01 × 10−6 | 4.36 × 10−2 |
| F5 | 0 | 8.65 × 10−14 | 4.62 × 10−16 | 0 | 1.14 × 10−14 | 9.62 × 10−12 |
| F6 | 6.83 × 10−6 | 3.76 × 10−5 | 4.60 × 10−6 | 7.94 × 10−6 | 4.87 × 10−6 | 5.60 × 10−5 |
| F7 | 0 | 6.47 × 10−8 | 3.70 × 10−10 | 0 | 7.58 × 10−9 | 4.71 × 10−9 |
| F8 | 3.72 × 10−5 | 9.26 × 10−1 | 2.53 × 10−2 | 4.83 × 10−4 | 6.37 × 10−3 | 3.64 × 10−1 |
| F9 | 0 | 0 | 0 | 0 | 0 | 0 |
| F10 | 4.86 × 100 | 6.45 × 100 | 3.76 × 100 | 5.12 × 100 | 6.21 × 100 | 4.12 × 100 |
| F11 | 0 | 0 | 0 | 0 | 0 | 0 |
| F12 | 0 | 2.09 × 10−32 | 3.75 × 10−32 | 0 | 3.10 × 10−31 | 4.77 × 10−28 |
| F13 | 2.23 × 10−42 | 2.76 × 10−30 | 2.61 × 10−25 | 3.34 × 10−40 | 3.87 × 10−32 | 3.72 × 10−32 |
| F14 | 6.97 × 10−6 | 6.75 × 10−6 | 2.70 × 10−6 | 9.66 × 10−7 | 3.85 × 10−8 | 5.42 × 10−6 |
| F15 | 1.62 × 10−1 | 3.65 × 10−1 | 1.15 × 100 | 7.23 × 10−1 | 5.44 × 10−1 | 6.21 × 100 |
| PP-ABC | DGABC | APABC | ABC | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Min | Mean | Std.dev | Min | Mean | Std.dev | Min | Mean | Std.dev | Min | Mean | Std.dev | |
| F1 | 0 | 0 | 0 | 0 | 2.22 × 10−21 | 2.0 × 10−21 | 0 | 0 | 0 | 0 | 0 | 0 |
| F2 | 0 | 0 | 0 | 0 | 1.47 × 10−10 | 6.94 × 10−11 | 2.66 × 10−2 | 9.14 × 10−2 | 6.99 × 10−2 | 2.46 × 100 | 5.75 × 100 | 2.54 × 100 |
| F3 | 4.58 × 10−8 | 2.56 × 10−2 | 5.24 × 10−2 | 3.97 × 100 | 4.55 × 100 | 1.96 × 100 | 1.03 × 10−2 | 7.21 × 10−1 | 6.21 × 10−1 | 8.57 × 10−3 | 3.97 × 10−1 | 2.85 × 10−1 |
| F4 | 3.65 × 10−12 | 6.89 × 10−5 | 2.14 × 10−5 | 9.86 × 10−7 | 4.54 × 10−5 | 2.51 × 10−5 | 8.55 × 10−1 | 3.21× 10−1 | 2.39× 10−1 | 2.54 × 102 | 4.25 × 102 | 2.11 × 102 |
| F5 | 0 | 9.54 × 10−16 | 3.51 × 10−18 | 6.90 × 10−7 | 5.35 × 10−5 | 2.00 × 10−3 | 0 | 5.65 × 10−15 | 1.90 × 10−15 | 5.45 × 10−17 | 7.65× 10−15 | 2.50 × 10−14 |
| F6 | 5.72 × 10−8 | 2.65 × 10−7 | 3.59 × 10−7 | 1.14 × 10−9 | 2.61 × 10−8 | 3.75 × 10−8 | 5.27 × 10−8 | 3.52 × 10−7 | 5.95 × 10−7 | 2.65 × 10−1 | 3.52 × 10−1 | 4.52 × 10−1 |
| F7 | 0 | 5.36 × 10−10 | 2.69 × 10−10 | 5.12 × 10−2 | 7.64 × 10−2 | 2.99 × 10−2 | 7.66 × 10−8 | 2.02 × 10−7 | 2.65 × 10−7 | 5.74 × 10−4 | 2.65 × 10−3 | 4.96 × 10−3 |
| F8 | 2.61 × 10−5 | 8.15 × 10−2 | 1.42 × 10−2 | 7.59 × 10−2 | 9.55 × 10−2 | 2.65 × 10−2 | 1.16 × 10−1 | 1.21 × 10−1 | 4.65 × 10−2 | 3.86 × 10−2 | 8.65 × 10−2 | 3.75 × 10−2 |
| F9 | 0 | 0 | 0 | 5.21 × 100 | 6.75 × 100 | 2.01 × 100 | 0 | 0 | 0 | 0 | 0 | 0 |
| F10 | 4.35 × 100 | 7.36 × 100 | 2.65 × 100 | 1.21 × 101E+01 | 1.45 × 101 | 3.55 × 100 | 4.27 × 100 | 9.95 × 100 | 1.97 × 100 | 1.19 × 101 | 3.26 × 101 | 1.30 × 101 |
| F11 | 0 | 0 | 0 | 2.21 × 102 | 3.93 × 102 | 1.92 × 102 | 0 | 0 | 0 | 0 | 0 | 0 |
| F12 | 0 | 1.98× 100 | 2.65 × 10−40 | 9.55 × 10−17 | 6.93 × 10−16 | 2.33 × 10−15 | 0 | 4.82 × 10−32 | 1.65 × 10−46 | 1.26 × 10−32 | 4.99 × 10−32 | 4.42 × 10−32 |
| F13 | 1.12 × 10−46 | 1.65 × 10−27 | 1.50 × 10−26 | 1.15 × 10−19 | 1.75 × 10−19 | 3.54 × 10−19 | 0 | 1.89 × 10−3 | 1.05 × 10−32 | 0.00 × 100 | 1.66 × 10−32 | 2.97 × 10−48 |
| F14 | 7.86 × 10−8 | 5.64 × 10−7 | 1.69 × 10−7 | 2.66 × 10−7 | 4.75 × 10−7 | 1.85 × 10−6 | 4.79 × 10−3 | 2.55 × 10−2 | 6.97 × 10−2 | 1.55 × 10−4 | 3.85 × 10−4 | 1.20 × 10−3 |
| F15 | 9.57 × 10−2 | 2.54 × 10−1 | 9.85 × 10−1 | 5.48 × 10−1 | 2.01 × 100 | 9.55 × 10−1 | 1.88 × 100 | 5.94 × 100 | 3.98 × 100 | 1.36 × 101 | 1.59 × 101 | 6.46 × 100 |
| ACoM-ABC | SABC-SG | KFABC | MPABC | |||||||||
| Min | Mean | Std.dev | Min | Mean | Std.dev | Min | Mean | Std.dev | Min | Mean | Std.dev | |
| F1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| F2 | 1.12 × 10−23 | 1.55 × 10−23 | 3.56 × 10−23 | 0 | 0 | 0 | 2.61 × 10−12 | 6.52 × 10−12 | 2.64 × 10−13 | 0 | 0 | 0 |
| F3 | 1.64 × 10−7 | 2.45 × 10−7 | 7.34 × 10−8 | 2.69 × 10−7 | 2.45 × 10−6 | 7.34 × 10−7 | 2.57 × 10−6 | 7.32 × 10−6 | 9.82 × 10−7 | 8.37 × 10−6 | 5.47 × 10−5 | 4.57 × 10−6 |
| F4 | 4.62 × 10−21 | 9.68 × 10−21 | 3.52 × 10−22 | 5.92 × 10−18 | 8.72 × 10−18 | 2.32 × 10−19 | 6.47 × 10−10 | 8.12 × 10−10 | 6.25 × 10−11 | 3.97 × 10−7 | 5.47 × 10−6 | 2.64 × 10−7 |
| F5 | 0 | 0 | 0 | 6.38 × 10−13 | 9.42 × 10−12 | 4.25 × 10−13 | 2.46 × 10−11 | 3.64 × 10−11 | 9.24 × 10−12 | 4.57 × 10−15 | 6.54 × 10−15 | 9.87 × 10−16 |
| F6 | 3.62 × 10−15 | 3.62 × 10−15 | 0 | 4.62 × 10−3 | 4.62 × 10−3 | 0 | 2.64 × 10−2 | 7.58 × 10−2 | 5.62 × 10−2 | 6.42 × 10−3 | 7.24 × 10−3 | 4.68× 10−4 |
| F7 | 0 | 0 | 0 | 6.25 × 10−6 | 8.27 × 10−5 | 6.24 × 10−5 | 5.12 × 10−2 | 8.36 × 10−2 | 6.25 × 10−3 | 2.64 × 10−2 | 5.92 × 10−2 | 5.14 × 10−2 |
| F8 | 2.47 × 10−2 | 5.24 × 10−2 | 2.40 × 10−2 | 6.30 × 10−2 | 7.21 × 10−1 | 2.61 × 10−2 | 2.47 × 10−1 | 5.93 × 10−1 | 6.42 × 10−1 | 2.61 × 10−2 | 8.15 × 10−2 | 1.42 × 10−3 |
| F9 | 0 | 0 | 0 | 2.62 × 100 | 5.84 × 100 | 2.14 × 100 | 4.95 × 100 | 1.26 × 101 | 7.35 × 100 | 0 | 0 | 0 |
| F10 | 8.24 × 100 | 1.27 × 101 | 2.70 × 100 | 1.26 × 101 | 2.74 × 101 | 1.64 × 101 | 1.62 × 101 | 2.94 × 101 | 1.57 × 101 | 1.50 × 101 | 2.65 × 101 | 1.43 × 101 |
| F11 | 1.40 × 102 | 2.28 × 102 | 4.26 × 101 | 2.67 × 102 | 3.64 × 102 | 1.24 × 102 | 0 | 0 | 0 | 2.64 × 10−16 | 7.65 × 10−16 | 5.61 × 10−16 |
| F12 | 3.67 × 10−32 | 5.65 × 10−32 | 1.96 × 10−47 | 6.47 × 10−16 | 7.57 × 10−15 | 5.47 × 10−16 | 2.28 × 10−24 | 2.28 × 10−24 | 0 | 3.47 × 10−32 | 6.49 × 10−32 | 4.62 × 10−38 |
| F13 | 1.74 × 10−32 | 2.64 × 10−32 | 2.52 × 10−48 | 1.82 × 10−16 | 5.62 × 10−16 | 3.43 × 10−32 | 1.54 × 10−19 | 4.62 × 10−19 | 7.52 × 10−20 | 2.64 × 10−24 | 7.53 × 10−24 | 2.67 × 10−25 |
| F14 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 5.62 × 10−2 | 8.62 × 10−2 | 1.69 × 10−3 |
| F15 | 1.70 × 10−1 | 5.20 × 10−1 | 9.10 × 10−1 | 6.40 × 10−1 | 7.60 × 10−1 | 2.60 × 10−2 | 5.61 × 100 | 1.25 × 101 | 4.64 × 100 | 1.24 × 100 | 5.62 × 100 | 2.50 × 100 |
| PP-ABC | DGABC | APABC | ABC | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Min | Mean | Std.dev | Min | Mean | Std.dev | Min | Mean | Std.dev | Min | Mean | Std.dev | |
| F1 | 0 | 0 | 0 | 2.21 × 10−24 | 2.87 × 10−23 | 2.65 × 10−23 | 0 | 0 | 0 | 0 | 0 | 0 |
| F2 | 1.26 × 10−1 | 4.75 × 10−1 | 1.47 × 101 | 1.09 × 10−1 | 3.55 × 10−1 | 2.46 × 10−1 | 6.39 × 102 | 7.85 × 102 | 1.45 × 102 | 2.07 × 103 | 3.21 × 103 | 1.15 × 103 |
| F3 | 1.97 × 10−2 | 6.75 × 10−1 | 6.55 × 10−1 | 1.36 × 101 | 2.46 × 101 | 7.45 × 100 | 6.93× 10−1 | 4.55 × 100 | 3.85 × 100 | 6.87 × 10−6 | 5.47 × 10−4 | 3.46× 10−5 |
| F4 | 5.48 × 102 | 1.56 × 103 | 5.68 × 102 | 1.27 × 103 | 2.13 × 103 | 8.55 × 102 | 6.86× 103 | 7.96 × 103 | 1.13 × 103 | 2.32 × 104 | 2.87 × 104 | 5.48 × 103 |
| F5 | 1.64 × 10−14 | 1.95 × 10−14 | 3.15 × 10−15 | 5.82 × 10−3 | 7.46 × 10−2 | 2.11 × 10−1 | 2.96 × 10−25 | 5.70 × 10−24 | 6.98 × 10−23 | 5.48 × 10−16 | 3.48 × 10−15 | 3.66 × 10−15 |
| F6 | 5.87 × 10−15 | 5.87 × 10−15 | 0 | 6.48 × 10−11 | 2.66 × 10−10 | 9.02 × 10−10 | 5.78 × 10−4 | 3.25 × 10−3 | 3.25 × 10−3 | 1.71× 101 | 1.80 × 101 | 8.65 × 10−1 |
| F7 | 0 | 0 | 0 | 2.87 × 10−18 | 1.66 × 10−17 | 5.70 × 10−17 | 4.69 × 10−14 | 2.55 × 10−17 | 7.54 × 10−17 | 0 | 0 | 0 |
| F8 | 0 | 0 | 0 | 1.02 × 10−3 | 1.56 × 10−3 | 2.58 × 10−3 | 9.87 × 10−4 | 3.59 × 10−2 | 1.99 × 10−2 | 3.29 × 10−5 | 1.99 × 10−4 | 1.66 × 10−4 |
| F9 | 0 | 0 | 0 | 4.28 × 101 | 4.94 × 101 | 6.55 × 100 | 0 | 0 | 0 | 0 | 0 | 0 |
| F10 | 1.97 × 101 | 5.75 × 101 | 2.69 × 101 | 1.13 × 102 | 1.28 × 102 | 1.54 × 101 | 7.80 × 1011 | 9.47 × 101 | 1.67 × 101 | 2.67 × 102 | 2.96 × 102 | 2.97 × 101 |
| F11 | 0 | 0 | 0 | 3.09 × 103 | 3.66 × 103 | 4.12 × 102 | 5.72 × 10−14 | 1.99 × 10−13 | 6.11 × 10−13 | 9.72 × 10−13 | 1.54 × 10−12 | 5.70 × 10−13 |
| F12 | 5.43 × 10−56 | 5.48 × 10−56 | 1.75 × 10−64 | 1.15 × 10−2 | 2.55 × 10−2 | 3.70 × 10−2 | 4.63 × 10−32 | 2.66 × 10−31 | 2.70 × 10−31 | 1.7 × 10−32 | 1.70 × 10−32 | 5.69 × 10−49 |
| F13 | 1.76 × 10−17 | 1.78 × 10−17 | 2.46 × 10−27 | 3.56 × 10−17 | 1.57 × 10−17 | 5.13 × 10−17 | 2.87 × 10−31 | 1.60 × 10−30 | 1.31 × 10−30 | 1.52 × 10−32 | 1.52 × 10−32 | 2.66 × 10−48 |
| F14 | 0 | 0 | 0 | 2.09 × 10−13 | 5.68 × 10−14 | 2.66 × 10−13 | 4.95 × 10−7 | 1.25 × 10−6 | 3.01 × 10−6 | 0 | 0 | 0 |
| F15 | 4.87 × 100 | 1.60 × 101 | 5.69 × 100 | 1.55 × 101 | 2.07 × 101 | 5.15 × 100 | 5.58 × 100 | 7.57 × 100 | 1.99 × 100 | 1.07 × 100 | 1.36 × 101 | 2.87 × 100 |
| ACoM-ABC | SABC-SG | KFABC | MPABC | |||||||||
| Min | Mean | Std.dev | Min | Mean | Std.dev | Min | Mean | Std.dev | Min | Mean | Std.dev | |
| F1 | 0 | 0 | 0 | 0 | 0 | 0 | 4.22 × 10−6 | 5.24 × 10−6 | 3.66 × 10−6 | 0 | 0 | 0 |
| F2 | 2.57 × 10−5 | 9.46 × 10−5 | 7.88 × 10−5 | 2.54 × 100 | 1.82 × 101 | 1.45 × 101 | 3.64 × 100 | 2.16 × 101 | 1.65 × 101 | 2.65 × 100 | 3.54 × 100 | 1.25 × 100 |
| F3 | 5.54 × 10−2 | 5.66 × 10−2 | 3.52 × 10−3 | 5.47 × 100 | 6.54 × 100 | 1.25 × 100 | 8.37 × 100 | 9.54 × 100 | 2.54 × 100 | 0 | 2.65 × 10−30 | 5.82 × 10−30 |
| F4 | 1.25 × 103 | 1.6 × 103 | 2.0× 102 | 8.5 × 102 | 1.46× 103 | 5.36 × 103 | 9.47 × 103 | 1.76 × 103 | 6.87 × 103 | 9.56 × 102 | 1.53 × 103 | 2.74 × 102 |
| F5 | 2.54 × 10−13 | 4.89 × 10−13 | 1.96 × 10−13 | 5.65 × 10−9 | 8.24 × 10−9 | 3.54 × 10−9 | 3.65 × 10−10 | 6.74 × 10−10 | 4.74 × 10−11 | 7.25 × 10−10 | 9.15 × 10−9 | 4.25 × 10−9 |
| F6 | 4.13 × 10−15 | 4.13 × 10−15 | 0 | 2.47 × 10−11 | 7.41 × 10−11 | 4.21 × 10−12 | 4.57 × 10−9 | 4.57 × 10−9 | 0 | 8.88 × 10−16 | 8.88 × 10−16 | 0 |
| F7 | 0 | 0 | 0 | 3.65 × 10−12 | 5.96 × 10−12 | 2.34 × 10−13 | 0 | 0 | 0 | 0 | 0 | 0 |
| F8 | 0 | 0 | 0 | 7.00 × 10−5 | 9.87 × 10−5 | 6.47 × 10−6 | 7.00 × 10−5 | 9.87 × 10−5 | 6.47 × 10−6 | 0 | 0 | 0 |
| F9 | 0 | 0 | 0 | 1.75 × 101 | 2.98 × 101 | 1.24 × 101 | 2.14 × 101 | 3.65 × 10−1 | 1.15 × 101 | 0 | 0 | 0 |
| F10 | 8.15 × 101 | 9.16 × 10−1 | 2.04 × 101 | 4.60 × 101 | 7.85 × 101 | 1.16 × 101 | 0 | 0 | 0 | 5.42 × 101 | 6.51 × 101 | 2.15 × 101 |
| F11 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| F12 | 2.65 × 10−32 | 2.88 × 10−32 | 2.34 × 10−47 | 2.64 × 10−26 | 6.57 × 10−26 | 7.68 × 10−42 | 3.65 × 10−18 | 8.24 × 10−18 | 5.43 × 10−32 | 1.57 × 10−32 | 1.57 × 10−32 | 5.24 × 10−48 |
| F13 | 1.66 × 10−16 | 2.68 × 10−16 | 2.70 × 10−25 | 6.92 × 10−8 | 9.38 × 10−8 | 1.26 × 10−10 | 4.28 × 10−10 | 6.47 × 10−10 | 2.67 × 10−11 | 5.47 × 10−12 | 8.75 × 10−12 | 1.11 × 10−12 |
| F14 | 0 | 0 | 0 | 5.97 × 10−12 | 7.54 × 10−12 | 1.62 × 10−12 | 2.21 × 10−14 | 4.92 × 10−14 | 1.21 × 10−15 | 0 | 0 | 0 |
| F15 | 1.05 × 101 | 1.27 × 101 | 3.25 | 1.86 × 101 | 5.72 × 101 | 2.65 × 101 | 2.13 × 101 | 6.41 × 101 | 2.67 × 101 | 7.54 × 100 | 1.25 × 101 | 3.21 × 100 |
| Function | PP-ABC vs DGABC | PP-ABC vs APABC | PP-ABC vs ABC | |||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| p-Value | T+ | T− | Winner | p-Value | T+ | T− | Winner | p-Value | T+ | T− | Winner | |||||||||||||||||
| F1 | 0 | 0 | 465 | + | 1 | 0 | 0 | = | 1 | 0 | 0 | = | ||||||||||||||||
| F2 | 0 | 0 | 465 | + | 0 | 0 | 465 | + | 0 | 0 | 465 | + | ||||||||||||||||
| F3 | 0 | 0 | 465 | + | 0 | 0 | 465 | + | 0 | 0 | 465 | + | ||||||||||||||||
| F4 | 3.38 × 10−3 | 375 | 90 | − | 0 | 0 | 465 | + | 0 | 0 | 465 | + | ||||||||||||||||
| F5 | 0 | 0 | 465 | + | 2.88 × 10−6 | 5 | 460 | + | 0 | 0 | 465 | + | ||||||||||||||||
| F6 | 0 | 465 | 0 | − | 6.42 × 10−3 | 100 | 365 | + | 0 | 0 | 465 | + | ||||||||||||||||
| F7 | 0 | 0 | 465 | + | 0 | 0 | 465 | + | 0 | 0 | 465 | + | ||||||||||||||||
| F8 | 1.83 × 10−3 | 81 | 384 | + | 1.80 × 10−5 | 24 | 441 | + | 4.68 × 10−3 | 95 | 370 | + | ||||||||||||||||
| F9 | 0 | 0 | 465 | + | 1 | 0 | 0 | = | 1 | 0 | 0 | = | ||||||||||||||||
| F10 | 0 | 0 | 465 | + | 4.11 × 10−3 | 93 | 372 | + | 0 | 0 | 465 | + | ||||||||||||||||
| F11 | 0 | 0 | 465 | + | 1 | 0 | 0 | = | 1 | 0 | 0 | = | ||||||||||||||||
| F12 | 0 | 0 | 465 | + | 0 | 0 | 465 | + | 0 | 0 | 465 | + | ||||||||||||||||
| F13 | 0 | 0 | 465 | + | 0 | 465 | 0 | − | 0 | 465 | 0 | − | ||||||||||||||||
| F14 | 3.7 × 10−2 | 276 | 189 | − | 0 | 0 | 465 | + | 0 | 0 | 465 | + | ||||||||||||||||
| F15 | 0 | 0 | 465 | + | 0 | 0 | 465 | + | 0 | 0 | 465 | + | ||||||||||||||||
| +/=/− | 12/0/3 | 11/3/1 | 11/3/1 | |||||||||||||||||||||||||
| Function | PP-ABC vs ACoM-ABC | PP-ABC vs SABC-SG | PP-ABC vs KFABC | PP-ABC vs MPABC | ||||||||||||||||||||||||
| p-Value | T+ | T− | Winner | p-Value | T+ | T− | Winner | p-Value | T+ | T− | Winner | p-Value | T+ | T− | Winner | |||||||||||||
| F1 | 1 | 0 | 0 | = | 1 | 0 | 0 | = | 1 | 0 | 0 | = | 1 | 0 | 0 | = | ||||||||||||
| F2 | 0 | 0 | 465 | + | 1 | 0 | 0 | = | 0 | 0 | 465 | + | 1 | 0 | 0 | = | ||||||||||||
| F3 | 0 | 465 | 0 | − | 0 | 465 | 0 | − | 0 | 465 | 0 | − | 0 | 465 | 0 | − | ||||||||||||
| F4 | 0 | 465 | 0 | − | 0 | 465 | 0 | − | 0 | 465 | 0 | − | 3.52 × 10−4 | 458 | 7 | − | ||||||||||||
| F5 | 0 | 465 | 0 | − | 0 | 0 | 465 | + | 0 | 0 | 465 | + | 0 | 0 | 465 | + | ||||||||||||
| F6 | 0 | 0 | 465 | + | 0 | 0 | 465 | + | 0 | 0 | 465 | + | 0 | 0 | 465 | + | ||||||||||||
| F7 | 0 | 465 | 0 | − | 0 | 0 | 465 | + | 0 | 0 | 465 | + | 0 | 0 | 465 | + | ||||||||||||
| F8 | 0 | 0 | 465 | + | 0 | 0 | 465 | + | 0 | 0 | 465 | + | 0 | 0 | 465 | + | ||||||||||||
| F9 | 1 | 0 | 0 | = | 0 | 0 | 465 | + | 0 | 0 | 465 | + | 1 | 0 | 0 | = | ||||||||||||
| F10 | 2.35 × 10−6 | 3 | 462 | + | 0 | 0 | 465 | + | 0 | 0 | 465 | + | 0 | 0 | 465 | + | ||||||||||||
| F11 | 0 | 0 | 465 | + | 0 | 0 | 465 | + | 1 | 0 | 0 | = | 0 | 0 | 465 | + | ||||||||||||
| F12 | 0 | 0 | 465 | + | 0 | 0 | 465 | + | 0 | 0 | 465 | + | 0 | 0 | 465 | + | ||||||||||||
| F13 | 0 | 0 | 465 | + | 0 | 0 | 465 | + | 0 | 0 | 465 | + | 0 | 0 | 465 | + | ||||||||||||
| F14 | 0 | 465 | 0 | − | 0 | 465 | 0 | − | 0 | 465 | 0 | − | 0 | 0 | 465 | + | ||||||||||||
| F15 | 5.75 × 10−6 | 12 | 453 | + | 0 | 0 | 465 | + | 0 | 0 | 465 | + | 0 | 0 | 465 | + | ||||||||||||
| +/=/− | 8/2/5 | 10/2/3 | 10/2/3 | 10/3/2 | ||||||||||||||||||||||||
| Function | PP-ABC vs. DGABC | PP-ABC vs. APABC | PP-ABC vs. ABC | ||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| p-Value | T+ | T− | Winner | p-Value | T+ | T− | Winner | p-Value | T+ | T− | Winner | ||||||||||||||||
| F1 | 0 | 0 | 465 | + | 1 | 0 | 0 | = | 1 | 0 | 0 | = | |||||||||||||||
| F2 | 1.65 × 10-1 | 300 | 165 | − | 0 | 0 | 465 | + | 0 | 0 | 465 | + | |||||||||||||||
| F3 | 0 | 0 | 465 | + | 0 | 0 | 465 | + | 0 | 0 | 465 | + | |||||||||||||||
| F4 | 1.48 × 10-4 | 48 | 417 | + | 0 | 0 | 465 | + | 0 | 0 | 465 | + | |||||||||||||||
| F5 | 0 | 0 | 465 | + | 0 | 465 | 0 | − | 0 | 0 | 465 | + | |||||||||||||||
| F6 | 0 | 0 | 465 | + | 0 | 0 | 465 | + | 1 | 0 | 0 | = | |||||||||||||||
| F7 | 0 | 0 | 465 | + | 0 | 0 | 465 | + | 0 | 465 | 0 | − | |||||||||||||||
| F8 | 0 | 0 | 465 | + | 0 | 0 | 465 | + | 0 | 0 | 465 | + | |||||||||||||||
| F9 | 0 | 0 | 465 | + | 1 | 0 | 0 | = | 1 | 0 | 0 | = | |||||||||||||||
| F10 | 0 | 0 | 465 | + | 0 | 0 | 465 | + | 0 | 0 | 465 | + | |||||||||||||||
| F11 | 0 | 0 | 465 | + | 0 | 0 | 465 | + | 0 | 0 | 465 | + | |||||||||||||||
| F12 | 0 | 0 | 465 | + | 0 | 0 | 465 | + | 0 | 0 | 465 | + | |||||||||||||||
| F13 | 6.44 × 10−1 | 255 | 210 | − | 0 | 465 | 0 | − | 0 | 465 | 0 | − | |||||||||||||||
| F14 | 0 | 0 | 465 | + | 0 | 0 | 465 | + | 1 | 0 | 0 | = | |||||||||||||||
| F15 | 9.84 × 10−2 | 107 | 358 | + | 6.98 × 10−6 | 451 | 14 | − | 1.04 × 10−2 | 357 | 108 | − | |||||||||||||||
| +/=/− | 13/0/2 | 10/2/3 | 9/3/3 | ||||||||||||||||||||||||
| Function | PP-ABC vs. ACoM-ABC | PP-ABC vs. SABC-SG | PP-ABC vs. KFABC | PP-ABC vs. MPABC | |||||||||||||||||||||||
| p-Value | T+ | T− | Winner | p-Value | T+ | T− | Winner | p-Value | T+ | T− | Winner | p-Value | T+ | T− | Winner | ||||||||||||
| F1 | 1 | 0 | 0 | = | 1 | 0 | 0 | = | 0 | 0 | 465 | + | 1 | 0 | 0 | = | |||||||||||
| F2 | 2.83 × 10−4 | 56 | 409 | + | 0 | 0 | 465 | + | 0 | 0 | 465 | + | 0 | 0 | 465 | + | |||||||||||
| F3 | 0 | 465 | 0 | − | 0 | 0 | 465 | + | 0 | 0 | 465 | + | 0 | 465 | 0 | − | |||||||||||
| F4 | 1.71 × 10−1 | 166 | 299 | + | 2.18 × 10−2 | 344 | 121 | − | 4.07 × 10−2 | 133 | 322 | + | 5.44 × 10−1 | 203 | 262 | + | |||||||||||
| F5 | 0 | 0 | 465 | + | 0 | 0 | 465 | + | 0 | 0 | 465 | + | 0 | 0 | 465 | + | |||||||||||
| F6 | 0 | 465 | 0 | - | 0 | 0 | 465 | + | 0 | 0 | 465 | + | 0 | 465 | 0 | − | |||||||||||
| F7 | 1 | 0 | 0 | = | 0 | 0 | 465 | + | 1 | 0 | 0 | = | 1 | 0 | 0 | = | |||||||||||
| F8 | 1 | 0 | 0 | = | 0 | 0 | 465 | + | 0 | 0 | 465 | + | 1 | 0 | 0 | = | |||||||||||
| F9 | 1 | 0 | 0 | = | 0 | 0 | 465 | + | 0 | 0 | 465 | + | 1 | 0 | 0 | = | |||||||||||
| F10 | 1.92 × 10−6 | 1 | 464 | + | 2.22 × 10−4 | 53 | 412 | + | 0 | 465 | 0 | − | 3.61 × 10−1 | 151 | 314 | + | |||||||||||
| F11 | 1 | 0 | 0 | = | 1 | 0 | 0 | = | 1 | 0 | 0 | = | 1 | 0 | 0 | = | |||||||||||
| F12 | 0 | 0 | 465 | + | 0 | 0 | 465 | + | 0 | 0 | 465 | + | 0 | 0 | 465 | + | |||||||||||
| F13 | 0 | 0 | 465 | + | 0 | 0 | 465 | + | 0 | 0 | 465 | + | 0 | 0 | 465 | + | |||||||||||
| F14 | 1 | 0 | 0 | = | 0 | 0 | 465 | + | 0 | 0 | 465 | + | 1 | 0 | 0 | = | |||||||||||
| F15 | 1.24 × 10−5 | 345 | 120 | − | 0 | 0 | 465 | + | 0 | 0 | 465 | + | 2.85 × 10−2 | 339 | 126 | − | |||||||||||
| +/=/− | 6/6/3 | 12/2/1 | 12/2/1 | 6/6/3 | |||||||||||||||||||||||
| Function Category | PP-ABC vs. DGABC | PP-ABC vs. APABC | PP-ABC vs. ABC | PP-ABC vs. ACoM-ABC | PP-ABC vs. SABC-SG | PP-ABC vs. KFABC | PP-ABC vs. MPABC |
|---|---|---|---|---|---|---|---|
| UM (F1–F4) | 3/0/1 | 3/1/0 | 3/1/0 | 1/1/2 | 0/2/2 | 1/1/2 | 0/2/2 |
| MM (F5–F11) | 7/0/0 | 5/1/1 | 5/1/1 | 4/1/2 | 7/0/0 | 6/1/0 | 6/1/0 |
| PF (F12, F13) | 1/0/1 | 1/0/1 | 1/0/1 | 2/0/0 | 2/0/0 | 2/0/0 | 2/0/0 |
| CF (F14, F15) | 2/0/0 | 1/0/1 | 0/1/1 | 1/0/1 | 1/0/1 | 1/0/1 | 2/0/0 |
| Function Category | PP-ABC vs. DGABC | PP-ABC vs. APABC | PP-ABC vs. ABC | PP-ABC vs. ACoM-ABC | PP-ABC vs. SABC-SG | PP-ABC vs. KFABC | PP-ABC vs. MPABC |
|---|---|---|---|---|---|---|---|
| UM (F1–F4) | 3/0/1 | 3/1/0 | 3/1/0 | 2/1/1 | 2/1/1 | 4/0/0 | 2/1/1 |
| MM (F5–F11) | 6/0/1 | 5/2/0 | 5/2/0 | 2/4/1 | 6/1/0 | 4/2/1 | 2/4/1 |
| PF (F12, F13) | 2/0/0 | 1/0/1 | 1/0/1 | 2/0/0 | 2/0/0 | 2/0/0 | 2/0/0 |
| CF (F14, F15) | 1/0/1 | 2/0/0 | 2/0/0 | 0/1/1 | 2/0/0 | 2/0/0 | 0/1/1 |
| Algorithm | Objective Function Value | ||
|---|---|---|---|
| PP-ABC | 0.7886 | 0.4082 | 263.895 |
| WOAmM | 0.7894 | 0.4061 | 263.895 |
| AAA | 0.7887 | 0.4081 | 263.895 |
| TSA | 0.788 | 0.408 | 263.68 (infeasible) |
| CS | 0.7887 | 0.4090 | 263.895 |
| BAT | 0.7886 | 0.4084 | 263.895 |
| MBA | 0.7886 | 0.4086 | 263.895 |
| MVO | 0.7886 | 0.4084 | 263.895 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Thirugnanasambandam, K.; Ramalingam, R.; Mohan, D.; Rashid, M.; Juneja, K.; Alshamrani, S.S. Patron–Prophet Artificial Bee Colony Approach for Solving Numerical Continuous Optimization Problems. Axioms 2022, 11, 523. https://doi.org/10.3390/axioms11100523
Thirugnanasambandam K, Ramalingam R, Mohan D, Rashid M, Juneja K, Alshamrani SS. Patron–Prophet Artificial Bee Colony Approach for Solving Numerical Continuous Optimization Problems. Axioms. 2022; 11(10):523. https://doi.org/10.3390/axioms11100523
Chicago/Turabian StyleThirugnanasambandam, Kalaipriyan, Rajakumar Ramalingam, Divya Mohan, Mamoon Rashid, Kapil Juneja, and Sultan S. Alshamrani. 2022. "Patron–Prophet Artificial Bee Colony Approach for Solving Numerical Continuous Optimization Problems" Axioms 11, no. 10: 523. https://doi.org/10.3390/axioms11100523
APA StyleThirugnanasambandam, K., Ramalingam, R., Mohan, D., Rashid, M., Juneja, K., & Alshamrani, S. S. (2022). Patron–Prophet Artificial Bee Colony Approach for Solving Numerical Continuous Optimization Problems. Axioms, 11(10), 523. https://doi.org/10.3390/axioms11100523