
Simulation of Marine Debris Path Using Mathematical Model in the Gulf of Thailand



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Mathematical Method
2.1. The Oceanic Model
2.2. Solving Method
2.2.1. The Finite Difference Method (FDM)
2.2.2. The Splitting Method
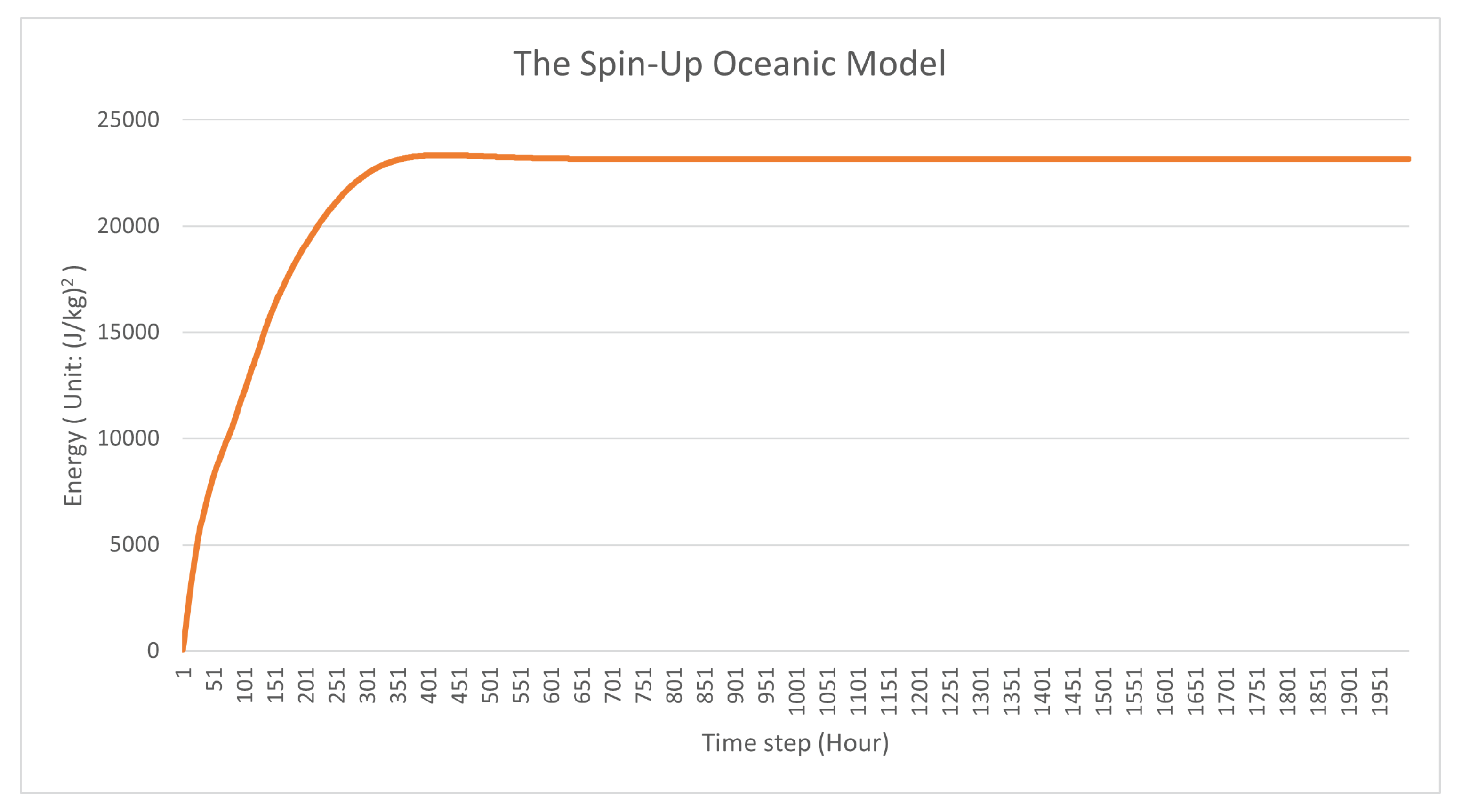
2.2.3. Spin-Up Method
2.2.4. Root Mean Square Error
2.3. Lagrangian Particle Tracking Model
2.4. Operational Diagram
3. Results
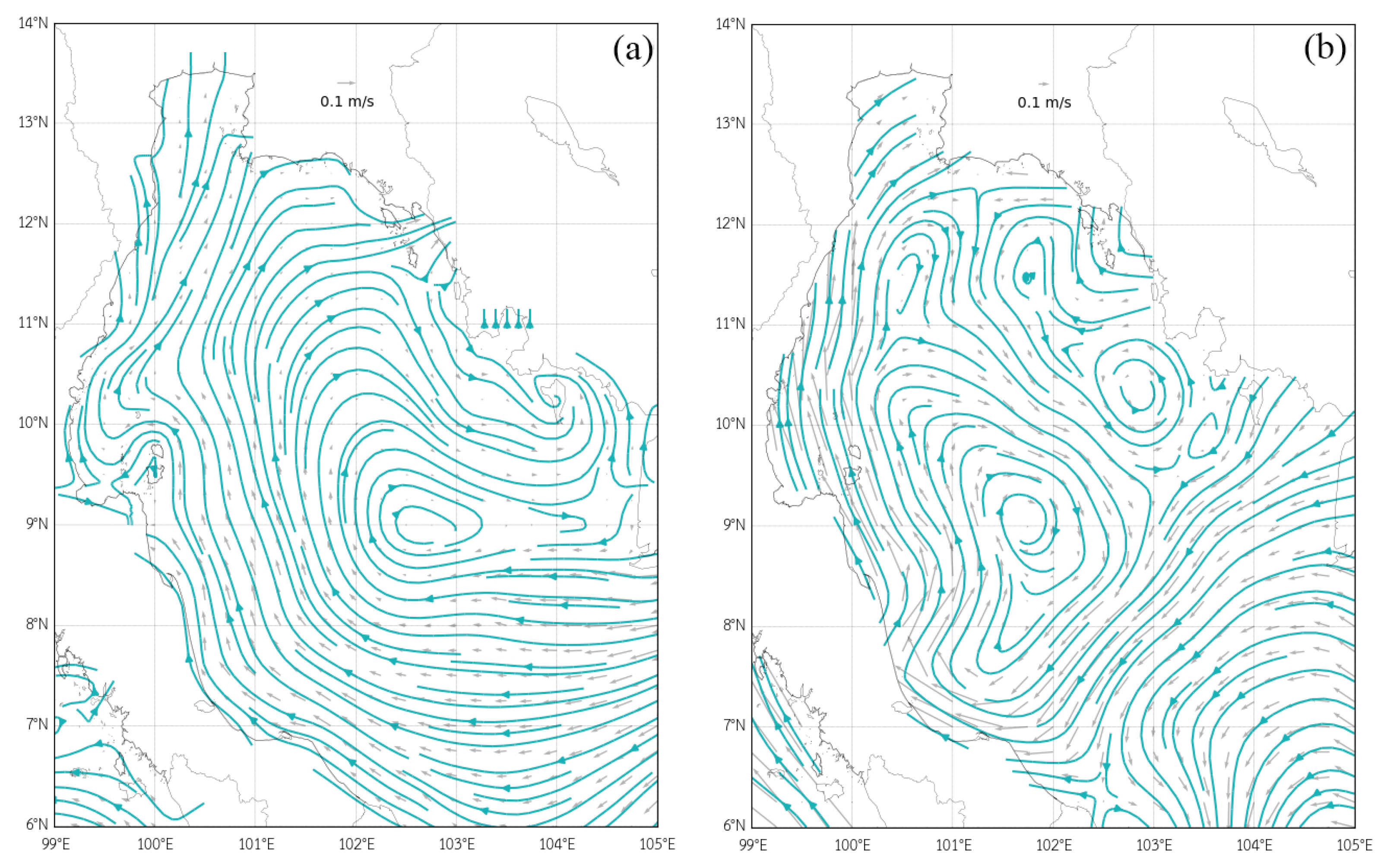
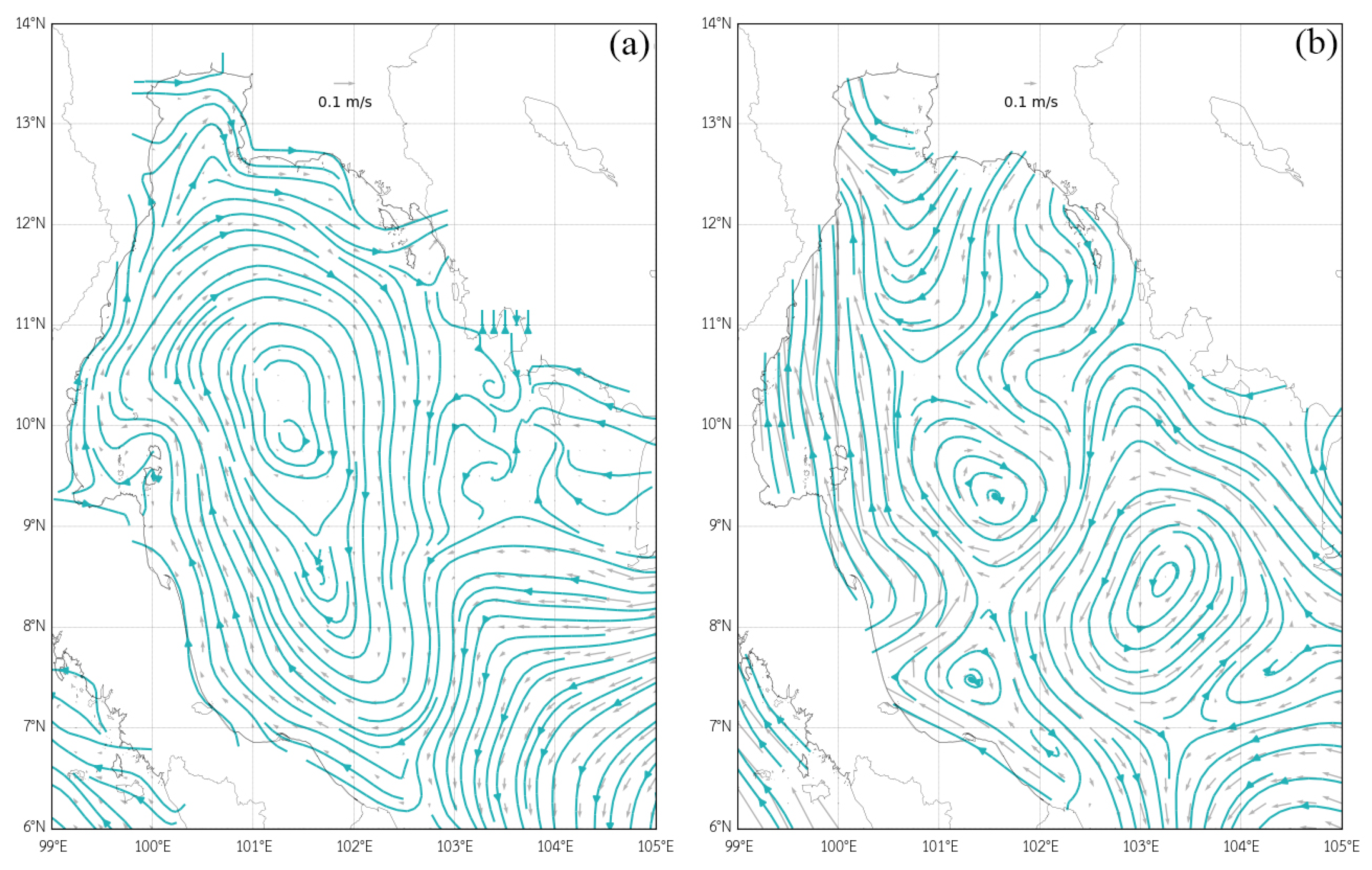
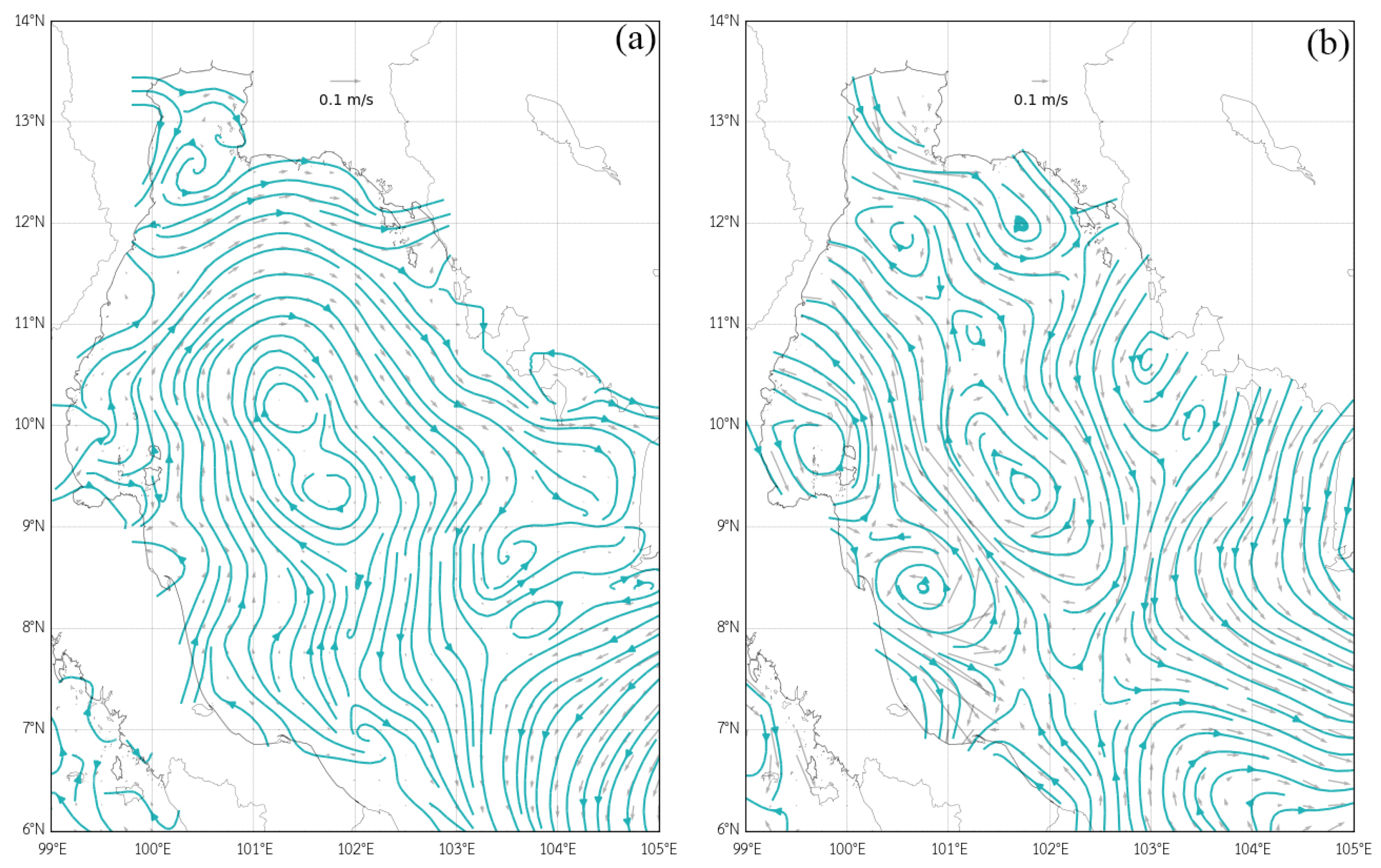
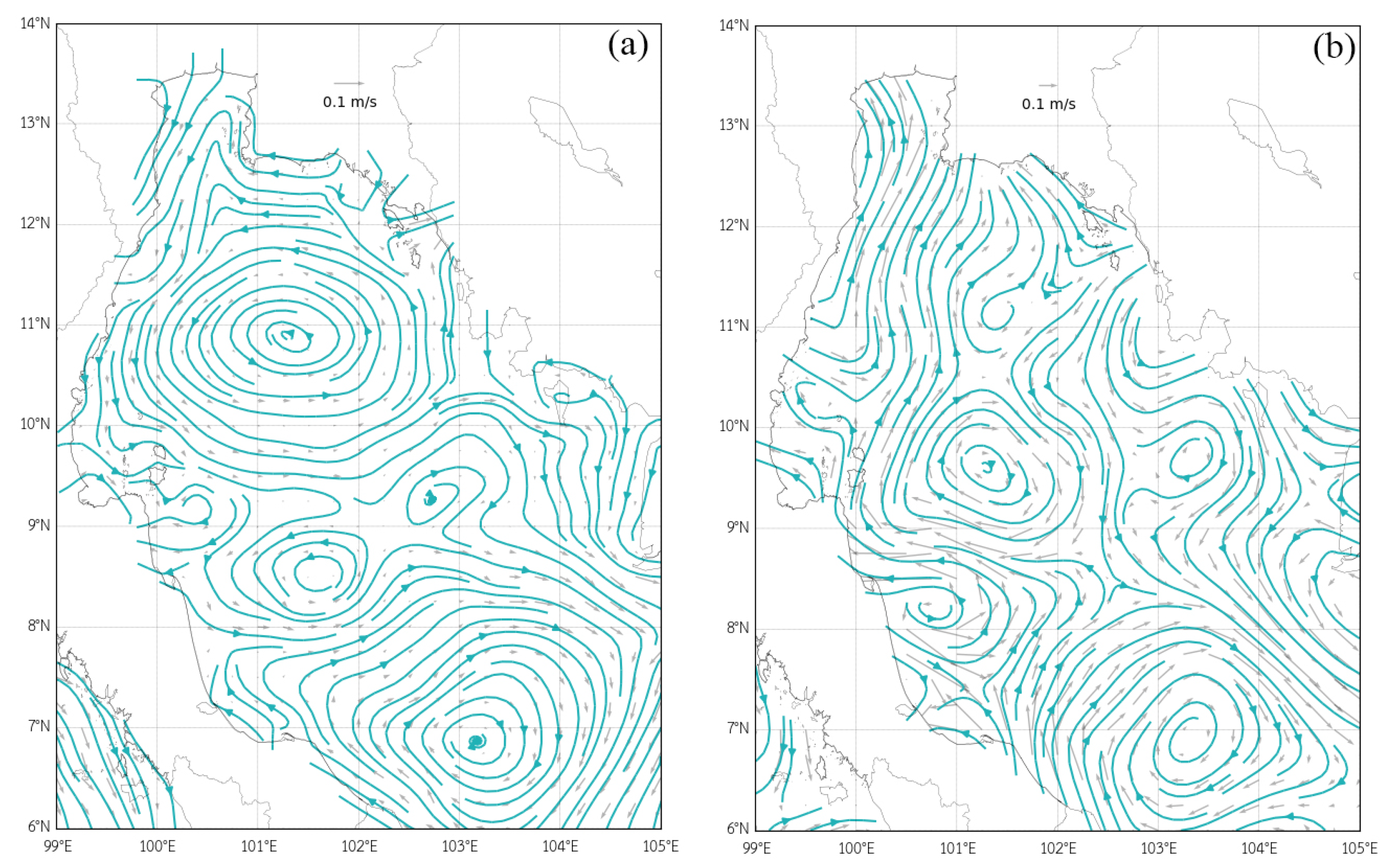
3.1. Oceanic Model
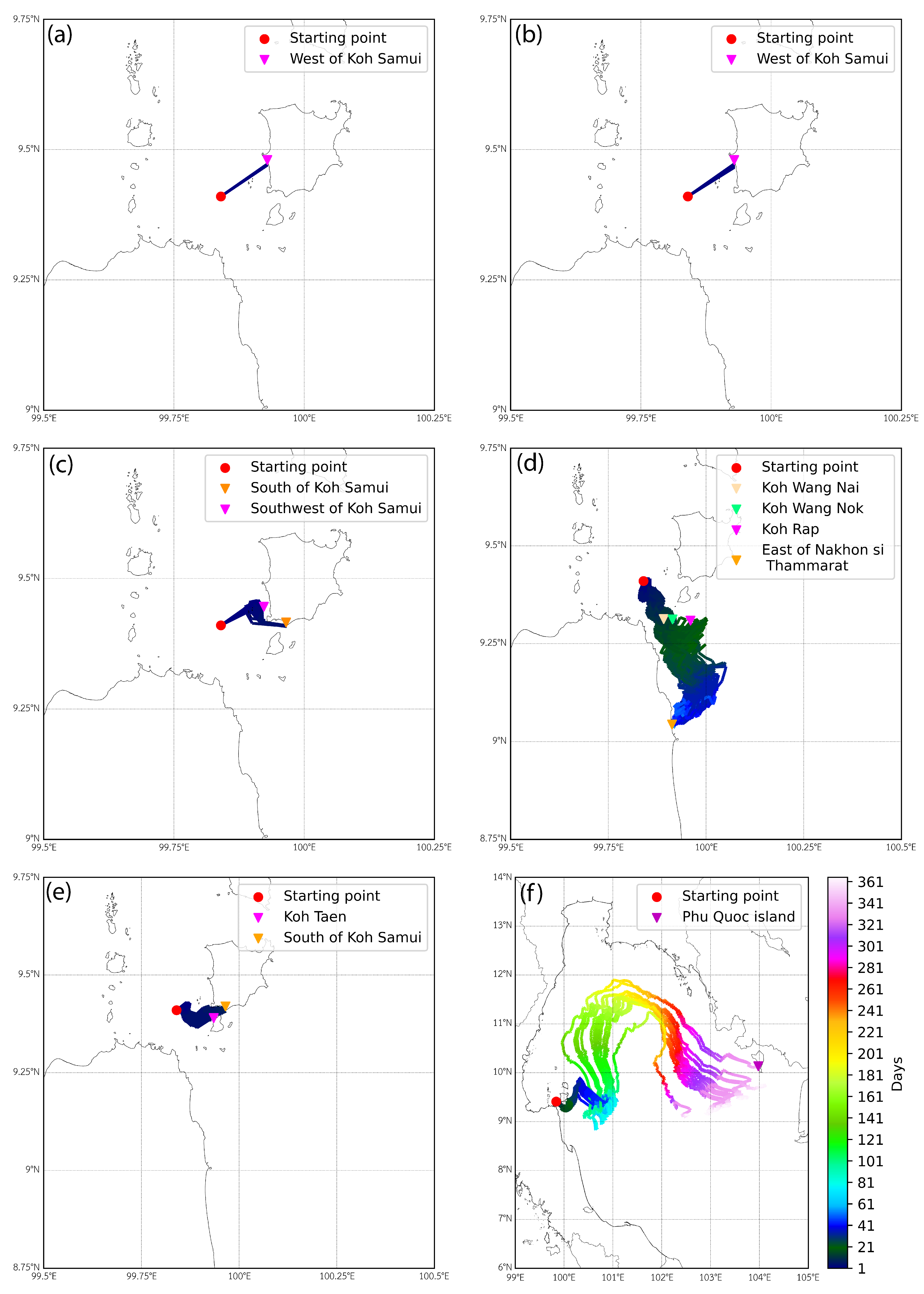
3.2. Marine Debris’s Path
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chanthamat, Y.; Israngkun Na Ayutthaya, A. Marine Garbage, the National Plan Must Not Neglect the Community. 2021. Available online: https://tdri.or.th/2021/06/worldoceanday/ (accessed on 7 April 2021).
- Abolfathi, S.; Cook, S.; Yeganeh-Bakhtiary, A.; Borzooei, S.; Pearson, J. Microplastics Transport and Mixing Mechanisms in The Nearshore Region. Coast. Eng. Proc. 2020, 36, 63. [Google Scholar] [CrossRef]
- Abolfathi, S.; Pearson, J. Solute Dispersion in The Nearshore due to Oblique Waves. Coast. Eng. Proc. 2014, 1, 49. [Google Scholar] [CrossRef] [Green Version]
- Abolfathi, S.; Pearson, J. Application of Smoothed Particle Hydrodynamic (SPH) in Nearshore Mixing: A Comparison to Laboratory Data. Coast. Eng. Proc. 2017, 35, 16. [Google Scholar] [CrossRef]
- Ren, Z.Y.; Zhao, X.; Wang, B.L.; Dias, F.; Liu, H. Characteristics of wave amplitude and currents in South China Sea induced by a virtual extreme tsunami. J. Hydrodyn. 2017, 29, 377–392. [Google Scholar] [CrossRef]
- Ren, Z.; Liu, H.; Jimenez, C.; Wang, Y. Tsunami resonance and standing waves in the South China Sea. Ocean. Eng. 2022, 262, 112323. [Google Scholar] [CrossRef]
- Guo, D.; Zeng, Q.; Ji, Z. A Numerical model of Storm Surges and Its Open Boundary Problems. Chin. J. Atmos. Sci. 1992, 16, 193–204. [Google Scholar]
- Collins, S.; James, R.; Ray, P.; Chen, K.; Lassman, A.; Brownlee, J. Grids in Numerical Weather and Climate Models. Clim. Chang. Reg. Responses 2013, 256, 111–128. [Google Scholar]
- Aschariyaphotha, N.; Wongwises, P.; Wongwises, S.; Humphries, U.W.; You, X. Simulation of seasonal circulations and thermohaline variabilities in the Gulf of Thailand. Adv. Atmos. Sci. 2008, 25, 489–506. [Google Scholar] [CrossRef]
- Carlson, D.F.; Suaria, G.; Aliani, S.; Fredj, E.; Fortibuoni, T.; Griffa, A.; Russo, A.; Melli, V. Combining Litter Observations with a Regional Ocean Model to Identify Sources and Sinks of Floating Debris in a Semi-enclosed Basin: The Adriatic Sea. Front. Mar. Sci. 2017, 4, 78. [Google Scholar] [CrossRef] [Green Version]
- Seo, S.; Park, Y.G.; Kim, K. Destination of floating plastic debris released from ten major rivers around the Korean Peninsula. Environ. Int. 2020, 138, 105665. [Google Scholar] [CrossRef] [PubMed]
- Seo, S.; Park, Y.G.; Kim, K. Tracking flood debris using satellite-derived ocean color and particle-tracking modeling. Mar. Pollut. Bull. 2020, 161, 111828. [Google Scholar] [CrossRef] [PubMed]
- Yoon, J.-H.; Kawano, S.; Igawa, S. Modeling of marine litter drift and beaching in the Japan Sea. Mar. Pollut. Bull. 2010, 60, 448–463. [Google Scholar] [CrossRef] [PubMed]
- Aongponyoskun, M. The Diffusion Coefficient of Seawater in Ao Si Racha. Kasetsart J. Nat. Sci. 2008, 42, 49–53. [Google Scholar]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Phiphit, J.; Wangwongchai, A.; Humphries, U.W. Simulation of Marine Debris Path Using Mathematical Model in the Gulf of Thailand. Axioms 2022, 11, 571. https://doi.org/10.3390/axioms11100571
Phiphit J, Wangwongchai A, Humphries UW. Simulation of Marine Debris Path Using Mathematical Model in the Gulf of Thailand. Axioms. 2022; 11(10):571. https://doi.org/10.3390/axioms11100571
Chicago/Turabian StylePhiphit, Jettapol, Angkool Wangwongchai, and Usa Wannasingha Humphries. 2022. "Simulation of Marine Debris Path Using Mathematical Model in the Gulf of Thailand" Axioms 11, no. 10: 571. https://doi.org/10.3390/axioms11100571
APA StylePhiphit, J., Wangwongchai, A., & Humphries, U. W. (2022). Simulation of Marine Debris Path Using Mathematical Model in the Gulf of Thailand. Axioms, 11(10), 571. https://doi.org/10.3390/axioms11100571