
Application of the Euler–Lagrange Approach and Immersed Boundary Method to Investigate the Behavior of Rigid Particles in a Confined Flow

 ,
,  and
and
Abstract
:1. Introduction
2. Mathematical Model and Numerical Methods
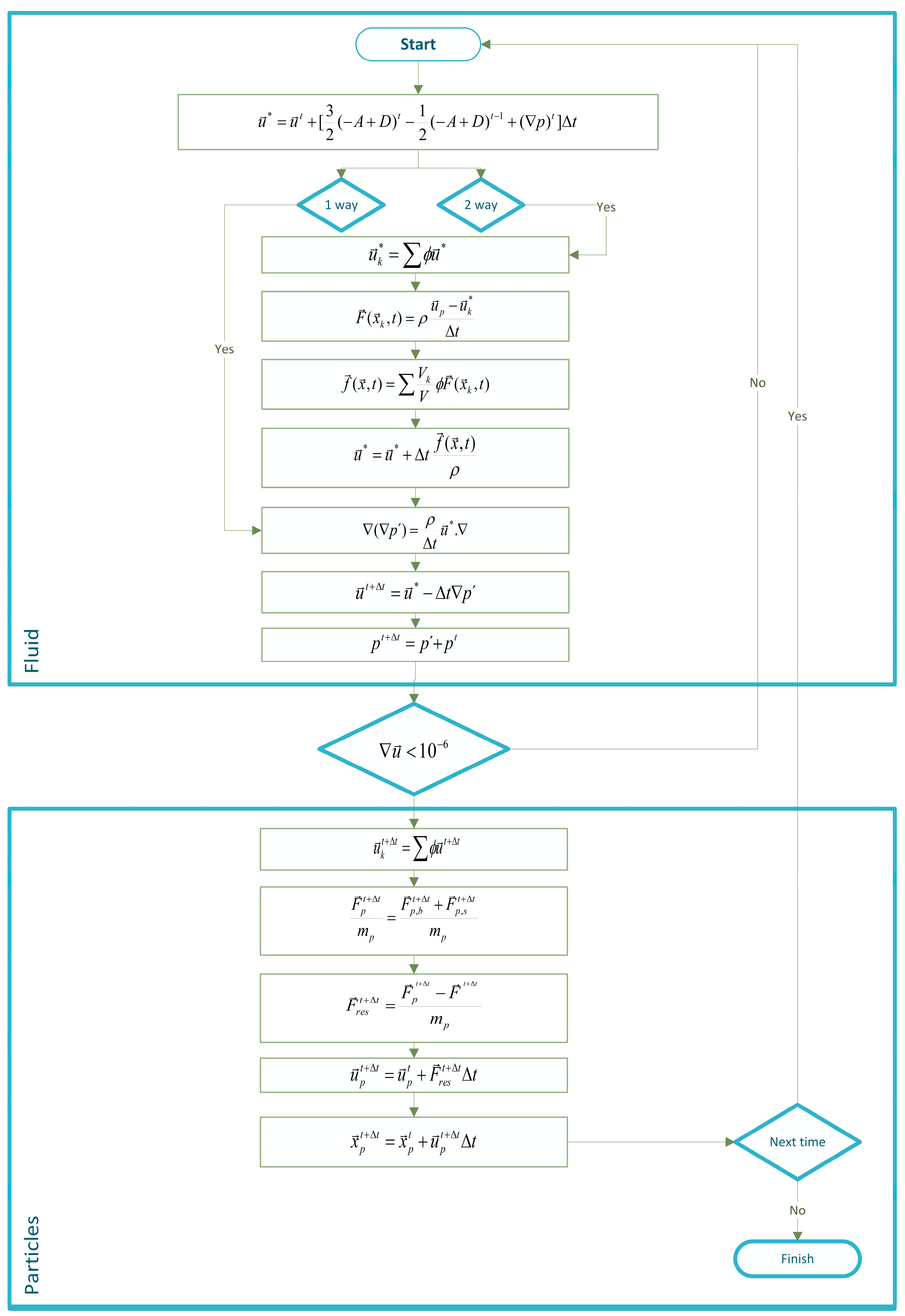
2.1. Fluid Flow Motion Model
2.2. Particles’ Motion Model
2.3. Particle–Wall Interactions
3. Flow Configuration and Parameters
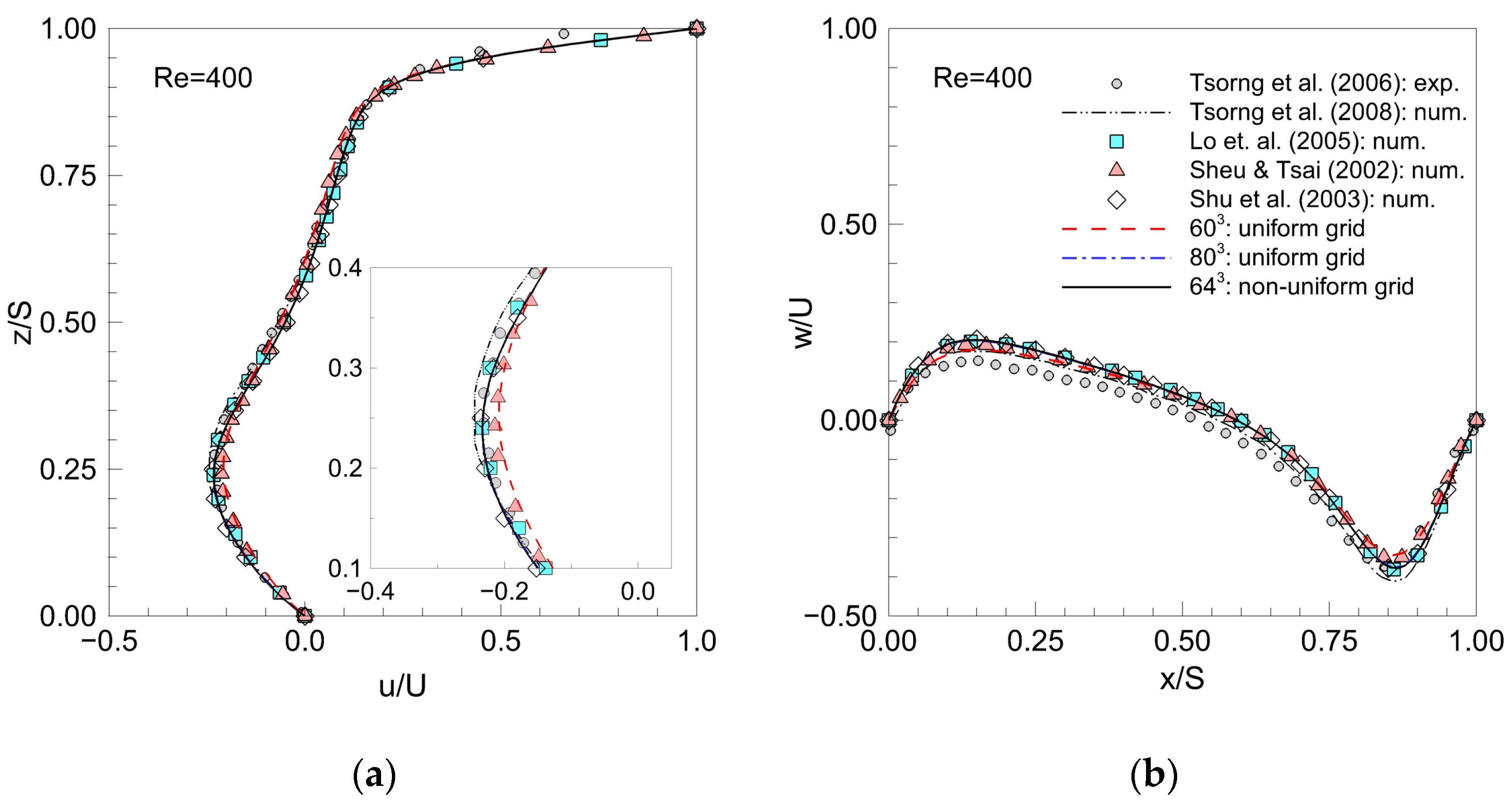
3.1. Validation Process: Lid-Driven Cavity Flow
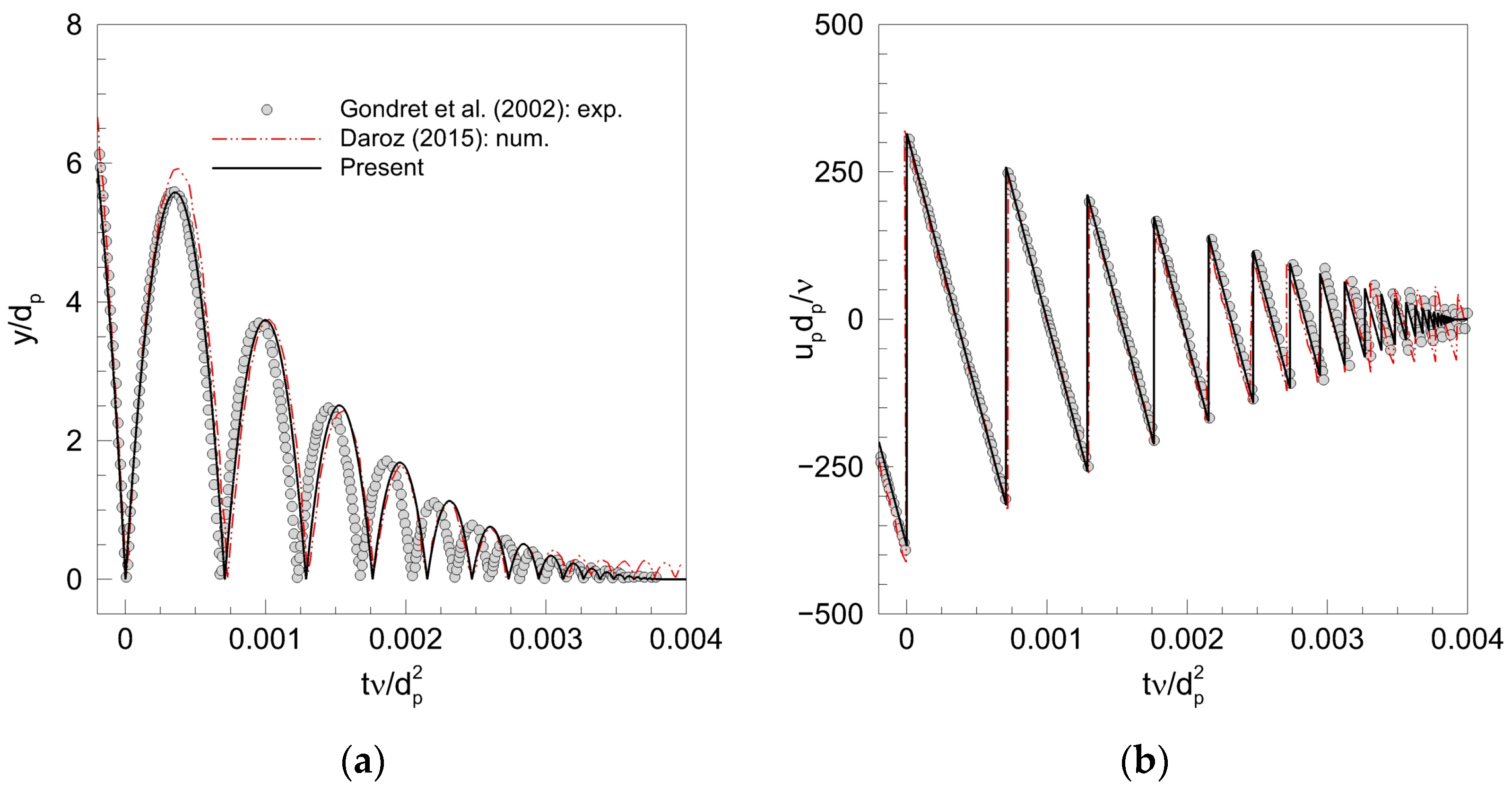
3.2. Validation Process: Bouncing Motion of a Particle–Wall Collision in Fluid
4. Results and Discussion
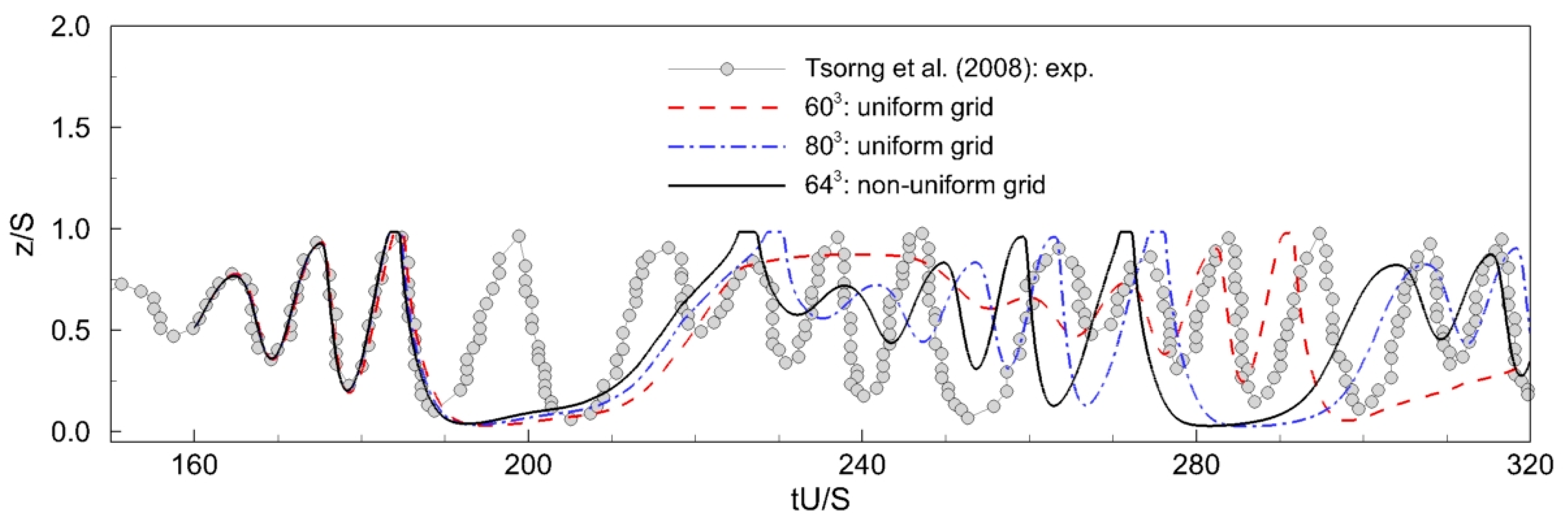
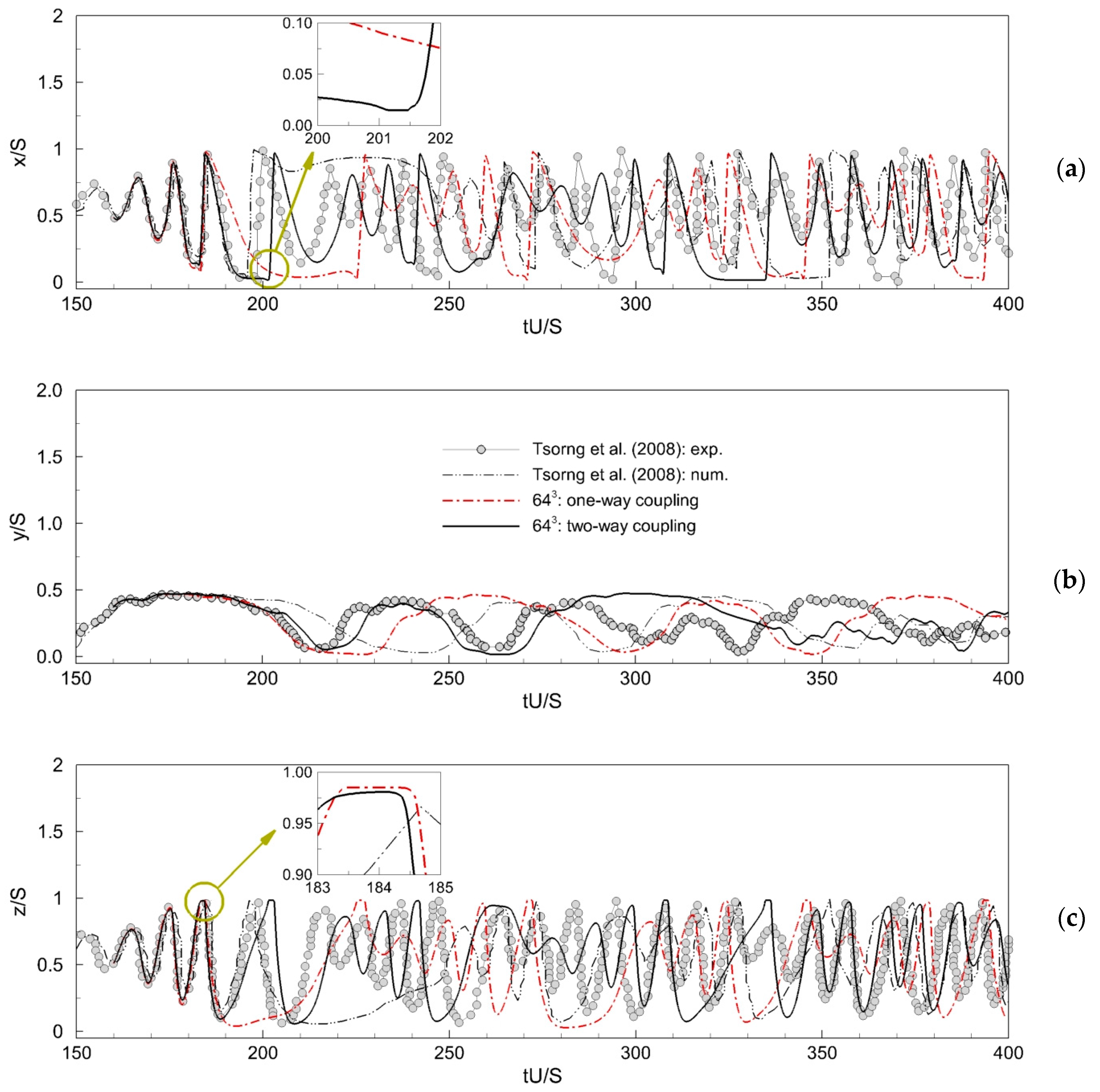
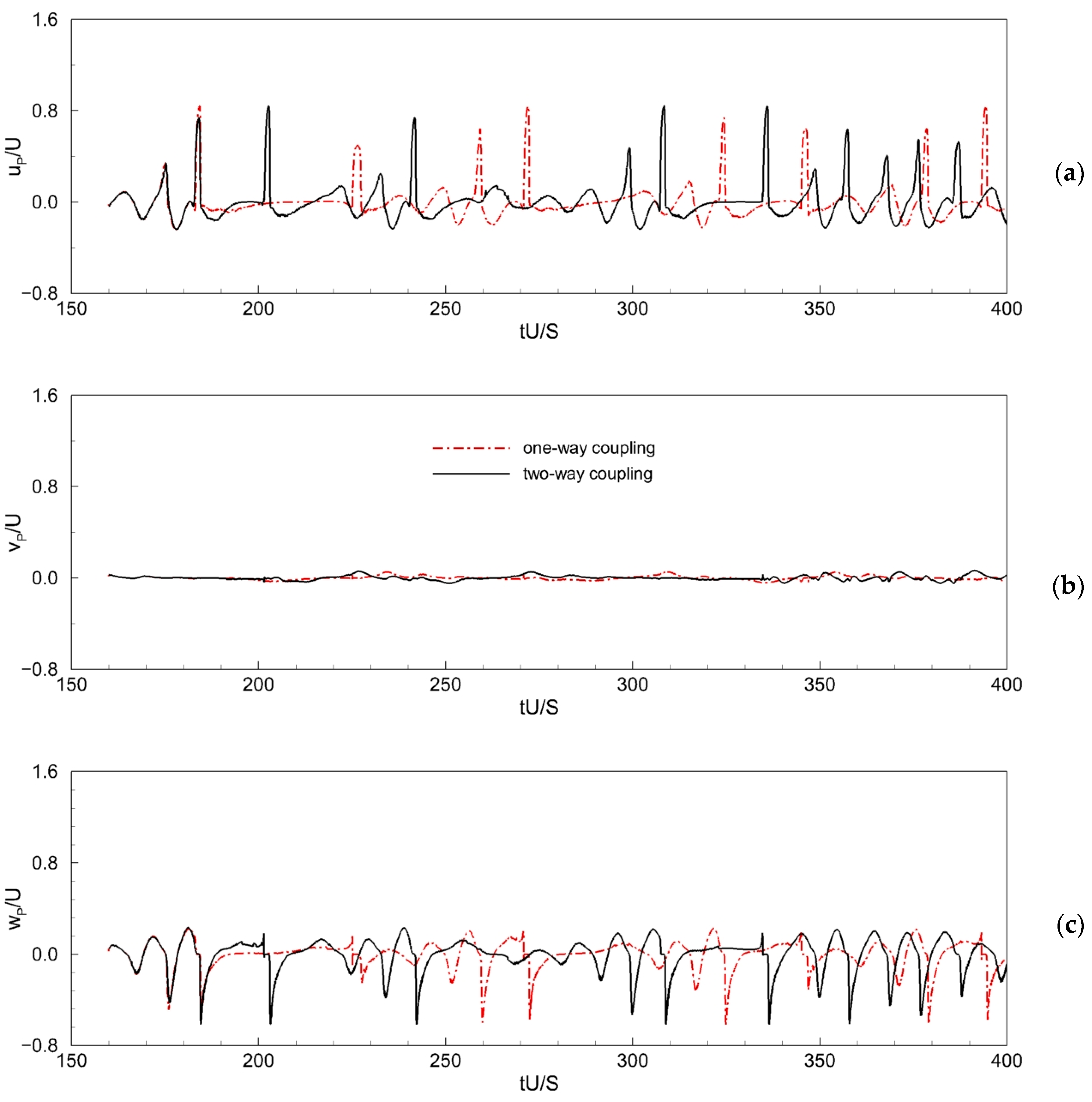
4.1. Three-Dimensional Position Histories and Trajectories of the Particle
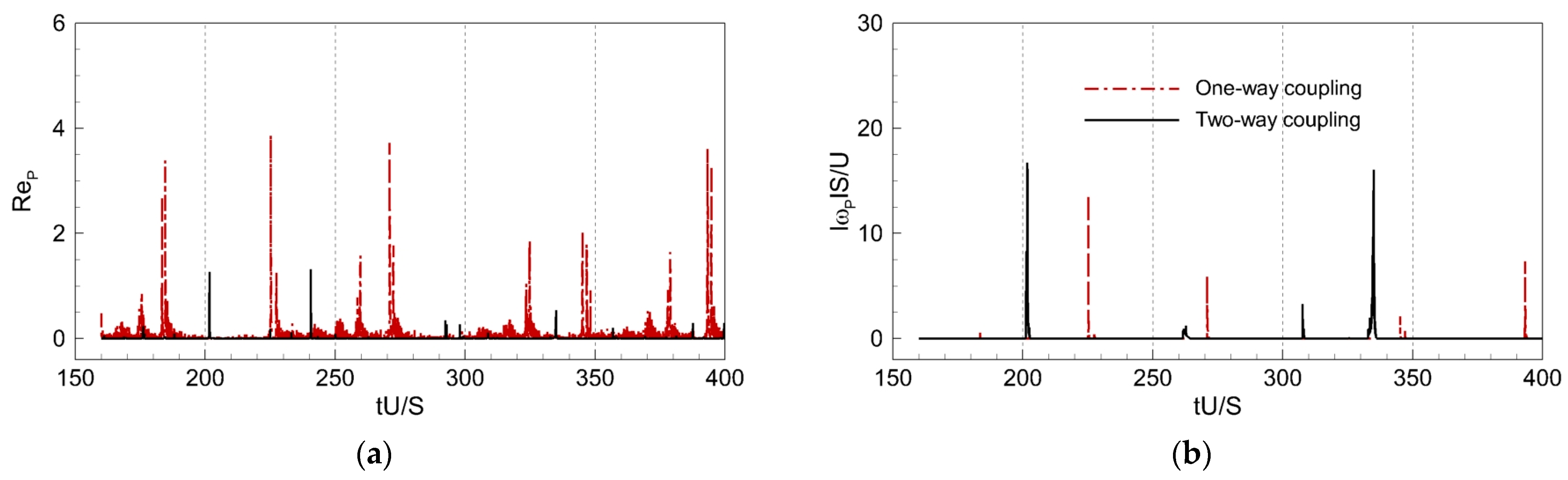
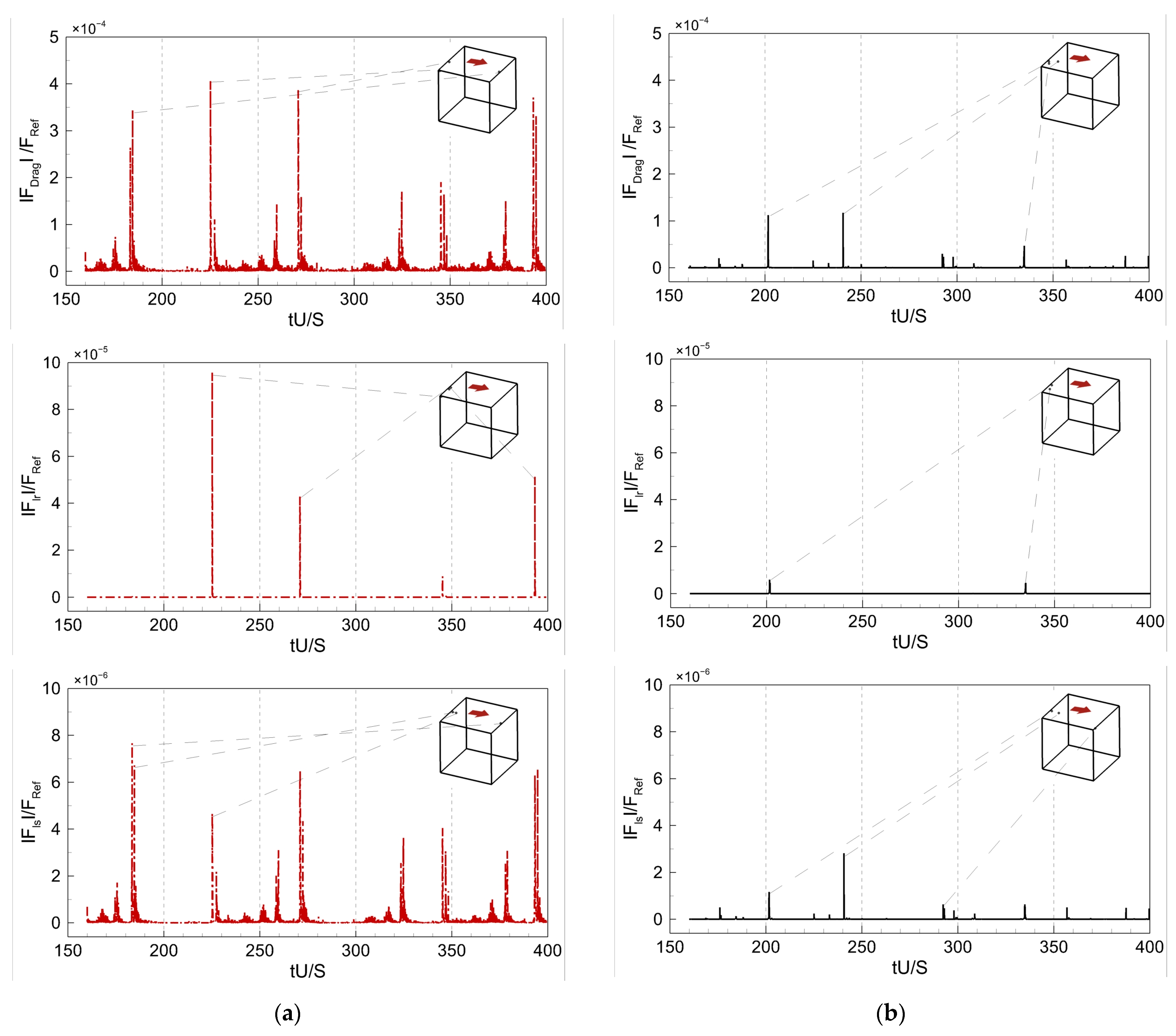
4.2. Forces Acting on the Particle
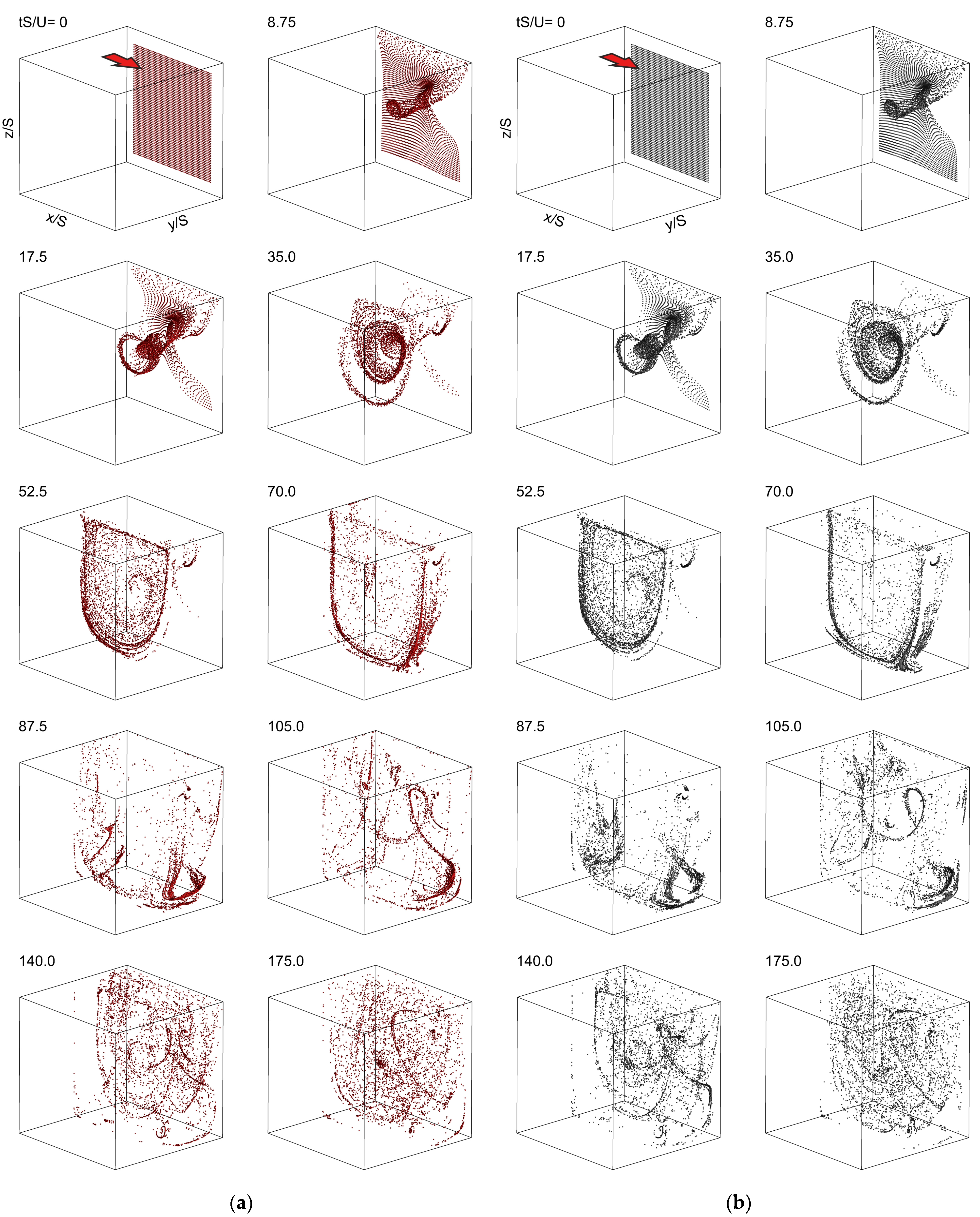
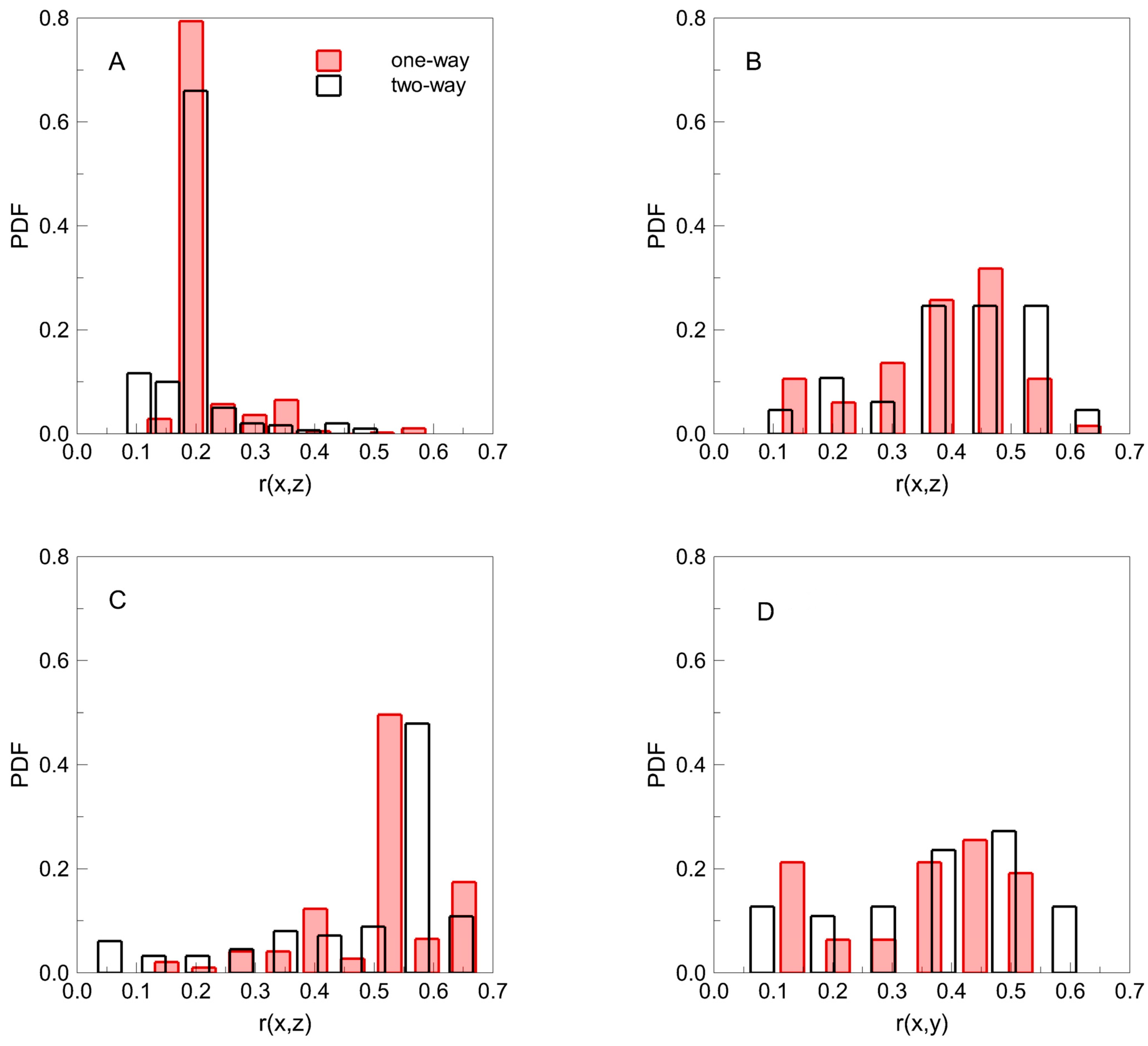
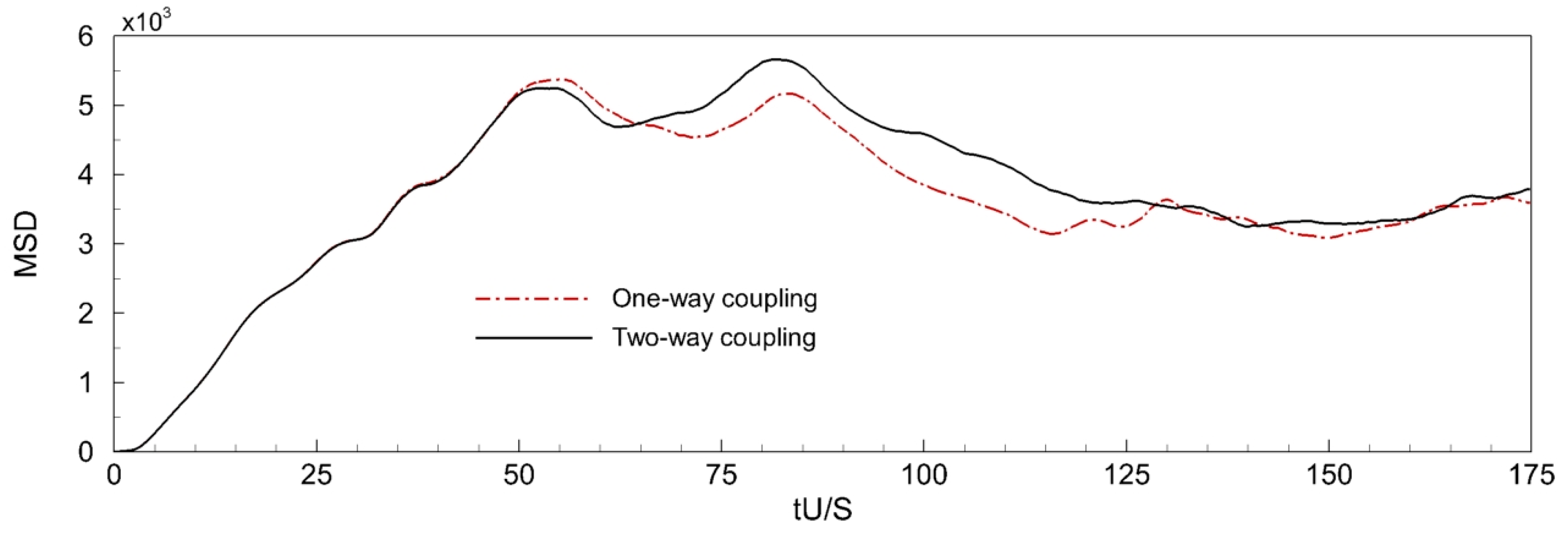
4.3. Simulation of Proposed Problem with 4225 Particles
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Greek Letters | Magnus force, N.kg−1 | ||
| Time step, s | Sum of all force acting on the particle, N | ||
| Reynolds ratio | Particle body forces, N | ||
| Dynamic viscosity, Pa.s | Particle surface forces, N | ||
| Dynamic friction coefficient | Resultant force, N | ||
| Static friction coefficient | Eulerian force, N.m−3 | ||
| Kinematic viscosity, m2.s−1 | Gravitational acceleration, m.s2 | ||
| Poisson’s ratio | Expansion/reduction factor | ||
| Specific mass, kg2.m3 | Particle moment of inertia, kg.m2 | ||
| Particle volume fraction | Distance between particle center, m | ||
| Particle angular velocity, rad.s−1 | Particle mass, kg | ||
| Vorticity, s−1 | Volume’s number | ||
| Relative rotation, rad.s−1 | Normal vector, m | ||
| Pressure, Pa | |||
| Roman Letters | Reynolds number | ||
| Advective term | Reynolds number of particle | ||
| Drag coefficient | Reynolds number of particle rotation | ||
| Rotation lift coefficient | Reynolds number of shear flow | ||
| Shear lift coefficient | Cavity side, m | ||
| Particle diameter, m | Stokes number | ||
| Diffusive term | Torque, N.m | ||
| Wall normal restitution coefficient | Time, s | ||
| Tangential restitution coefficient | Fluid velocity, m.s−1 | ||
| Young elastic modulus, Pa | Particle velocity, m.s−1 | ||
| Lagrangian force, N.m−3 | Relative velocity at contact point, m.s−1 | ||
| Saffman force, N.kg−1 | Cartesian coordinates | ||
References
- Augusto, L.L.X.; Lopes, G.C.; Gonçalves, J.A.S. A CFD Study of Deposition of Pharmaceutical Aerosols under Different Respiratory Conditions. Braz. J. Chem. Eng. 2016, 33, 549–558. [Google Scholar] [CrossRef]
- De Souza, F.J.; Salvo, R.D.V.; Martins, D.D.M. Simulation of the Performance of Small Cyclone Separators through the Use of Post Cyclones (PoC) and Annular Overflow Ducts. Sep. Purif. Technol. 2015, 142, 71–82. [Google Scholar] [CrossRef]
- dos Santos, V.F.; de Souza, F.J.; Duarte, C.A.R. Reducing Bend Erosion with a Twisted Tape Insert. Powder Technol. 2016, 301, 889–910. [Google Scholar] [CrossRef]
- Moslemi, A.; Ahmadi, G. Study of the Hydraulic Performance of Drill Bits Using a Computational Particle-Tracking Method. SPE Drill. Complet. 2014, 29, 28–35. [Google Scholar] [CrossRef]
- Jadhav, A.J.; Barigou, M. Eulerian-Lagrangian Modelling of Turbulent Two-Phase Particle-Liquid Flow in a Stirred Vessel: CFD and Experiments Compared. Int. J. Multiph. Flow 2022, 155, 104191. [Google Scholar] [CrossRef]
- Tsorng, S.J.; Capart, H.; Lo, D.C.; Lai, J.S.; Young, D.L. Behaviour of Macroscopic Rigid Spheres in Lid-Driven Cavity Flow. Int. J. Multiph. Flow 2008, 34, 76–101. [Google Scholar] [CrossRef]
- Elghobashi, S. On Predicting Particle-Laden Turbulent Flows. Appl. Sci. Res. 1994, 52, 309–329. [Google Scholar] [CrossRef]
- Greifzu, F.; Kratzsch, C.; Forgber, T.; Lindner, F.; Schwarze, R. Assessment of Particle-Tracking Models for Dispersed Particle-Laden Flows Implemented in OpenFOAM and ANSYS FLUENT. Eng. Appl. Comput. Fluid Mech. 2016, 10, 30–43. [Google Scholar] [CrossRef]
- Peskin, C.S. Flow Patterns around Heart Valves: A Numerical Method. J. Comput. Phys. 1972, 10, 252–271. [Google Scholar] [CrossRef]
- Lima, E.; Silva, A.L.F.; Silveira-Neto, A.; Damasceno, J.J.R. Numerical Simulation of Two-Dimensional Flows over a Circular Cylinder Using the Immersed Boundary Method. JCoPh 2003, 189, 351–370. [Google Scholar] [CrossRef]
- Uhlmann, M. An Immersed Boundary Method with Direct Forcing for the Simulation of Particulate Flows. J. Comput. Phys. 2005, 209, 448–476. [Google Scholar] [CrossRef]
- Wang, Z.; Fan, J.; Luo, K. Combined Multi-Direct Forcing and Immersed Boundary Method for Simulating Flows with Moving Particles. Int. J. Multiph. Flow 2009, 34, 283–302. [Google Scholar] [CrossRef]
- Borges, J.E.; Lourenço, M.; Padilla, E.L.M.; Micallef, C. Immersed Boundary Method Application as a Way to Deal with the Three-Dimensional Sudden Contraction. Computation 2018, 6, 50. [Google Scholar] [CrossRef]
- Borges, J.E.; Padilla, E.L.M.; Lourenço, M.A.S.; Micallef, C. Large-Eddy Simulation of Downhole Flow: The Effects of Flow and Rotation Rates. Can. J. Chem. Eng. 2021, 99, S751–S770. [Google Scholar] [CrossRef]
- de Souza Lourenço, M.A.; Padilla, E.L.M. An Octree Structured Finite Volume Based Solver. Appl. Math. Comput. 2020, 365, 124721. [Google Scholar] [CrossRef]
- Nascimento, A.A.; Mariano, F.P.; Padilla, E.L.M.; Silveira-Neto, A. Comparison of the Convergence Rates between Fourier Pseudo-Spectral and Finite Volume Method Using Taylor-Green Vortex Problem. J. Braz. Soc. Mech. Sci. Eng. 2020, 42, 491. [Google Scholar] [CrossRef]
- Borges, J.E.; de Souza Lourenço, M.A.; Padilla, E.L.M.; Micallef, C. A Simplified Model for Fluid–Structure Interaction: A Cylinder Tethered by Springs in a Lid-Driven Cavity Flow. J. Braz. Soc. Mech. Sci. Eng. 2021, 43, 504. [Google Scholar] [CrossRef]
- Borges, J.E.; Padilla, E.L.M. Influence of Forced Oscillation, Orbital Motion, Axial Flow and Free Motion of the Inner Pipe on Taylor–Couette Flow. J. Braz. Soc. Mech. Sci. Eng. 2021, 43, 85. [Google Scholar] [CrossRef]
- Monteiro, L.M.; Mariano, F.P. Flow Modeling over Airfoils and Vertical Axis Wind Turbines Using Fourier Pseudo-Spectral Method and Coupled Immersed Boundary Method. Axioms 2023, 12, 212. [Google Scholar] [CrossRef]
- White, F.M. Viscous Fluid Flow, 3rd ed.; McGraw-Hill Series in Mechanical Engineering; McGraw-Hill: Boston, MA, USA, 2006; ISBN 978-0-07-240231-5. [Google Scholar]
- Patankar, S.V. Numerical Heat Transfer and Fluid Flow, 1st ed.; CRC Press: Boca Raton, FL, USA, 2018; ISBN 978-1-315-27513-0. [Google Scholar]
- Kim, J.; Moin, P. Application of a Fractional-Step Method to Incompressible Navier-Stokes Equations. J. Comput. Phys. 1985, 59, 308–323. [Google Scholar] [CrossRef]
- Vanella, M.; Balaras, E. A Moving-Least-Squares Reconstruction for Embedded-Boundary Formulations. J. Comput. Phys. 2009, 228, 6617–6628. [Google Scholar] [CrossRef]
- Bodnár, T.; Galdi, G.P.; Nečasová, Š. (Eds.) Particles in Flows, 1st ed.; Advances in Mathematical Fluid Mechanics; Birkhäuser: Cham, Switzerland, 2017; ISBN 978-3-319-60282-0. [Google Scholar]
- Morrison, F.A. An Introduction to Fluid Mechanics, 1st ed.; Cambridge University Press: Cambridge, UK, 2013; ISBN 978-1-139-04746-3. [Google Scholar]
- Sommerfeld, M. Theoretical and Experimental Modelling of Particulate Flows. Available online: https://www.yumpu.com/en/document/view/18701972/theoretical-and-experimental-modelling-of-particulate-flows (accessed on 20 November 2023).
- Saffman, P.G. The Lift on a Small Sphere in a Slow Shear Flow. J. Fluid. Mech. 1965, 22, 385–400. [Google Scholar] [CrossRef]
- Mei, R. An Approximate Expression for the Shear Lift Force on a Spherical Particle at Finite Reynolds Number. Int. J. Multiph. Flow 1992, 18, 145–147. [Google Scholar] [CrossRef]
- Crowe, C.T.; Schwarzkopf, J.D.; Sommerfeld, M.; Tsuji, Y. (Eds.) Multiphase Flows with Droplets and Particles, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2012; ISBN 978-1-4398-4050-4. [Google Scholar]
- Oesterlé, B.; Bui Dinh, T. Experiments on the Lift of a Spinning Sphere in a Range of Intermediate Reynolds Numbers. Exp. Fluids 1998, 25, 16–22. [Google Scholar] [CrossRef]
- Rubinow, S.I.; Keller, J.B. The Transverse Force on a Spinning Sphere Moving in a Viscous Fluid. J. Fluid. Mech. 1961, 11, 447–459. [Google Scholar] [CrossRef]
- Dennis, S.C.R.; Singh, S.N.; Ingham, D.B. The Steady Flow Due to a Rotating Sphere at Low and Moderate Reynolds Numbers. J. Fluid. Mech. 1980, 101, 257–279. [Google Scholar] [CrossRef]
- Breuer, M.; Alletto, M.; Langfeldt, F. Sandgrain Roughness Model for Rough Walls within Eulerian–Lagrangian Predictions of Turbulent Flows. Int. J. Multiph. Flow 2012, 43, 157–175. [Google Scholar] [CrossRef]
- Kempe, T.; Fröhlich, J. An Improved Immersed Boundary Method with Direct Forcing for the Simulation of Particle Laden Flows. J. Comput. Phys. 2012, 231, 3663–3684. [Google Scholar] [CrossRef]
- Padilla, E.L.M.; Silveira-Neto, A. Large-Eddy Simulation of Transition to Turbulence in a Heated Annular Channel. Comptes Rendus. Mécanique 2005, 333, 599–604. [Google Scholar] [CrossRef]
- Padilla, E.L.M.; Silveira-Neto, A. Large-Eddy Simulation of Transition to Turbulence in Natural Convection in a Horizontal Annular Cavity. Int. J. Heat Mass Transf. 2008, 51, 3656–3668. [Google Scholar] [CrossRef]
- Tsorng, S.J.; Capart, H.; Lai, J.S.; Young, D.L. Three-Dimensional Tracking of the Long Time Trajectories of Suspended Particles in a Lid-Driven Cavity Flow. Exp. Fluids. 2006, 40, 314–328. [Google Scholar] [CrossRef]
- Lo, D.C.; Murugesan, K.; Young, D.L. Numerical Solution of Three-Dimensional Velocity–Vorticity Navier–Stokes Equations by Finite Difference Method. Int. J. Numer. Methods Fluids 2005, 47, 1469–1487. [Google Scholar] [CrossRef]
- Shu, C.; Wang, L.; Chew, Y.T. Numerical Computation of Three-Dimensional Incompressible Navier-Stokes Equations in Primitive Variable Form by DQ Method. Int. J. Numer. Methods Fluids 2003, 43, 345–368. [Google Scholar] [CrossRef]
- Sheu, T.W.H.; Tsai, S.F. Flow Topology in a Steady Three-Dimensional Lid-Driven Cavity. Comput. Fluids 2002, 31, 911–934. [Google Scholar] [CrossRef]
- Shankar, P.N.; Deshpande, M.D. Fluid Mechanics in the Driven Cavity. Annu. Rev. Fluid Mech. 2003, 32, 93–136. [Google Scholar] [CrossRef]
- Gondret, P.; Lance, M.; Petit, L. Bouncing Motion of Spherical Particles in Fluids. Phys. Fluids 2002, 14, 643–652. [Google Scholar] [CrossRef]
- Daroz, V. Investigação Numérica Da Circulação Direta e Reversa No Processo de Perfuração de Poços de Petróleo; Universidade Tecnológica Federal do Paraná: Curitiba, Brazil, 2015. [Google Scholar]
- Sommerfeld, M. Best Practice Guidelines for Computational Fluid Dynamics of Dispersed Multi-Phase Flows. Ercoftac 2008, 129. [Google Scholar]
- Matas, J.P.; Morris, J.F.; Guazzelli, É. Inertial Migration of Rigid Spherical Particles in Poiseuille Flow. J. Fluid. Mech. 2004, 515, 171–195. [Google Scholar] [CrossRef]
- Kosinski, P.; Kosinska, A.; Hoffmann, A.C. Simulation of Solid Particles Behaviour in a Driven Cavity Flow. Powder Technol. 2009, 191, 327–339. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Plane | Position | Number of Particles | Fraction of Particles (%) |
|---|---|---|---|
| A | y/S = 0.994 | 300 | 7.10 |
| B | y/S = 0.750 | 65 | 1.54 |
| C | y/S = 0.501 | 461 | 10.91 |
| D | z/S = 0.500 | 55 | 1.30 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Borges, J.E.; Puelles, S.C.P.; Demicoli, M.; Padilla, E.L.M. Application of the Euler–Lagrange Approach and Immersed Boundary Method to Investigate the Behavior of Rigid Particles in a Confined Flow. Axioms 2023, 12, 1121. https://doi.org/10.3390/axioms12121121
Borges JE, Puelles SCP, Demicoli M, Padilla ELM. Application of the Euler–Lagrange Approach and Immersed Boundary Method to Investigate the Behavior of Rigid Particles in a Confined Flow. Axioms. 2023; 12(12):1121. https://doi.org/10.3390/axioms12121121
Chicago/Turabian StyleBorges, Jonatas Emmanuel, Sammy Cristopher Paredes Puelles, Marija Demicoli, and Elie Luis Martínez Padilla. 2023. "Application of the Euler–Lagrange Approach and Immersed Boundary Method to Investigate the Behavior of Rigid Particles in a Confined Flow" Axioms 12, no. 12: 1121. https://doi.org/10.3390/axioms12121121