
KCC Theory of the Oregonator Model for Belousov-Zhabotinsky Reaction

Abstract
:1. Introduction
2. KCC Theory and Jacobi Stability
Jacobi Stability of Dynamical System
3. Mathematical Model of Oregonator for BZ-Reaction
4. Jacobi Stability of Oregonator Model for BZ-Reaction
4.1. KCC-Invariants of the Oregonator Model
4.2. The Jacobi Stability of the Equilibrium Points of the Oregonator Model
- (i)
- has conjuagte pairs of eigenvalues
- (ii)
- has one positive and one negative eigenvalues
- (iii)
- has one positive and one negative eigenvalues
- has one positive and one negative eigenvalues
- has positive eigenvalues
- has one positive and one negative eigenvalues
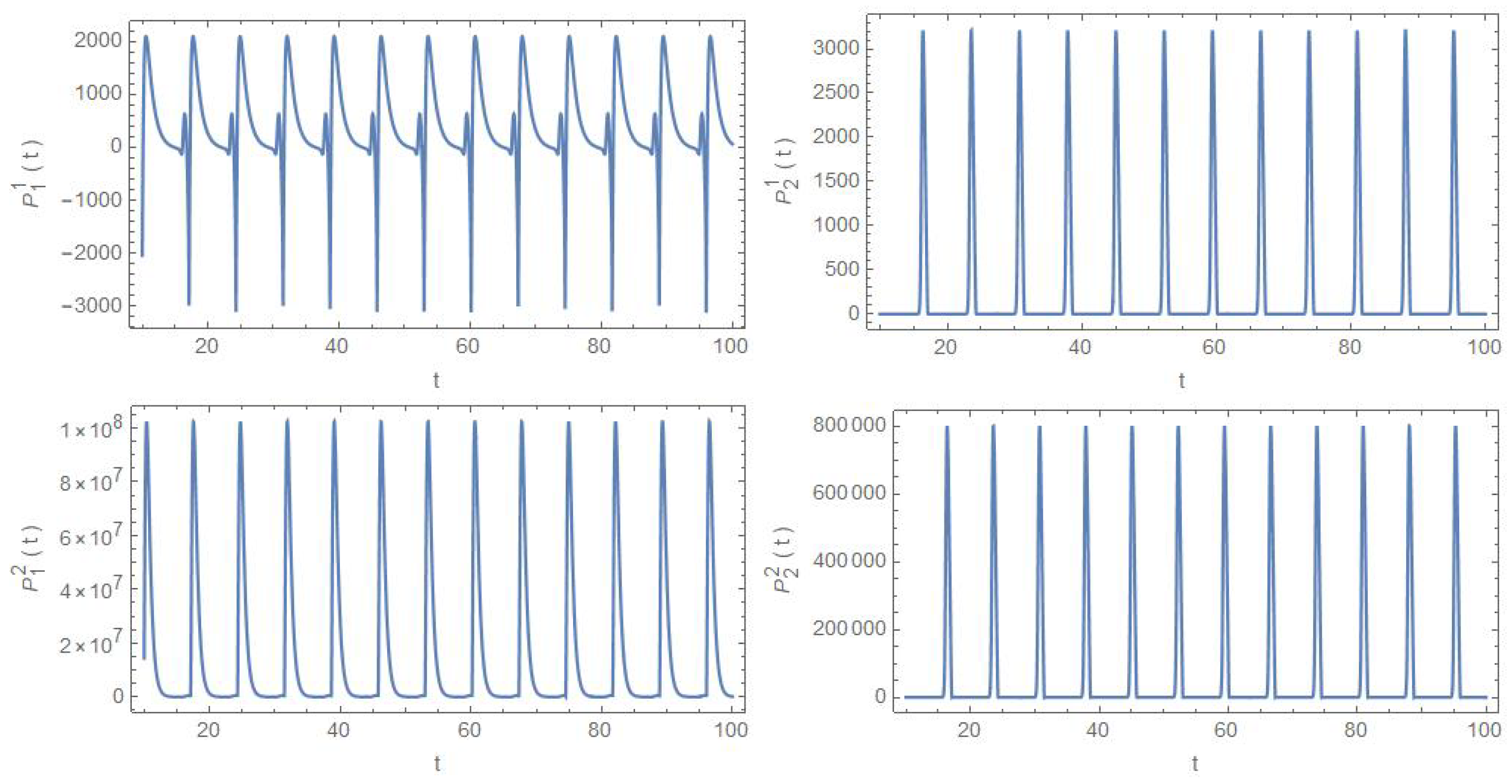
5. Chaotic Behavior of Oregonator Model
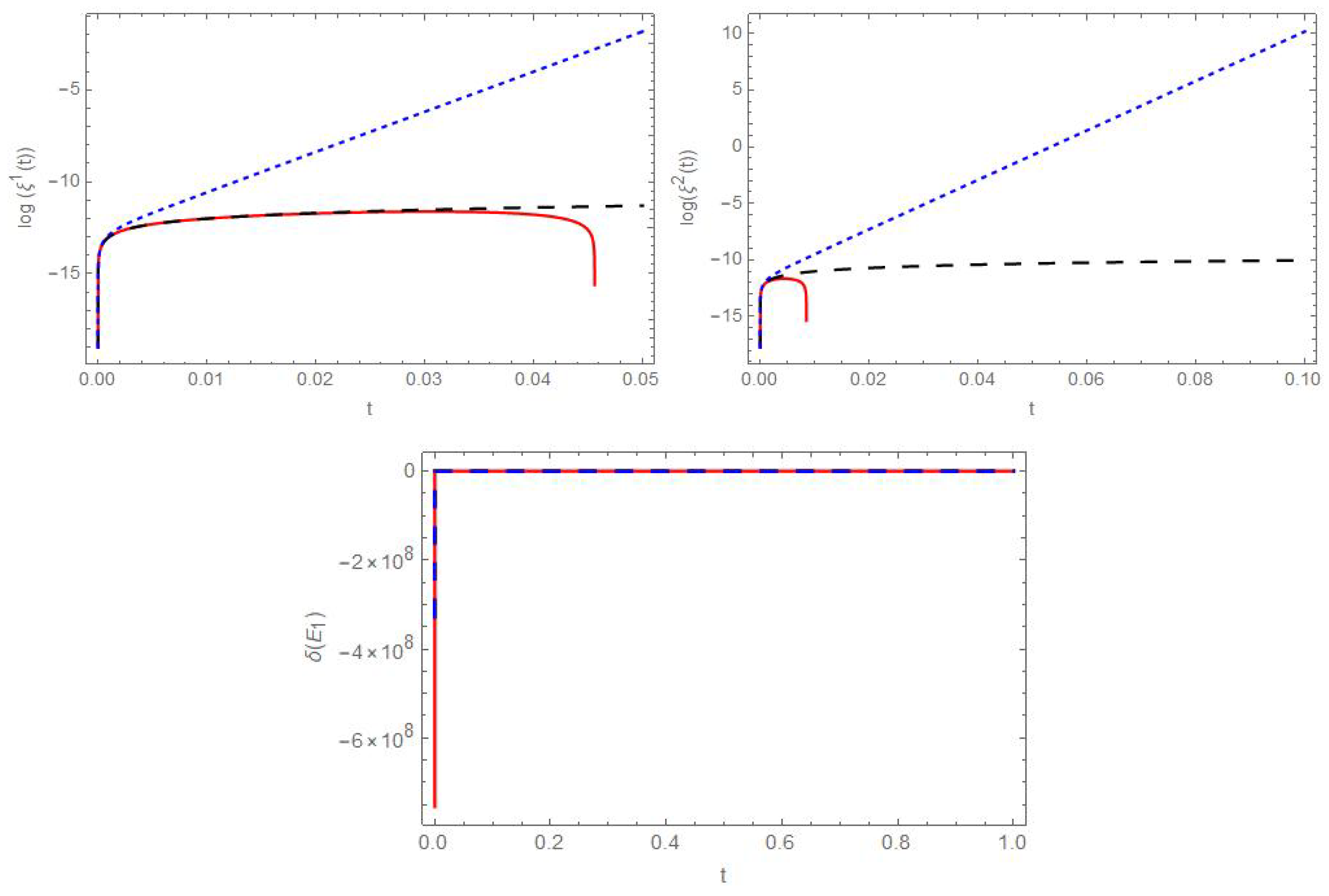
5.1. Behavior of the Deviation Vector near
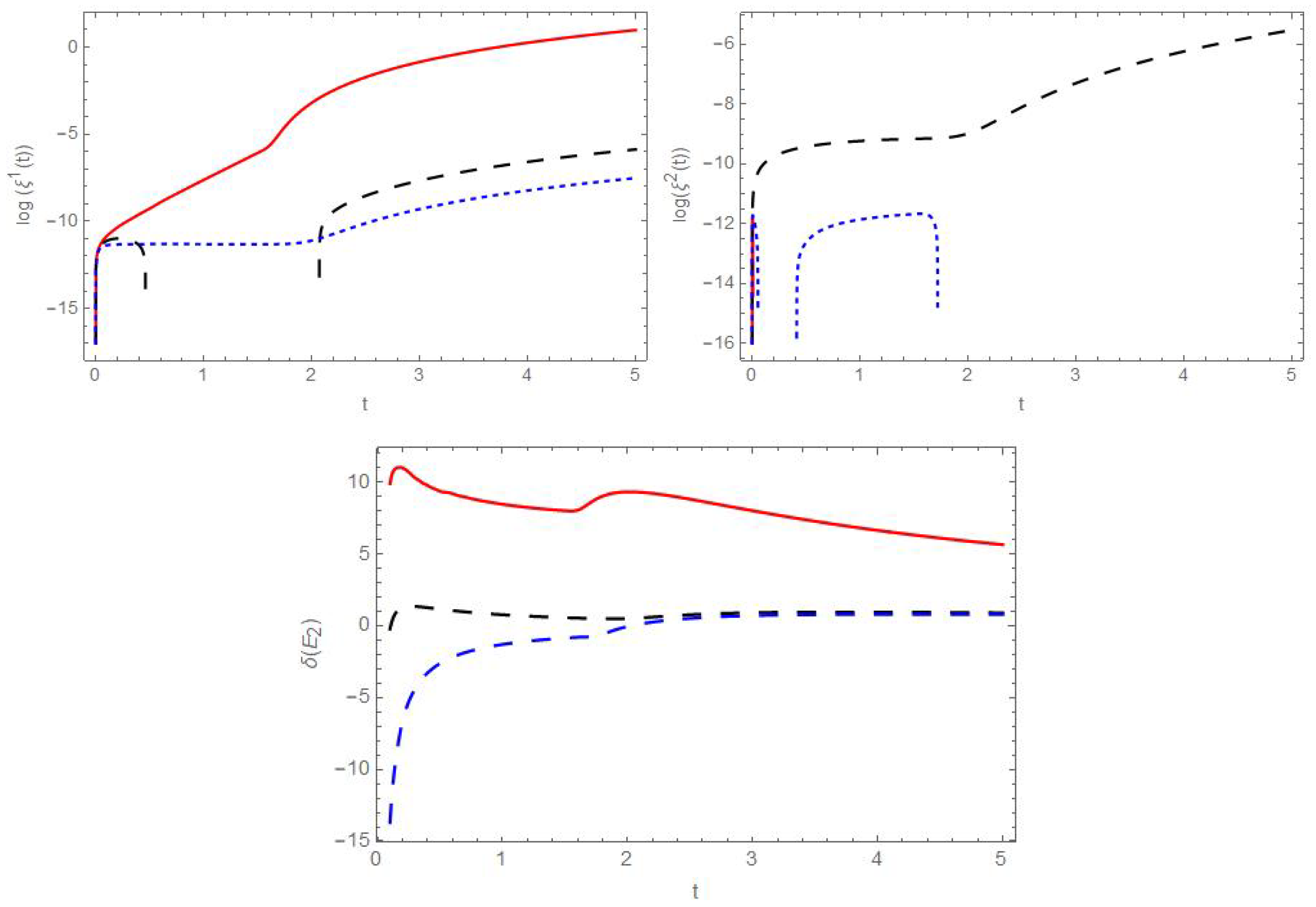
5.2. Behavior of the Deviation Vector near
5.3. Behavior of the Deviation Vector near
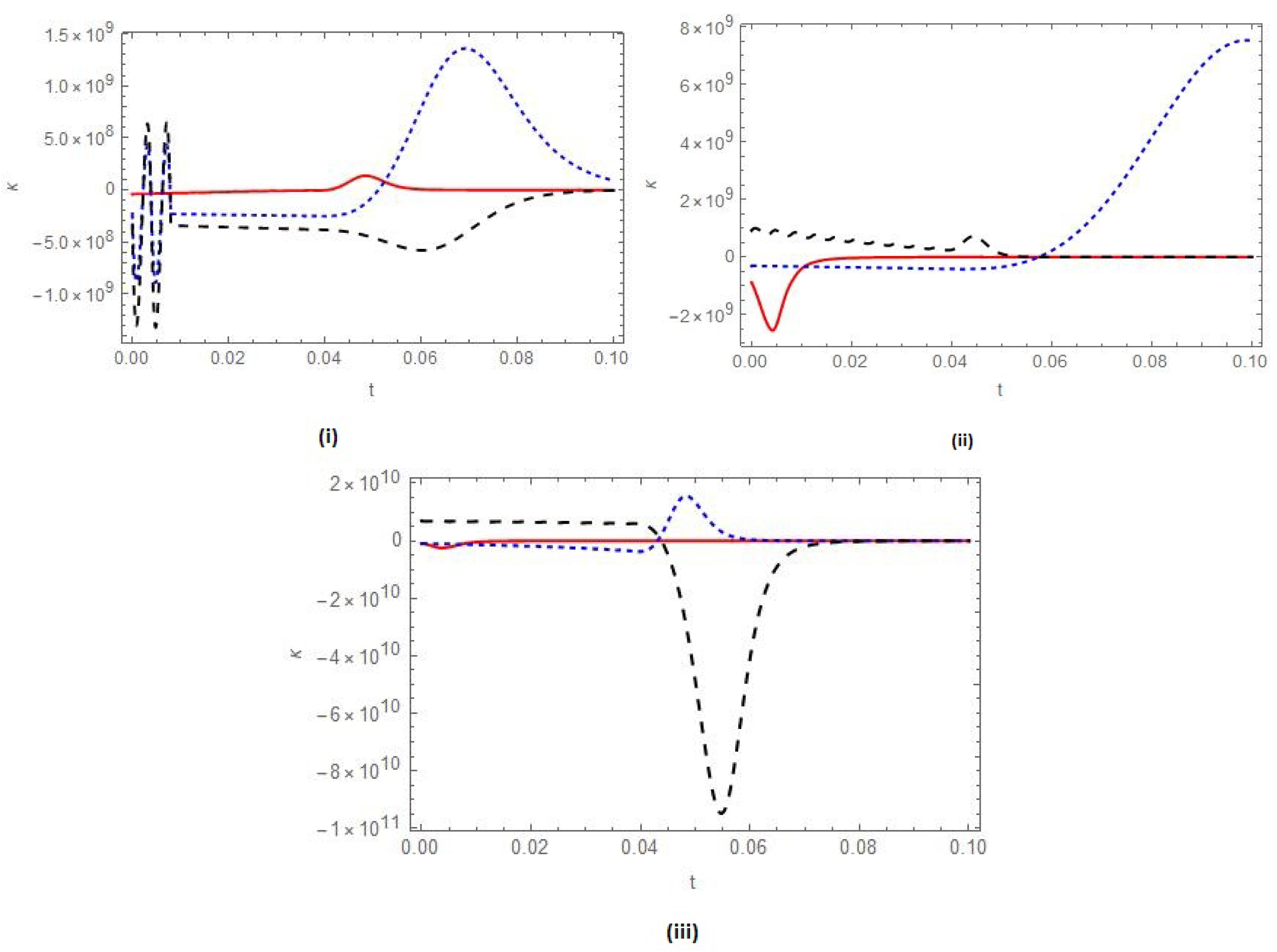
5.4. Curavture of the Deviation Tensor
6. Jacobi Stability vs Linear Stability
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Winfree, A.T. The prehistory of the Belousov-Zhabotinsky oscillator. J. Chem. Educ. 1984, 61, 661. [Google Scholar] [CrossRef]
- Field, R.J.; Noyes, R.M. Oscillations in chemical systems. IV. Limit cycle behavior in a model of a real chemical reaction. J. Chem. Phys. 1974, 60, 1877–1884. [Google Scholar] [CrossRef]
- Lotka, A.J. Undamped oscillations derived from the law of mass action. J. Am. Chem. Soc. 1920, 42, 1595–1599. [Google Scholar] [CrossRef]
- Nicolis, G. Stability and dissipative structures in open systems far from equilibrium. Adv. Chem. Phys. 1971, 19, 209–324. [Google Scholar]
- Cassani, A.; Monteverde, A.; Piumetti, M. Belousov-Zhabotinsky type reaction: The non-linear behavior of chemical systems. J. Math. Chem. 2021, 59, 792–826. [Google Scholar] [CrossRef]
- Pullela, S.R.; Cristancho, D.; He, P.; Luo, D.; Hall, K.R.; Cheng, Z. Temperature dependence of the Oregonator model for the Belousov-Zhabotinsky reaction. Phys. Chem. Chem. Phys. 2009, 11, 4236–4243. [Google Scholar] [CrossRef]
- Kosambi, D.D. Parallelism and path-space. Math. Z. 1933, 37, 608–818. [Google Scholar] [CrossRef]
- Cartan, E. Observations sur le memoire precedent. Math. Z. 1933, 37, 619–622. [Google Scholar] [CrossRef]
- Chern, S.S. Sur la geometrie d’um systemme d’equation differentielles du second ordre. Bull. Sci. Math. 1939, 63, 206–212. [Google Scholar]
- Antonelli, P.L.; Ingarden, R.S.; Matsumoto, M. The Theories of Sprays and Finsler Spaces with Application in Physics and Biology; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1993. [Google Scholar]
- Antonelli, P.L. Equivalence Problem for Systems of Second Order Ordinary Differential Equations. In Encyclopedia of Mathematics; Kluwer Academic Publishers: Dordrecht, The Netherlands, 2000. [Google Scholar]
- Harko, T.; Ho, C.Y.; Leung, C.S.; Yip, S. Jacobi stability analysis of Lorenz system. Int. J. Geom. Methods Mod. Phys. 2015, 12, 1550081. [Google Scholar] [CrossRef]
- Gupta, M.K.; Yadav, C.K. Jacobi stability analysis of modified Chua circuit system. Int. J. Geom. Methods Mod. Phys. 2017, 14, 121–142. [Google Scholar] [CrossRef]
- Gupta, M.K.; Yadav, C.K. Jacobi stability analysis of Rikitake system. Int. J. Geom. Methods Mod. Phys. 2016, 13, 1650098. [Google Scholar] [CrossRef]
- Gupta, M.K.; Yadav, C.K. KCC theory and its application in a tumor growth model. Math. Methods Appl. Sci. 2017, 40, 7470–7487. [Google Scholar] [CrossRef]
- Gupta, M.K.; Yadav, C.K. Rabinovich-Fabrikant system in view point of KCC theory in Finsler geometry. J. Interdiscip. Math. 2019, 22, 219–241. [Google Scholar] [CrossRef]
- Gupta, M.K.; Yadav, C.K.; Gupta, A.K. A geometrical study of Wang-Chen system in view of KCC theory. TWMS J. Appl. Eng. Math. 2020, 10, 1064. [Google Scholar]
- Kumar, M.; Mishra, T.N.; Tiwari, B. Stability analysis of Navier–Stokes system. Int. J. Geom. Methods Mod. Phys. 2019, 16, 1950157. [Google Scholar] [CrossRef]
- Munteanu, F. On the Jacobi Stability of Two SIR Epidemic Patterns with Demography. Symmetry 2023, 15, 1110. [Google Scholar] [CrossRef]
- Munteanu, F.; Grin, A.; Musafirov, E.; Pranevich, A.; Şterbeţi, C. About the Jacobi Stability of a Generalized Hopf–Langford System through the Kosambi–Cartan–Chern Geometric Theory. Symmetry 2023, 15, 598. [Google Scholar] [CrossRef]
- Yadav, C.K.; Gupta, M.K. Jacobi stability Analysis of Lu system. J. Int. Acad. Phys. Sci. 2019, 23, 123–142. [Google Scholar]
- Liu, Y.; Huang, Q.; Wei, Z. Dynamics at infinity and Jacobi stability of trajectories for the Yang-Chen system. Discrete Contin. Dyn. Syst. Ser. 2021, 26, 3357–3380. [Google Scholar] [CrossRef]
- Yamasaki, K.; Yajima, T. KCC analysis of a one-dimensional system during catastrophic shift of the Hill function: Douglas tensor in the nonequilibrium region. Int. J. Bifurc. Chaos 2020, 30, 2030032. [Google Scholar] [CrossRef]
- Feng, C.; Qiujian, H.; Liu, Y. Jacobi analysis for an unusual 3D autonomous system. Int. J. Geom. Methods Mod. Phys. 2020, 17, 2050062. [Google Scholar] [CrossRef]
- Liu, Y.; Chen, H.; Lu, X.; Feng, C.; Liu, A. Homoclinic orbits and Jacobi stability on the orbits of Maxwell–Bloch system. Appl. Anal. 2022, 101, 4377–4396. [Google Scholar] [CrossRef]
- Chen, B.; Liu, Y.; Wei, Z.; Feng, C. New insights into a chaotic system with only a Lyapunov stable equilibrium. Math. Methods Appl. Sci. 2020, 43, 9262–9279. [Google Scholar] [CrossRef]
- Yamasaki, K.; Yajima, T. Kosambi–Cartan–Chern Stability in the Intermediate Nonequilibrium Region of the Brusselator Model. Int. J. Bifurc. Chaos 2022, 32, 2250016. [Google Scholar] [CrossRef]
- Yamasaki, K.; Yajima, T. Kosambi–Cartan–Chern Analysis of the Nonequilibrium Singular Point in One-Dimensional Elementary Catastrophe. Int. J. Bifurc. Chaos 2022, 32, 2250053. [Google Scholar] [CrossRef]
- Boehmer, C.G.; Harko, T.; Sabau, S.V. Jacobi stability analysis of dynamical systems-applications in gravitation and cosmology. Adv. Theor. Math. Phys. 2012, 16, 1145–1196. [Google Scholar] [CrossRef]
- Gupta, M.K.; Yadav, C.K. Jacobi stability analysis of Rossler system. Int. J. Bifurc. Chaos 2017, 27, 1750056. [Google Scholar] [CrossRef]
- Rahman, Q.I.; Schmeisser, G. Analytic Theory of Polynomials; London Mathematical Society Monographs, New Series; Oxford University Press: Oxford, UK, 2002; Volume 26. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scaling Factor of the Oregonator Model | ||
|---|---|---|
| X | ||
| Y | ||
| Z | ||
| T | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gupta, M.K.; Sahu, A.; Yadav, C.K.; Goswami, A.; Swarup, C. KCC Theory of the Oregonator Model for Belousov-Zhabotinsky Reaction. Axioms 2023, 12, 1133. https://doi.org/10.3390/axioms12121133
Gupta MK, Sahu A, Yadav CK, Goswami A, Swarup C. KCC Theory of the Oregonator Model for Belousov-Zhabotinsky Reaction. Axioms. 2023; 12(12):1133. https://doi.org/10.3390/axioms12121133
Chicago/Turabian StyleGupta, M. K., Abha Sahu, C. K. Yadav, Anjali Goswami, and Chetan Swarup. 2023. "KCC Theory of the Oregonator Model for Belousov-Zhabotinsky Reaction" Axioms 12, no. 12: 1133. https://doi.org/10.3390/axioms12121133