Abstract
The paper is concerned with equilibrium problems for two elastic plates connected by a crossing elastic bridge. It is assumed that an inequality-type condition is imposed, providing a mutual non-penetration between the plates and the bridge. The existence of solutions is proved, and passages to limits are justified as the rigidity parameter of the bridge tends to infinity and to zero. Limit models are analyzed. The inverse problem is investigated when both the displacement field and the elasticity tensor of the plate are unknown. In this case, additional information concerning a displacement of a given point of the plate is assumed be given. A solution existence of the inverse problem is proved.
MSC:
35B30; 35J88
1. Introduction
Bridged structures are very popular for solving connecting problems. Such structures may be different in type, and their quality depends on the purposes addressed. In this paper, we analyze the structure consisting of two Kirchhoff–Love elastic plates and a junction (bridge) that is in contact with the plates. To describe the behavior of the bridge, we use the Euler–Bernoulli beam model. The junction has the displacement coinciding with the displacement of the plates at two fixed points. Moreover, an inequality-type restriction is assumed to be imposed for the solution to provide a mutual non-penetration between the plates and the bridge. This approach implies that the problem is formulated as a free boundary one.
During the last years, boundary-value problems in elasticity with inequality-type boundary conditions have been under active study. We can refer the reader to the books [1,2] containing results for crack models with the non-penetration boundary conditions for a wide class of elasticity problems. There are many papers related to thin inclusions incorporated into elastic bodies. In the case of delamination of the surrounding elastic body from the inclusion, one more difficulty appears since we obtain an interfacial crack. We pay attention to the paper [3] where an equilibrium problem for two elastic plates is analyzed in the case of thin incorporated inclusion and Neumann type boundary conditions for the plate. Different properties of solutions in equilibrium problems for elastic bodies with thin rigid, semi-rigid, and elastic inclusions and cracks are analyzed in [4,5,6,7,8,9,10,11,12,13] and many other papers. In [14,15,16], one can find models for the analysis of non-homogeneous elastic bodies. Note that a derivation of models for elastic bodies with thin inclusions usually takes into account changing physical and geometrical parameters [17,18,19]. Contact problems for elastic plates with thin elastic structures were analyzed in [20,21]. We can also mention a number of applied studies related to thin inclusions of different nature in elastic bodies [22,23,24,25,26,27,28,29]. An application of the finite element method for planar mechanical elastic systems can be found in [30]. As for inverse problems in elasticity, the literature in this field is very vast. We will only mention the articles [31,32] and the links in them.
The structure of the paper is as follows. Section 2 addresses variational and differential formulations of the equilibrium problem. Passages to limits, as a rigidity parameter of the bridge tends to infinity and to zero, are investigated in Section 3 and Section 4. We provide a justification of the limit procedure and analyze the limit models. Section 5 is concerned with the analysis of the inverse problem.
2. Setting the Problem
Let be bounded domains with Lipschitz boundaries respectively, such that Assume that is divided into two smooth parts and We set Moreover, we assume that and b crosses see Figure 1. Denote by unit normal vectors to , respectively, and set
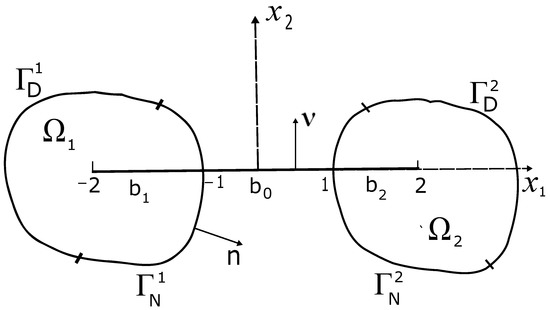
Figure 1.
Elastic plates with crossing bridge b.
The set corresponds to two elastic plates, and b fits to a thin elastic crossing bridge between two plates. We describe b in the frame of the Euler–Bernoulli beam model. In what follows, the crossing bridge b will be characterized by a rigidity parameter At the first step, this parameter is fixed being equal to 1, and in the sequel we analyze passages to the limit as goes to infinity and to zero.
Let w be a scalar-valued function. We use the notations If then We also put Summation convention over repeated indices is used; all functions with two lower indices are assumed to be symmetric in those indices.
In the domains , elasticity tensors are considered with the usual properties of symmetry and positive definiteness,
Similar properties are fulfilled for the tensor B on
We introduce notations for a bending moment and a transverse force on the boundaries of the plates,
In this case, for smooth functions the following Green’s formula holds, see [2], Section 1.2.3,
Since the domain with the cut is a union of the domains and , the above Green’s formula allows us to write Green’s formula for
where is a jump of a function h on are the traces of h on the crack faces . The signs ± fit to positive and negative directions of the values with the normal vector are defined on b similar to (2).
In view of the above notations, an equilibrium problem for the plates and the crossing bridge b is formulated as follows. Given external forces acting on the plates and the crossing bridge, respectively, we have to find a displacement of the plates ; a moment tensor defined in respectively; and a crossing bridge displacement v defined on b such that
Here, The tensor E is equal to in respectively. Functions defined on b we identify with functions of the variable
Relations (4) and (5) are the equilibrium equations for the Kirchhoff–Love elastic plates and the constitutive law; (6) is the Euler–Bernoulli equilibrium equations for the crossing bridge parts , see [1,2]. The right-hand side in (6) describes forces acting on from the elastic plates. The first inequality in (9) provides a non-penetration between the plates and the bridge. Relation (11) provides glue conditions at the points where the bridge b crosses the external boundaries of the elastic plates. Note that, by (9), the contact set between the plates and the bridge is unknown.
We can provide a variational formulation of the problem (4)–(11). Introduce the space
with the norm
where are the usual Sobolev spaces,
and consider the energy functional
Here,
Denote by S the set of admissible displacements,
and consider the problem:
This minimization problem has a unique solution since the functional is weakly lower semicontinuous and coercive. The coercivity of the functional follows from the Dirichlet boundary conditions on the sets for the function w and conditions . The set S is weakly closed. The solution of the problem satisfies the following variational inequality
Proof.
Assume that (12) and (13) hold. We can substitute in (13) test functions of the form This provides the equilibrium Equation (4) fulfilled in the distributional sense. Next, test functions of the form can be substituted in (13), where on Taking into account the equilibrium Equation (4) and Green Formula (3), we obtain
From here, it follows
Now, test functions of the form are substituted in (13), This gives
Choosing the above inequality on , the following equation
is derived. To proceed, take test functions of the form in (3), The following relation is obtained:
Thus,
Now, we are aiming to derive the last relation of (9). Assume that the inequality holds at a point In this case, we can take as a test function in (13), where the support of belongs to a small neighborhood of the support of belongs to a small neighborhood of the point , and is small. This implies
In particular, this provides
This means that
The next step of our reasoning is to derive boundary conditions for v at the points and the last condition of (7). To this end, we take test function in (13) of the form on It provides the equality
Applying the Green Formula (3), this relation implies
From here, it follows that
Consequently,
Integrating by parts in the second and the third integrals of (20) and using the Formula (3), it follows that
3. Convergence of Rigidity Parameter to Infinity
In this section, we introduce a positive bridge rigidity parameter into the model (12) and (13) and analyze a passage to the limit as . Our aim is to justify this passage to the limit and investigate the limit model. Instead of (12) and (13), for any , consider the following problem
The solution of this problem is supplied with the index Note that we can write an equivalent differential formulation of the problem (23) and (24) similar to (4)–(11). In this case, instead of (6) we have the following equations for the crossing bridge
In what follows, we justify a passage to the limit as in (23) and (24). At the first step, a priori estimates of the solutions are derived.
On the other hand, since consequently, v = 0 on b.
Then introduce the set of admissible displacements for the limit problem,
We take any element . Then, Substitute this function in (24). By (28) and (29), it is possible to pass to the limit in (23) and (24) as The limit relations are of the form
Thus, we have shown the following result.
Theorem 2.
To conclude this section, we provide a differential formulation of the problem (30) and (31): find functions defined in respectively, such that
4. Convergence of Rigidity Parameter of to Zero
In this section, we assume that on A convergence to zero of the rigidity parameter will be analyzed when assuming that a change of this parameter happens at . In this case, the rigidity parameter at is fixed and is equal to 1.
We first provide a formulation of the equilibrium problem such as (4)–(11) for this case: find functions defined in respectively, and functions defined on b such that
The problem (39)–(47) can be formulated in a variational form. Indeed, consider the energy functional
Then, the problem
has a solution satisfying the variational inequality
In what follows, we aim to justify a passage to the limit in (48) and (49) as From (48) and (49), the following relation is obtained:
From (51) it follows that uniformly in
Here, and in (55) below, we should take upper or below signs simultaneously. Taking into account the conditions
we obtain for small that
Thus, we can assume that as
Now, introduce the set of admissible displacements for the limit problem
Take and extend the function to assuming that the extension belongs to the space In this case and we can substitute in (48) and (49) as a test function. Passing to the limit as by (53), (56), the following variational inequality is obtained:
Thus, the following statement is proved.
Theorem 4.
To conclude the section, we provide a differential formulation of the problem (57) and (58): find a displacement of the elastic plates a moment tensor defined in respectively, and a function v defined on such that
The following statement is valid.
Theorem 5.
We omit the proof of this theorem since it is reminiscent of that of Theorem 1. The only step we have to take is to provide a proof that from (57) and (58) the boundary conditions (66) follow. Indeed, take in (57) and (58) test functions of the form on This gives
Since the equilibrium equations (59), (61) hold, and since , the relation (68) implies boundary conditions (66) and the second group of boundary conditions (62).
Theorem 5 is proved.
5. Analysis of Inverse Problem
In this section, we analyze an inverse problem related to the equilibrium problem (12) and (13). Elasticity tensors are assumed to be constant. The inverse problem consists in finding displacement fields of the plates and the bridge together with an elasticity tensor A when assuming that additional data are provided by measurement. More precisely, it is assumed that for a given continuous function a value is known, where is the displacement of the plate at a given point , In particular, we can assume that Note that from a practical standpoint, it is no problem to provide measurements for finding a displacement of the point ; consequently, We first introduce the 6D space with the Euclidean metric,
Let be a bounded domain with a smooth boundary whose elements satisfy the inequality (1). Then, for any and the fixed tensor B it is possible to find a solution of the variational inequality
where with the given tensor
Now, we assume that the elasticity tensor A is unknown in the problems (69) and (70). On the other hand, the plate displacement of the point is known. Namely, is known from a measurement. Then, the precise formulation of the inverse problem is as follows. Let be given. We have to find such that
Proof.
We introduce a function L defined on the closed set
where is the solution of the direct problem (69) and (70) with the given elasticity tensor A. In what follows, we prove that this function is continuous on the set Indeed, let
where we use the convergence in the Euclidean norm . For any we can find the unique solution of the problem
where fits the elasticity tensor The variational inequality (76) and (77) implies
Choosing a subsequence, if necessary, we can assume that as ,
By (75), (80), a passage to the limit in (76) and (77), as is possible, and the limit relation reads as follows:
Consequently, we have
Moreover, by (80), we can assume that as ; consequently,
We proved, therefore, that the function L is continuous on the compact set By the Weierstrass extreme value theorem, this means that we can find
Taking into account the intermediate value theorem for continuous functions, we conclude that for any exists such that
6. Conclusions
The paper presents a rigorous mathematical analysis of the elastic structure consisting of two Kirchhoff–Love plates and the crossing 1D bridge. An inequality-type restriction is imposed on the solution, which provides a mutual non-penetration between the plates and the bridge. This restriction implies that the boundary-value problem as a whole refers to the problem with unknown set of a contact. The solution existence of the problem is established, and asymptotic analysis is fulfilled with respect to the rigidity parameter of the bridge as this parameter tends to infinity and to zero. Therefore, in the frame of the high-level mathematical model, we provide a correctness of the boundary-value problem and analyze the limit mathematical models. Moreover, the existence of a solution to the inverse problem is proved, which allows us to find both the displacement field and the elasticity tensor of one plate provided that a displacement of the other plate at a given point is known.
Funding
This work was supported by Mathematical Center in Akademgorodok under agreement No. 075-15-2019-1613 with the Ministry of Science and Higher Education of the Russian Federation.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Khludnev, A.M.; Kovtunenko, V.A. Analysis of Cracks in Solids; WIT Press: Southampton, UK; Boston, MA, USA, 2000. [Google Scholar]
- Khludnev, A.M. Elasticity Problems in Nonsmooth Domains; Fizmatlit: Moscow, Russia, 2010. [Google Scholar]
- Khludnev, A.M. Asymptotics of solutions for two elastic plates with thin junction. Sib. Electr. Math. Rep. 2022, 19, 484–501. [Google Scholar]
- Caillerie, D. The effect of a thin inclusion of high rigidity in an elastic body. Math. Methods Appl. Sci. 1980, 2, 251–270. [Google Scholar] [CrossRef]
- El Jarroudi, M. Homogenization of an elastic material reinforced with thin rigid von Karman ribbons. Math. Mech. Solids 2018, 24, 1–27. [Google Scholar] [CrossRef]
- Lazarev, N.; Itou, H. Optimal location of a rigid inclusion in equilibrium problems for inhomogeneous Kirchhoff–Love plates with a crack. Math. Mech. Solids 2019, 24, 3743–3752. [Google Scholar] [CrossRef]
- Khludnev, A.M.; Popova, T.S. Semirigid inclusions in elastic bodies: Mechanical interplay and optimal control. Comp. Math. Appl. 2019, 77, 253–262. [Google Scholar] [CrossRef]
- Lazarev, N. Shape sensitivity analysis of the energy integrals for the Timoshenko-type plate containing a crack on the boundary of a rigid inclusion. Z. Angew. Math. Phys. 2015, 66, 2025–2040. [Google Scholar] [CrossRef]
- Rudoy, E.M. Domain decomposition method for crack problems with nonpenetration condition. ESAIM Math. Model. Numer. Anal. 2016, 50, 995–1009. [Google Scholar] [CrossRef]
- Rudoy, E.M. On numerical solving a rigid inclusions problem in 2D elasticity. Z. Angew Math. Phys. 2017, 68, 19. [Google Scholar] [CrossRef]
- Shcherbakov, V.V. Shape optimization of rigid inclusions in elastic plates with cracks. Z. Angew. Math. Phys. 2016, 67, 71. [Google Scholar] [CrossRef]
- Shcherbakov, V.V. Energy release rates for interfacial cracks in elastic bodies with thin semirigid inclusions. Z. Angew. Math. Phys. 2017, 68, 26. [Google Scholar] [CrossRef]
- Khludnev, A.M.; Leugering, G.R. Delaminated thin elastic inclusion inside elastic bodies. Math. Mech. Complex Syst. 2014, 2, 1–21. [Google Scholar] [CrossRef]
- Mallick, P. Fiber-Reinforced Composites: Materials, Manufacturing, and Design; Marcel Dekker: New York, NY, USA, 1993. [Google Scholar]
- Kozlov, V.A.; Ma’zya, V.G.; Movchan, A.B. Asymptotic Analysis of Fields in a Multi-Structure; Oxford Mathematical Monographs; Oxford University Press: New York, NY, USA, 1999. [Google Scholar]
- Panasenko, G. Multi-Scale Modelling for Structures and Composites; Springer: New York, NY, USA, 2005. [Google Scholar]
- Rudoy, E. Asymptotic justification of models of plates containing inside hard thin inclusions. Technologies 2020, 8, 59. [Google Scholar] [CrossRef]
- Furtsev, A.; Rudoy, E. Variational approach to modeling soft and stiff interfaces in the Kirchhoff–Love theory of plates. Int. J. Solids Struct. 2020, 202, 562–574. [Google Scholar] [CrossRef]
- Gaudiello, A.; Sili, A. Limit models for thin heterogeneous structures with high contrast. J. Diff. Equat. 2021, 302, 37–63. [Google Scholar] [CrossRef]
- Furtsev, A.I. On contact between a thin obstacle and a plate containing a thin inclusion. J. Math. Sci. 2019, 237, 530–545. [Google Scholar] [CrossRef]
- Furtsev, A.I. Differentiation of the energy functional with respect to the length of delamination in the problem of the contact of a plate and a beam. Sib. Electr Math Rep. 2018, 15, 935–949. [Google Scholar]
- Pasternak, I.M. Plane problem of elasticity theory for anisotropic bodies with thin elastic inclusions. J. Math. Sci. 2012, 186, 31–47. [Google Scholar] [CrossRef]
- Ballarini, R. Elastic stress diffusion around a thin corrugated inclusion. IMA J. Appl. Math. 2011, 76, 633–641. [Google Scholar] [CrossRef]
- Dong, C.Y.; Kang, Y.L. Numerical analysis of doubly periodic array of cracks/rigid-line inclusions in an infinite isotropic medium using the boundary integral equation method. Int. J. Fract. 2005, 133, 389–405. [Google Scholar] [CrossRef]
- Goudarzi, M.; Dal Corso, F.; Bigoni, D.; Simone, A. Dispersion of rigid line inclusions as stiffeners and shear band instability triggers. Int. J. Solids Struct. 2021, 210–211, 255–272. [Google Scholar] [CrossRef]
- Saccomandi, G.; Beatty, M. Universal relations for fiber-reinforced elastic materials. Math. Mech. Solids 2002, 7, 99–110. [Google Scholar] [CrossRef]
- Hu, K.X.; Chandra, A.; Huang, Y. On crack, rigid-line fiber, and interface interactions. Mech. Mater. 1994, 19, 15–28. [Google Scholar] [CrossRef]
- Bellieud, M.; Bouchitte, G. Homogenization of a soft elastic material reinforced by fibers. Asymptot. Anal. 2002, 32, 153–183. [Google Scholar]
- Pingle, P.; Sherwood, J.; Gorbatikh, L. Properties of rigid-line inclusions as building blocks of naturally occurring composites. Compos. Sci. Technol. 2008, 68, 2267–2272. [Google Scholar] [CrossRef]
- Scutaru, M.L.; Vlase, S.; Marin, M.; Modrea, A. New analytical method based on dynamic response of planar mechanical elastic systems. Bound Value Probl. 2020, 1, 104. [Google Scholar] [CrossRef]
- Khludnev, A.M. Inverse problem for elastic body with thin elastic inclusion. J. Inverse Ill-Posed Probl. 2020, 28, 195–209. [Google Scholar] [CrossRef]
- Khludnev, A.M.; Fankina, I.V. Equilibrium problem for elastic plate with thin rigid inclusion crossing an external boundary. Z. Angew. Math. Phys. 2021, 72, 121. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).