1. Introduction
Recently, there has been a compelling need to quantify uncertainties of parameters in physical and mathematical problems in a probabilistic framework. This includes cases that can be characterized by stochastic partial differential equations (SPDEs). Theses equations appear in many application fields, for example, solid mechanics, random vibrations, fluid dynamics [
1,
2,
3], propagation of waves through random media [
4,
5,
6], and finance [
7]. Stochastic forcing, uncertainties in one or more physical parameters, and initial and/or boundary values, among others, are contributing to stochasticity in many disciplines.
Burgers’ equation is one of many important models that appear in many applications specially in fluid mechanics. When considering the stochastic effects added to Burgers’ equation, it will be extended to study some real-life applications such as the flow turbulence. There are various techniques that can be used to study and analyze such stochastic models. The Monte Carlo (MC) simulation [
8,
9,
10] is one of the most practical methods, using a sequence of random numbers to handle these problems and get useful statistical properties. To attain a certain accuracy level, a sufficient number of samples are required. More studies have been applied to improve the MC efficiency such as sequential Monte Carlo methods [
11,
12] and the Error Subspace Statistical Estimation (ESSE) [
13,
14]. The MC-based techniques still have a relatively low rate of convergence and/or do not work efficiently for the general case [
15].
Order-reduction techniques have been employed to simplify and analyze high-dimensional complicated systems relative to several scientific and engineering problems. Hence, they provide lower complexity for the original SPDE model. One of these approaches is the Proper Orthogonal Decomposition (POD) [
16], which is based on the statistical technique of Karhunen-Loeve (KL) expansion. The main drawback is that the spatial basis of the POD method is selected a
priori, which means that it may be unable to describe some problems, such as transient fluid flows, which are highly time-dependent and make the basis used irrelevant as time evolves.
Ghanem and Spanos [
17] introduced an important and widely used approach known as the Polynomial Chaos (PC) expansion, which is based on Wiener’s theory on polynomial chaos [
18]. The main drawback is that the PC suffers from problems relying on long time dependence, although it is well known that the PC method shows fast convergence rates for Gaussian processes. Other types of processes may have slower convergence rates in addition to solution deterioration with time evolution. The generalized PC expansion (gPC) introduced by Xiu and Karniadakis [
19,
20] uses different basis functions for different types of problems and is employed to increase the rate of convergence and to improve the efficiency of a wide range of nonlinear applications. The Probabilistic Collocation Method (PCM) [
21] is an efficient version derived from PC that provides a smooth solution in parametric spaces and gives fast convergence rates as the order of the expansion increases [
22,
23].
The PC can also be extended to analyze the stochastic differential equations (SDEs) which are derived by or include white noise. The Wiener chaos expansion (WCE) and the Wiener-Hermite expansion (WHE) are common techniques used for analyzing SDEs [
24]. The fractional-order version of the WHE was recently developed for the case of fractional Brownian motion [
25].
In the current study, we shall focus on analyzing Burgers’ model with stochastic forcing. The stochastic Burgers’ model is common in studying flow turbulence and in general the propagation of randomness and nonlinear waves in the undispersive media [
24]. The same type of nonlinearity of Burgers’ equation exists as in Navier-Stokes equations. Results obtained from solving the 1D stochastic Burgers’ equation are similar to experimental results of the 3D real turbulence problems.
Dynamical Orthogonal (DO) decomposition is introduced in [
26,
27] as one of the reduced-order techniques in which the solution is approximated in a generalized KL expansion, i.e.,
where
x is an
n-dimension space vector,
t > 0 is the time,
is the output of a random experiment,
represents the number of approximating modes,
is the mean field, and
are orthonormal time-dependent fields in the spatial domain. The stochastic processes
are usually considered to be with zero mean without loss of generality. Both spatial basis and the stochastic coefficients have a time dependency. As a result, the above KL representation is particularly flexible when it comes to represent nonstationary, highly transient responses. On the other hand, the same property adopts a redundant representation. To overcome this redundancy in both stochastic coefficients and spatial basis, a natural constraint is imposed, called the dynamical orthogonal condition [
26]. By means of this condition, the DO components, i.e.,
and
, can be derived.
From a computational viewpoint, the uncertainty evolution using DO decomposition is accomplished by determining a set of deterministic PDEs that describe the mean field evolution and the basis coupled with (ordinary) SDEs that describe the evolution of stochastic coefficients . The DO equations reach a singularity at very low levels of uncertainty when the modes develop independently. Therefore, this may generate a numerical issue since the computations include ratios of small moment quantities, particularly in problems where deterministic initial conditions are included. The initialization of the random space is another issue that arises when starting with deterministic initial conditions.
To address these issues, a hybrid approach is introduced in [
28] that avoids the singularity that occurs in the covariance matrix. This hybrid approach was formulated by integrating the PC with the DO method. Firstly, the PC is used in solving the SPDE up to a certain time until guaranteeing the development of stochasticity. Next, the DO approach is used to continue the solution with time evolution. As part of this strategy, the KL expansion is employed to give a collection of modes that are used for initializing the stochastic coefficients.
In the current work, we study the stochastic Burgers’ model using the DO method and compare it with the PC from different sides including error behavior, effect of switching time, and the number of modes and their effect on solution accuracy. Moreover, the error between DO components and the growth of eigenvalues are computed. The DO behavior for the case of inviscid Burgers’ equation and shock wave formation is also analyzed in the current work. Suitable known techniques, such as upwind techniques [
29], are combined with the DO method to analyze the shock formation in the presence of random coefficients.
The paper is structured as follows: In
Section 2, we provide a brief overview of the construction of the DO representation, the evolution equations, and their numerical solution. A hybrid approach combining the DO and PC is presented. In
Section 3, the performance of the DO and PCM methods are compared by analyzing the stochastic viscous and inviscid Burgers’ equations. In
Section 4, we study shock wave formation via inviscid Burgers’ equation. In
Section 5, we present the conclusions.
2. Methodology
Consider the probability space (
) where the sample space
contains all the elementary events
is the
-algebra of the subsets of
, and
is the probability measure. The random field will be defined for all measurable maps with the form
. The mean value operator of
is formulated as follows:
The set of continuous random fields that are square integrable, i.e.,
, where the transpose of
is
for all
; where
D is the domain and
T is the time interval. The covariance operator, between two random fields
and
, has the bi-linear form:
where
and forms a Hilbert space
H [
4,
30]. For the random
the projection operator
to subspace spanned by the orthonormal basis
is defined as follows:
We define the autocovariance operator for
in the case
as follows:
where
. Then, we define the integral operator at a given time
which depends on the autocovariance operator as follows:
and it is a positive operator, compact and self-adjoint in the Hilbert space
of a deterministic, square-integrable, and continuous field
[
16,
31].
In the current work, we shall consider the following evolution SPDE:
where
is the differential operator, generally nonlinear. The system initial condition at time
is given by the random field:
and the boundary conditions take the form:
where
is a differential linear operator and
is the boundary of domain
in
and
or
.
2.1. DO Method
For every random field
, the KL expansion [
29,
30] at time
can be written as:
where
are the eigenfunctions and
are stochastic processes. We can obtain the eigenfunctions and eigenvalues of the covariance matrix
of
by solving:
where
are orthonormal eigenfunctions, i.e.,
. Then, we can approximate the random field
by a finite
N-modes series expansion as:
The stochastic subspace is defined as the space spanned by the eigenfunctions of the largest eigenvalues. It is worth noting that the spatial basis and stochastic coefficients are recognized to have a time-dependent nature, and they change in relation to system dynamics.
The mean component
the orthogonal basis
, and the stochastic coefficients
are all time-dependent and they are varyingly redundant. The main cause of redundancy arises from the uncertainty of evolution. In order to solve this redundancy, we can limit the basis
evolution to be only orthogonal to the space
by imposing additional constraints. For example, we can apply the following orthogonality constraint:
This constraint is known as the dynamical orthogonal condition [
26,
32]. This is also equivalent to preserving the basis
orthogonality for all times since:
The DO expansion is used to obtain a set of independent equations characterizing all deterministic and stochastic quantities. Using DO, we will be able to reduce the SPDE to a set of deterministic PDEs for and coupled with ordinary differential equations in the stochastic coefficients .
Under the DO representation, the main SPDE (6)–(8) can be reformulated into the following system of equations [
26]:
where
is the orthogonal complement projection, and
is the covariance operator for the stochastic coefficients. The related boundary values are given by:
where
and the initial conditions at time
have the form:
for
, and
are the eigenfunctions associated with the covariance operator
.
2.2. Numerical Solution
The DO evolution Equations (14)–(16) include numerical integration for both random and physical spaces. We denote the weights and collocation points of the spatial space by and for the random space by . We can use Fourier collocation points for and Legendre-Gauss collocation for . To discretize time, explicit procedures can be used such as Euler’s method and 4th-order Runge-Kutta (RK4) method. The inner products included in the KL equations can be evaluated as:
The evolution equations of the DO representation (14)–(16) can be alternatively reformulated into a matrix form as follows:
where:
Practically, in several cases, the initial conditions are deterministic, and the stochasticity emanates from other causes such as random forcing and random coefficients. In this case, the stochastic basis
will be initially zero, and hence the covariance matrix for the stochastic coefficients
will be singular. For this reason, a hybrid approach, combining the PCM and DO methods, is proposed to overcome this problem [
28]. We can start the computation with the PCM method to allow the development of randomness up to a certain converting (switching) time
, then transform to the DO method and use KL expansion to initialize the DO components
and
[
33,
34].
3. Demonstrating Examples
In this section, we shall consider using the DO and PCM-DO methods to analyze Burgers’ viscous and inviscid models with random parameters. For the numerical computations, we shall consider the following parameters:
where
refers to the number of collocation points in the physical domain and
is the number of points in the random domain. The physical domain is discretized using the Fourier collocation points, while the random space is discretized using the Legendre-Gauss collocation. The RK4 method is employed for the time-integrator. At
, the stochastic variations are zero; i.e.,
and
cannot be declared. The DO representation could not be initialized at
. Therefore, we start the simulation at
to avoid the singularity issue due to the presence of deterministic (nonrandom) initial conditions. The mean, variance, and stochastic and spatial bases of the DO representation are initiated with the modes obtained from KL expansion.
Alternatively, the hybrid PCM-DO approach is used to overcome the singularity due to deterministic initial conditions. In this case, we start the numerical computation using the PCM method up to a switching time to guarantee that the stochasticity is evolved, then we use the KL decomposition to initialize the DO components and hence switch to the DO method.
For comparison and validation, a reference solution using the PCM method with RK4 is considered. The reference solution will use similar parameters as in the DO and PCM-DO methods.
3.1. Stochastic Burgers’ Equation
Considering the viscous Burgers’ equation with stochastic forcing term in the form [
28,
35]:
where
the diffusion coefficient
with periodic boundary conditions and the initial condition
taken as:
Apply DO method to obtain the evolution operator
in the form:
By substituting with KL expansion of
, we get:
Apply the mean value operator to get:
where
and
are zero mean stochastic processes. Multiplying the evolution Equation (26) by
, we get
Apply the expectation operator to get:
where
and
. After we get
and
, we can apply the matrix form in Equation (25). Then calculate the matrices
and
. Equation (31) is complicated due to the expectation
that contains the third moment of the stochastic basis. A deterministic initial condition makes the stochastic coefficient
be zero initially, and hence the covariance matrix
for
becomes singular. The hybrid PCM-DO method will be used to avoid this issue. For the numerical solution, we shall use the parameters
,
,
, and discretization methods as shown above.
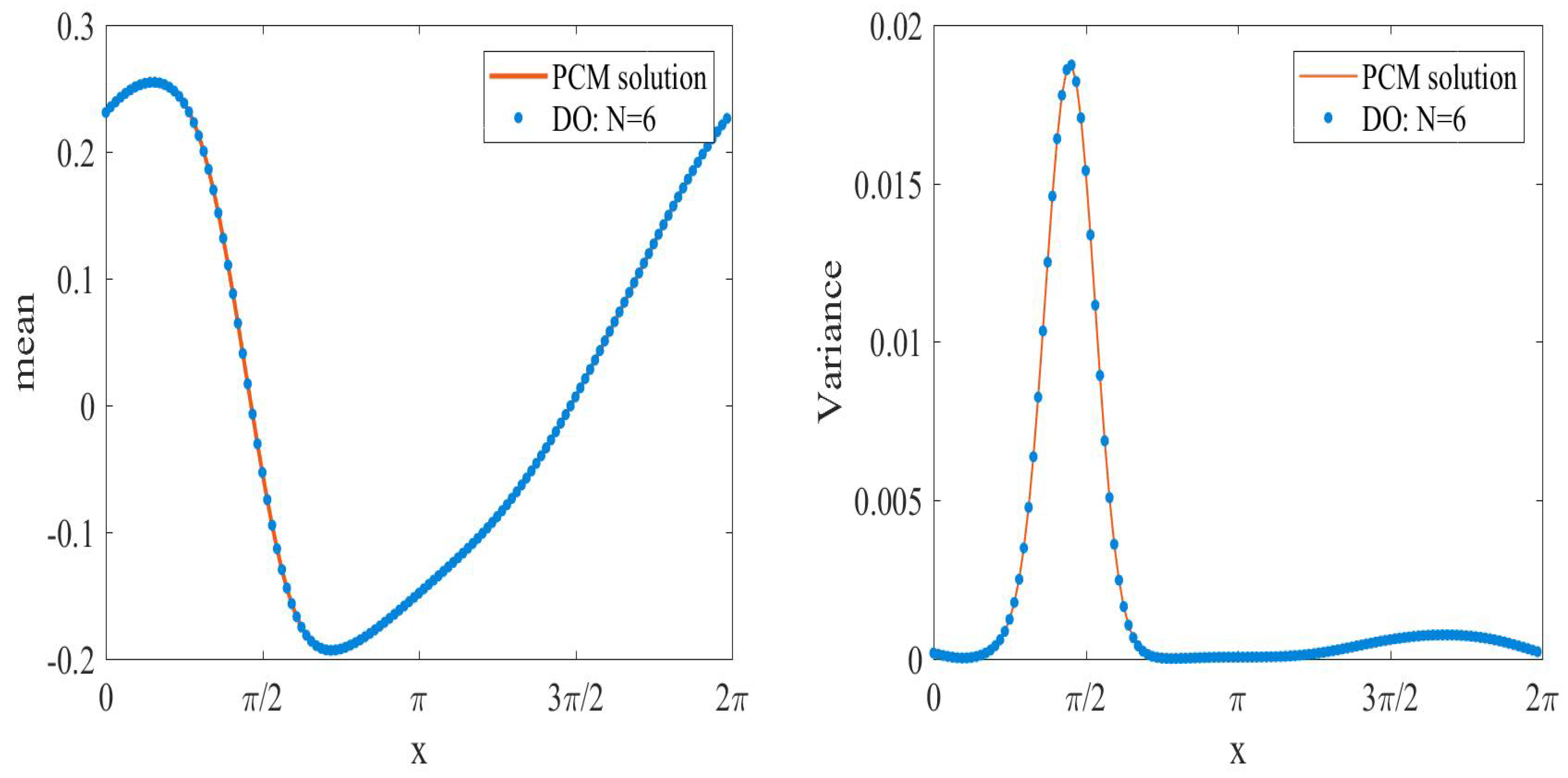
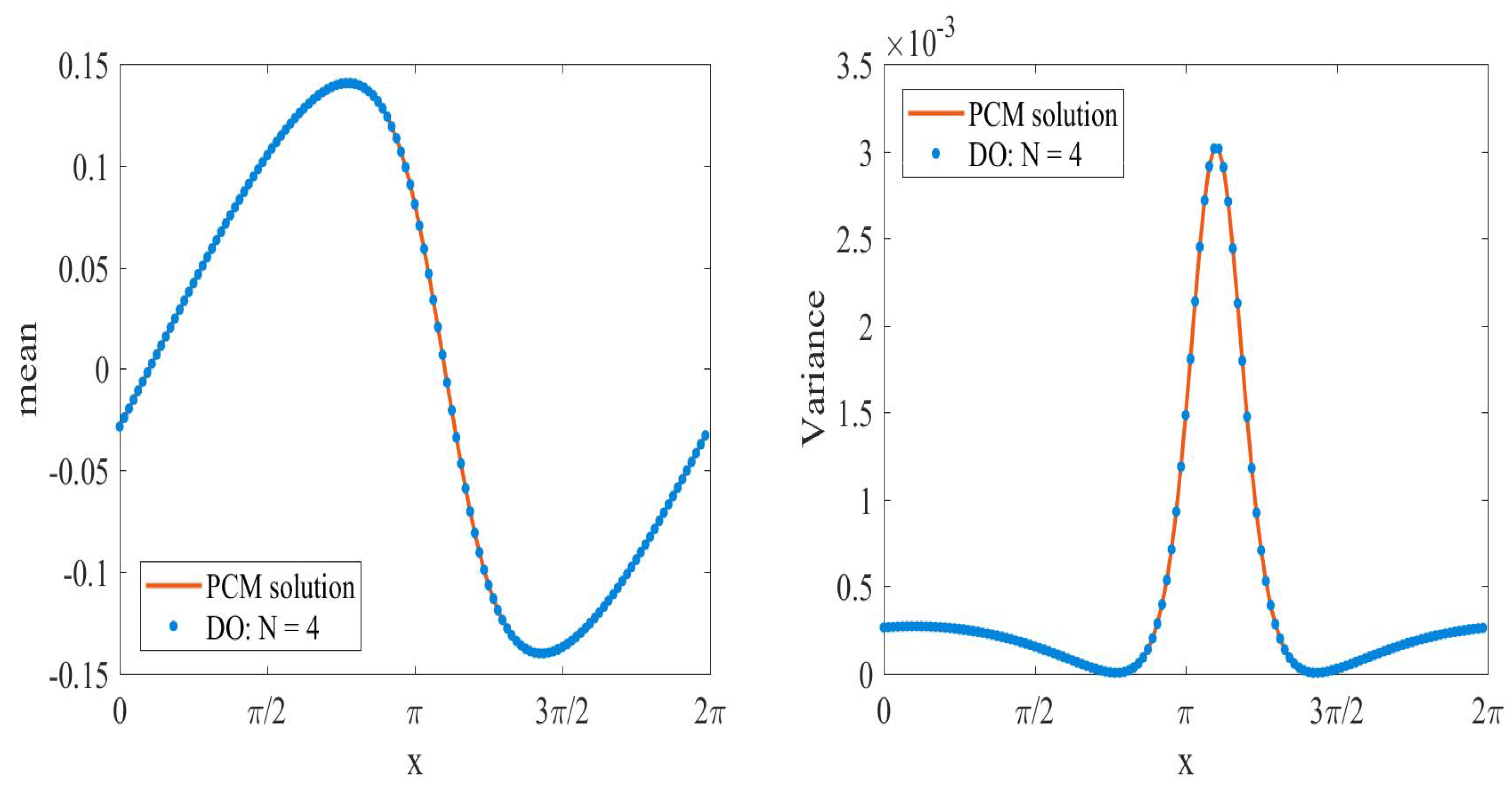
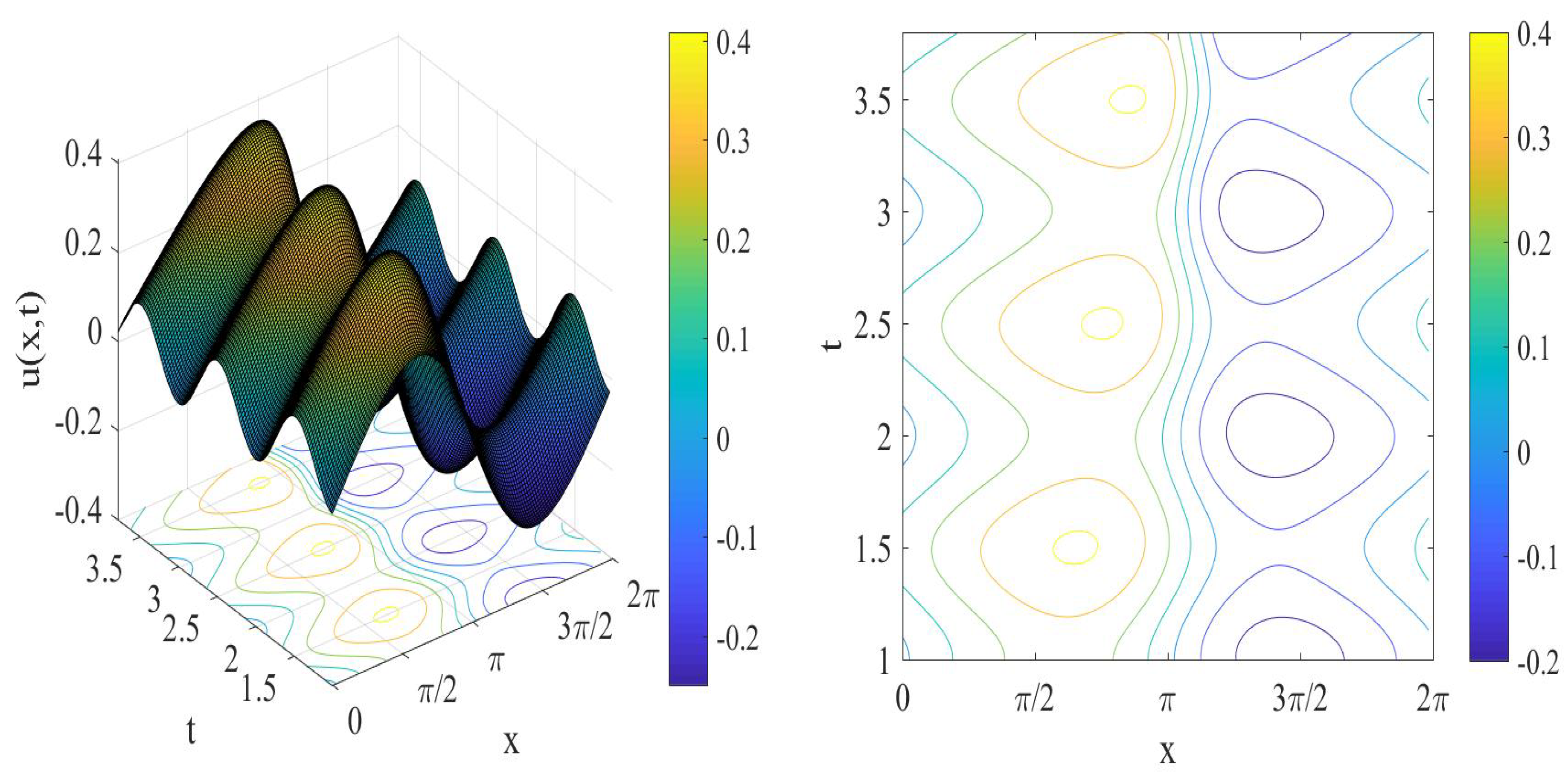
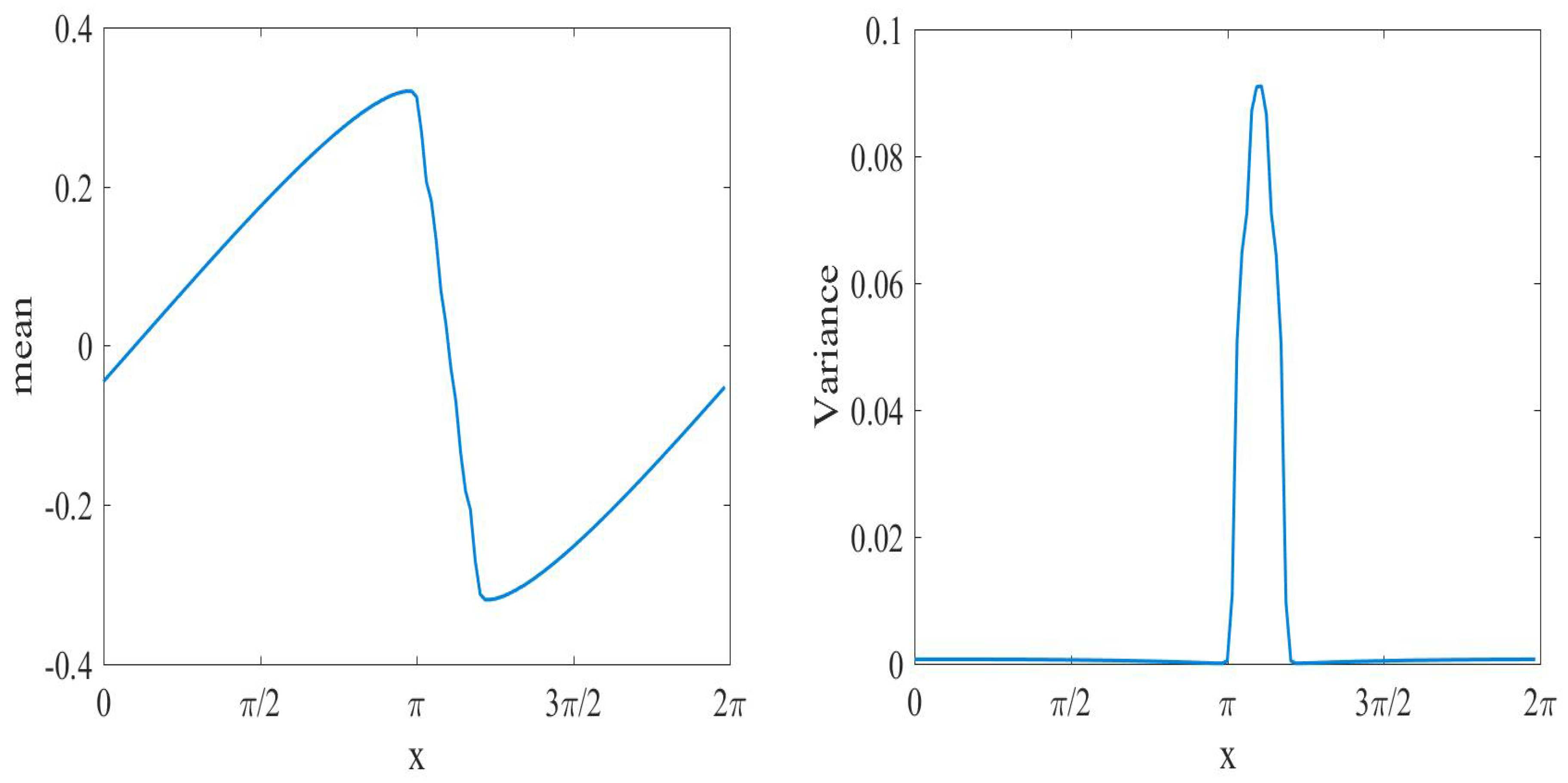
In
Figure 1, the mean and variance are shown at
and
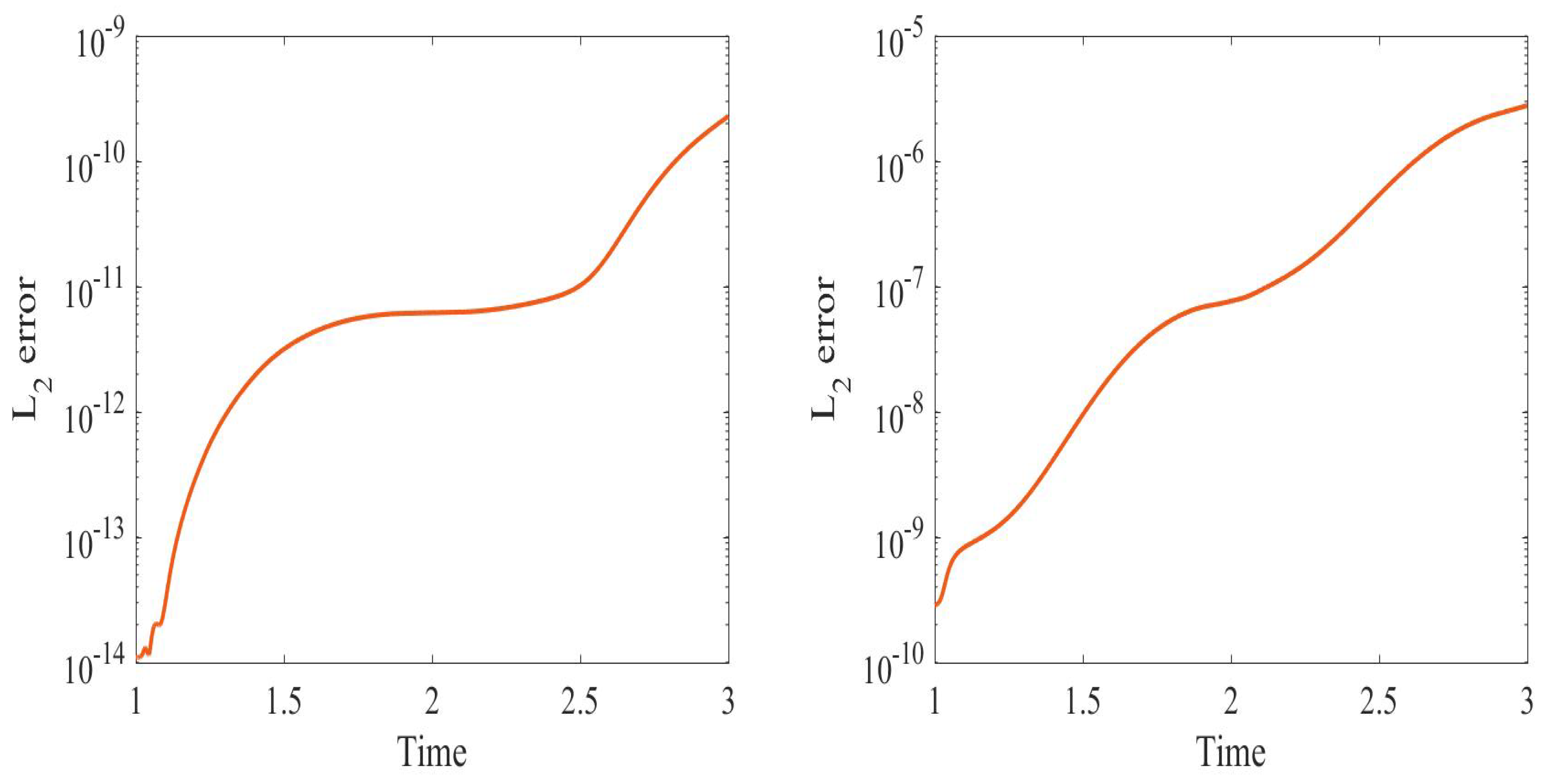
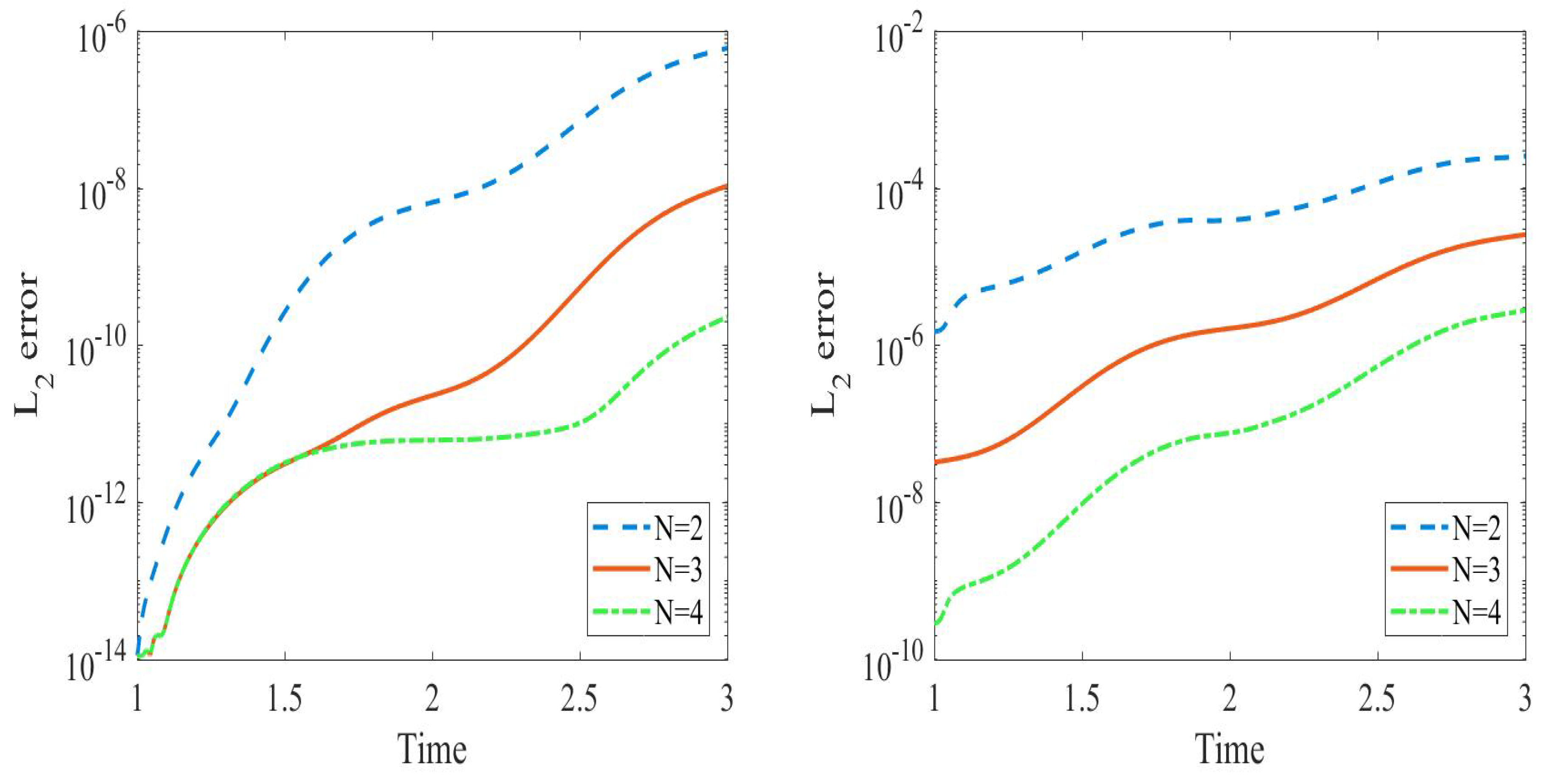
. They agree well with the reference solution. The
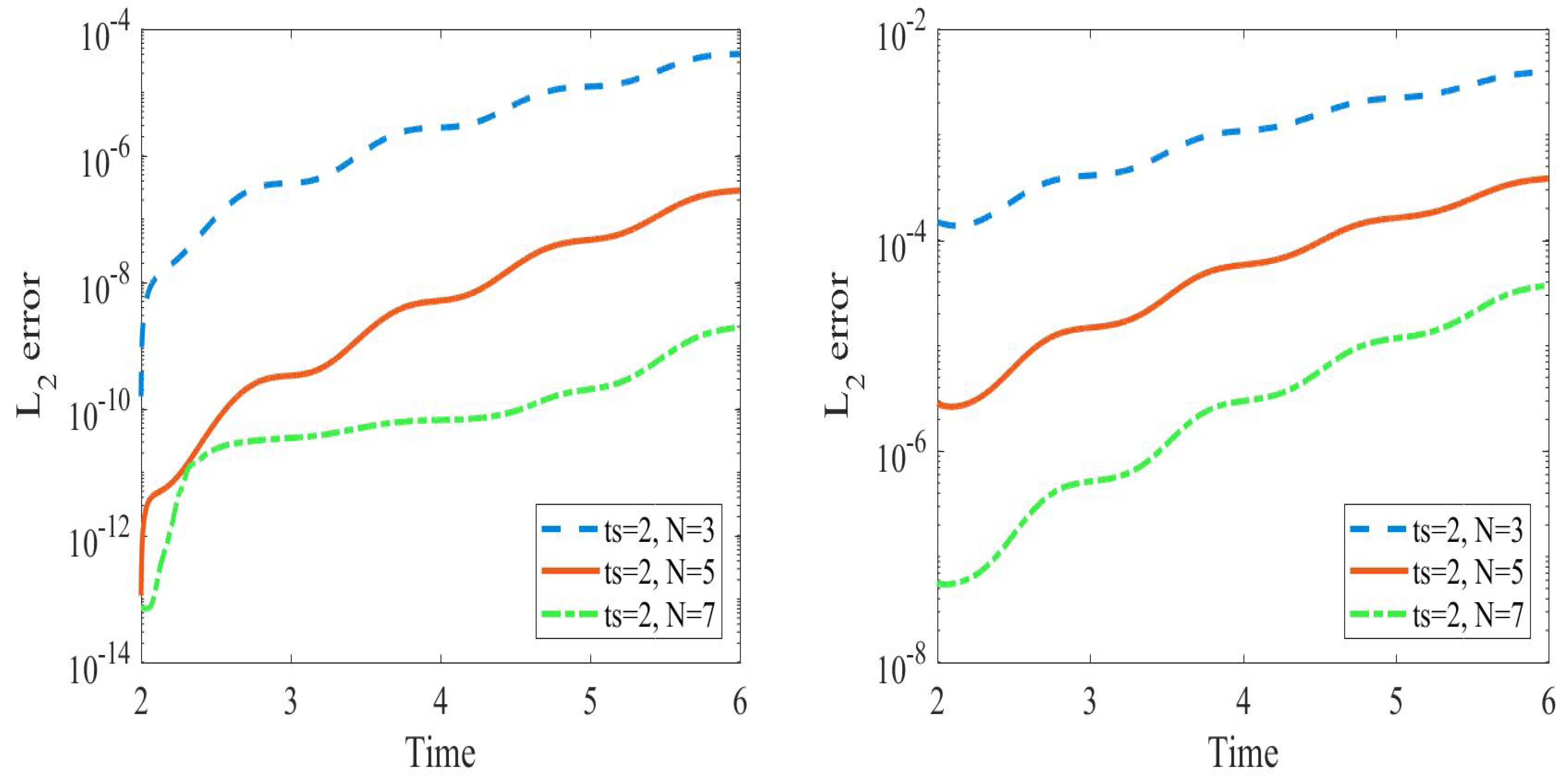
error for the mean and variance for different values of modes are shown in
Figure 2. We present errors in mean and variance for three values of modes:
,
, and
. The solution at
and
is the best among the three cases. To this end, it can be noticed that the accuracy of the solution is affected by lower modes.
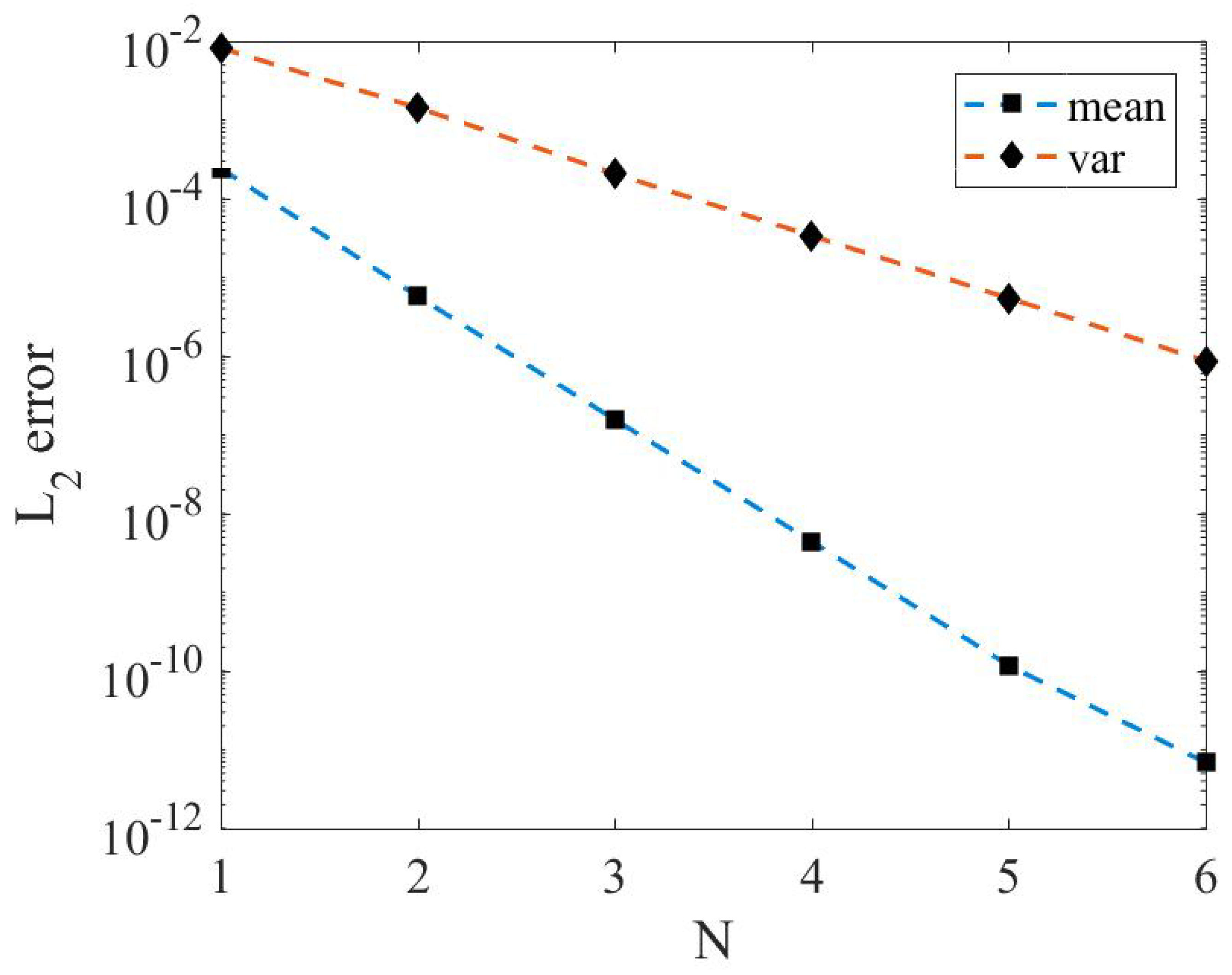
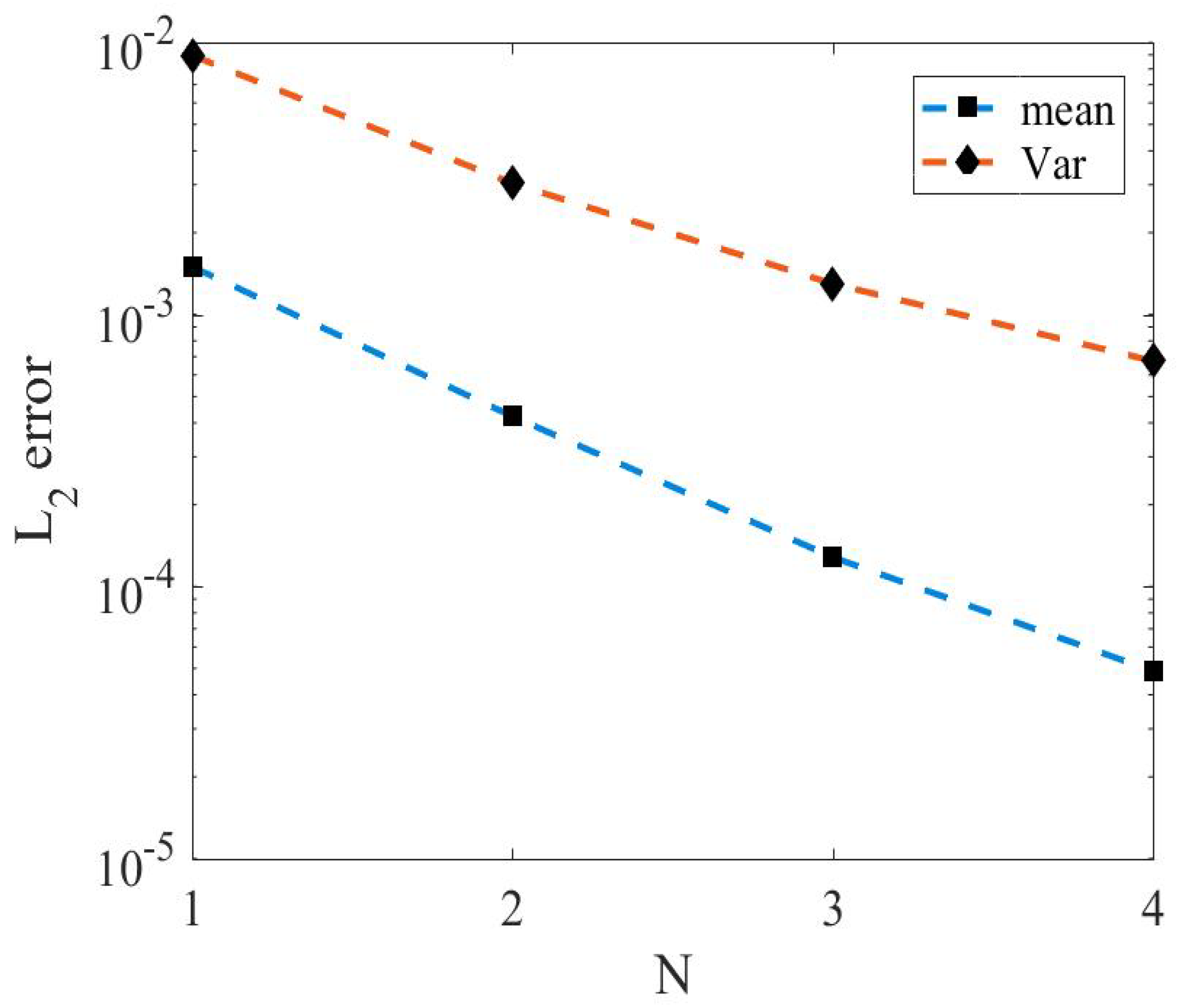
Figure 3 shows the high convergence rate detected with the number of modes. The
error reduces as the number of modes increases. This demonstrates that the DO decomposition has a high convergence rate for this nonlinear case.
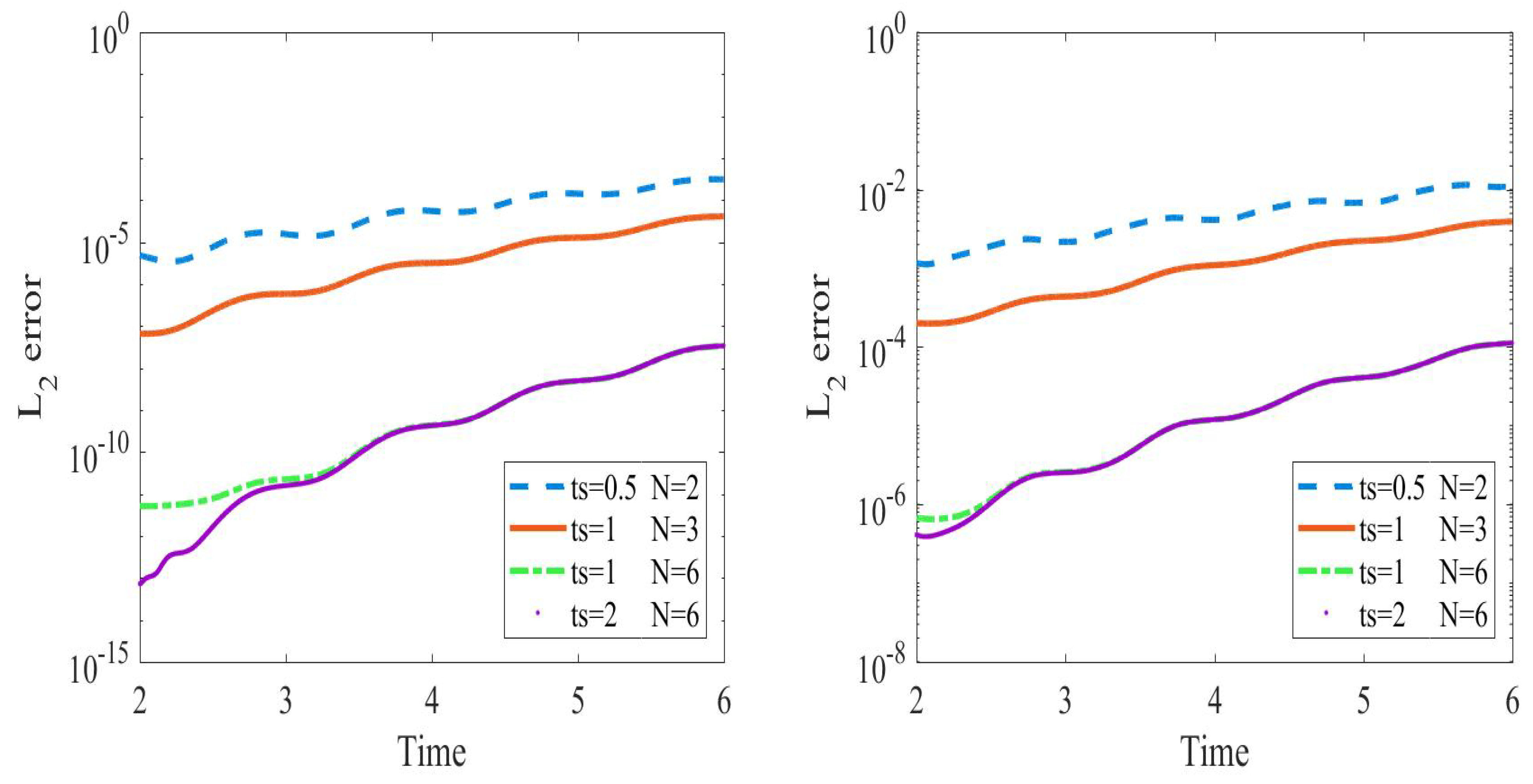
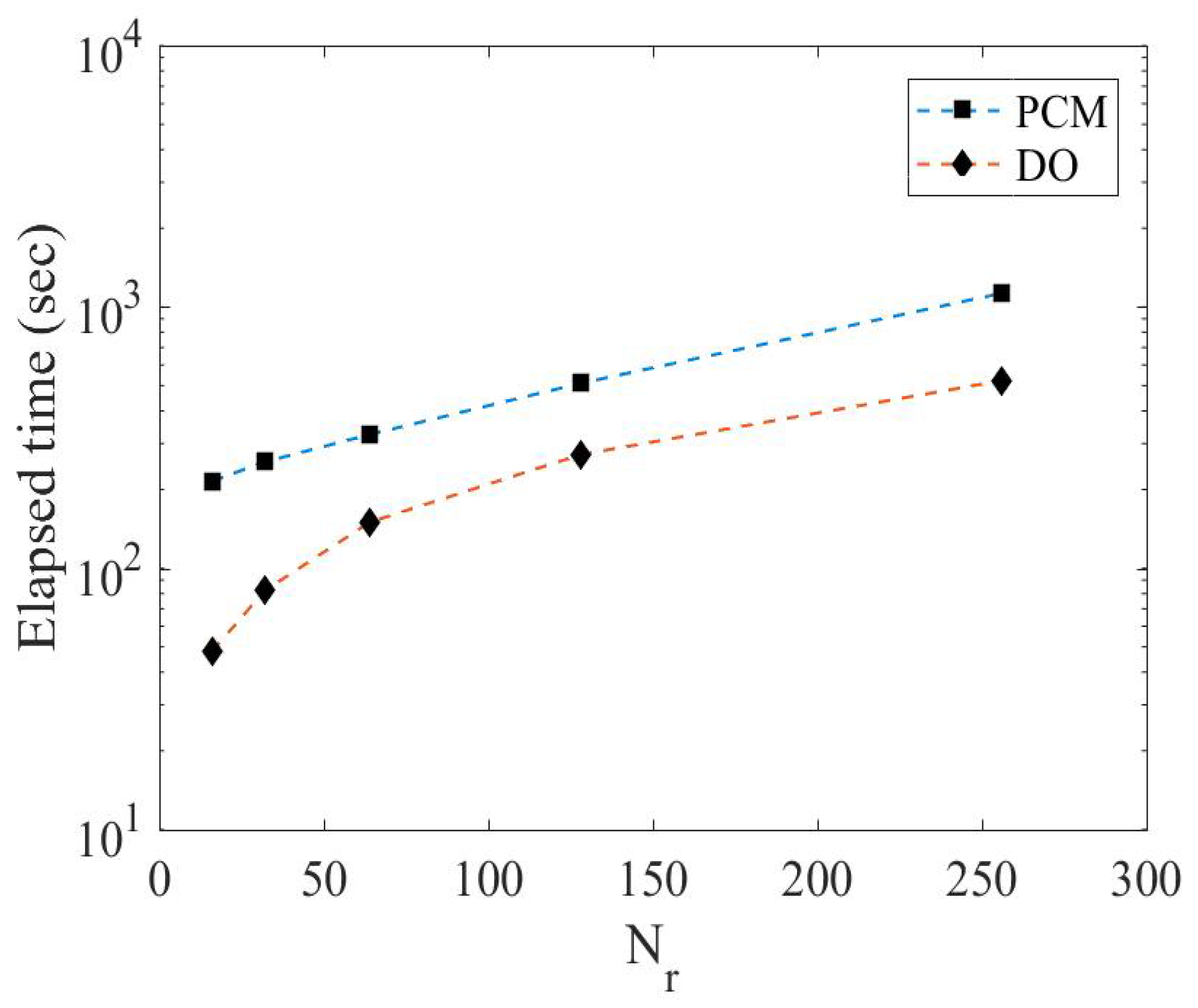
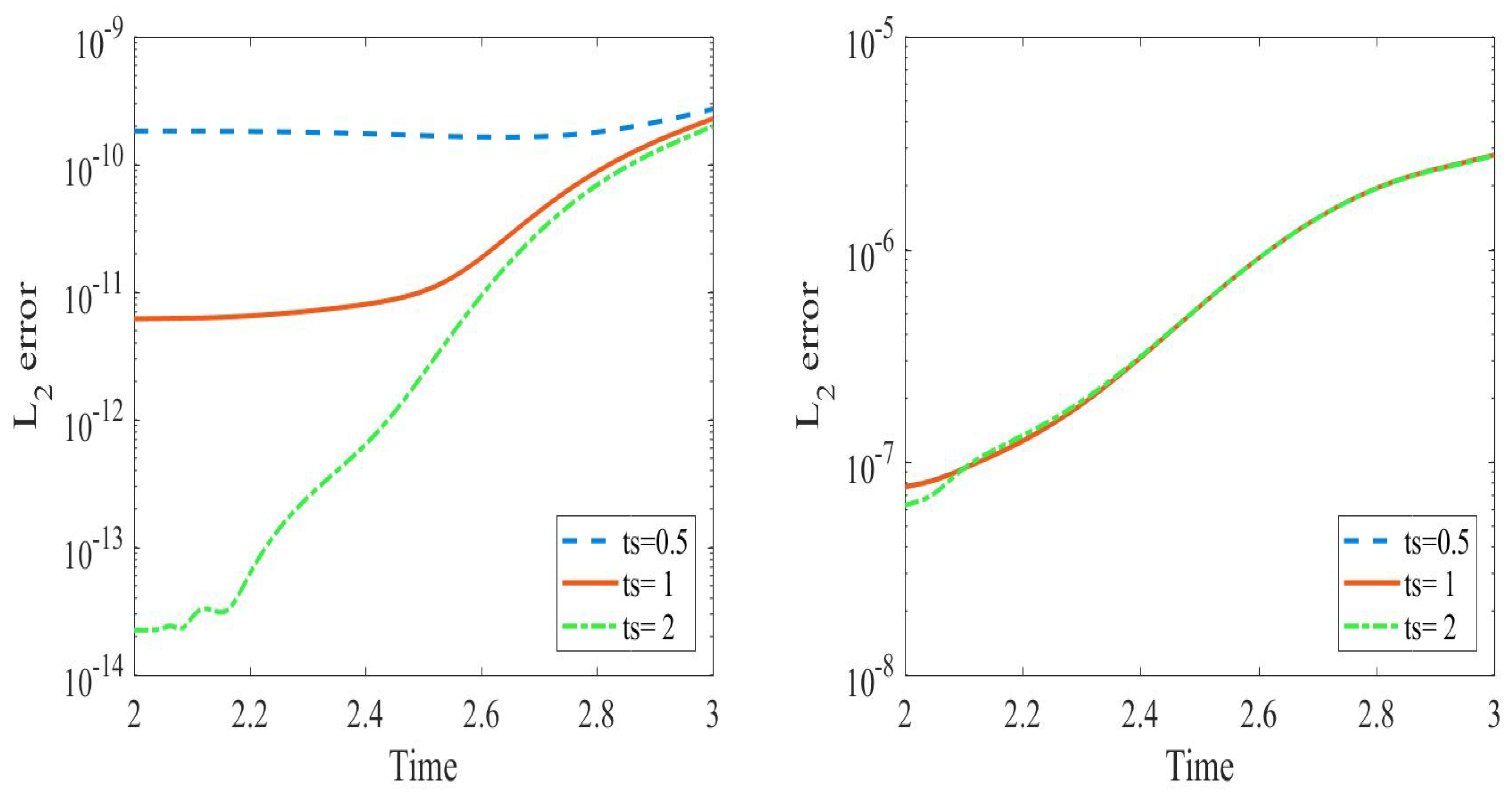
Figure 4 shows that the hybrid approach is affected by the switching time and number of modes. We observe that
error for the mean and variance at
and
is the best among other values. For
and
, the solution has the same accuracy but takes more computational time. The computational time is compared when using the DO and PCM for this test case using different spatial nodes
Nr. The DO is more efficient, with less computational time than the PCM, as shown in
Figure 5.
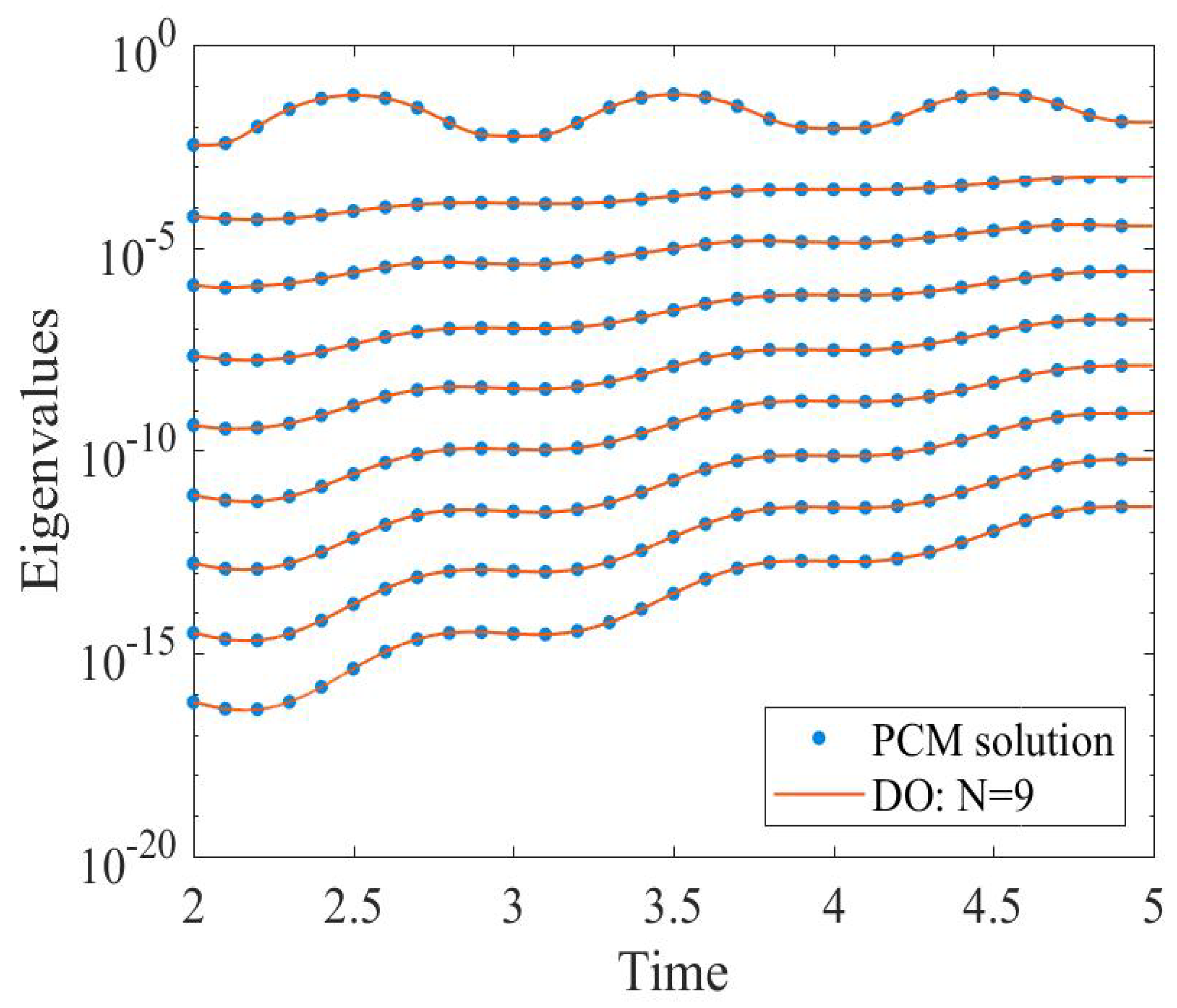
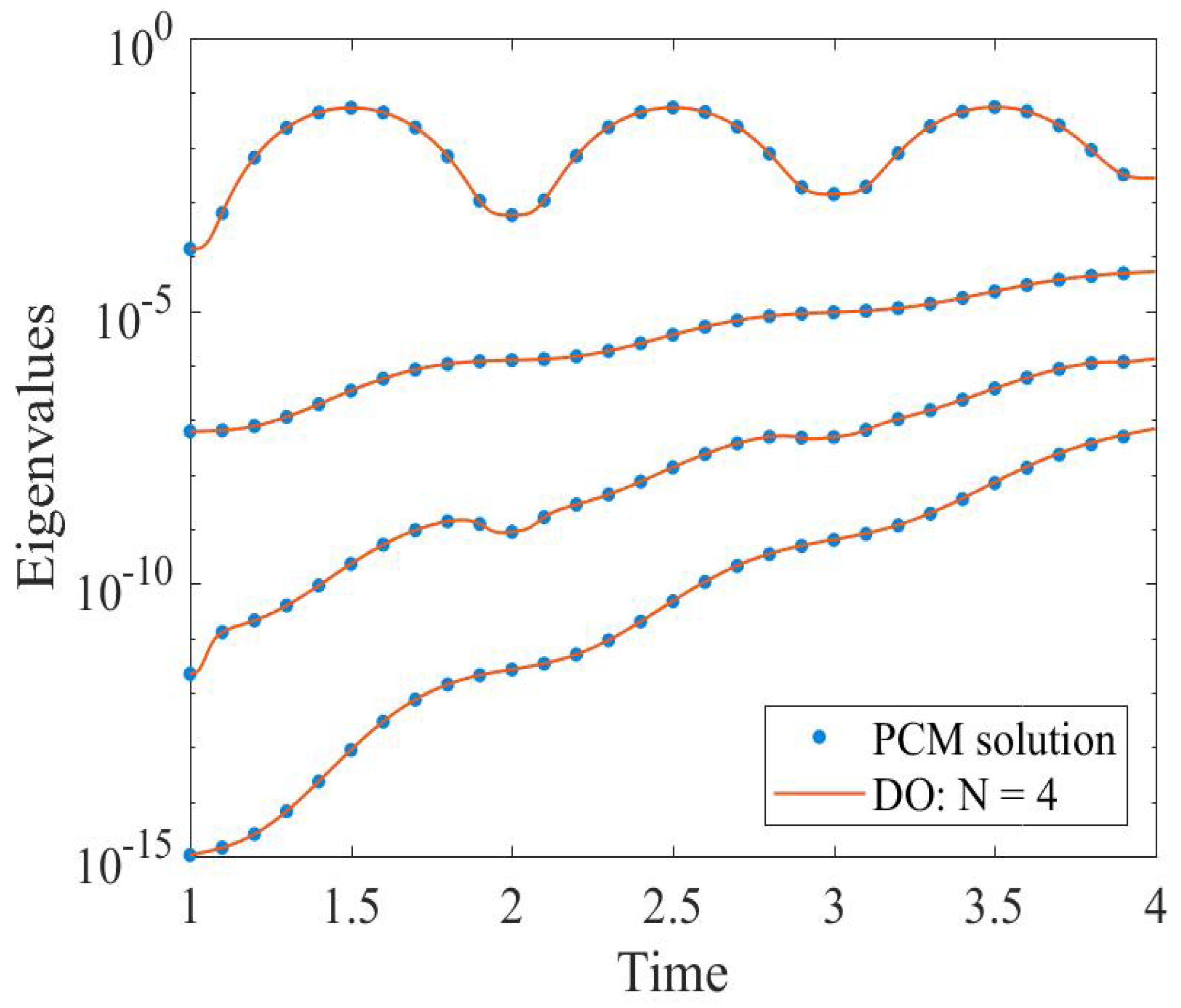
Figure 6 shows the eigenvalues variation as the solution evolves till
. The computed eigenvalues are compared with the reference solution. A good agreement is noticed as shown in the figure. It is observed that the lower eigenvalues
from the mode
have an order:
, respectively, making the covariance matrix extremely ill-conditioned; it becomes singular and hence sensitive to any perturbations.
3.2. Quasilinear Inviscid Burgers’ Equation
Consider the stochastic quasilinear inviscid Burgers’ equation with a random forcing in the form [
36]:
where
with periodic boundary conditions and the initial condition is:
Applying the DO decomposition to get the evolution operator
along with other forms:
where
. We shall use similar parameters as in the above example in
Section 3.1.
Figure 7 demonstrates that errors in the mean and its variance are identical for both the DO and the PCM methods. We present mean and variance at time
as shown in
Figure 8. They have a good agreement compared with the reference solution.
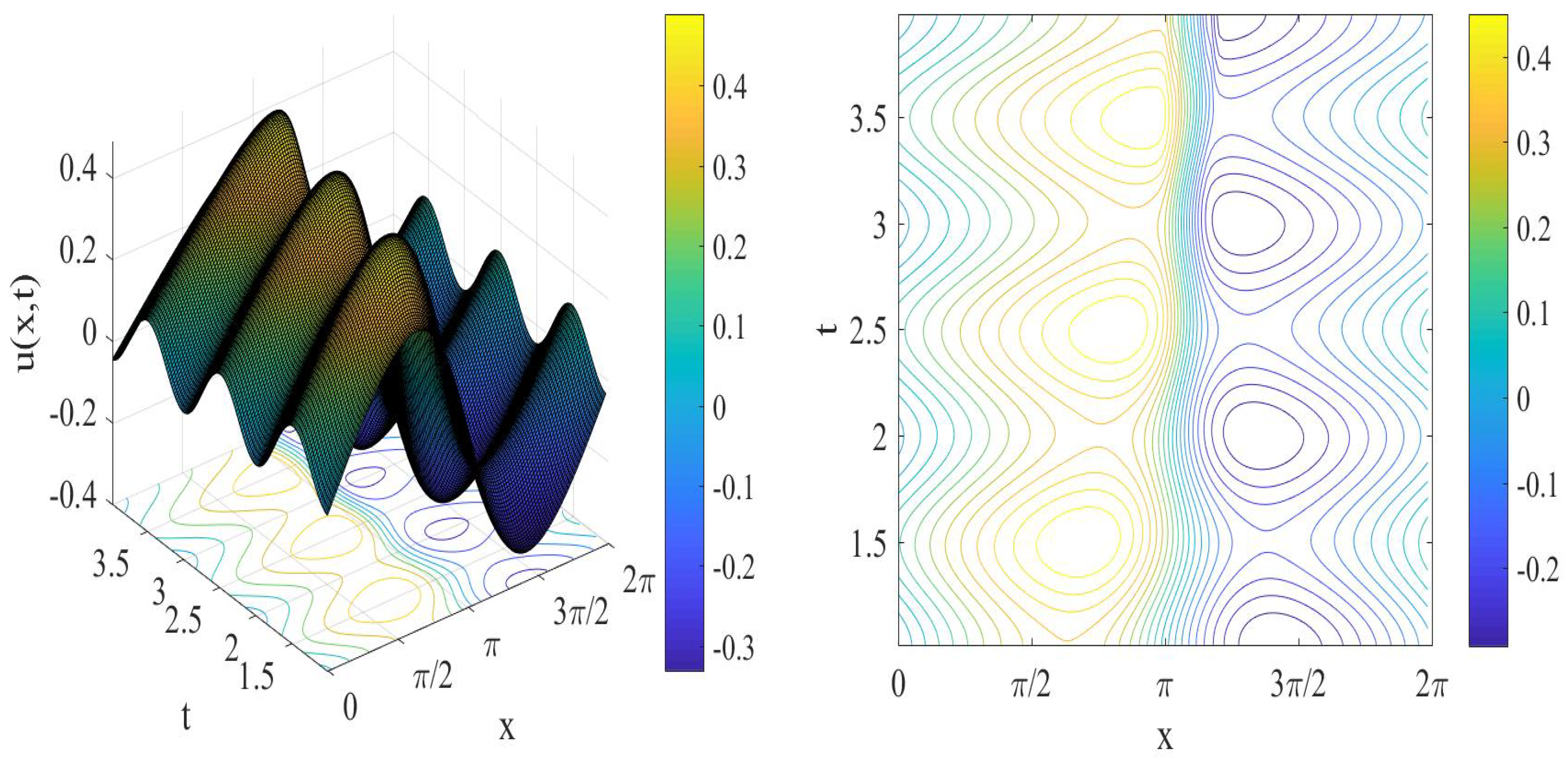
Figure 9 shows the performance of the mean solution
using the DO method as the number of time iterations increases along with the contour lines. The solution is illustrated at
at switching time
and number of modes
with time increment
. We observe that the wave shape tends to be sharper with time. The
error of the DO method for different modes number
are shown in
Figure 10. We present the errors in the variance and mean for three modes
with the same switching time
. As shown, and as expected, the error due to mode
is less than errors due to other modes. Therefore, as the number of modes increases, the error is reduced.
Figure 11 shows the high rate of error convergence with increasing the modes number. This implies that the DO representation is also an efficient choice for this nonlinear SPDE.
As it is shown in
Figure 12, the
error of the solution is computed for three switching times
and
with the same number of modes
. We can observe that the error for the mean at
is better than the errors due to other switching times. After that, the error becomes the same for the three modes. On the other hand, the error in variance is approximately the same for all switching times, so we can use
as it has a smaller computational time.
Figure 13 shows the time growth of eigenvalues till
. The computed eigenvalues are compared with those from the reference solution and a good agreement is achieved. It is observed that the smaller eigenvalues
and
have an order
, respectively. This means the covariance matrix is highly ill-conditioned and becomes singular as the modes number increases.
4. Shock Wave Occurrence
Consider the stochastic inviscid Burger’s equation with random forcing as follows:
where
with periodic boundary conditions and the initial condition to be taken as:
This model is the same model given in (32), but with different initial condition
that allows for shock formation. We consider the solution up to a final time
. The above described DO method in
Section 2 is applied to the model Equation (37). The convective term
should be handled using any suitable technique such as first and/or second-order upwind scheme. This will prevent oscillatory behavior of the solution, especially near the shock wave.
Figure 14 shows the solution mean and variance at the occurrence of the shock wave. The solution is illustrated at switching time
, and the number of modes considered is
. As the waveform steepens, the edges form causing a shock wave. We can notice how variance become relatively large close to the shock wave. The maximum value of variance occurs exactly at the shock wave. The mean field
of the solution is shown in
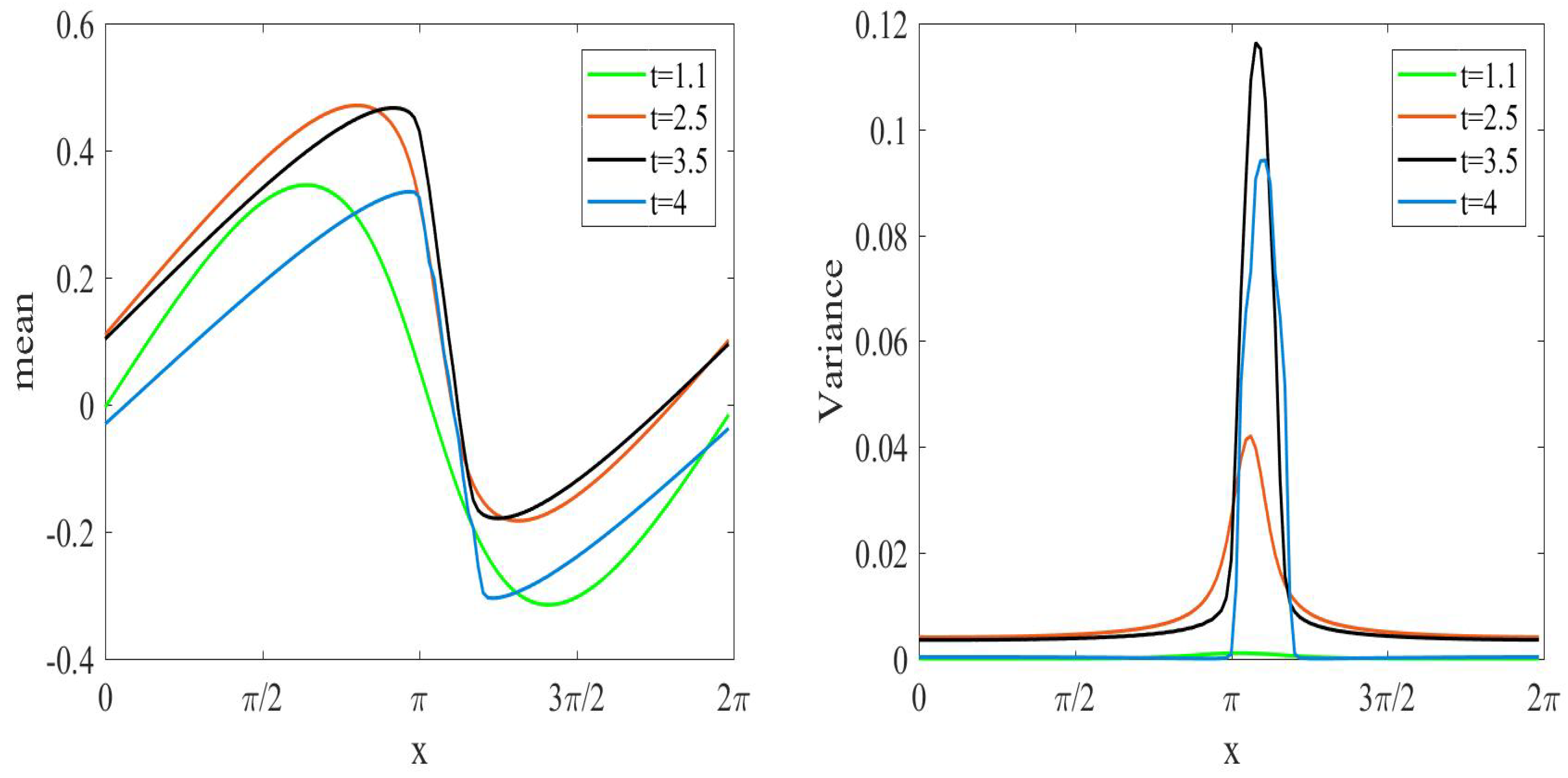
Figure 15. We present the mean field and the contour lines’ evolution up to the breaking time. The sinusoidal wave shape sharpens as the time evolves till the shock wave occurs. The mean and variance for the solution is sketched at different values of time as shown in
Figure 16. Time values
and
are considered in
Figure 16. It can be observed that the sinusoidal wave shape is distorted. The distortion of the wave profile starts from the initial data, and the dispersion of the wave profile evolves with the time increase.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}















