
Generalized Type 2 Fuzzy Differential Evolution Applied to a Sugeno Controller





Abstract
:1. Introduction
2. General Type 2 Fuzzy Sets
3. DE Algorithm
3.1. Population Structure (NP)
3.2. Initialization
3.3. Mutation (F)
3.4. Crossover (CR)
3.5. Selection
| Algorithm 1. DE algorithm. |
| Generate the initial population of individuals Do For each individual j in the population Choose three numbers and that is, 1 ≤ , , ≤ N with ≠ ≠ ≠ Generate a random integer ∈ (1, N) For each parameter i Calculate generation and diversity using Equations (4) and (5) Use a fuzzy system to calculate the new Mutation and Crossover parameters Replace with the child if is better End For Until the termination condition is achieved |
4. Parametric Generalized Type 2 Fuzzy Model
| Algorithm 2. GT2FDE algorithm. |
| Generate the initial population of individuals Do For each individual j in the population Choose three numbers , and that is, 1 ≤ , , ≤ N with ≠ ≠ ≠ Generate a random integer ∈ (1, N) For each parameter Calculate generation using Equations (24) Use a fuzzy system to calculate the new Mutation parameter using Equations (25) Replace with the child if is better End For Until the termination condition is achieved |
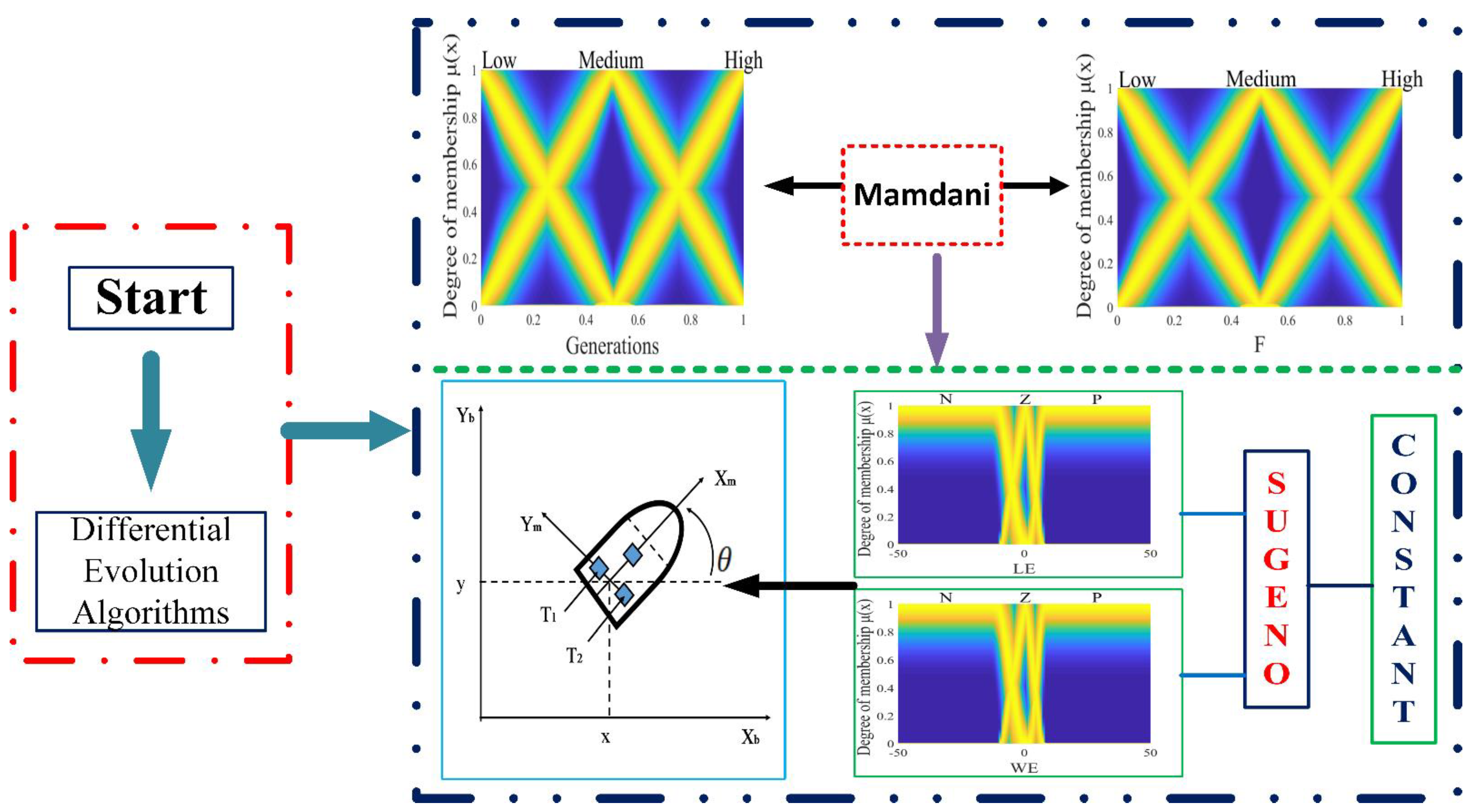
- R1: If generation is low, then F is high;
- R2: If generation is medium, then F is medium;
- R3: If generation is high, then F is low.
5. General Type 2 Fuzzy Controller
- R1: If the LE is N and WE is N, then T1 is −50 and T2 is −50.
- R2: If the LE is N and WE is Z, then T1 is −50 and T2 is 0.
- R3: If the LE is N and WE is P, then T1 is −50 and T2 is 50.
- R4: If the LE is Z and WE is N, then T1 is 0 and T2 is −50.
- R5: If the LE is Z and WE is Z, then T1 is 0 and T2 is 0.
- R6: If the LE is Z and WE is P, then T1 is 0 and T2 is 50.
- R7: If the LE is P and WE is N, then T1 is 50 and T2 is −50.
- R8: If the LE is P and WE is Z, then T1 is 50 and T2 is 0.
- R9: If the LE is P and WE is P, then T1 is 50 and T2 is 50.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sridharan, M. Short review on various applications of fuzzy logic-based expert systems in the field of solar energy. Int. J. Ambient. Energy 2022, 43, 5112–5128. [Google Scholar] [CrossRef]
- Zhao, L.; Yin, Z.; Yu, K.; Tang, X.; Xu, L.; Guo, Z.; Nehra, P. A Fuzzy Logic Based Intelligent Multi-Attribute Routing Scheme for Two-layered SDVNs. IEEE Trans. Netw. Serv. Manag. 2022, 1. [Google Scholar] [CrossRef]
- Hosseinpour, S.; Martynenko, A. Application of fuzzy logic in drying: A review. Dry. Technol. 2022, 40, 797–826. [Google Scholar] [CrossRef]
- Castillo, O.; Castro, J.R.; Melin, P. Type-2 fuzzy logic systems. In Interval Type-3 Fuzzy Systems: Theory and Design; Springer: Cham, Switzerland, 2022; pp. 5–11. [Google Scholar] [CrossRef]
- Castillo, O.; Melin, P. New Perspectives on Hybrid Intelligent System Design based on Fuzzy Logic. Neural Networks and Metaheuristics; Springer Nature: Cham, Switzerland, 2022; Volume 1050. [Google Scholar]
- Kaur, J.; Khehra, B.S.; Singh, A. Significance of Fuzzy Logic in the Medical Science. In Computer Vision and Robotics; Springer: Singapore, 2022; pp. 497–509. [Google Scholar] [CrossRef]
- Quek, S.G.; Selvachandran, G.; Sham, R.; Siau, C.S.; Ramli, M.H.M.; Ahmad, N. A Fuzzy Logic Based Optimal Network System for the Delivery of Medical Goods via Drones and Land Transport in Remote Areas. In International Conference on Intelligent Systems Design and Applications; Springer: Cham, Switzerland, 2022; pp. 1306–1312. [Google Scholar] [CrossRef]
- Qazi, S.; Iqbal, N.; Raza, K. Fuzzy Logic-Based Hybrid Models for Clinical Decision Support Systems in Cancer. In Computational Intelligence in Oncology; Springer: Singapore, 2022; pp. 201–213. [Google Scholar] [CrossRef]
- Eckert, J.J.; Barbosa, T.P.; Silva, F.L.; Roso, V.R.; Silva, L.C.; da Silva, L.A.R. Optimum fuzzy logic controller applied to a hybrid hydraulic vehicle to minimize fuel consumption and emissions. Expert Syst. Appl. 2022, 207, 117903. [Google Scholar] [CrossRef]
- Inozemtsev, A.; Petrochenkov, A.; Kazantsev, V.; Shmidt, I.; Sazhenkov, A.; Dadenkov, D.; Gribkov, I.; Ivanov, P. The Fuzzy Logic in the Problems of Test Control of a Bypass Turbojet Engine Gas Generator. Mathematics 2022, 10, 484. [Google Scholar] [CrossRef]
- Pan, Y.; Wu, Y.; Lam, H.-K. Security-Based Fuzzy Control for Nonlinear Networked Control Systems with DoS Attacks via a Resilient Event-Triggered Scheme. IEEE Trans. Fuzzy Syst. 2022, 30, 4359–4368. [Google Scholar] [CrossRef]
- Miranda, M.H.; Silva, F.L.; Lourenço, M.A.; Eckert, J.J.; Silva, L.C. Electric vehicle powertrain and fuzzy controller optimization using a planar dynamics simulation based on a real-world driving cycle. Energy 2022, 238, 121979. [Google Scholar] [CrossRef]
- Patel, H.R. Fuzzy-based metaheuristic algorithm for optimization of fuzzy controller: Fault-tolerant control application. Int. J. Intell. Comput. Cybern. 2022, 15, 599–624. [Google Scholar] [CrossRef]
- Boudia, A.; Messalti, S.; Harrag, A.; Boukhnifer, M. New hybrid photovoltaic system connected to superconducting magnetic energy storage controlled by PID-fuzzy controller. Energy Convers. Manag. 2021, 244, 114435. [Google Scholar] [CrossRef]
- Yang, T.; Sun, N.; Fang, Y. Adaptive Fuzzy Control for a Class of MIMO Underactuated Systems with Plant Uncertainties and Actuator Deadzones: Design and Experiments. IEEE Trans. Cybern. 2022, 52, 8213–8226. [Google Scholar] [CrossRef]
- Wu, L.; Qian, F.; Wang, L.; Ma, X. An improved type-reduction algorithm for general type-2 fuzzy sets. Inf. Sci. 2022, 593, 99–120. [Google Scholar] [CrossRef]
- Chen, Y. Study on Weighted-Based Discrete Noniterative Algorithms for Computing the Centroids of General Type-2 Fuzzy Sets. Int. J. Fuzzy Syst. 2022, 24, 587–606. [Google Scholar] [CrossRef]
- Chen, Y.; Li, C.; Yang, J. Design of Discrete Noniterative Algorithms for Center-of-Sets Type Reduction of General Type-2 Fuzzy Logic Systems. Int. J. Fuzzy Syst. 2022, 24, 2024–2035. [Google Scholar] [CrossRef]
- Shi, J. A unified general type-2 fuzzy PID controller and its comparative with type-1 and interval type-2 fuzzy PID controller. Asian J. Control. 2022, 24, 1808–1824. [Google Scholar] [CrossRef]
- Cuevas, F.; Castillo, O.; Cortés-Antonio, P. Generalized Type-2 Fuzzy Parameter Adaptation in the Marine Predator Algorithm for Fuzzy Controller Parameterization in Mobile Robots. Symmetry 2022, 14, 859. [Google Scholar] [CrossRef]
- Carvajal, O.; Melin, P.; Miramontes, I. Optimal Design and Internet of Things Implementation of a General Type-2 Classifier for Blood Pressure Levels. In International Conference on Intelligent and Fuzzy Systems; Springer: Cham, Switzerland, 2022; pp. 722–729. [Google Scholar] [CrossRef]
- Ontiveros-Robles, E.; Castillo, O.; Melin, P. Towards asymmetric uncertainty modeling in designing General Type-2 Fuzzy classifiers for medical diagnosis. Expert Syst. Appl. 2021, 183, 115370. [Google Scholar] [CrossRef]
- Ochoa, P.; Castillo, O.; Melin, P.; Soria, J. Differential Evolution with Shadowed and General Type-2 Fuzzy Systems for Dynamic Parameter Adaptation in Optimal Design of Fuzzy Controllers. Axioms 2021, 10, 194. [Google Scholar] [CrossRef]
- Mendel, J.M. General type-2 fuzzy logic systems made simple: A tutorial. IEEE Trans. Fuzzy Syst. 2014, 22, 1162–1182. [Google Scholar] [CrossRef]
- Price, K.V.; Storn, R.M.; Lampinen, J.A. The differential evolution algorithm. In Differential Evolution: A Practical Approach to Global Optimization; Springer: Cham, Switzerland, 2005; pp. 37–134. [Google Scholar]
- Song, Y.; Cai, X.; Zhou, X.; Zhang, B.; Chen, H.; Li, Y.; Deng, W.; Deng, W. Dynamic hybrid mechanism-based differential evolution algorithm and its application. Expert Syst. Appl. 2023, 213, 118834. [Google Scholar] [CrossRef]
- Abdelkader, E.M.; Moselhi, O.; Marzouk, M.; Zayed, T. An exponential chaotic differential evolution algorithm for optimizing bridge maintenance plans. Autom. Constr. 2022, 134, 104107. [Google Scholar] [CrossRef]
- Deng, W.; Ni, H.; Liu, Y.; Chen, H.; Zhao, H. An adaptive differential evolution algorithm based on belief space and generalized opposition-based learning for resource allocation. Appl. Soft Comput. 2022, 127, 109419. [Google Scholar] [CrossRef]
- Akhtar, M.; Manna, A.K.; Duary, A.; Bhunia, A.K. A hybrid tournament differential evolution algorithm for solving op-timisation problems and applications. Int. J. Oper. Res. 2022, 45, 300–343. [Google Scholar] [CrossRef]
- Kharchouf, Y.; Herbazi, R.; Chahboun, A. Parameter’s extraction of solar photovoltaic models using an improved differential evolution algorithm. Energy Convers. Manag. 2021, 251, 114972. [Google Scholar] [CrossRef]
- Zeng, Z.; Zhang, M.; Zhang, H.; Hong, Z. Improved differential evolution algorithm based on the sawtooth-linear population size adaptive method. Inf. Sci. 2022, 608, 1045–1071. [Google Scholar] [CrossRef]
- De Athayde Prata, B.; Rodrigues, C.D.; Framinan, J.M. A differential evolution algorithm for the customer order scheduling problem with sequence-dependent setup times. Expert Syst. Appl. 2022, 189, 116097. [Google Scholar] [CrossRef]
- Castillo, O.; Valdez, F.; Soria, J.; Yoon, J.H.; Geem, Z.W.; Peraza, C.; Ochoa, P.; Amador-Angulo, L. Optimal Design of Fuzzy Systems Using Differential Evolution and Harmony Search Algorithms with Dynamic Parameter Adaptation. Appl. Sci. 2020, 10, 6146. [Google Scholar] [CrossRef]
- Ochoa, P.; Castillo, O.; Soria, J. Differential evolution algorithm using a dynamic crossover parameter with fuzzy logic applied for the CEC 2015 benchmark functions. In North American Fuzzy Information Processing Society Annual Conference; Springer: Cham, Switzerland, 2018; pp. 580–591. [Google Scholar] [CrossRef]
- Ochoa, P.; Castillo, O.; Soria, J. Interval type-2 fuzzy logic dynamic mutation and crossover parameter adaptation in a fuzzy differential evolution method. In Intuitionistic Fuzziness and Other Intelligent Theories and Their Applications; Springer: Cham, Switzerland, 2018; pp. 81–94. [Google Scholar] [CrossRef]
- Ochoa, P.; Castillo, O.; Soria, J. Differential Evolution Using Fuzzy Logic and a Comparative Study with Other Metaheuristics. In Nature-Inspired Design of Hybrid Intelligent Systems; Springer: Cham, Switzerland, 2017; pp. 257–268. [Google Scholar] [CrossRef]
- Peraza, C.; Ochoa, P.; Castillo, O.; Geem, Z.W. Interval-Type 3 Fuzzy Differential Evolution for Designing an Interval-Type 3 Fuzzy Controller of a Unicycle Mobile Robot. Mathematics 2022, 10, 3533. [Google Scholar] [CrossRef]
- Fukao, T.; Nakagawa, H.; Adachi, N. Adaptive tracking control of a nonholonomic mobile robot. IEEE Trans. Robot. Autom. 2000, 16, 609–615. [Google Scholar] [CrossRef]
- Martinez, R.; Rodriguez, A.; Castillo, O.; Melin, P.; Aguilar, L.T. Optimization of type-2 fuzzy logic con-trollers for mobile robots using evolutionary methods. In Proceedings of the 2009 IEEE International Conference on Systems, Man and Cybernetics, San Antonio, TX, USA, 11–14 October 2009; pp. 4764–4769. [Google Scholar]
- Melin, P.; Urias, J.; Solano, D.; Soto, M.; Lopez, M.; Oscar Castillo, O. Voice Recognition with Neural Networks, Type-2 Fuzzy Logic and Genetic Algorithms. Eng. Lett. 2006, 13, 108–116. [Google Scholar]
- Castillo, O.; Castro, J.R.; Melin, P. Interval Type-3 Fuzzy Control for Automated Tuning of Image Quality in Televisions. Axioms 2022, 11, 276. [Google Scholar] [CrossRef]
- Castillo, O.; Castro, J.R.; Melin, P. Interval Type-3 Fuzzy Systems: Theory and Design. Stud. Fuzziness Soft Comput. 2022, 418, 1–100. [Google Scholar]
- Mohammadzadeh, A.; Castillo, O.; Band, S.S.; Mosavi, A. A Novel Fractional-Order Multiple-Model Type-3 Fuzzy Control for Nonlinear Systems with Unmodeled Dynamics. Int. J. Fuzzy Syst. 2021, 23, 1633–1651. [Google Scholar] [CrossRef]
- Castillo, O.; Melin, P. Towards Interval Type-3 Intuitionistic Fuzzy Sets and Systems. Mathematics 2022, 10, 4091. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Linguistic Variable | Equation |
|---|---|
| Low | and , where + , where |
| Medium | and , where + , where |
| High | and , where + , where |
| LE | ||||||||||
| GT2MF | ||||||||||
| N | −50 | −50 | −15 | −5 | −50 | −50 | −5 | 3 | 0.7 | 1 |
| Z | −10 | −2 | 6 | – | −8 | 3 | 8 | – | – | 2 |
| P | 0 | 5 | 50 | 50 | 5 | 10 | 50 | 50 | 0.7 | 1 |
| WE | ||||||||||
| GT2MF | ||||||||||
| N | −50 | −50 | −15 | −5 | −50 | −50 | −5 | 3 | 0.7 | 1 |
| Z | −10 | −2 | 6 | – | −8 | 3 | 8 | – | – | 2 |
| P | 0 | 5 | 50 | 50 | 5 | 10 | 50 | 50 | 0.7 | 1 |
| Disturbance Number | Type of Disturbance | Configuration of the Parameters |
|---|---|---|
| 1 | Uniform random number | 0.05 |
| 2 | Band-limited white | 0.1 |
| 3 | Pulse-generated | 1, 1, 5, and 0 |
| Performance Index | LE DE | WE DE | LE GT2FC | WE GT2FC |
|---|---|---|---|---|
| ITAE | ||||
| ITSE | ||||
| IAE | ||||
| ISE | ||||
| RMSE | ||||
| MSE | ||||
| Execution time | 12,227.514 s | 12,592.143 s | ||
| 1 | 2 | 3 | ||||
|---|---|---|---|---|---|---|
| Performance Index | LE GT2FC | WE GT2FC | LE GT2FC | WE GT2FC | LE GT2FC | WE GT2FC |
| ITAE | ||||||
| ITSE | ||||||
| IAE | ||||||
| ISE | ||||||
| RMSE | ||||||
| MSE | ||||||
| Execution time | 23,134.33 s | 36,826.203 s | 7067.877 s | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ochoa, P.; Peraza, C.; Castillo, O.; Melin, P. Generalized Type 2 Fuzzy Differential Evolution Applied to a Sugeno Controller. Axioms 2023, 12, 156. https://doi.org/10.3390/axioms12020156
Ochoa P, Peraza C, Castillo O, Melin P. Generalized Type 2 Fuzzy Differential Evolution Applied to a Sugeno Controller. Axioms. 2023; 12(2):156. https://doi.org/10.3390/axioms12020156
Chicago/Turabian StyleOchoa, Patricia, Cinthia Peraza, Oscar Castillo, and Patricia Melin. 2023. "Generalized Type 2 Fuzzy Differential Evolution Applied to a Sugeno Controller" Axioms 12, no. 2: 156. https://doi.org/10.3390/axioms12020156
APA StyleOchoa, P., Peraza, C., Castillo, O., & Melin, P. (2023). Generalized Type 2 Fuzzy Differential Evolution Applied to a Sugeno Controller. Axioms, 12(2), 156. https://doi.org/10.3390/axioms12020156