1. Introduction
Many problems in mathematics and other fields of science may be modeled into an equation with a suitable operator. Therefore, it is self-evident that the existence of a solution to such issues is equivalent to finding the fixed points (FPs) of the aforementioned operators.
FP techniques are applied in many solid applications due to their ease and smoothness; these include optimization theory, approximation theory, fractional derivatives, dynamic theory, and game theory. This is the reason why researchers are attracted to this technique. Also, this technique plays a significant role not only in the above applications, but also in nonlinear analysis and many other engineering sciences. One of the important trends in FP methods is the study of the behavior and performance of algorithms that contribute greatly to real-world applications; see [
1,
2,
3,
4,
5,
6] for more details.
Throughout this paper, we assume that is a Banach space (BS); is a nonempty, closed, and convex subset (CCS) of an ; ; and is the set of natural numbers. Further, ⇀ and ⟶ stand for weak and strong convergence, respectively.
Suppose that refers to the class of all FPs of the operator , which is described as an element such that an equation is true.
In [
7], a new class of contractive mappings was introduced by Berinde as follows:
where
, and
The mapping
ℑ is called an almost contraction mapping (ACM, for short).
The same author showed that the contractive condition (
1) is more general than the contractive condition of Zamfirescu in [
8].
In 2003, the ACM (
1) was generalized by Imoru and Olantiwo [
9] by replacing the constant
with a strictly increasing continuous function
so that
as follows:
where
and
ℑ here is called a contractive-like mapping. Clearly, (
2) generalizes the mapping classes taken into account by Berinde [
7] and Osilike et al. [
10].
Many authors tended to create many iterative methods for approximating FPs in terms of improving the performance and convergence behavior of algorithms for nonexpansive mappings. Over the past 20 years, a wide range of iterative techniques have been created and researched in order to approximate the FPs of various kinds of operators.
In the literature, the following are some common iterative techniques: Mann [
11], Ishikawa [
12], Noor [
13], Argawal et al. [
14], Abbas and Nazir [
15], and HR [
16,
17].
Let
and
be sequences in
Consider the following iterations:
The above procedures are known as the
S algorithm [
14], Picard-
S algorithm [
18], Thakur algorithm [
19], and
algorithm [
20], respectively.
For contractive-like mappings, it is verified that technique (
6) converges more quickly than both Karakaya et al. [
21], (
3)–(
5) analytically and numerically.
On the other hand, nonlinear integral equations (NIEs) are used to describe mathematical models arising from mathematical physics, engineering, economics, biology, etc. [
22]. In particular, spatial and temporal epidemic modeling challenges and boundary value problems lead to NIEs. Many academics have recently turned to iterative approaches to solve NIEs; for examples, see [
23,
24,
25,
26,
27].
The choice of one iterative method over another is influenced by a few key elements, including speed, stability, and dependence. In recent years, academics have become increasingly interested in iterative algorithms with FPs that depend on data; for further information, see [
28,
29,
30,
31].
Inspired by the above work, in this paper, we develop a new faster iterative scheme as follows:
where
and
are sequences in
The rest of the paper is arranged as follows: An analytical analysis of the performance and convergence rate of our approaches is presented in
Section 3. We observed that the convergence rate is acceptable for ACMs in a BS. Also,
Section 4 covers the weak and strong convergence of the suggested technique for SGNMs in the context of uniformly convex Banach spaces (UCBSs, for short). Moreover, in
Section 5, we discuss the stability results of our iterative approach. In addition, some numerical examples are involved in
Section 6 to study the efficacy and effectiveness of the proposed method. Ultimately, in
Section 7, the solution to a nonlinear Volterra integral problem is presented using the method under consideration.
4. Convergence Results
In this section, we obtain some convergence results for our iteration scheme (
7) using SGNMs in the setting of UCBSs. We begin with the following lemmas:
Lemma 6. Assume that Θ
is a nonempty CCS of a BS Ω
and is a SGNM with Suppose that the sequence would be proposed by (7), then, exists for each Proof. For
assume that
. From Proposition 1
, one has
From (
7) and (
17), we can write
Analogously, by (
7) and (
18), we obtain that
Finally, it follows from (
7) and (
19) that
which implies that
is bounded and nondecreasing sequence. Therefore
exists for each
□
Lemma 7. Let Θ
be a nonempty CCS of a UCBS Ω
and be a SGNM. If the sequence would be considered by (7), then if and only if is bounded and Proof. Let
and
Thank to Lemma 6,
is bounded and
exists. Set
From (
20) in (
17) and taking
one has
Based on Proposition 1
we get
From (
7) and (
17)–(
19), we have
As
from (
22), we have
which leads to
Applying (
20), we get
Applying (
21) and (
23), we have
It follows from (
20), (
21) and (
24) and Lemma 5 that
is bounded and
Otherwise, let
is bounded and
Also, consider
; then, according to Definition 4, one has
which implies that
As
is uniformly convex and
has exactly one point, then we have
□
Theorem 3. Let be a sequence iterated by (7) and let Θ
and ℑ be defined as in Lemma 7. Then provided that Λ
fulfills Opial’s condition and . Proof. Assume that ; thanks to Lemma 6, exists.
Next, we show that has a weak sequential limit in In this regard, consider with and for all From Lemma 7, one gets Using Lemma 1 and since is demiclosed at 0, one has which implies that Similarly
Now, if
then by Opial’s condition, we get
which is a contradiction, hence
and
□
Theorem 4. Let be a sequence iterated by (7). Also, let Θ
be a nonempty CCS of a UCBS Ω
and be a SGNM. Then Proof. Thank to Lemmas 2 and 7,
and
Since
is compact, then there exists a subsequence
so that
for any
Clearly,
Letting we get i.e., From Lemma 6, we conclude that exists for each hence □
Theorem 5. Let be a sequence iterated by (7) and let Θ
and ℑ be defined as in Lemma 7. Then if and only if where Proof. It is clear that the necessary condition is fulfilled. Consider Using Lemma 6, one can see that exists for each which leads to the finding that exists. Hence,
Now, we claim that
is a Cauchy sequence in
Since
for every
there exists
so that
Thus is a Cauchy sequence in The closeness of implies that there exists such that As then Therefore, and this completes the proof. □
6. Numerical Experiments
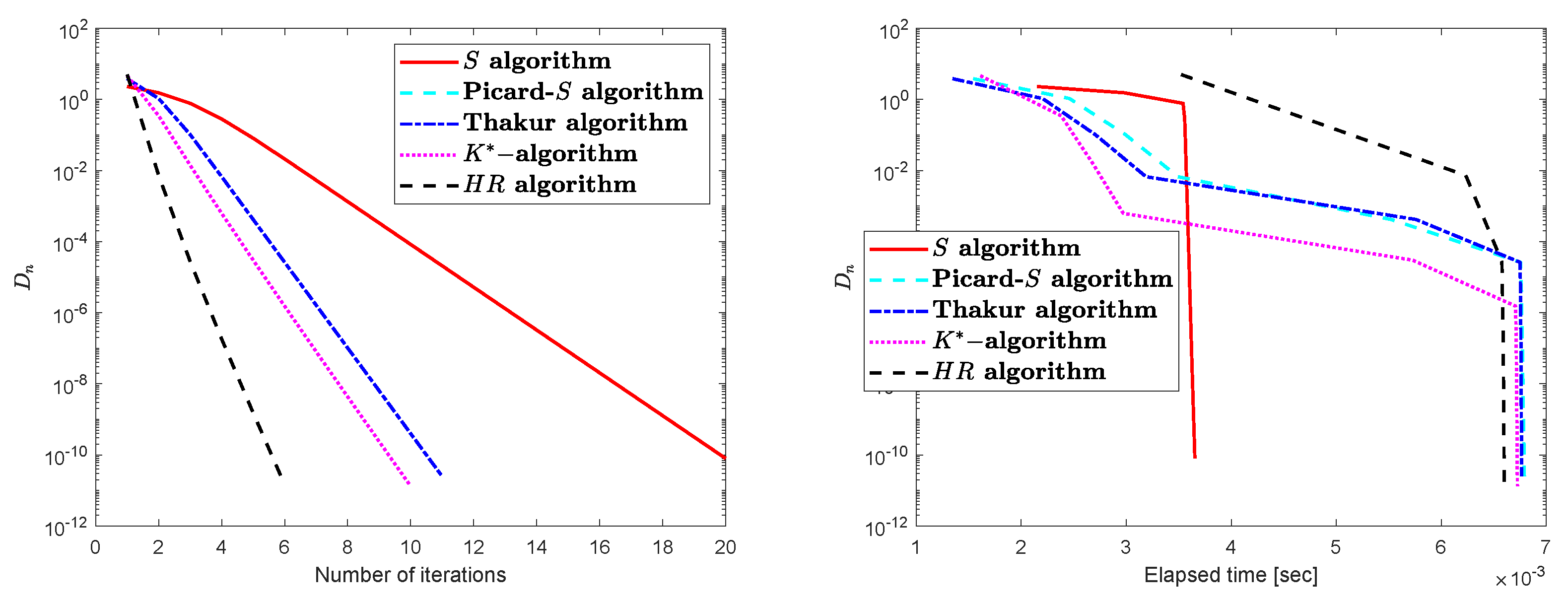
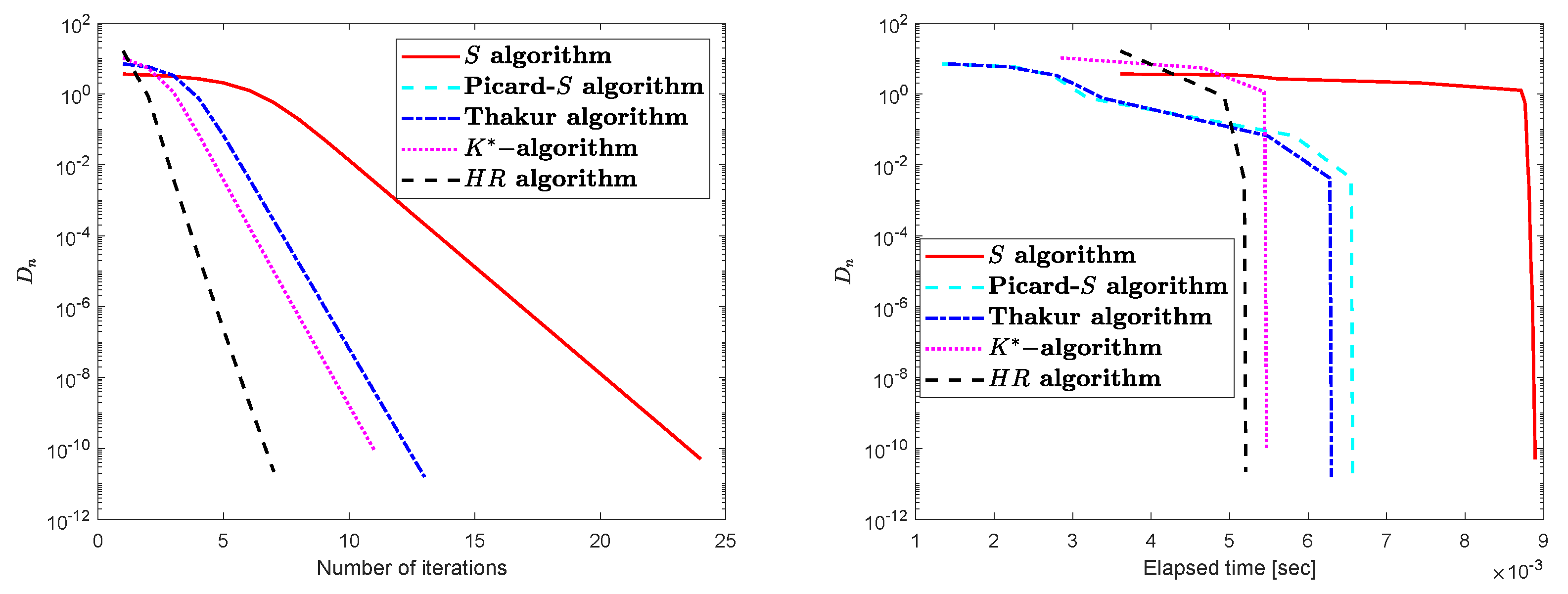
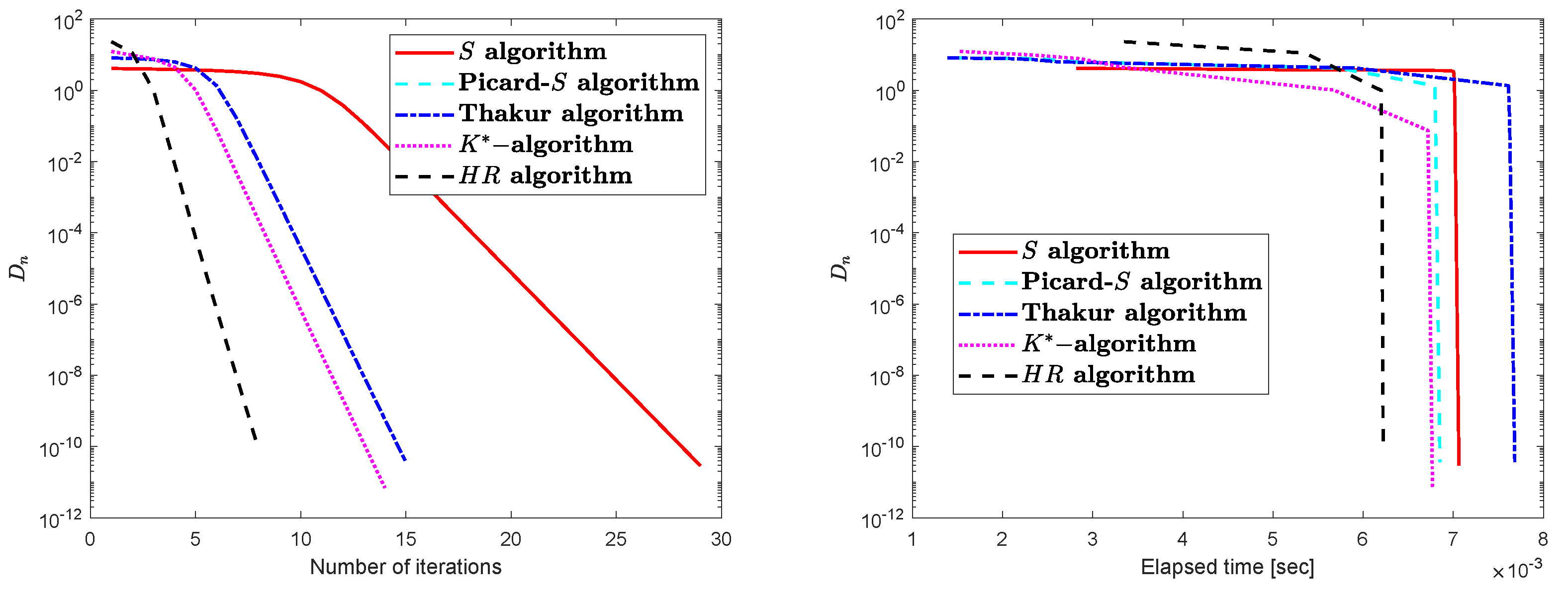
The example that follows examines how well and quickly our method performs when compared to other algorithms, while also illuminating the analytical findings from Theorem 2.
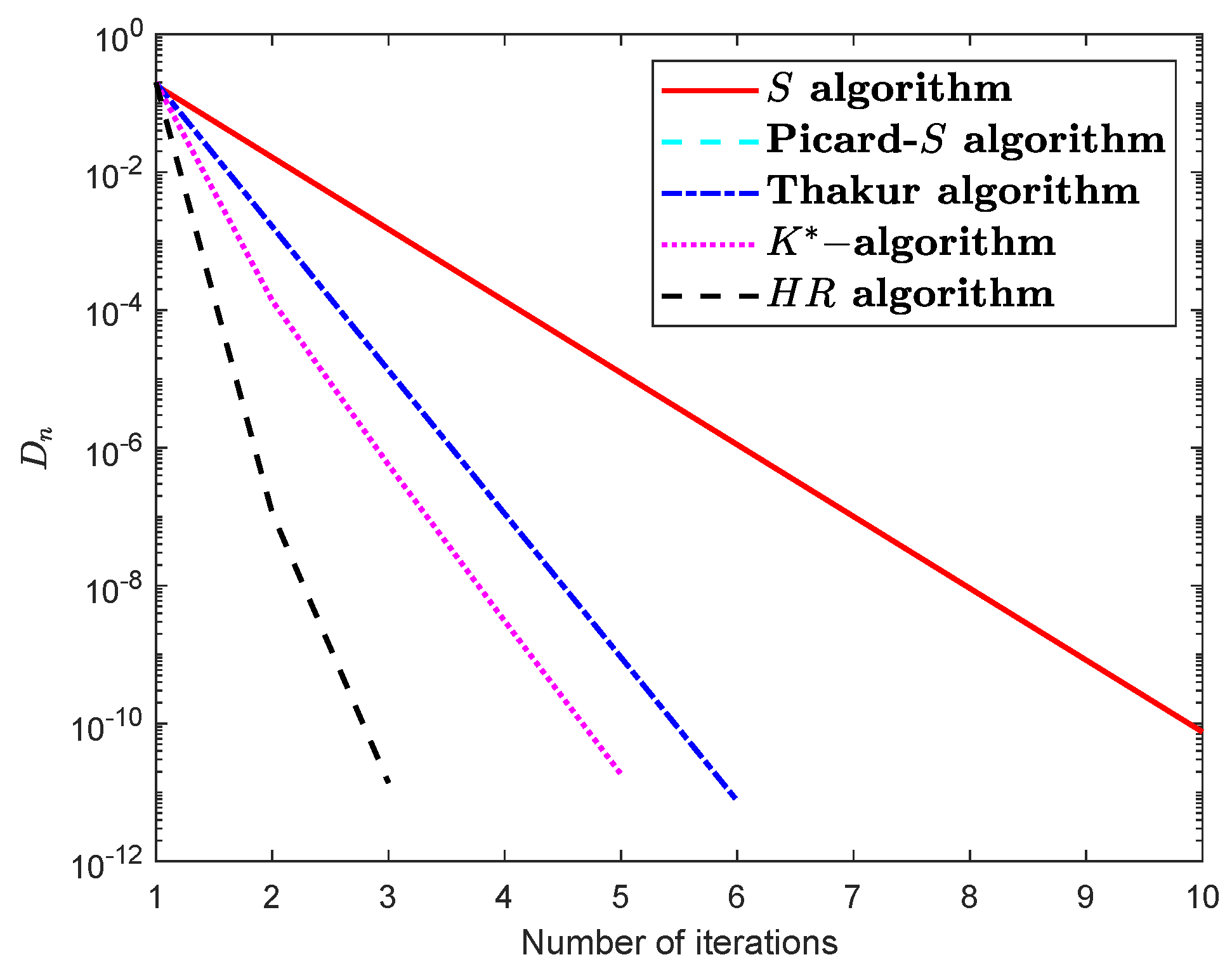
Example 2. Let , , and be a mapping described as Obviously, 6 is a unique FP of Consider with distinct starting points. Then, we get Table 1, Table 2 and Table 3 and Figure 1, Figure 2 and Figure 3 for comparing the different iterative techniques. The example below illustrates how our technique (
7) performs better than some of the best iterative algorithms in the prior literature in terms of convergence speed under specified circumstances.
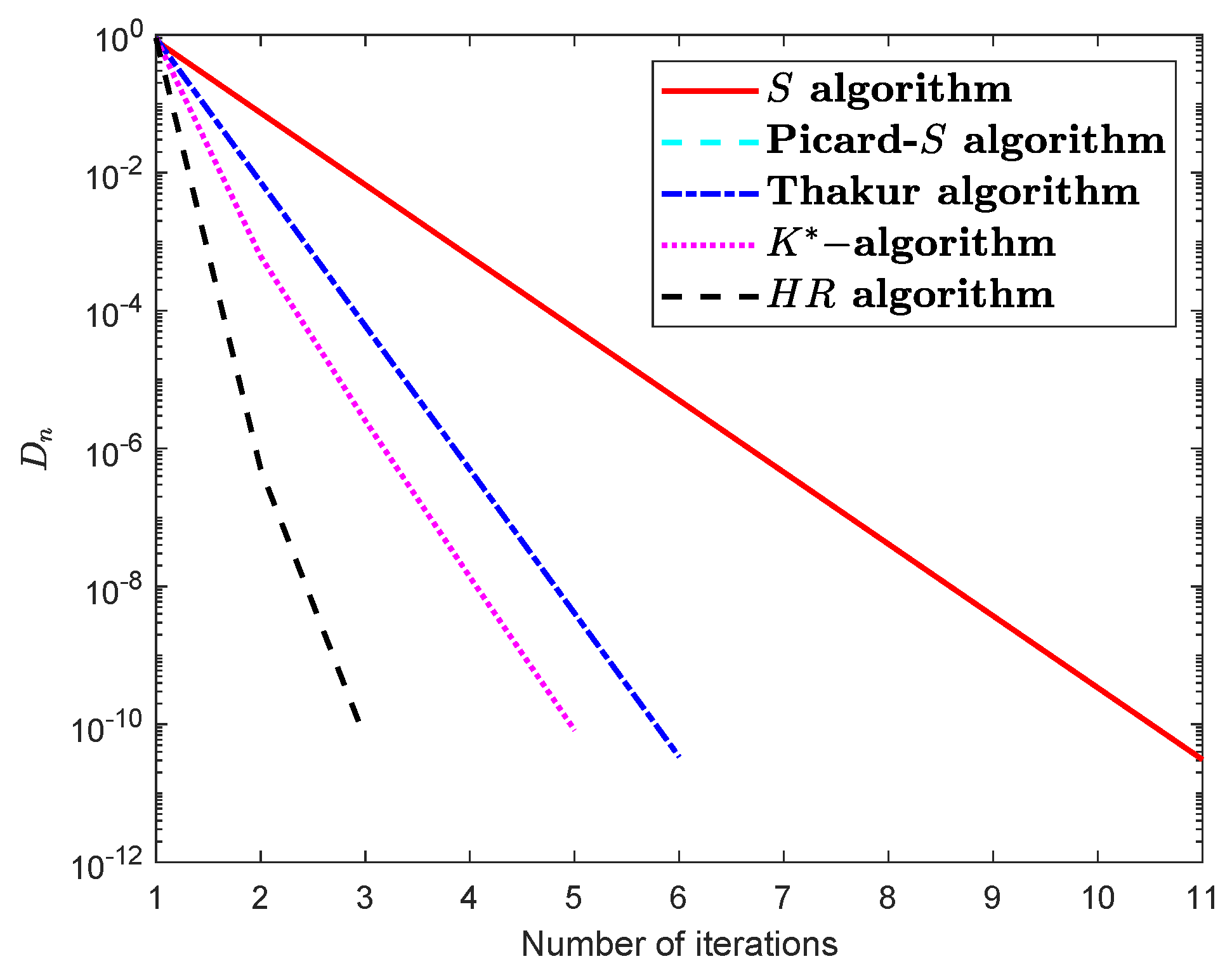
Example 3. Define the mapping by First, we claim that the mapping ℑ is SGNM but not nonexpansive. Put and one hasand Hence This proves that ℑ is not nonexpansive mapping.
After that, to prove the other part of what is required, we discuss the following cases:
(i) If we havesince then we must write Obviously, is impossible. So, Hence, which implies that , thus Now,and (ii) If we get For we obtain which triggers the following positions:
If one can write If one has Since and we have
Clearly, when and is similar to case ; so, we shall discuss when and Considerandwhich implies that Based on the above cases, we conclude that ℑ is an SGNM.
Finally, by employing various control circumstances , we will describe the behavior of technique (7) and show how it is faster than the S, Tharkur, and iteration procedures; see Table 4 and Table 5 and Figure 4 and Figure 5. 








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}