1. Introduction
With the development of human society, educational issues [
1,
2,
3,
4,
5] are gradually attracting people’s attention and are not ignored. Doubts [
6] are a universal phenomena during the process of learning knowledge. The influence and significance of doubt in experience of acquiring knowledge are focused on by many scholars [
7,
8,
9]. As time goes by, there exists a dynamic process of mutual transformation between understanding and doubt. That is, understanding can be transformed into doubt, and doubt can also be transformed into understanding [
10]. Therefore, Monterio and Notargiacomo [
11] proposed that the learning process as the interplay between understanding and doubt can be studied by formulating and analyzing a dynamical system written in term of differential equations. In order to better study this, the entirety of knowledge is divided into two parts: one part is already understood, and the other is still doubted. The first “understanding–doubt” model was put forward as follows.
U and D describe the level of understanding and doubt with time t during the learning process, respectively. and stand for the minimum background required to learn about a subject and the maximum level of doubt that learner can have about a subject that they did not learn about it, respectively. a and b represent the speed of the learning process. The parameters f and g describe the interaction between and and . At the standing point of physical meaning, the term restricts the dynamics to the right triangle domain given by , and . Authors have studied the stability of the boundary equilibria and provided some numerical simulations to verify the theoretical results.
Liu, Ding and Chen performed deep studies of System (
1) in [
12]. They gave a complete analysis of the qualitative properties of the interior equilibria and a singular line segment. They also investigated some local bifurcation, including transcritical, pitchfork, and Hopf bifurcation [
13,
14] on isolated equilibrium, and transcritical bifurcation without parameters on non-isolated equilibrium.
However, dynamical behavior of the learning-process model in a case where the system admits a unique interior equilibrium can be studied further. Meanwhile, bifurcation of a higher codimension, which is the Bogdanov–Takens bifurcation of codimension 2, is worth analyzing since, compared to bifurcation of codimension 1, bifurcation of codimension 2 demonstrates more realistic dynamic behavior between understanding and doubt in the learning process.
Compared to the works by Liu, Ding and Chen in [
12] we will give the analysis of Bogdanov–Takens bifurcation [
15,
16,
17] of codimension 2 when System (
1) admits a unique interior equilibrium (cusp).
This paper is arranged as follows. We obtain the sufficient conditions for the existence of the cusp [
18] of codimension 2 in
Section 2. In
Section 3, we prove that System (
1) undergoes Bogdanov–Takens bifurcation of codimension 2 and the theoretical results are verified by numerical simulation. A brief ends this paper in
Section 4.
2. The Existence of the Cusp of Codimension 2
For simplicity, we make a time rescaling
, and System (
1) becomes
where
.
For physical meaning, we only consider the dynamic behavior of System (
2) in the closure
for all possibilities of
.
The equilibria of System (
2) are determined by the following equation:
There exists a singular line segment
and three boundary equilibria
. The interior equilibria of System (
2) are determined by the following equation:
Substituting
into Equation (
4), we obtain
and
From
, we have
The Jacobian matrix of System (
2) at any equilibrium
of System (
2) takes the form
where
and
,
.
Substituting (
5) into
and
, we can rewrite
and
as
and
Therefore, from
and
, we consider quadratic function
to have double zeros
if
, which means that System (
2) admits a degenerate equilibrium
. Furthermore, if
and
, then we have
Therefore, System (
2) admits a degenerate equilibrium
.
In order to ensure , and , the parameters f, g and should satisfy , , and .
Additionally, equilibrium should lie on the right triangle domain , so we have . On the other hand, , and we need to ensure , thus holds.
Summing up the above, we have the following theorem:
Theorem 1. Based on , , and there exists a unique degenerate equilibrium in system (2). Combining above results with Theorem 2.1 in [
12], we have the following theorem:
Theorem 2. Depending on condition for existence of equilibrium , boundary equilibria of system (2) have the following qualitative properties: The origin : is a saddle;
Equilibrium : is a stable node;
Equilibrium : is an unstable node.
In the following, we determine type of equilibrium .
Theorem 3. From condition for existence of degenerate equilibrium and equilibrium is a cusp of codimension 2.
Proof. Making a transformation
, then system (
2) becomes
where
Since
, we perform linear transformation
, then System (
6) becomes
where
By Remark 1 of Section 2.13 in [
19], we obtain an equivalent system of System (
7) in the small neighborhood of
as follows
where
If
then
, which means that degenerate equilibrium
is a cusp of codimension 2. □
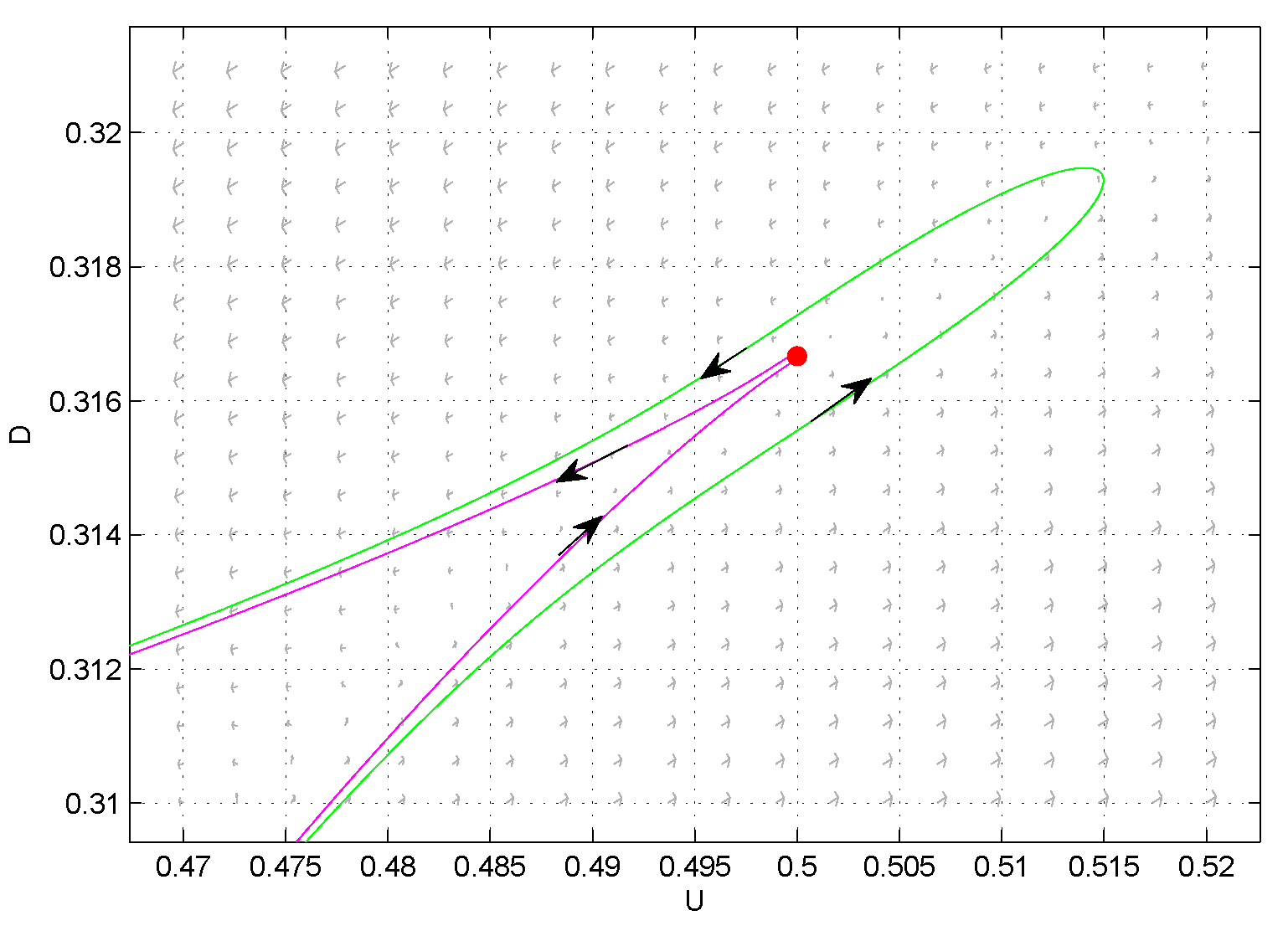
Setting
, the phase portrait of cusp of codimension 2 of is described with the help of Matlab; see
Figure 1.
Remark 1. From [11], if doubt destroys comprehension, then and ; if doubt drives comprehension, then and . Therefore, according to sufficient condition for existence of cusp of codimension 2, doubt destroys comprehension. 3. Analysis of Bogdanov–Takens Bifurcation
From
Section 2, we know that
is a cusp of codimension 2. In this section, we investigate Bogdanov–Takens bifurcation around
.
Theorem 4. Under the condition for the existence of equilibrium , which is a cusp of codimension 2, we choose α and r as bifurcation parameters. As the parameters disturb around , system (2) undergoes Bogdanov–Takens bifurcation in a small neighborhood of . Proof. We choose
and
r as two bifurcation parameters and replace
and
r with
and
, respectively, in System (
2). Then, we acquire the unfolding system of System (
2):
where
is a parameter vector in a small neighborhood of origin. Obviously, when
, System (
9) has a unique positive equilibrium
, which is a cusp of codimension 2. For simplicity, the universal unfolding will be obtained with the help of a series of transformation in the following.
Making a translation transformation
, equilibrium
will be translated into
, then System (
9) becomes
where
To save space, the current expression consists of a previous expression when System (
10) undergoes each approximate identity transformation in the following.
Letting
, System (
10) can be written as
where
To remove
from System (
11), introduce a new time variable
with
and make
, then System (
11) becomes (rewriting
as
t):
where
From
, when
(
i = 1, 2) are small, we have
. Therefore,
can be reduced into
with the following coordinates change:
then System (
12) can be transformed into (rewriting
as
t)
where
Making the transformation
in System (
13) can be removed, then System (
13) becomes
where
From
, when
(
i = 1, 2) are small, we have
. Employing the change of variables again,
we obtain the universal unfolding of System (
9),
where
The transversality condition
holds. Therefore, from the Bogdanov–Takens bifurcation theorem [
19,
20], System (
2) undergoes a Bogdanov–Takens bifurcation of codimension 2, which includes a sequence of bifurcations of codimension 1: saddle-node bifurcation, Hopf bifurcation and homoclinic bifurcation, when the parameters
and
vary in a small neighborhood of
. □
Turning to Matlab, we provide some data groups to simulate the dynamic process of Bogdanov–Takens bifurcation to support the theoretical results. Let
and
, then
and System (
9) becomes
System (
16) will present different phase portraits according to following six examples for disturbance of
and
.
Example 1: System (
16) admits a cusp of codimension 2 if
; see
Figure 1.
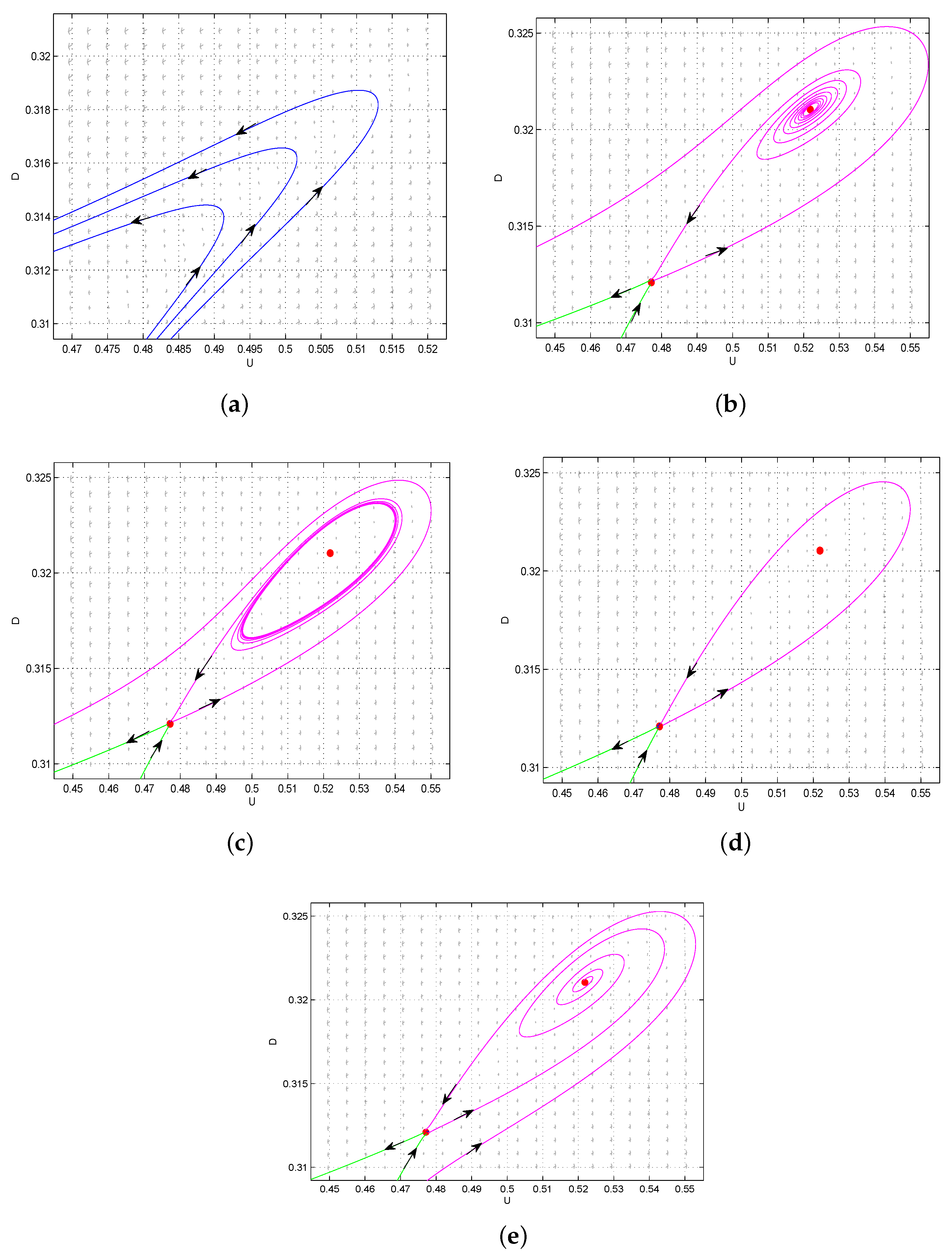
Example 2: there exists no equilibrium in System (
16) if
; see
Figure 2a.
Example 3: set
, System (
16) admits an unstable focus and a saddle; see
Figure 2b.
Example 4: take
, System (
16) has a stable focus surrounded by an unstable limit cycle; see
Figure 2c.
Example 5: System (
16) has an unstable homoclinic loop consisted of a saddle and an unstable homoclinic orbit if
; see
Figure 2d.
Example 6: if
, there is a stable focus and a saddle in System (
16); see
Figure 2e.
4. Conclusions
The dynamical behavior of System (
1) around the unique positive equilibrium
was investigated in this manuscript. The case that the Jacobian matrix
has two zero eigenvalues is focused. We proved that equilibrium
is a cusp of codimension 2 through linear transformation and normal form theory [
20].
From Theorems 1 and 3, in order to ensure that System (
1) admits a cusp of codimension 2, parameters
f and
g must satisfy
and
. Therefore, doubt should be regarded as restraining force and destroys comprehension in the learning process if System (
1) has a cusp of codimension 2 and undergoes Bogdanov–Takens bifurcation of codimension 2.
By Theorem 4, System (
1) undergoes Bogdanov–Takens bifurcation of codimension 2, which leads to potentially dramatic changes in the system, hence bifurcation of codimension 2 should be not ignored. Due to a saddle-node bifurcation, the number of the interior equilibrium is zero, one, or two as parameters
and
r are disturbed.Thus, there are some values of parameters such as that understanding and doubt co-exist in the form of interior equilibrium for different initial values. Through a Hopf bifurcation, there is a limit cycle appearing in System (
1). As seen in
Figure 2c, an unstable limit cycle is produced by the Hopf bifurcation. When all initial values lying inside the limit cycle, the orbit will tend to the interior equilibrium at last. That is, understanding and doubt will reach a steady state. In other words, knowledge can not be absorbed fully; once the learner decreases the time to understand, doubts regarding the knowledge will increase. From homoclinic bifurcation, a homoclinic loop appears in System (
1). As seen in
Figure 2d, an unstable homoclinic loop is consisted of a saddle and an unstable homoclinic orbit, which means that understanding and doubt co-exist in the form of an interior equilibrium for all initial values lying inside the homoclinic loop.
It is noteworthy that when all initial values lying outside the unstable limit cycle and unstable homoclinic loop, combining with Theorem 2, the orbit will tend to the equilibrium . That is, if enough time was taken, the learner will feel confident with the knowledge at last.
Above all, the occurrences of Bogdanov–Takens bifurcation yields to more complex dynamical behavior, including bifurcations of codimension one. It is very sensitive to the choice of coefficient of difficulty in studying material and the speed of the learning process, which indicates that the selection of learning and teaching methods should be put forward higher requirements for students and teachers in education.
However, the existence condition of Bogdanov–Takens of codimension 2 is sufficient and the Bogdanov–Takens bifurcation of higher codimensions in the distribution functions [
21] is worth studying in the future.


{kind=link}
{kind=link}

