
Ulam–Hyers Stability and Simulation of a Delayed Fractional Differential Equation with Riemann–Stieltjes Integral Boundary Conditions and Fractional Impulses


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries
- (i)
- , .
- (ii)
- , .
- (iii)
- , .
3. Existence Results
- (H1)
- , , s.t.
- (H2)
- , , s.t.
- (H3)
- , , s.t.
- (H4)
- , and , whereand
- (H5)
- , , and s.t. , where stands for the -Lebesgue measurable function space with the norm .
- (H6)
- , , s.t. , .
- (H7)
- , , s.t. , .
4. UH Stability
- (1)
- , , and , ;
- (2)
- , , ;
- (3)
- , ;
- (4)
- , ;
- (5)
- ,
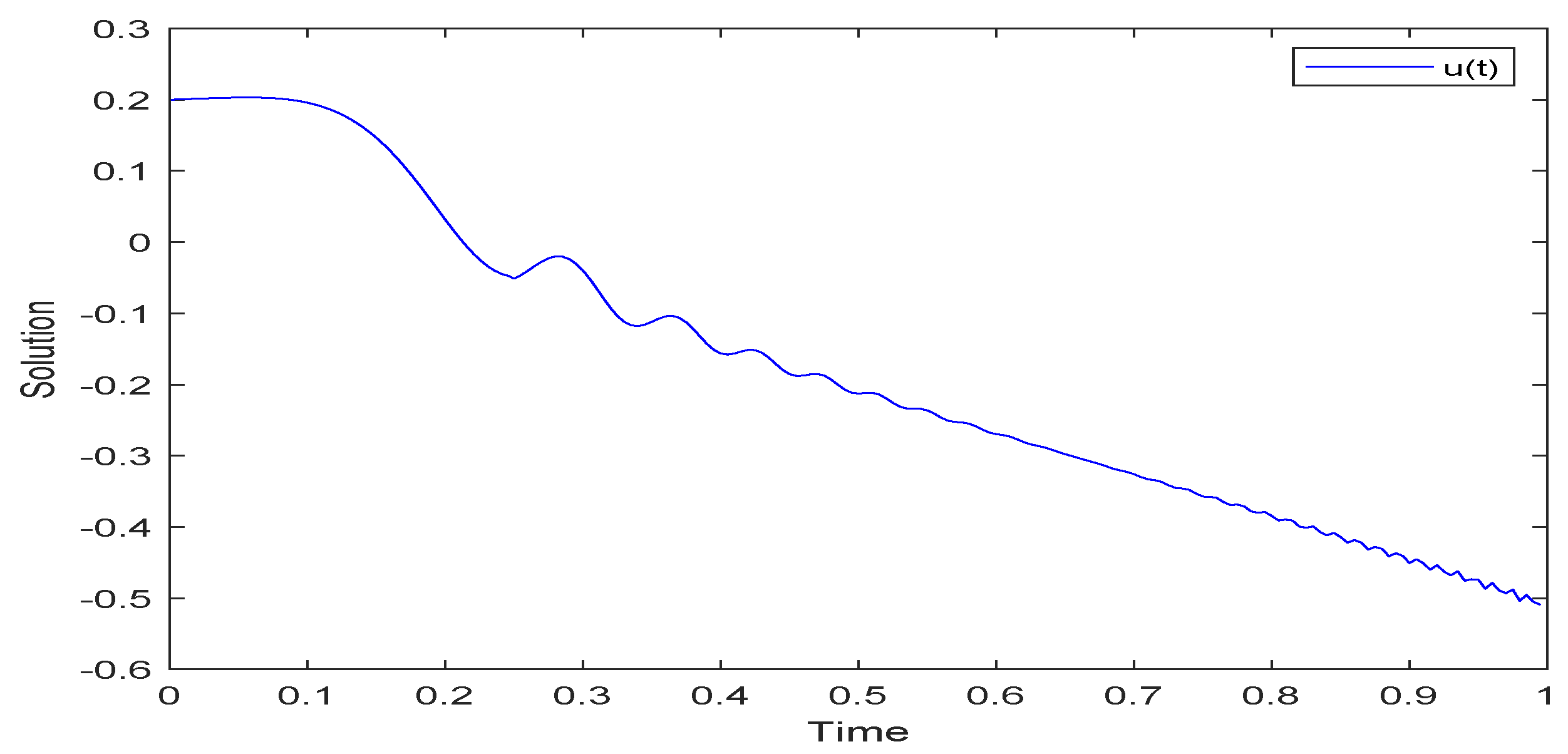
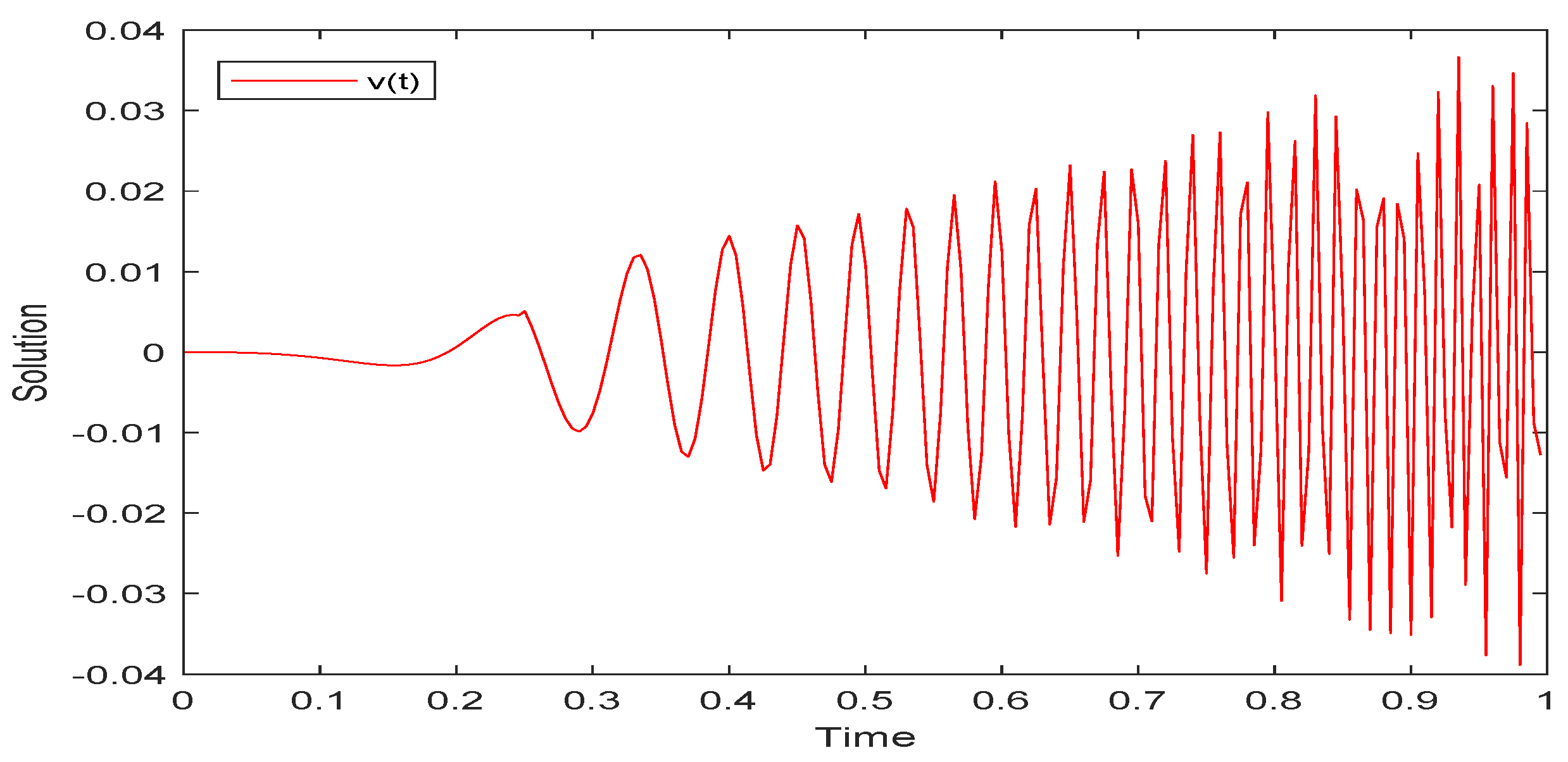
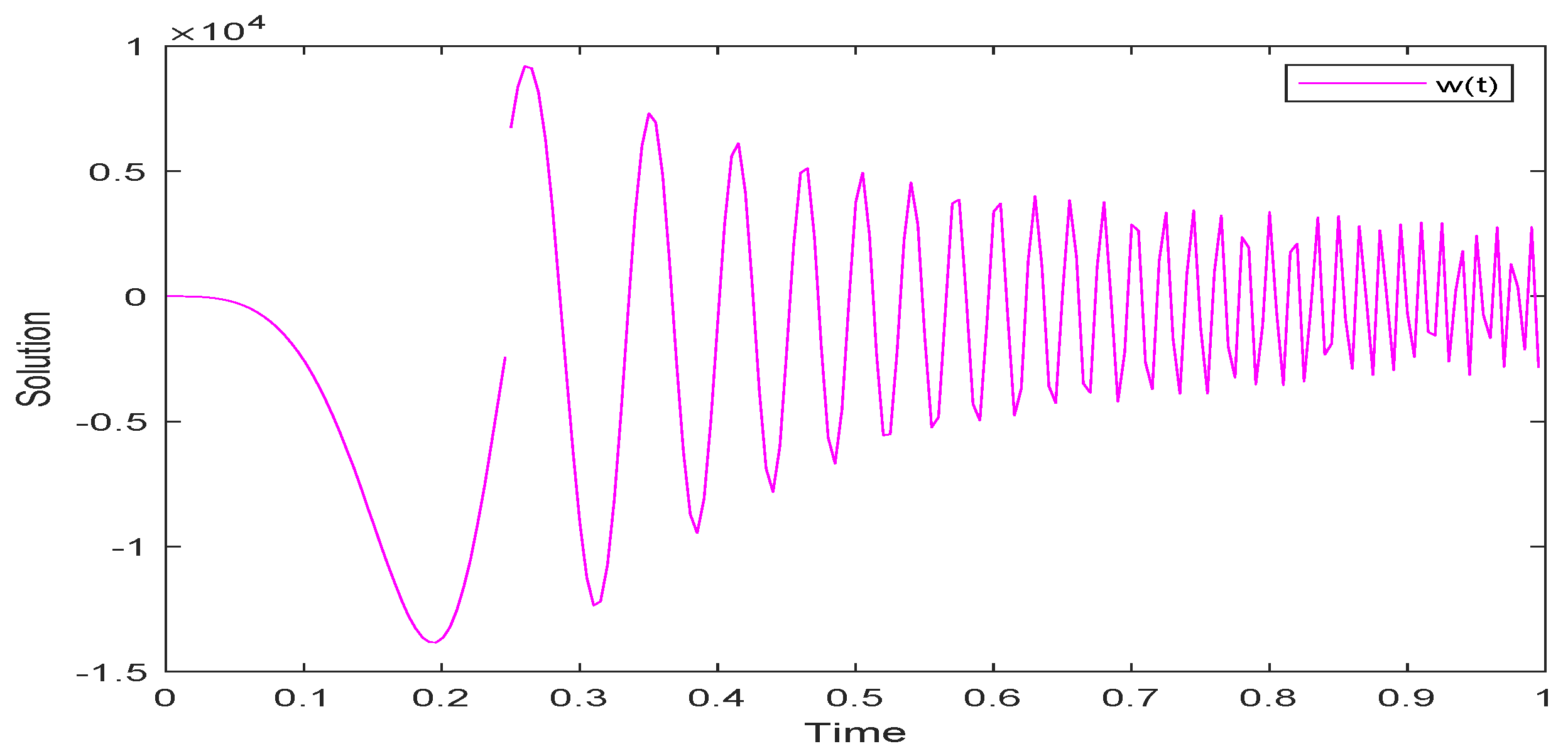
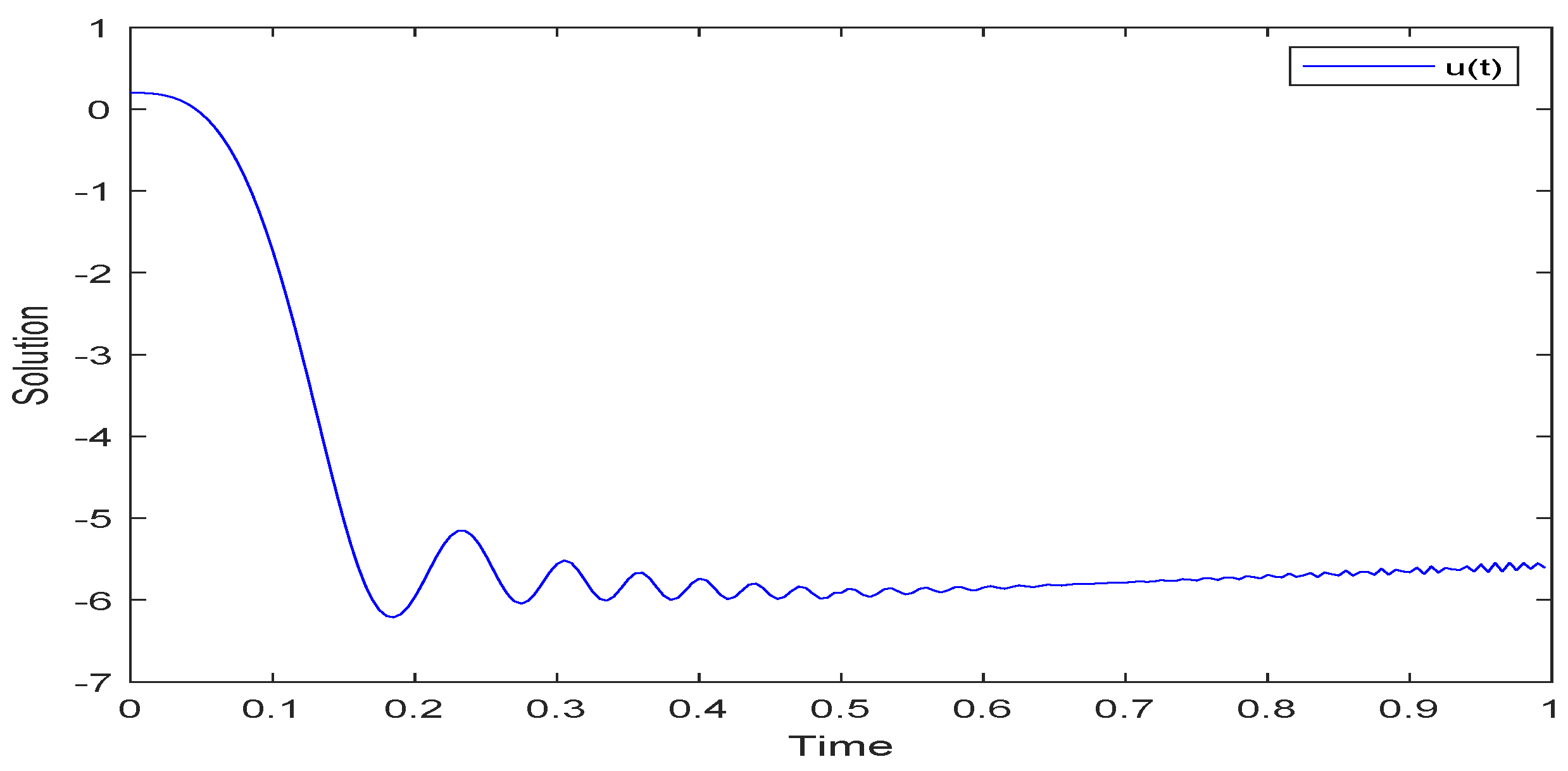
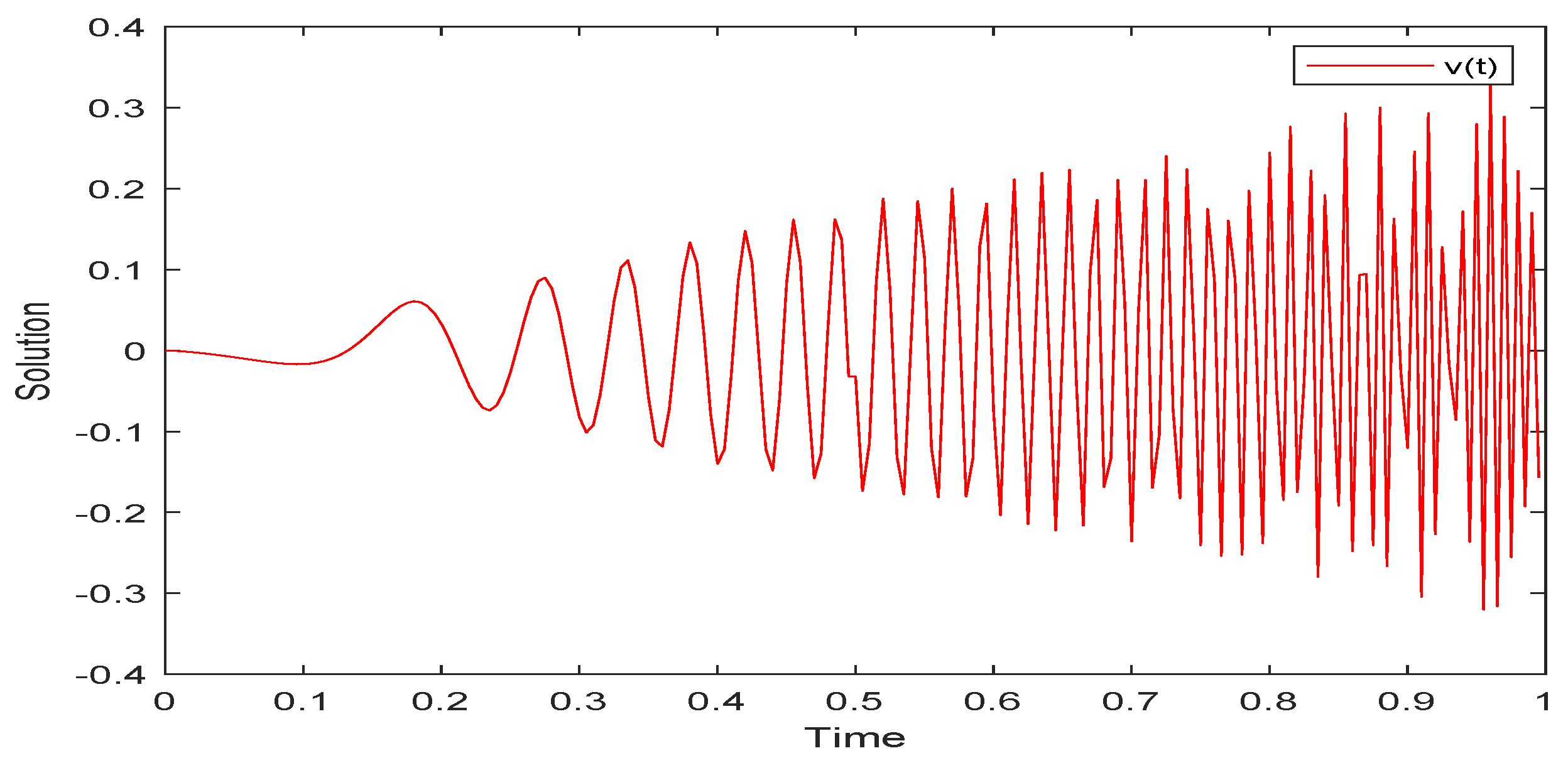
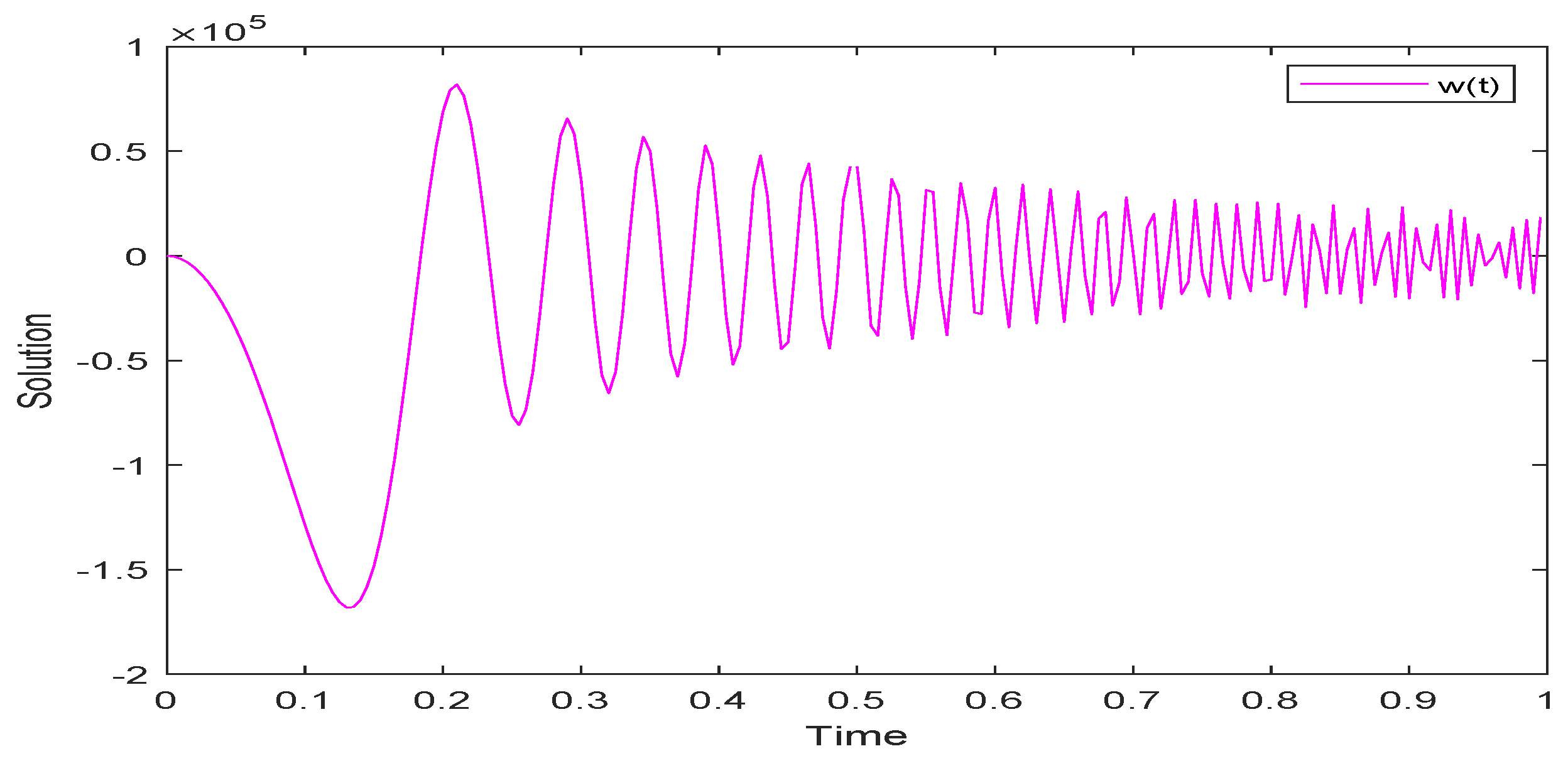
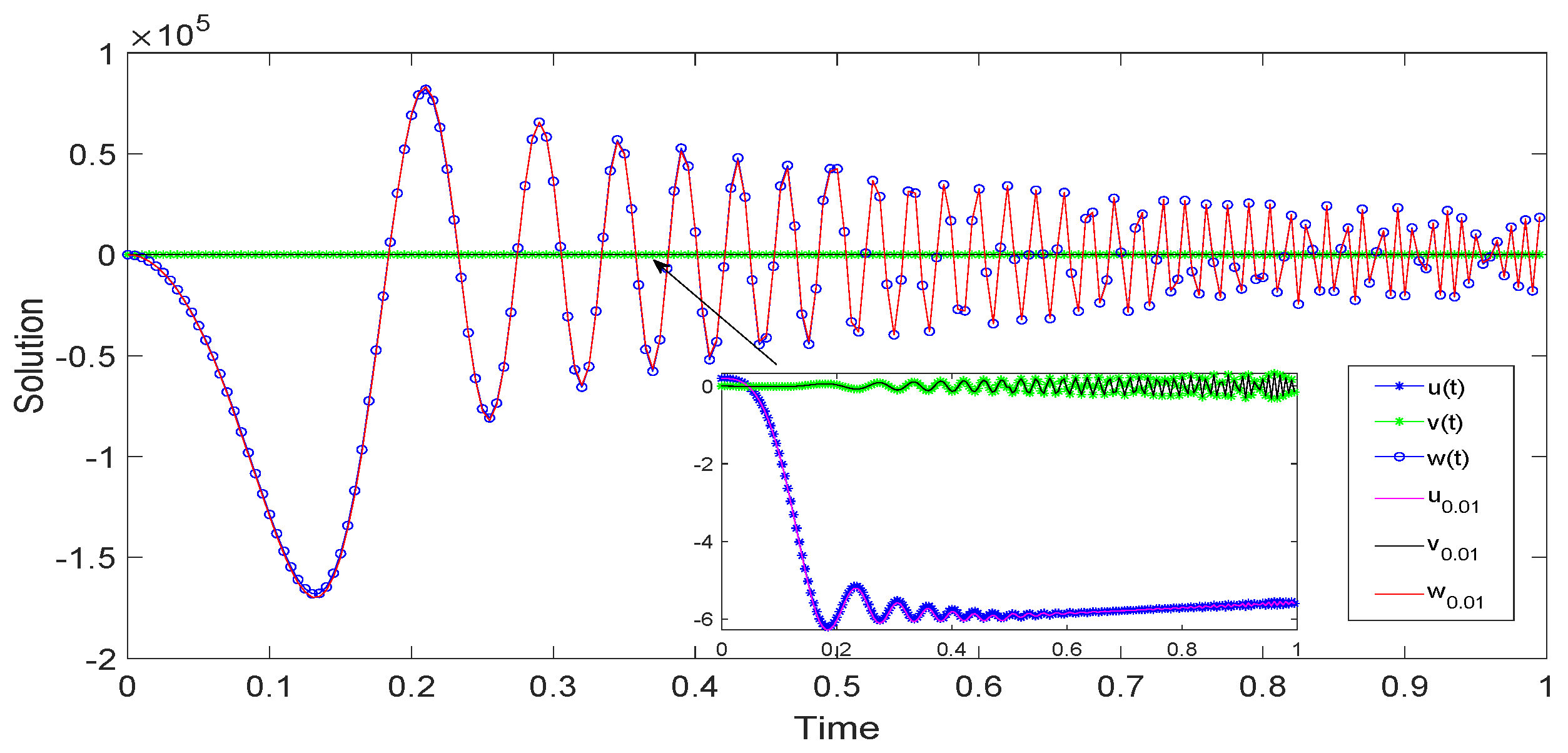
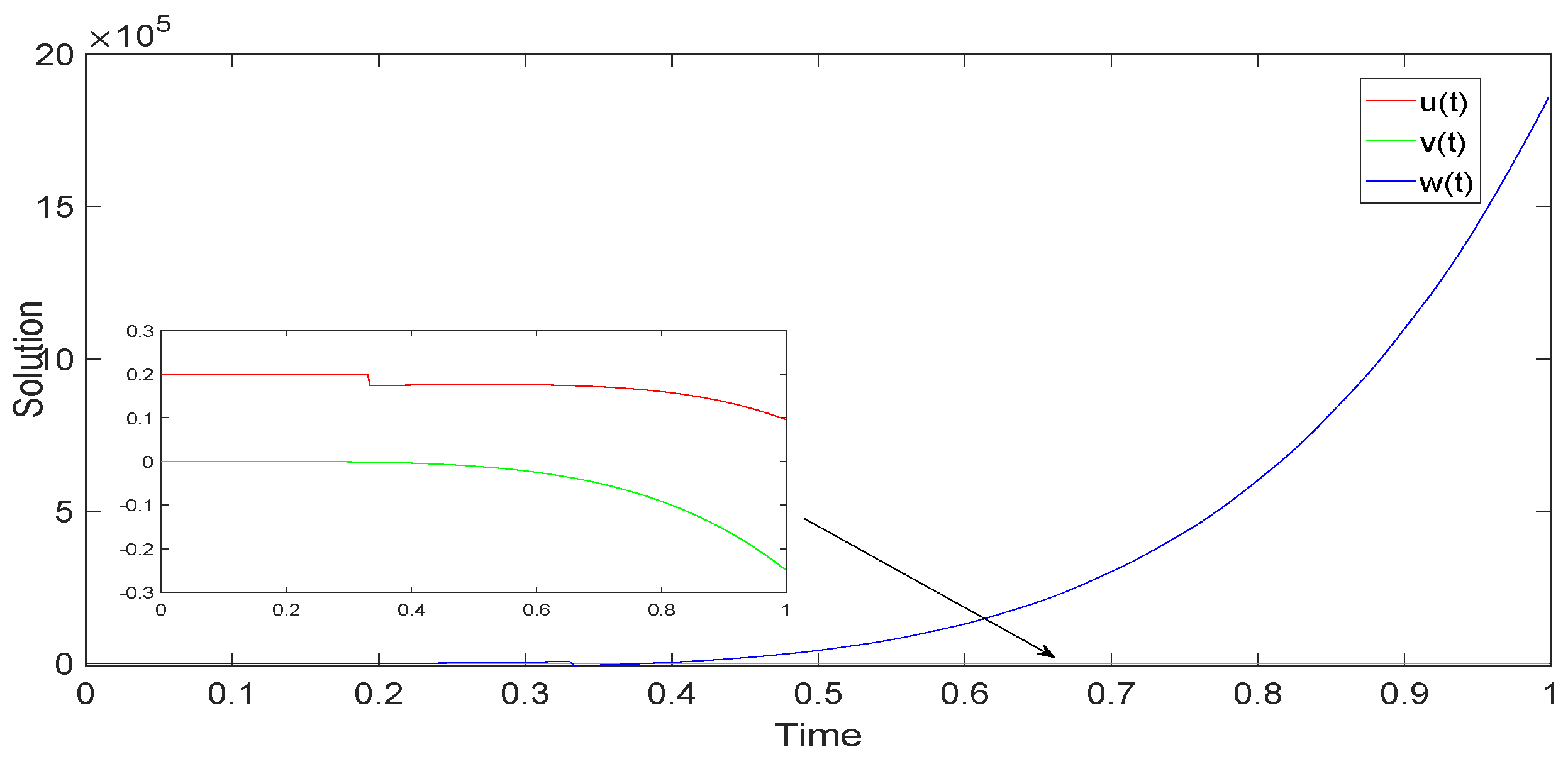
5. Examples and Simulations
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Atangana, A.; Alkahtani, B. Extension of the resistance, inductance, capacitance electrical circuit to fractional derivative without singular kernel. Adv. Mech. Eng. 2015, 7, 1–6. [Google Scholar] [CrossRef]
- Alizadeh, S.; Baleanu, D.; Rezapour, S. Analyzing transient response of the parallel RCL circuit by using the Caputo-Fabrizio fractional derivative. Adv. Differ. Equ. 2020, 2020, 55. [Google Scholar] [CrossRef]
- Baleanu, D.; Jajarmi, A.; Mohammadi, H.; Rezapour, S. A new study on the mathematical modelling of human liver with Caputo-Fabrizio fractional derivative. Chaos Soliton. Fract. 2020, 134, 109705. [Google Scholar] [CrossRef]
- Rahman, M.; Ahmad, S.; Matoog, R.; Alshehri, N.; Khan, T. Study on the mathematical modelling of COVID-19 with Caputo-Fabrizio operator. Chaos Soliton. Fract. 2021, 150, 111121. [Google Scholar] [CrossRef] [PubMed]
- Javidi, M.; Ahmad, B. Dynamic analysis of time fractional order phytoplankton-toxic phytoplankton-zooplankton system. Ecol. Model. 2015, 318, 8–18. [Google Scholar] [CrossRef]
- Chatterjee, A.; Ahmad, B. A fractional-order differential equation model of COVID-19 infection of epithelial cells. Chaos Soliton. Fract. 2021, 147, 110952. [Google Scholar] [CrossRef]
- Zhao, K. Stability of a nonlinear ML-nonsingular kernel fractional Langevin system with distributed lags and integral control. Axioms 2022, 11, 350. [Google Scholar] [CrossRef]
- Zhao, K. Stability of a nonlinear Langevin system of ML-type fractional derivative affected by time-varying delays and differential feedback control. Fractal Fract. 2022, 6, 725. [Google Scholar] [CrossRef]
- Li, M.; Sun, J.; Zhao, Y. Existence of positive solution for BVP of nonlinear fractional differential equation with integral boundary conditions. Adv. Differ. Equ. 2020, 2020, 177. [Google Scholar] [CrossRef]
- Zhang, X.; Liu, L.; Wu, Y. Multiple positive solutions of a singular fractional differential equation with negatively perturbed term. Math. Comput. Model. 2012, 55, 1263–1274. [Google Scholar] [CrossRef]
- Zhao, Y.; Sun, S.; Han, Z.; Zhang, M. Positive solutions for boundary value problems of nonlinear fractional differential equations. Appl. Math. Comput. 2011, 217, 6950–6958. [Google Scholar]
- Zhang, S. Positive solutions to singular boundary value problem for nonlinear fractional differential equation. Comput. Math. Appl. 2010, 59, 1300–1309. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, L.; Wu, Y. Positive solutions for a class of fractional boundary value problem with changing sign nonlinearity. Nonlinear Anal.-Theor. 2011, 74, 6434–6441. [Google Scholar] [CrossRef]
- Liu, Y. Solvability of anti-periodic BVPs for impulsive fractional differential systems involving Caputo and Riemann-Liouville fractional derivatives. Int. J. Nonlinear Sci. Numer. Simul. 2018, 19, 125–152. [Google Scholar] [CrossRef]
- Jiang, D.; Yuan, C. The positive properties of the green function for Dirichlet-type boundary value problems of nonlinear fractional differential equations and its application. Nonlinear Anal. TMA 2010, 72, 710–719. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, L. Positive properties of the green function for two-term fractional differential equations and its application. J. Nonlinear Sci. Appl. 2017, 10, 2094–2102. [Google Scholar] [CrossRef]
- Cao, J.; Chen, H. Impulsive fractional differential equations with nonlinear boundary conditions. Math. Comput. Model. 2012, 55, 303–311. [Google Scholar] [CrossRef]
- Bai, C. Impulsive periodic boundary value problems for fractional differential equation involving Riemann-Liouville sequential fractional derivative. J. Math. Anal. Appl. 2011, 384, 211–231. [Google Scholar] [CrossRef]
- Wang, G.; Ahmad, B.; Zhang, L. Impulsive anti-periodic boundary value problem for nonlinear differential equations of fractional order. Nonlinear Anal.-Theor. 2011, 74, 792–804. [Google Scholar] [CrossRef]
- Zhao, K. Existence and UH-stability of integral boundary problem for a class of nonlinear higher-order Hadamard fractional Langevin equation via Mittag-Leffler functions. Filomat 2023, 37, 1053–1063. [Google Scholar] [CrossRef]
- Ahmad, B.; Alghanmi, M.; Ntouyas, S.; Alsaedi, A. Fractional differential equations involving generalized derivative with Stieltjes and fractional integral boundary conditions. Appl. Math. Lett. 2018, 84, 111–117. [Google Scholar] [CrossRef]
- Ulam, S. A Collection of Mathematical Problems. Interscience Tracts in Pure and Applied Mathmatics; Interscience: New York, NY, USA, 1906. [Google Scholar]
- Hyers, D. On the stability of the linear functional equation. Proc. Natl. Acad. Sci. USA 1941, 27, 2222–2240. [Google Scholar] [CrossRef] [PubMed]
- Forti, G. Hyers-Ulam stability of functional equations in several variables. Aeq. Math. 1995, 50, 143–190. [Google Scholar] [CrossRef]
- Brzdek, J.; Popa, D.; Raşa, I.; Xu, B. Ulam Stability of Operators; Academic Press: London, UK, 2018. [Google Scholar]
- Hyers, D.; Isac, G.; Rassias, T. Stability of Functional Equations in Several Variables; Birkhäuser: Boston, MA, USA, 1998. [Google Scholar]
- Czerwik, S. Functional Equations and Inequalities in Several Variables; World Scientific: Singapore, 2002. [Google Scholar]
- Aderyani, S.; Saadati, R.; Li, C.; Allahviranloo, T. Towards Ulam Type Multi Stability Analysis; Springer: Cham, Switzerland, 2024. [Google Scholar]
- Zhao, K. Solvability, Approximation and Stability of Periodic Boundary Value Problem for a Nonlinear Hadamard Fractional Differential Equation with p-Laplacian. Axioms 2023, 12, 733. [Google Scholar] [CrossRef]
- Zhao, K.; Liu, J.; Lv, X. A Unified Approach to Solvability and Stability of Multipoint BVPs for Langevin and Sturm-Liouville Equations with CH-Fractional Derivatives and Impulses via Coincidence Theory. Fractal Fract. 2024, 8, 111. [Google Scholar] [CrossRef]
- Rezaei, H.; Jung, S.; Rassias, T. Laplace transform and Hyers-Ulam stability of linear differential equations. J. Math. Anal. Appl. 2013, 403, 244–251. [Google Scholar] [CrossRef]
- Lv, X.; Zhao, K.; Xie, H. Stability and Numerical Simulation of a Nonlinear Hadamard Fractional Coupling Laplacian System with Symmetric Periodic Boundary Conditions. Symmetry 2024, 16, 774. [Google Scholar] [CrossRef]
- Zhao, K. Study on the stability and its simulation algorithm of a nonlinear impulsive ABC-fractional coupled system with a Laplacian operator via F-contractive mapping. Adv. Contin. Discret. Model. 2024, 2024, 5. [Google Scholar] [CrossRef]
- Wang, C.; Xu, T. Hyers-Ulam stability of fractional linear differential equations involving Caputo fractional derivatives. Appl. Math. Comput. 2015, 60, 383–393. [Google Scholar] [CrossRef]
- Wang, J.; Li, X. Ulam-Hyers stability of fractional Langevin equations. Appl. Math. Comput. 2015, 258, 72–83. [Google Scholar] [CrossRef]
- Zhao, K. Existence, stability and simulation of a class of nonlinear fractional Langevin equations involving nonsingular Mittag-Leffler kernel. Fractal Fract. 2022, 6, 469. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations; Academic Press: New York, NY, USA, 1993. [Google Scholar]
- Klbas, A.; Srivastava, H.; Trujillo, J. Theory and Applications of Fractional Differential Equation; Elsevier: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Guo, D.; Lakshmikantham, V. Nonlinear Problems in Abstract Cone; Academic Press: Orlando, FL, USA, 1988. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lv, X.; Zhao, K.; Xie, H. Ulam–Hyers Stability and Simulation of a Delayed Fractional Differential Equation with Riemann–Stieltjes Integral Boundary Conditions and Fractional Impulses. Axioms 2024, 13, 682. https://doi.org/10.3390/axioms13100682
Lv X, Zhao K, Xie H. Ulam–Hyers Stability and Simulation of a Delayed Fractional Differential Equation with Riemann–Stieltjes Integral Boundary Conditions and Fractional Impulses. Axioms. 2024; 13(10):682. https://doi.org/10.3390/axioms13100682
Chicago/Turabian StyleLv, Xiaojun, Kaihong Zhao, and Haiping Xie. 2024. "Ulam–Hyers Stability and Simulation of a Delayed Fractional Differential Equation with Riemann–Stieltjes Integral Boundary Conditions and Fractional Impulses" Axioms 13, no. 10: 682. https://doi.org/10.3390/axioms13100682