Abstract
In this study, we developed a MATLAB 2024a toolbox that performs advanced algebraic calculations in the algebra of elliptic numbers and elliptic quaternions. Additionally, we introduce color image processing methods, such as principal component analysis, image compression, image restoration, and watermarking, based on singular-value decomposition theory for elliptic quaternion matrices; we added these to the newly developed toolbox. The experimental results demonstrate that elliptic quaternionic methods yield better image analysis and processing performance compared to other hypercomplex number-based methods.
Keywords:
elliptic quaternion matrices; MATLAB toolbox; optimal p-value; singular value decomposition; least minimum error; image processing MSC:
11R52; 15A60; 15A18
1. Introduction
In 1843, Hamilton introduced the concept of real quaternions, expressed as
where , , , and are real-valued components, and the imaginary units i, j, and k satisfy the relations
The absence of the commutative property in quaternion multiplication classifies real quaternions as a division ring or, more specifically, a skew field [1]. This mathematical structure finds its application across a broad spectrum of disciplines, including but not limited to quantum mechanics [2], computer graphics [3], signal and image processing [4], and the study of neural networks [5]. In 2005, Sangwine and Bihan introduced a MATLAB toolbox designed to facilitate the computational demands associated with real quaternions and their matrices. This toolbox, notable for its inclusion of image processing functionalities, has been subject to continuous refinement, with its most recent update occurring in February 2024 [6]. MATLAB introduced quaternion support in the R2018b release as part of the Aerospace Toolbox and, after that, incorporated it into several pivotal MATLAB toolboxes such as the Sensor Fusion and Tracking Toolbox, the Robotics System Toolbox, and the Navigation Toolbox. This expansion highlights the importance and applicability of real quaternions in various technological and scientific areas. However, the noncommutative nature of real quaternion multiplication not only introduces certain constraints in various applications but also causes difficulties in calculations. For instance, the inherent complexity in performing the singular-value decomposition of a real quaternion matrix is notably high, registering a computational complexity of for an real quaternion matrix, considering that its complex representation is of size . Additionally, the convolution theorem does not hold for real quaternion-valued signals; that is, the Fourier transform of the convolution products of two such signals does not equate to the dot products of their respective Fourier transforms. This deviation from the convolution theorem implies that the fast Fourier transform algorithm remains undeveloped for real quaternion-valued linear time-invariant systems, presenting challenges in their analysis [7].
As the need for more efficient and versatile algebraic structures grew, researchers sought alternatives to real quaternions that retained the benefits of hypercomplex numbers while mitigating some of the associated limitations. This search led to the development of generalized Segre quaternions, a class of four-dimensional commutative hypercomplex numbers. These quaternions have been gaining attention due to their ability to extend methodologies from the real and complex number domains to more versatile four-dimensional counterparts [8,9]. The definition of generalized Segre quaternions is as follows:
where and . The multiplication rules for the units are given by
where . Based on the value of p, generalized Segre quaternions are classified into three categories: hyperbolic quaternions (), parabolic quaternions (), and elliptic quaternions () [9]. Each of these systems has specific scientific and technological applications. For example, hyperbolic quaternions are used to solve problems in non-Euclidean geometry [10,11], while parabolic quaternions are applied in robotic control and spatial mechanics [10,12]. Due to the elliptic behavior of many physical systems, elliptic quaternions have significant practical applications in applied science. Additionally, elliptic quaternions offer a notable improvement over real quaternions, especially with their commutative multiplication and enhanced generalization capability [9,10,13,14]. These properties result in reduced computational complexity and improved performance across a range of computational tasks. Specifically, the process of singular-value decomposition within the context of elliptic quaternion matrices is characterized by an algorithmic complexity of , as detailed in [15]. Furthermore, the applicability of the convolution theorem within this mathematical framework enables the formulation of a fast Fourier transform algorithm specifically designed for elliptic quaternion spaces. Consequently, recent developments in elliptic quaternion-valued methodologies have demonstrated their superiority over conventional real quaternion approaches in critical fields such as image processing, signal processing, and deep learning, as evidenced by [7,14,15,16,17].
In this paper, we present a MATLAB toolbox that we developed for performing advanced calculations in elliptic numbers and elliptic quaternions. The aim of this toolbox is to address and provide solutions to the computational challenges associated with these algebraic structures, thereby facilitating further scientific and technological research in this field. This development is fundamentally rooted in the theoretical framework and algorithms delineated in references [9,15,18]. Furthermore, by leveraging mathematical theory and algorithms elucidated in [15], we have enriched this toolbox with advanced color image processing methodologies, including but not limited to principal component analysis, image compression, image restoration, and watermarking techniques. We have observed that the proposed methods for image compression, image restoration, and watermarking exhibit better performance than existing techniques based on separable, real quaternions and reduced biquaternions (for comparison results, see Tables 4–8). Moreover, our performance analyses reveal that the p-value of elliptic quaternions directly affects the solution of the problem, with better results obtained by adjusting this p-value (for optimal p-value results, see Figures 11, 13 and 19).
Within the context of this paper, the following notations are employed. Let , , , and denote the sets of real numbers, complex numbers, elliptic numbers, and elliptic quaternions, respectively. , , , and denote the set of all matrices on , , , and , respectively. Throughout the study, we use the following notations: represents a complex number when , an elliptic number when , and an elliptic quaternion when . Similarly, denotes a complex matrix when , an elliptic matrix when , and an elliptic quaternion matrix when . This study was conducted using MATLAB 2024a (64-bit) on a system equipped with an Intel® Raptor Lake Core™ i7-13700H 14C/20T, NVIDIA® GeForce® RTX4060 and 32 GB of DDR5 RAM.
2. Mathematical Preliminaries
This section establishes the fundamental algebraic properties and the notations for elliptic numbers and elliptic quaternions.
2.1. Elliptic Numbers
An elliptic number is denoted by , where and . The conjugate and norm of are defined as respectively [19]. The multiplication of the elliptic numbers and is defined as
An elliptic matrix is denoted as , where , , and , . The conjugate, transpose, conjugate transpose, and Frobenius norm of are defined by , and , respectively [15,19]. The multiplication of two elliptic matrices and is defined as
There exists an isomorphism between elliptic matrices and complex matrices, as depicted in the following:
where I represents the complex unit () [15].
Lemma 1
([15]). Let the eigenvalues of a complex matrix be denoted by , and let the corresponding eigenvectors be represented by Then, the eigenvalues of the elliptic matrix are given by
and the corresponding eigenvectors are given by
Lemma 2
([15]). Let . The pseudoinverse of is given by
where is the pseudoinverse of the complex matrix .
Lemma 3
([15]). Let . Suppose that the singular-value decomposition of the complex matrix is given by Then, the singular-value decomposition of the elliptic matrix is where
Lemma 4
([15]). Let and . Suppose that In this case, the least squares solution with the minimum norm of the elliptic matrix equation is given by
2.2. Elliptic Quaternions
An elliptic quaternion is denoted as , where , , , , , and . An elliptic quaternion is denoted in the following forms:
where
and
are elliptic numbers and and Clearly, , , and As a result, and are disjoint idempotent units.
The multiplication of the two elliptic quaternions and is defined by
The conjugate and norm of the elliptic quaternion are defined by and respectively [10].
An elliptic quaternion matrix is represented
where
and
are elliptic matrices, and . The multiplication of the two elliptic quaternion matrices and is defined by
The conjugate, transpose, conjugate transpose, and Frobenius norm of elliptic quaternion matrix are defined by , , and respectively [18,20].
Theorem 1
([15]). Let . Suppose that and are eigenvalues of elliptic matrices and corresponding to the eigenvectors and respectively. Then, is an eigenvalue of corresponding to the eigenvector .
Theorem 2
([15]). Let . Suppose that singular-value decompositions of and are and , respectively. Then, the singular-value decomposition of the elliptic quaternion matrix is given by where is hyperbolic matrix since and are real matrices ( is real matrix if and only if ). Moreover and are unitary matrices.
Corollary 1
([15]). Let and Then, the pseudoinverse of is , where and
Theorem 3
([15]). The least squares solution with the minimum norm of the elliptic quaternion matrix equation is where and .
3. MATLAB Toolbox for Elliptic Numbers and Elliptic Quaternions
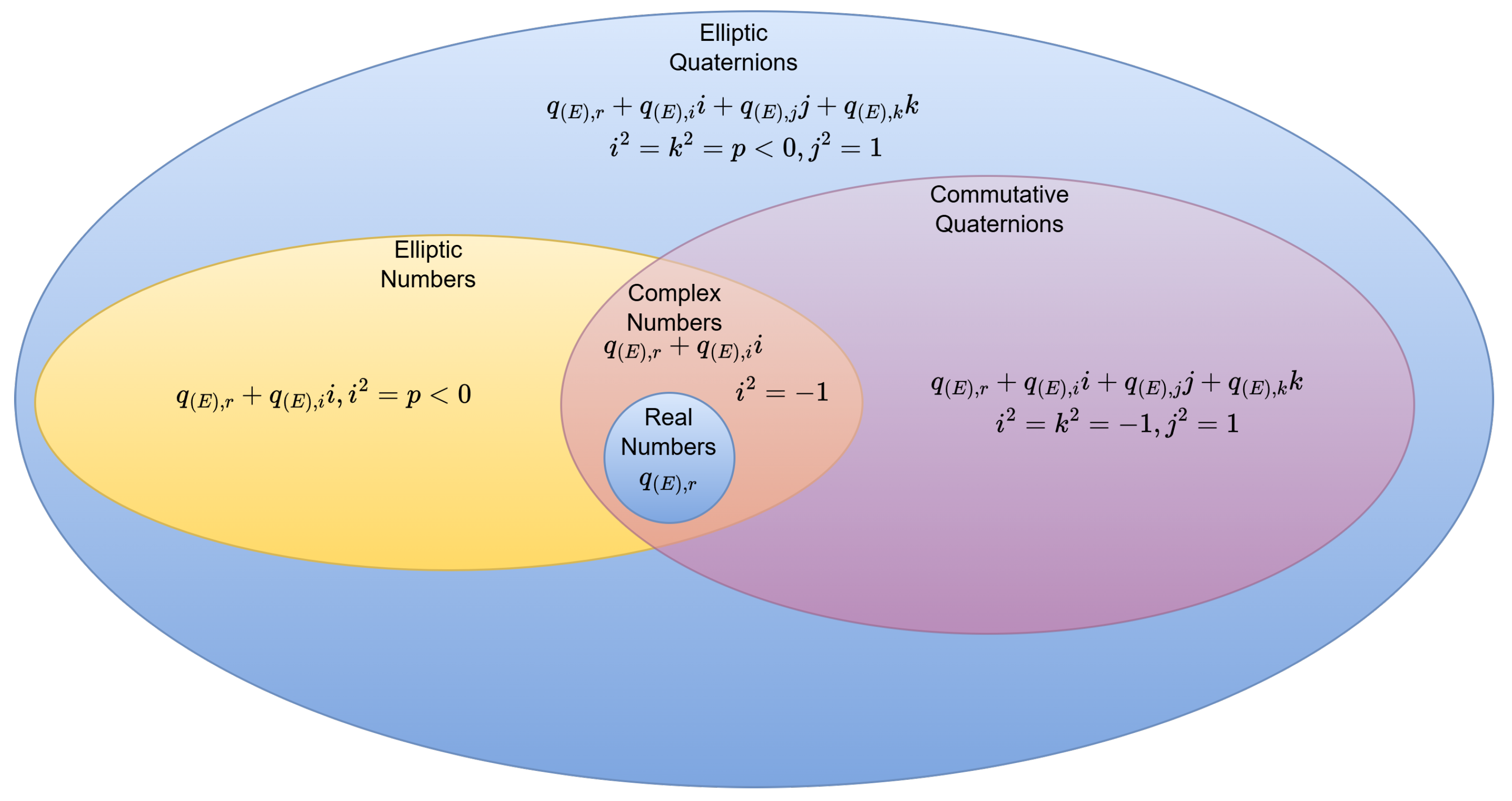
Elliptic numbers and elliptic quaternions are number systems that confer significant advantages in solving certain mathematical and physical problems. In this section, we introduce a MATLAB toolbox (version 0.1) developed to facilitate computations involving these systems. As illustrated in Figure 1, elliptic quaternions generalize elliptic numbers, reduced biquaternions (commutative quaternions), complex numbers, and real numbers, thereby providing a more expansive computational framework. This generalization enhances the versatility and applicability of the developed toolbox.
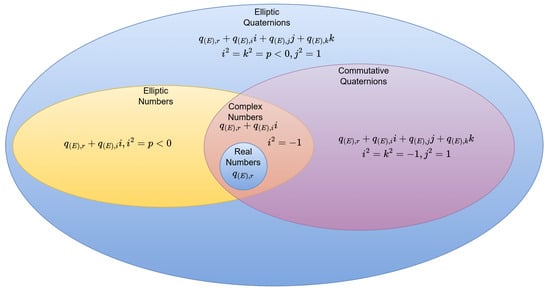
Figure 1.
The set of elliptic quaternions and the number sets it contains.
Table 1 and Table 2 show the signatures and their descriptions of the functions of the elliptic numbers and elliptic quaternions, respectively, in the toolbox.

Table 1.
Key functions of the elliptic numbers.
Table 2.
Key functions of the elliptic quaternions.
To enable the toolbox to process any elliptic number, the user must specify its real part, imaginary part, and the associated p-value. For example, to initialize the elliptic number and the elliptic matrix (initialized with random numbers) for , the functions in the Listing 1 should be invoke.
| Listing 1. MATLAB console output of the function elliptic_number(). |
 |
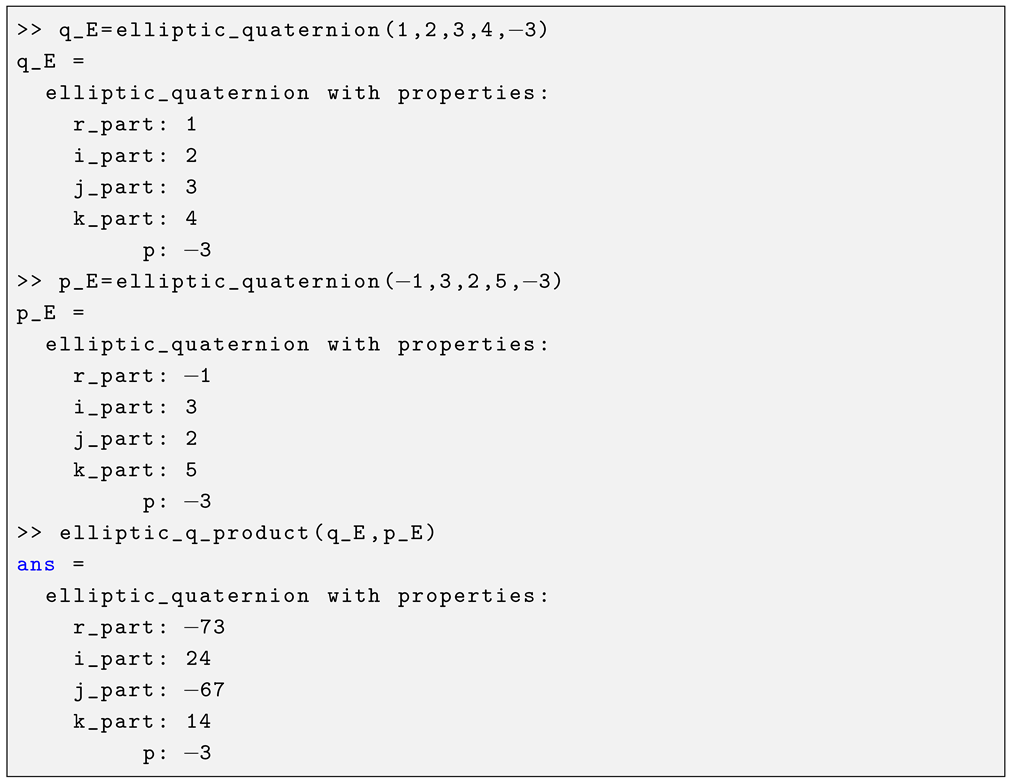
Initializing the elliptic quaternions and for and their multiplication is carried out as in the Listing 2:
| Listing 2. MATLAB console output of the functions elliptic_quaternion() and elliptic_q_product(). |
 |
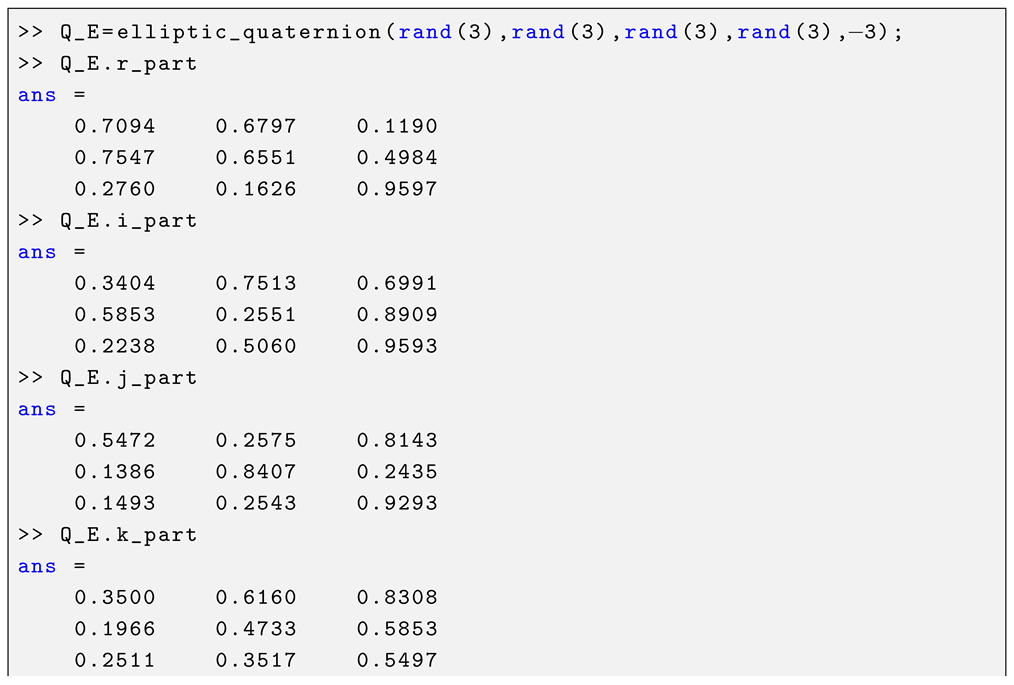
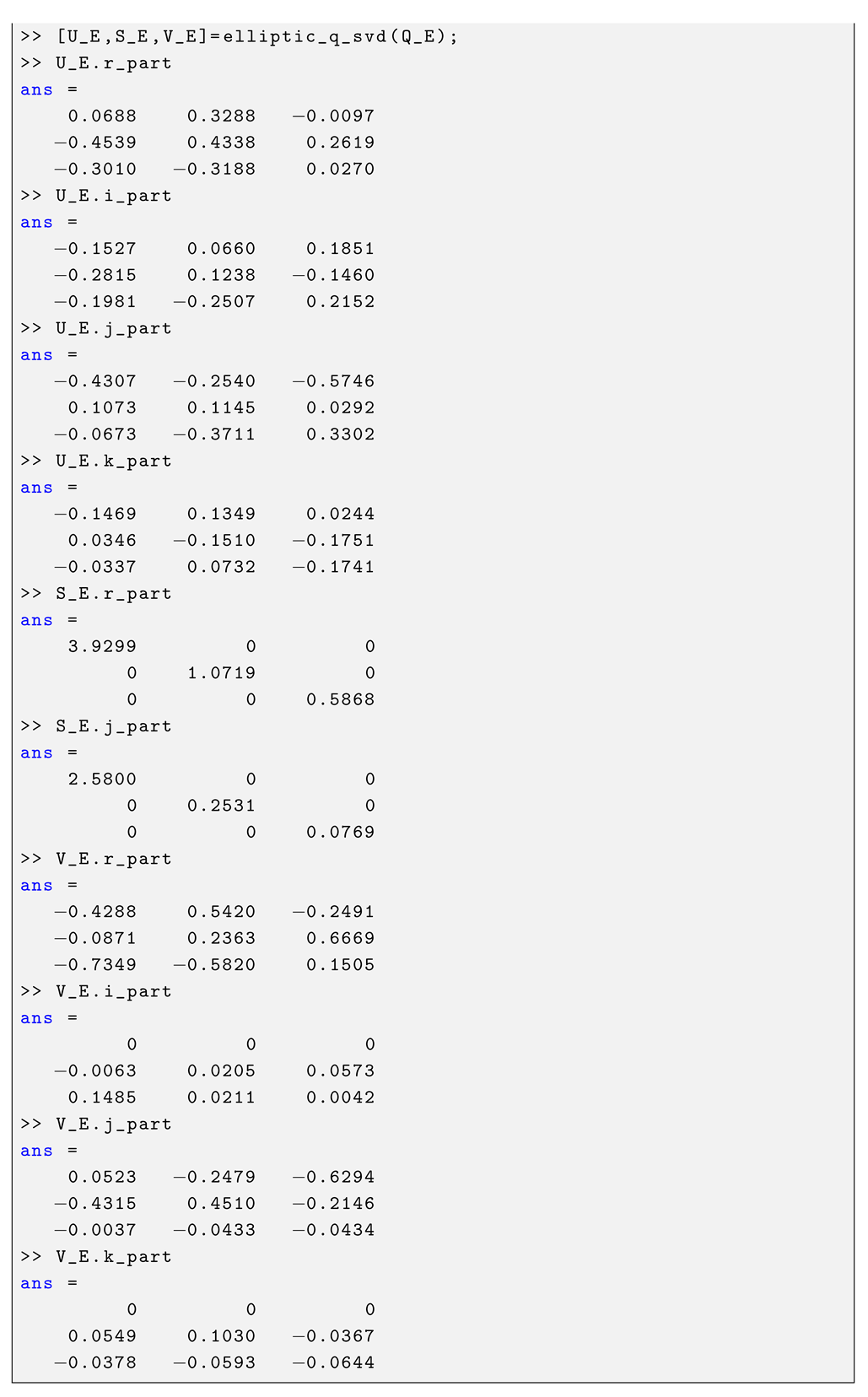
The singular-value decomposition of the elliptic quaternion matrix , initialized with random numbers for , is conducted as in the Listing 3:
| Listing 3. MATLAB console output of the functions elliptic_quaternion() and elliptic_q_svd(). |
  |
The minimum error and least squares solution of the matrix equation , where is initialized with random numbers for , are carried out as in the Listing 4:
| Listing 4. MATLAB console output of the functions elliptic_quaternion() and elliptic_q_lss(). |
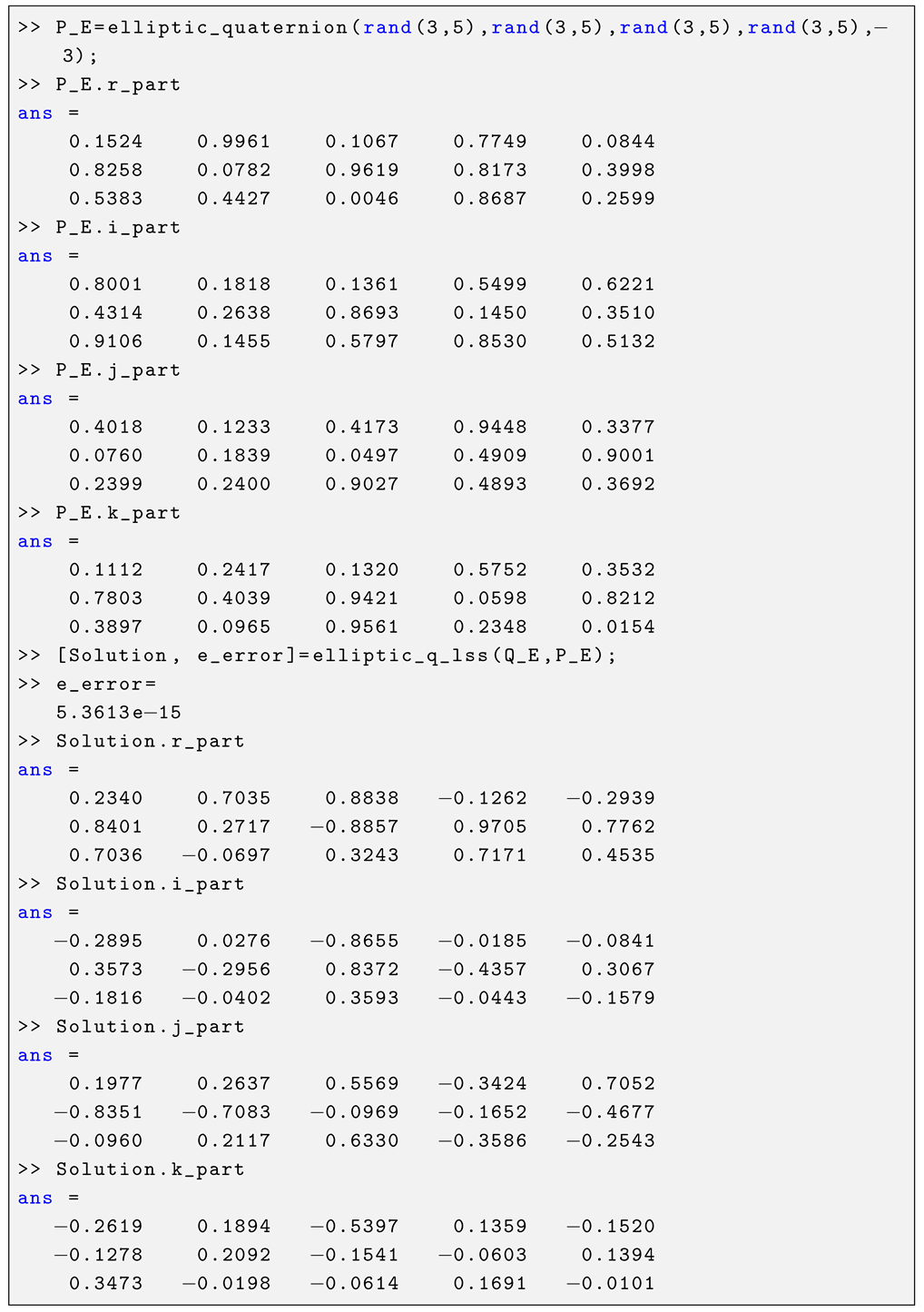 |
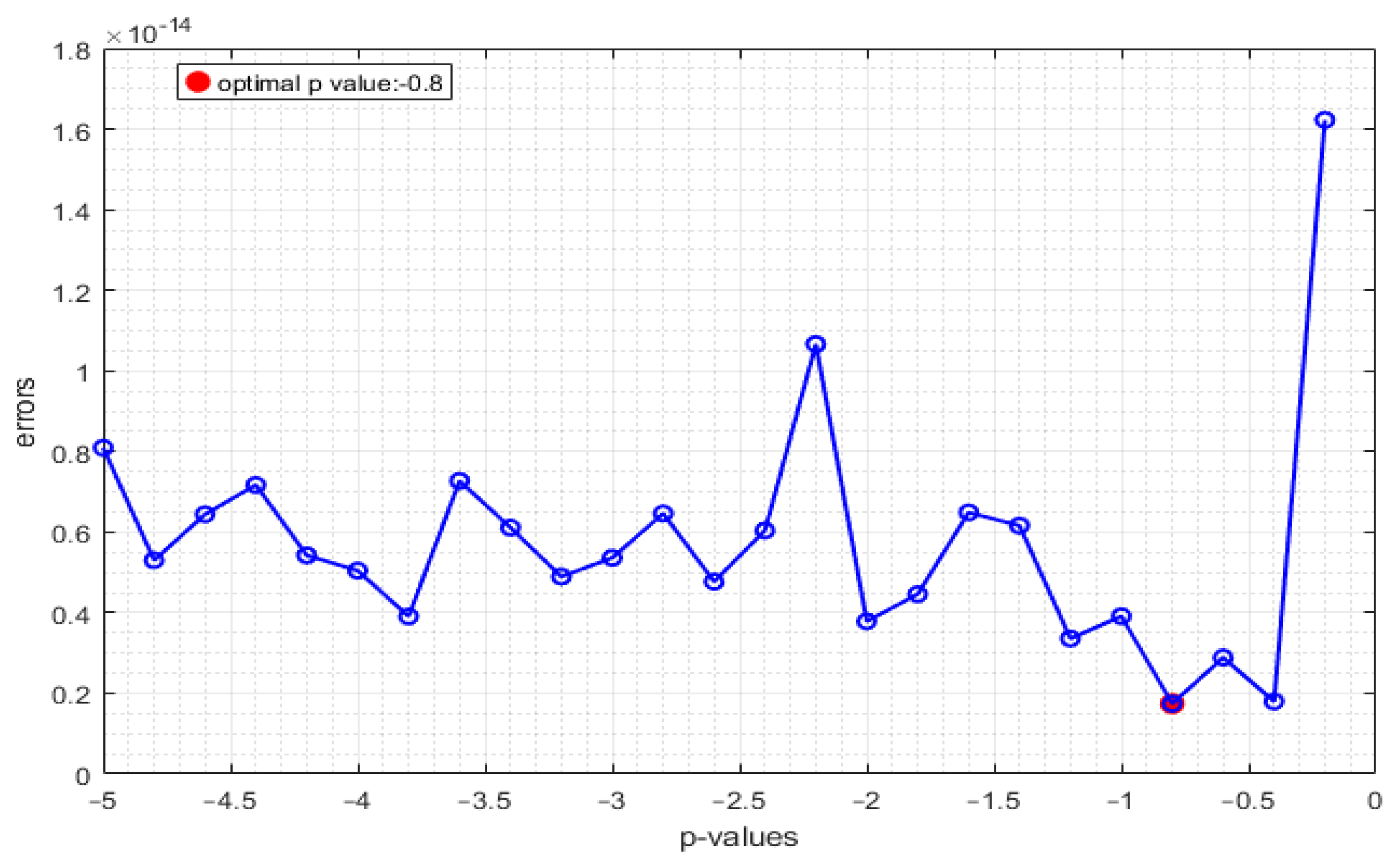
In the example above, the obtained minimum error value is 5.3613 × for . However, changing the value of p can further reduce the minimum error. Figure 2 shows the minimum errors corresponding to p-values of the range with a step size . The graph demonstrates that the minimum error 1.2057 × obtained for is smaller than the minimum error obtained for .

Figure 2.
Minimum errors of least squares solution of the matrix equation according to p-values.
In conclusion, the value of p in the elliptic quaternion space emerges as a critical hyperparameter that directly affects the solution to a problem addressed in this space. This finding highlights the significant role of selecting the appropriate p-value in solving any problem and emphasizes that it is a key factor in reducing the error rate. Therefore, optimizing the p-value is important in enhancing solution quality and achieving lower error rates.
4. Color Image Processing Using Singular-Value Decomposition of Elliptic Quaternion Matrices
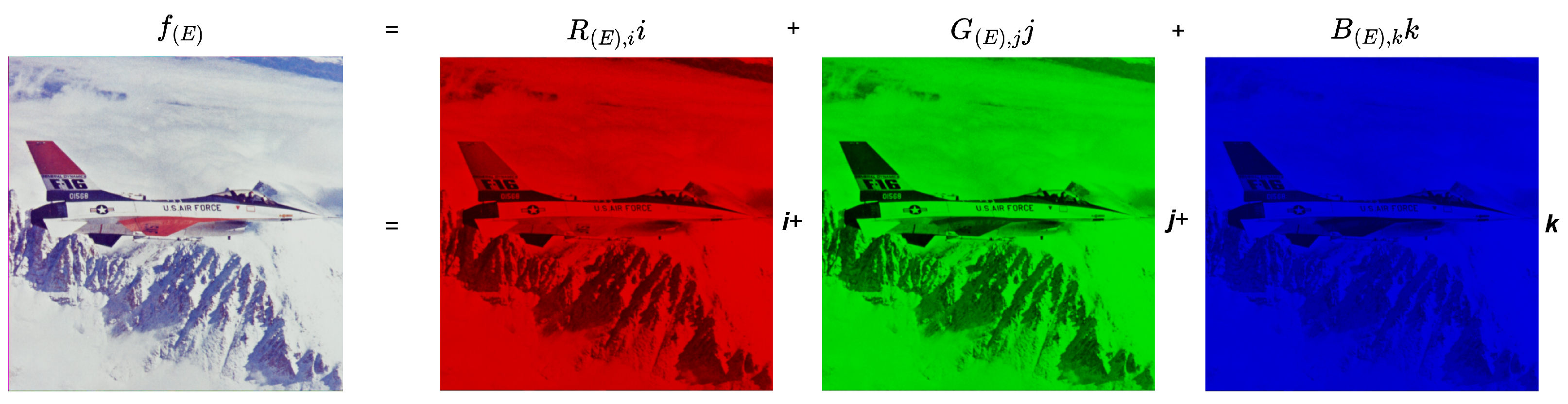
Elliptic quaternions are distinguished by their composition, comprising one real part alongside three imaginary counterparts. Within the realm of color imagery, particularly in the RGB color space framework, each pixel is constituted by three primary color components, namely red, green, and blue. By drawing an analogy from this, it can be postulated that each pixel within a color image can be analogously represented as a purely imaginary elliptic quaternion, wherein the real component is nullified. In such a representational schema, the red, green, and blue color components are analogically mapped to the i, j, and k components of the purely imaginary elliptic quaternions, respectively. By following this premise, it is possible to articulate that a color image, defined by a dimensional matrix of pixels, can be succinctly expressed through an elliptic quaternion matrix:
where the matrices , , and represent the red, green, and blue component matrices of a color image, respectively. This representation is visually illustrated in Figure 3 [18].
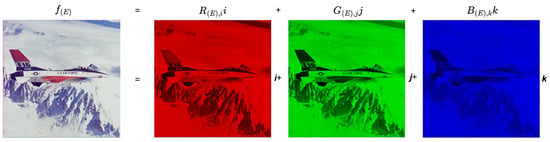
Figure 3.
Elliptic quaternion matrix representation of the color image airplane.png.
The signatures and descriptions of the image processing functions in the Toolbox are presented in Table 3. The experimental results in this work demonstrate that elliptic quaternion methods outperform other hypercomplex number-based approaches in image analysis and processing (Tables 4–8). The test images used in the experiments of the developed techniques are given in Figure 4. On the other hand, the p-value in the algebra of elliptic quaternions directly affects the performance of the problem modeled in this space (see Figures 11, 13 and 19). As a result, choosing the most appropriate elliptic quaternion space for the problem under consideration (choosing the p-value that gives the most optimal solution to the problem) and the elliptical behavior of many physical systems make this number system more advantageous in image processing. Therefore, incorporating the elliptic quaternion number system into image processing may solve various problems related to time, memory, and performance.
Table 3.
Key image processing functions in the toolbox.

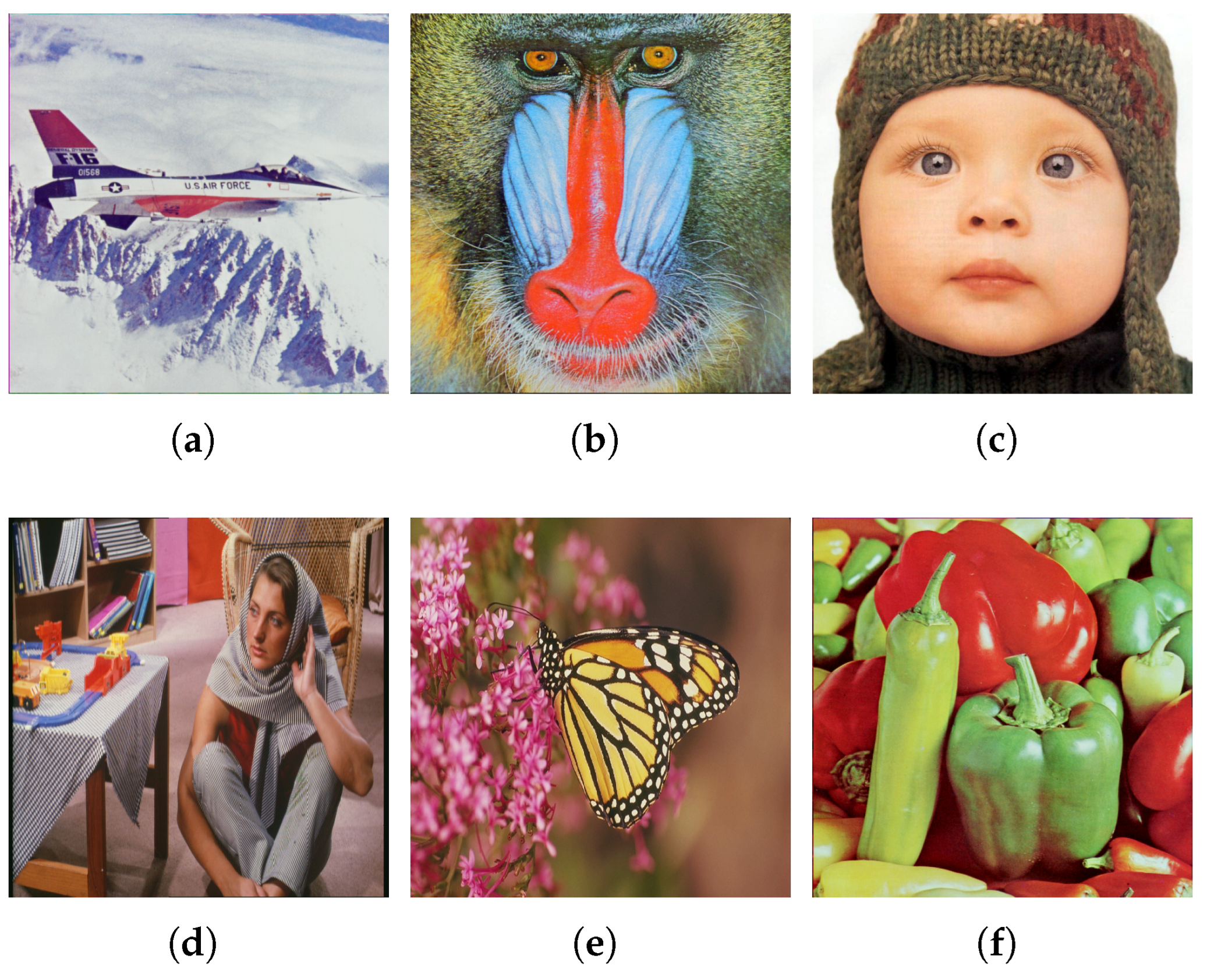
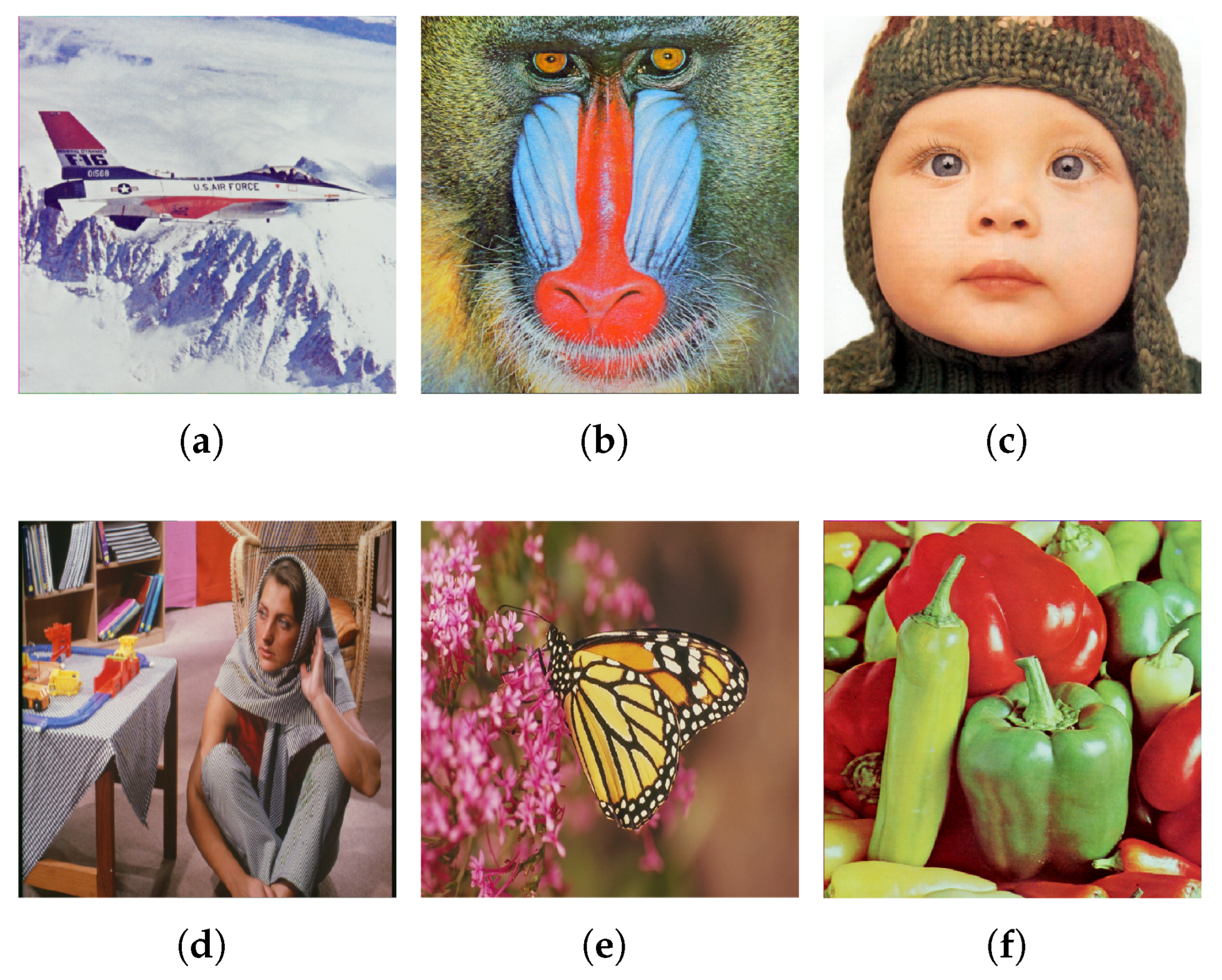
Figure 4.
All experimental test images: (a) airplane.png (), (b) baboon.png (), (c) baby.png (), (d) Barbara.png (), (e) monarch.png (), and (f) peppers.png ().
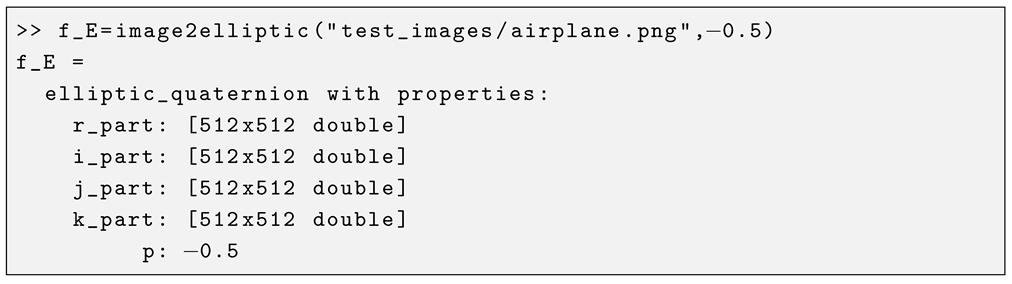
For , the elliptic quaternion matrix representation of the test image airplane.png with a resolution of pixels is obtained as in the Listing 5:
| Listing 5. MATLAB console output of the function image2elliptic(). |
 |
On the other hand, a color image can also be represented using elliptic quaternionic singular-value decomposition (ESVD) as
where the matrices and are unitary matrices and is a hyperbolic matrix. Various image processing techniques can be applied to a color image after applying ESVD without decomposing it into three-channel images. In the subsequent section, principal component analysis, image compression, image restoration, and watermarking techniques were applied to a color image using ESVD.
4.1. Eigenimages of Color Images
The ESVD of any color image can be expressed as
where and are elliptic quaternionic vectors, and R represents the rank of the elliptic quaternion matrix . Each term is called an elliptic quaternion-valued eigenimage of the image. Consequently, the color image can be thought of as a linear combination of R eigenimages. The first eigenimage, shown in Figure 5, of the test image baby.png is obtained with the function in Listing 6:
| Listing 6. MATLAB console output of the functions image2elliptic() and elliptic_q_eigenimage(). |
 |
Figure 5.
The first eigenimage of the test image baby.png.
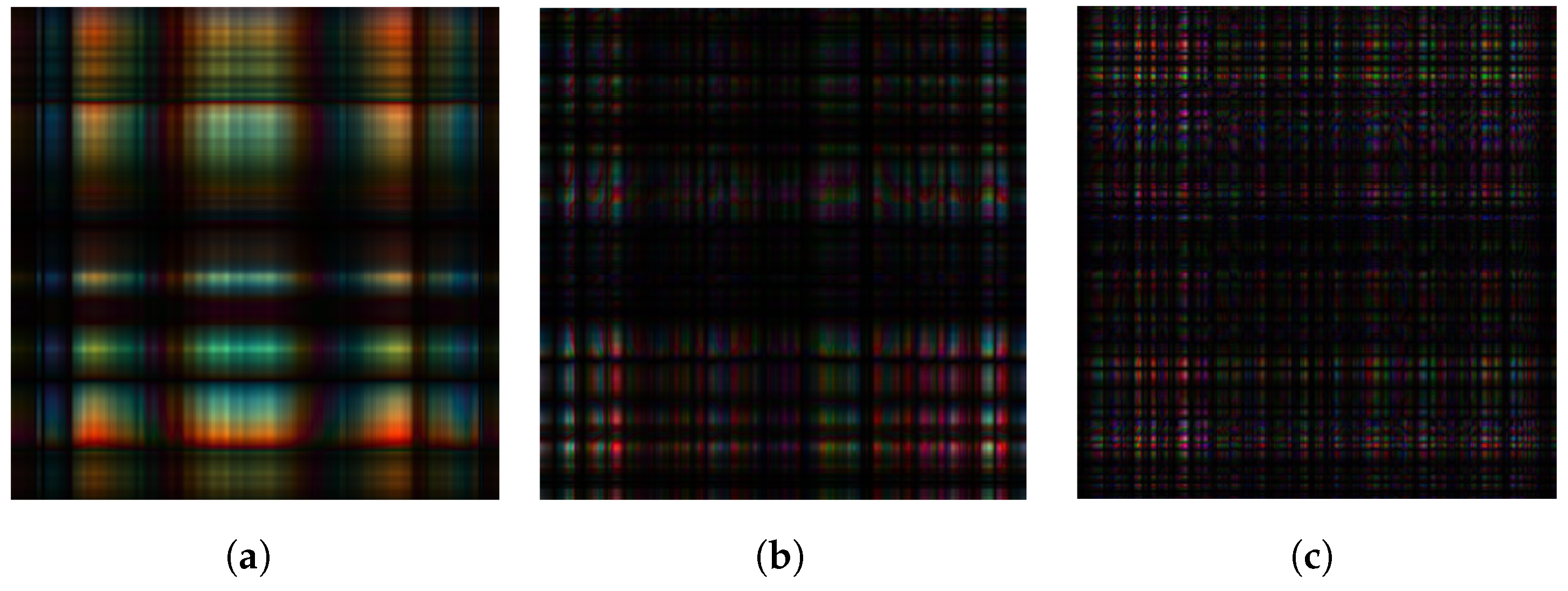
Moreover, normalized absolute versions of the third, tenth, and twenty-fifth eigenimages of the test image baby.png are also given in Figure 6.
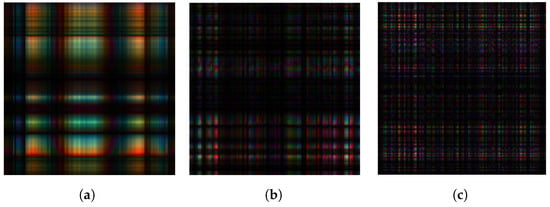
Figure 6.
Third, tenth, and twenty-fifth eigenimages of the test image baby.png. (a) . (b) . (c) .
As seen in Figure 6, the initial eigenimages correspond to the low-frequency components of the original image, capturing the broad, smooth variations and overall structure. In contrast, the subsequent eigenimages represent the high-frequency components, which detail the finer, more intricate features and textures. This distinction between low- and high-frequency components allows for a more subtle analysis and manipulation of the image data.
4.2. Color Image Compression with ESVD
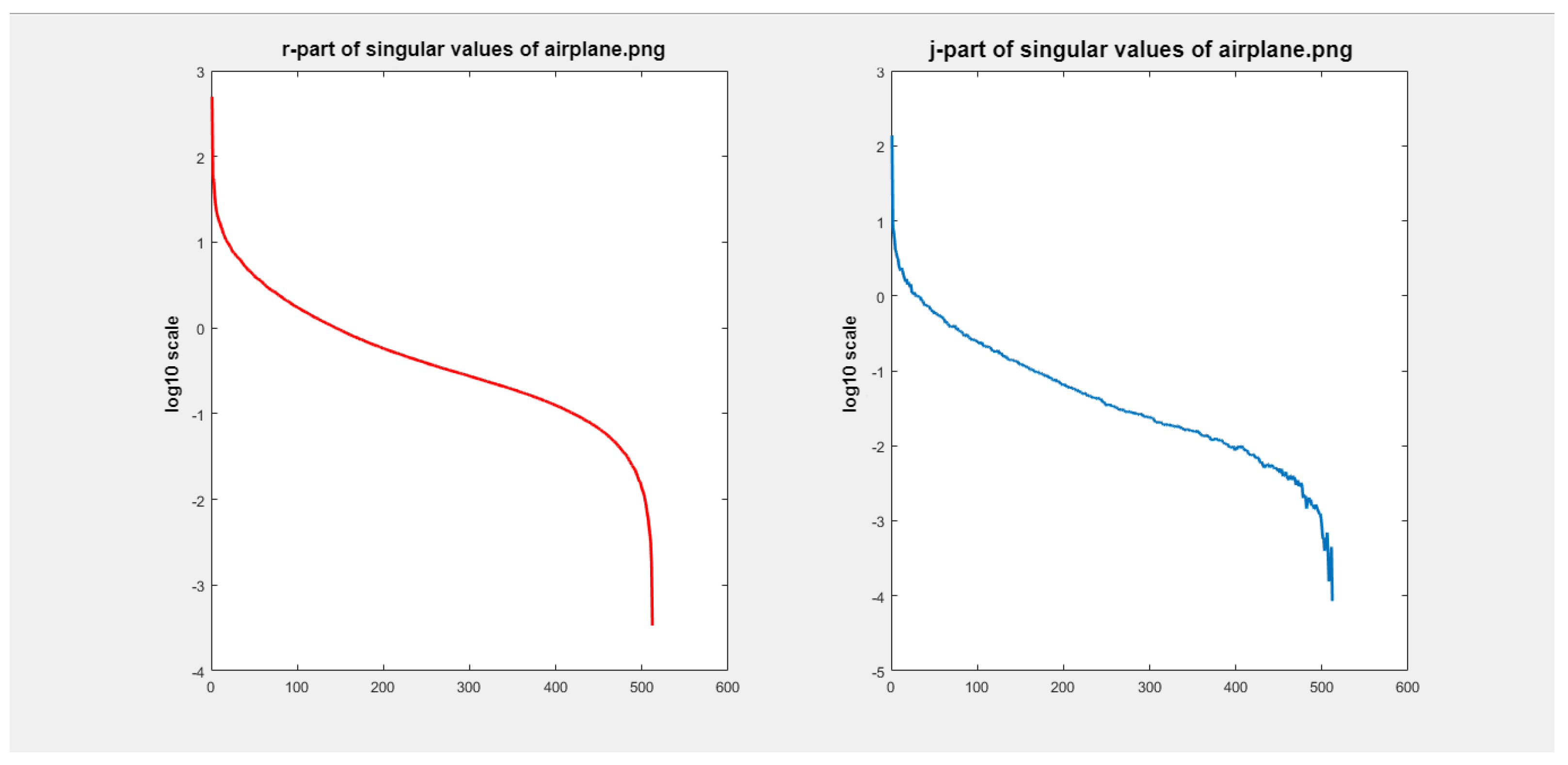
When color images are represented as illustrated in Equation (1), the variation in their singular values can be examined using the function provided in Listing 7. The graph depicted in Figure 7, generated by the function elliptic_q_singularvalues(), demonstrates the variation of the singular values for the test image airplane.png:
| Listing 7. MATLAB console output of the functions image2elliptic() and elliptic_q_singularvalues(). |
 |

Figure 7.
Graphs of singular values of the test images airplane.png.
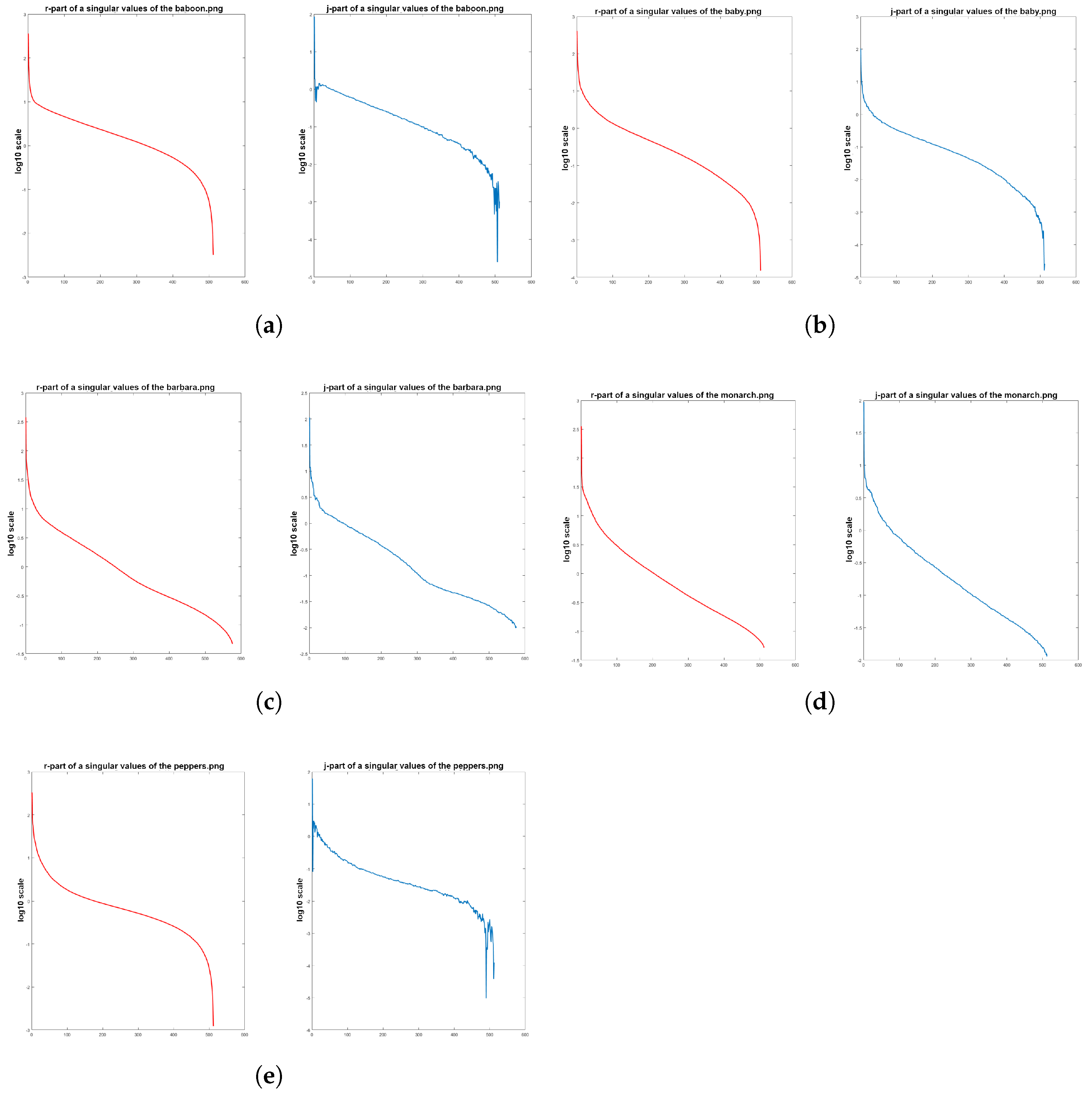
The graphs of singular values of other test images for are shown in Figure 8:

Figure 8.
Graphs of singular values of test images: (a) baboon.png, (b) baby.png, (c) Barbara.png, (d) monarch.png, and (e) pepper.png.
As seen in Figure 7 and Figure 8, the singular values of test images decrease very rapidly. Therefore, even for small values of K satisfying , a good approximation of a color image can be achieved. To approximate the matrix in Equation (1) for , the equation
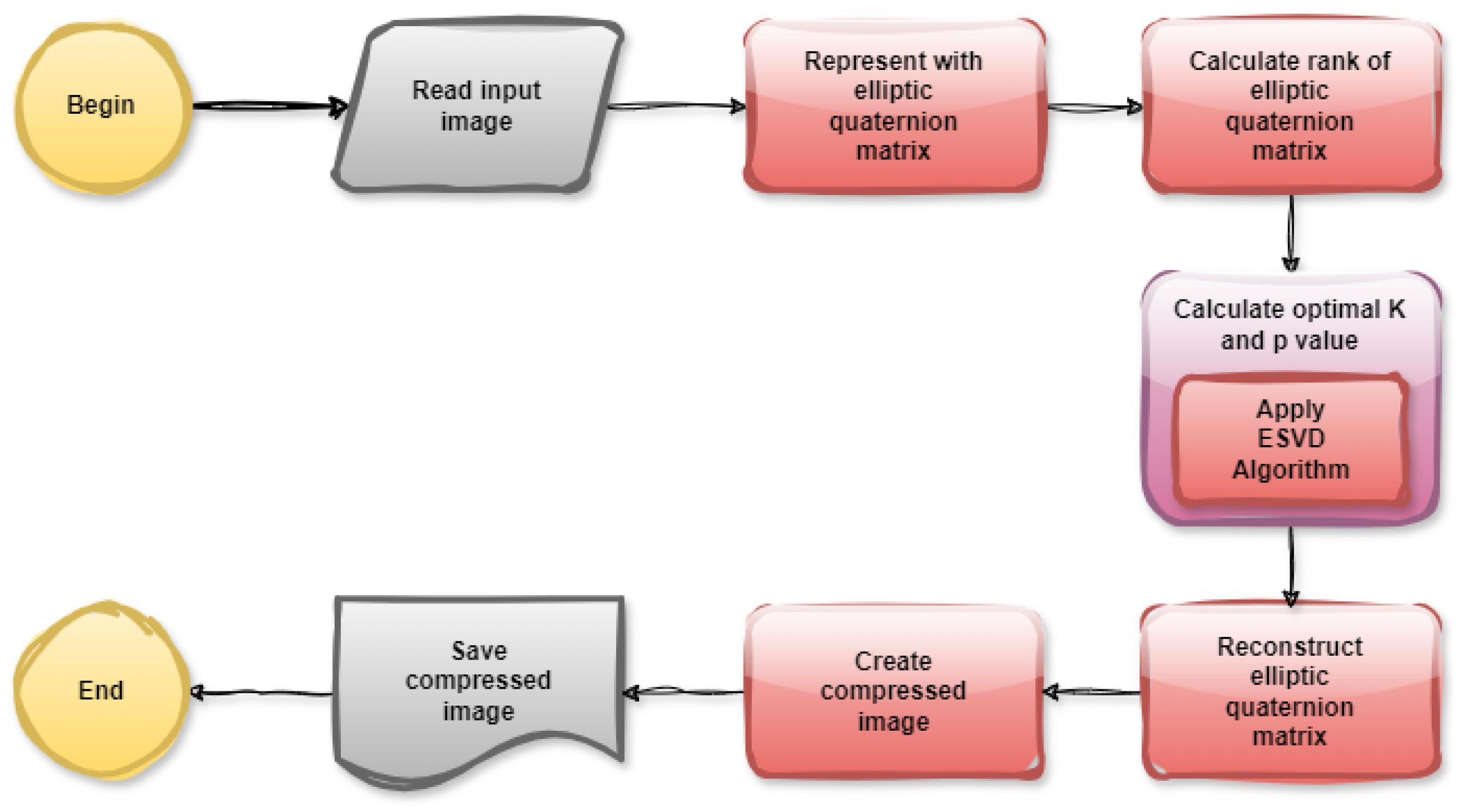
can be used. In this case, the storage space required to store a color image reduces from to . The steps for image compression with ESVD are provided in Figure 9:
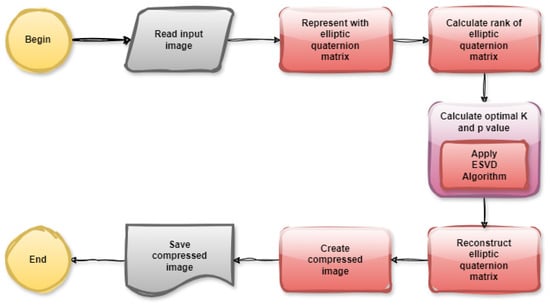
Figure 9.
Flowchart of image compression using ESVD.
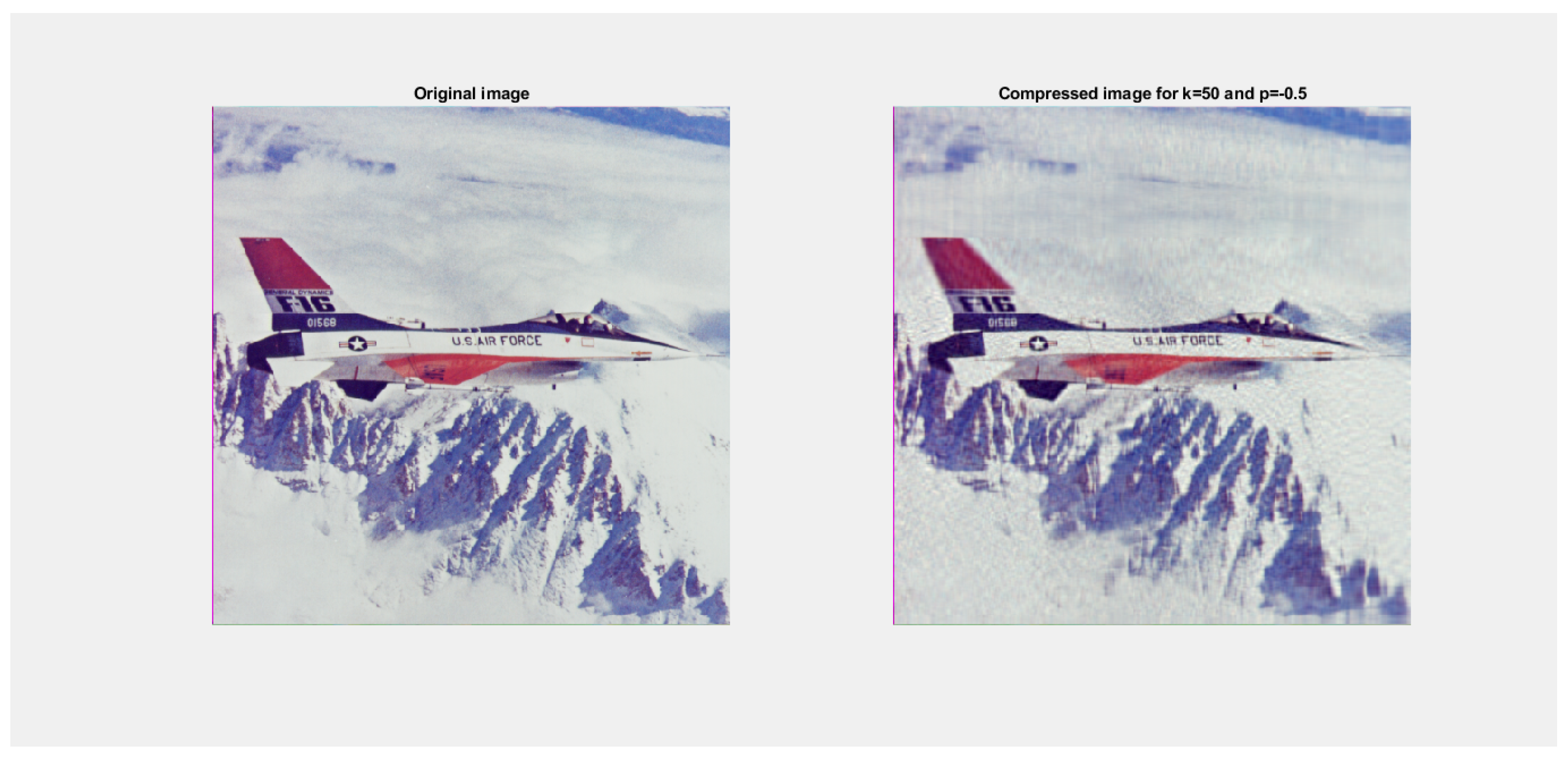
The function in Listing 8 reconstructs the test image airplane.png for and . Figure 10 shows the original image airplane.png and the compressed version side-by-side.
| Listing 8. MATLAB console output of the function elliptic_q_image_reconstruction(). |
 |

Figure 10.
PSNR and MSE results of the reconstruction of the test image airplane.png for and : PSNR = 30.4527; MSE = 9.0100 × .
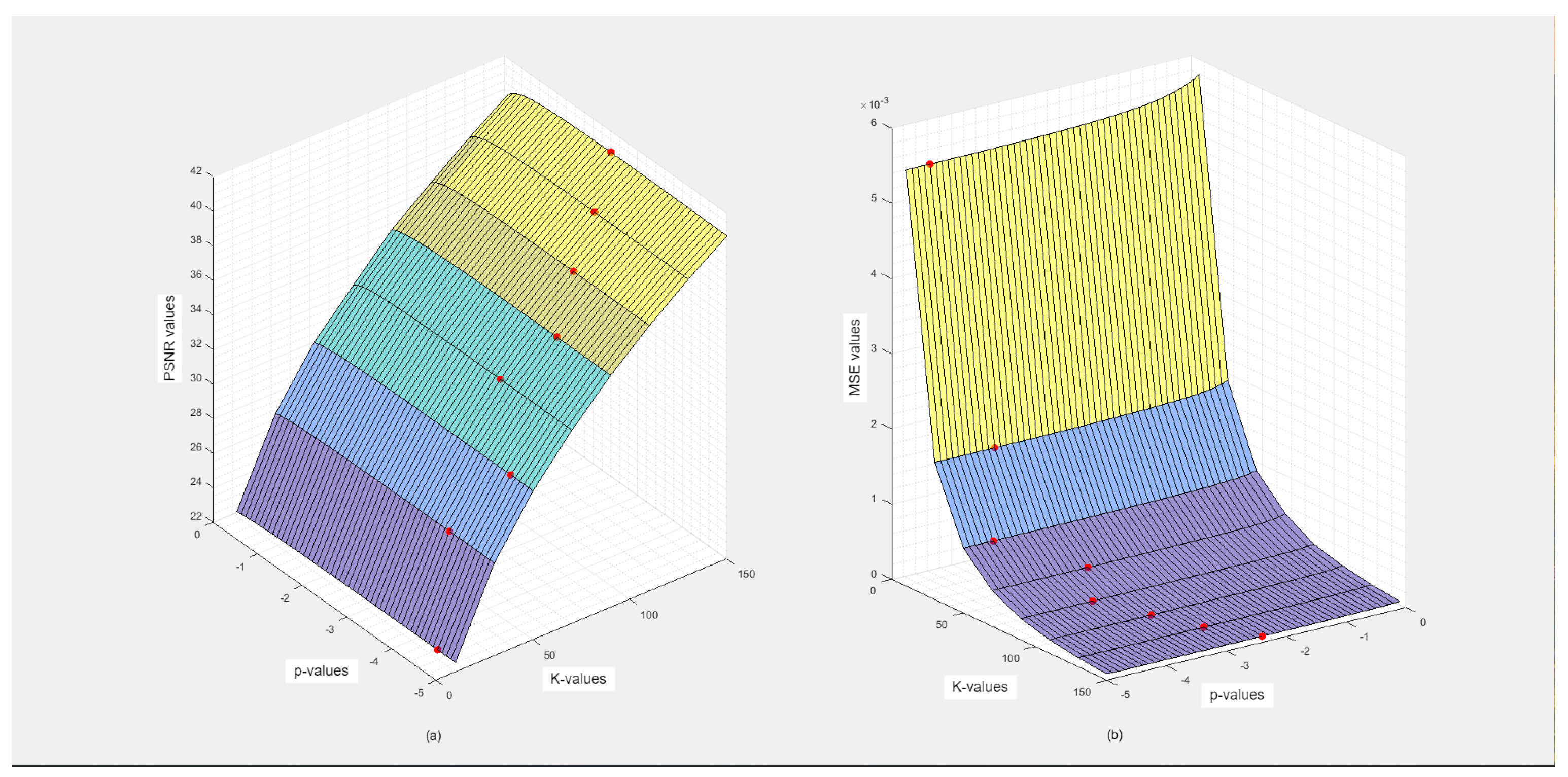
The functions in Listing 9 draw surfaces, which are represented in Figure 11, showing the PSNR (peak signal-to-noise ratio) and MSE (mean squared error) values corresponding to each K and p-value of the test image airplane.png for and . The red dots indicate optimal p-values.
| Listing 9. MATLAB console output of the functions elliptic_q_optimal_p_for_psnr() and optimal_p_for_mse(). |
 |

Figure 11.
Optimal p-values for PSNR and MSE for the test image aiplane.png.
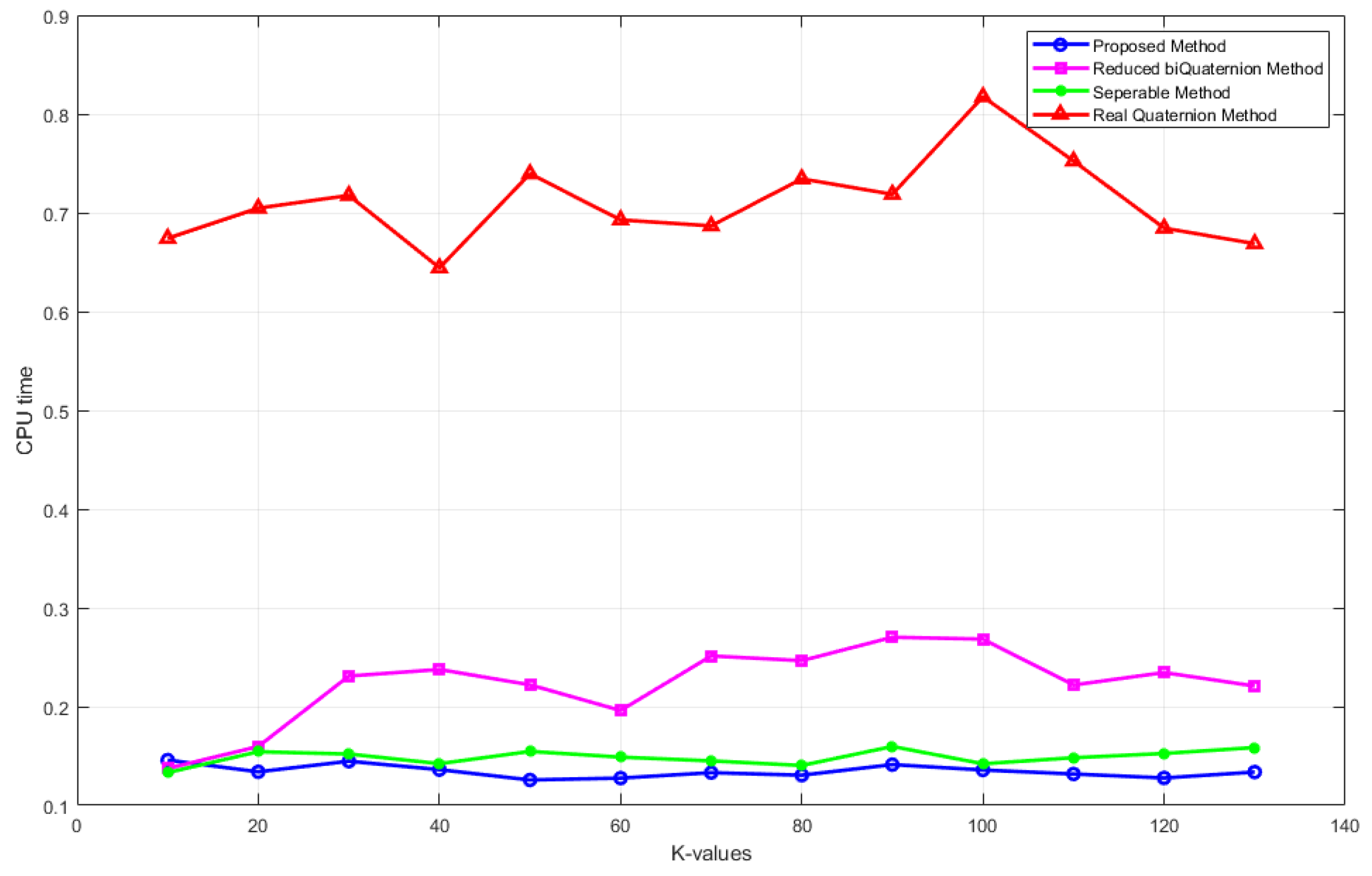
The run time comparison of the proposed ESVD compression method along with the Separable method (compression method obtained by applying singular-value decomposition separately to R, G, and B components) and hypercomplex-based compression methods, such as QSVD (performs singular-value decomposition on real quaternion matrices [21]) and RBSVD (performs singular-value decomposition on reduced biquaternion matrices [22]), on the test images are provided in Figure 12.

Figure 12.
Run time comparison of the methods: Separable, QSVD, RBSVD, and ESVD (proposed method) on the test image airplane.png.
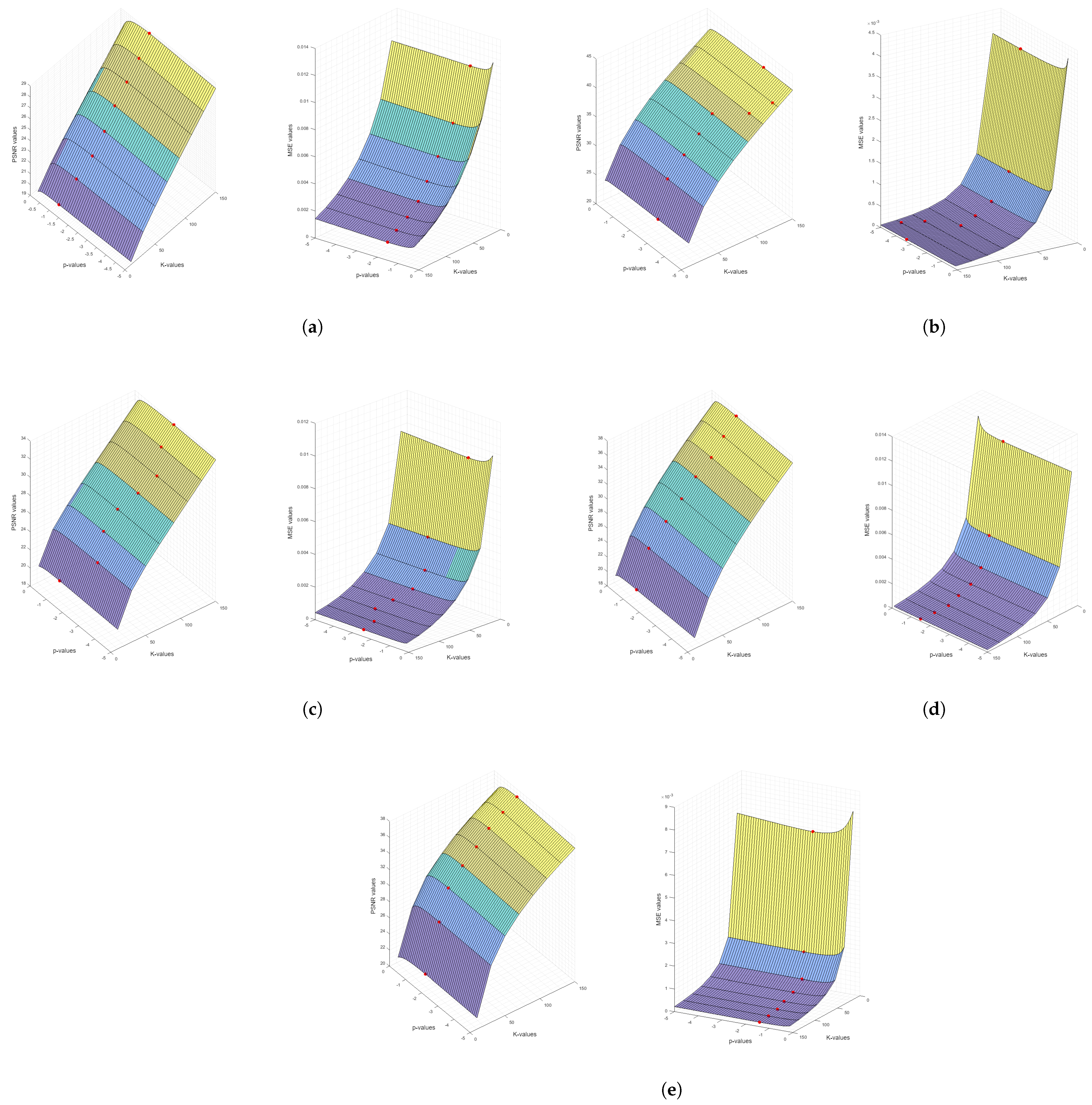
The PSNR and MSE values of all other test images according to the given K and p-values are given in Figure 13.

Figure 13.
Optimal p-values for the PSNR and MSE values of the test images: (a) baboon.png, (b) baby.png, (c) Barbara.png, (d) monarch.png, and (e) pepper.png.
The PSNR and MSE values of the proposed ESVD compression method, along with the Separable method and hypercomplex-based compression methods, such as QSVD and RBSVD, on the test images are provided in Table 4 and Table 5.
Table 4.
Compression results (PSNR) of Separable, QSVD, RBSVD, and ESVD (proposed method) methods on the test images.
Table 5.
Compression results (MSE) of Separable, QSVD, RBSVD, and ESVD (proposed method) methods on the test images.
4.3. Color Image Restoration with ESVD
Image restoration is a significant concept in the field of image processing. It entails the estimation of a desired, enhanced image from its degraded version. By utilizing prior knowledge of the degradation phenomena, image restoration techniques aim to remove or reduce degradations introduced during image acquisition—such as noise, pixel value errors, out-of-focus blurring, or camera motion blurring. Generally, the degradation process of an image is nonlinear and spatially variant. However, in applied sciences, this process is often considered linear and spatially invariant, allowing it to be examined using the linear shift invariant (LSI) image restoration model [23].
For an LSI system, f is the original image, g is the observed image, H is the point spread function (PSF) of the imaging system, and n is the additional noise; the following matrix-vector formula expresses the process of image degradation: . Image restoration methods attempt to construct an approximation to f from the observation . The method of least squares estimator minimizes the sum of squared differences between the real observation g and the predicted observation The function to be minimized can be equivalently written as in matrix-vector notation [23].
Since the color image can be represented by the elliptic quaternion matrix, the image restoration problem is transformed into the elliptic least squares problem of the elliptic quaternion matrix equation . As a result, this subsection will present an image restoration model, referred to as ESVD-LSI, based on the singular-value decomposition theory of elliptic quaternion matrices.
In our simulation, Gaussian blur PSFs are employed. Gaussian blur is one of the most prevalent types of blurring that degrades images. It depends on two parameters: the kernel size (hsize) and the standard deviation sigma () of the Gaussian function in MATLAB. The kernel size determines the dimensions of the pixel area considered during the application of the filter, while the sigma value dictates the amount of blurring; higher sigma values produce a more pronounced blurring effect. These parameters are utilized to simulate the effect of an out-of-focus image or to smooth fine details. The simulation steps are as follows:
- Step 1: An experimental test image is acquired for the ESVD-LSI image restoration method.
- Step 2: PSF is selected manually.
- Step 3: The range of p and step size are selected.
- Step 4: A degraded image is obtained.
In the backend coding, we denote the image matrix of the input image as f. In this case, the elliptic quaternion matrix representation matrix of f is . The image matrix was degraded with the 2-D Gaussian blur (hsize = 15, = 1) PSF H to obtain the degraded image matrix Let . In this case, with the help of , we obtain the elliptic quaternion representation of the degraded image in the form of .
- Step 5: According to Theorem 3, the least squares solution with the minimum norm of the elliptic quaternion matrix equation is
- Step 6: By using the step size and the range of p, the optimal p-value is obtained.
- Step 7: Finally, the enhanced image is obtained by reverse sampling from the elliptic quaternion matrices, which will be obtained by choosing the optimal p-value that makes the least squares error the smallest for .
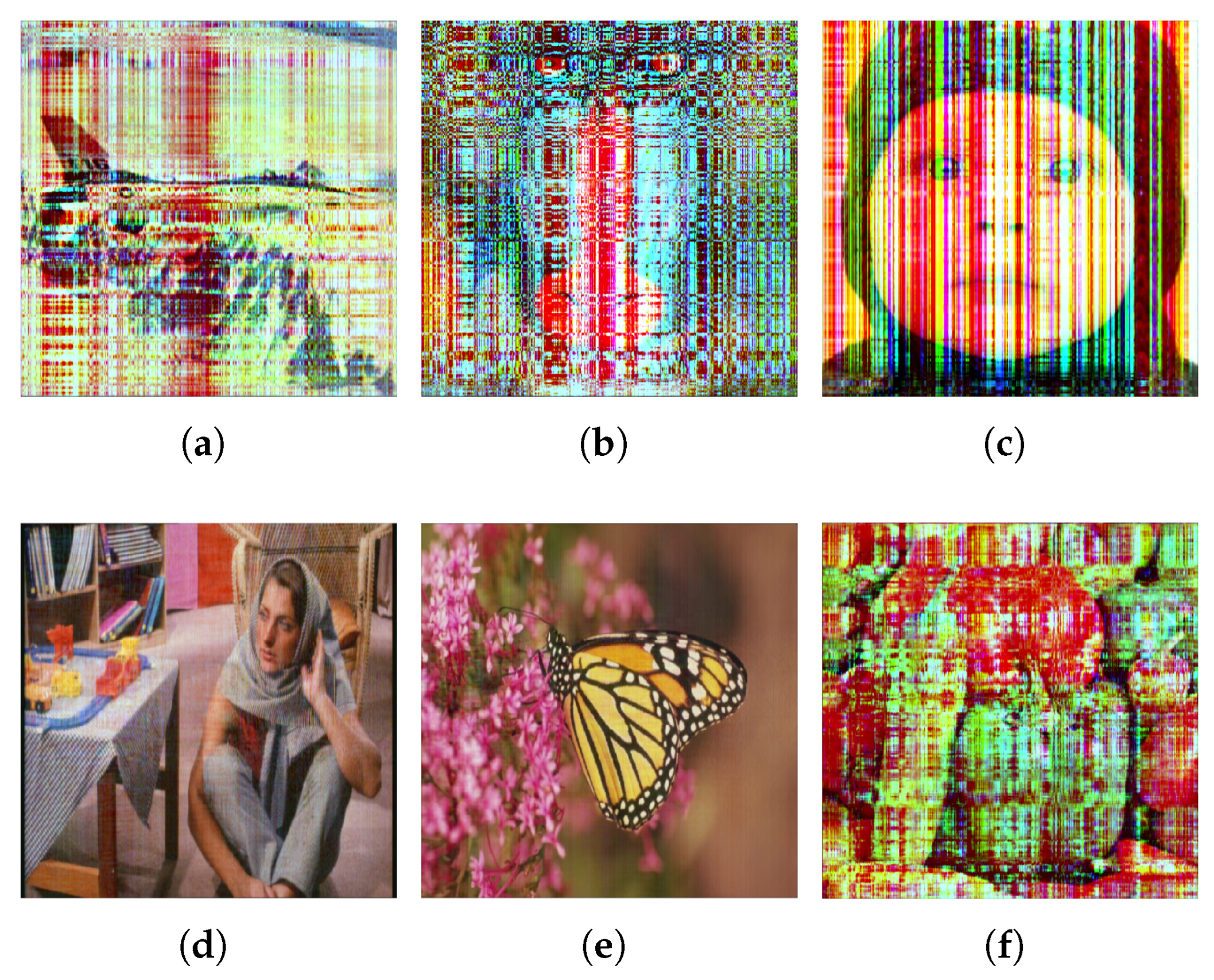
For the results of the simulation system, the test images are degraded according to the instructions in Step 4 for 2-D Gaussian blur (hsize = 15 and = 1). The degraded images are shown in Figure 14.
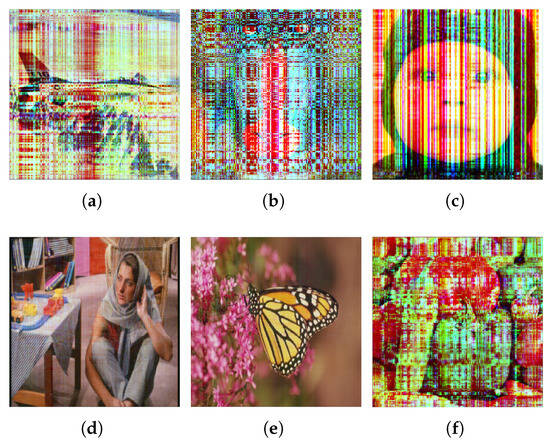
Figure 14.
Degraded Images: (a) airplane.png, (b) baboon.png, (c) baby.png, (d) Barbara.png, (e) monarch.png, and (f) peppers.png.
After steps 5, 6, and 7, the restored test images according to optimal p-values are given in Figure 15.

Figure 15.
Restored images: (a) airplane.png, (b) baboon.png, (c) baby.png, (d) Barbara.png, (e) monarch.png, and (f) peppers.png.
The least squares errors of the QSVD-LSI and RBSVD-LSI restoration methods using the ESVD-LSI restoration method on the test images are provided in Table 6.
Table 6.
Comparison of the least squares errors of QSVD-LSI, RBSVD-LSI, and ESVD-LSI (proposed method) on test images.
4.4. Color Image Watermarking with ESVD
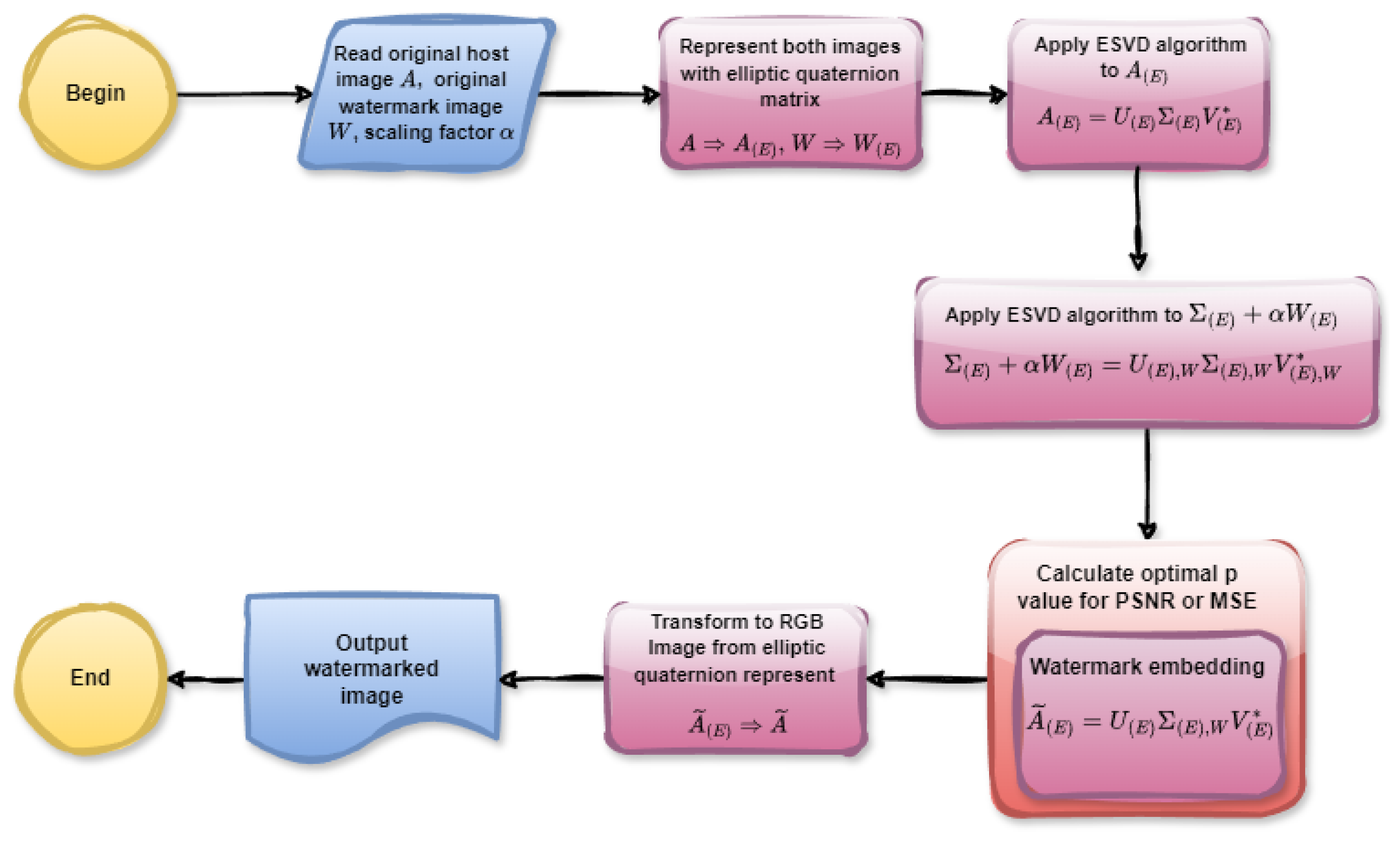
Watermarking is a crucial technique in the field of digital image processing, used extensively for copyright protection, authentication, and data integrity verification. By embedding a watermark into a digital image, one can ensure the traceability and rightful ownership of the content. This technique finds applications in various domains, including media, healthcare, and secure communications. According to the algorithm in [24], we can give a similar algorithm for color image watermarking by using elliptic quaternion matrix algebra. The flowcharts in Figure 16 and Figure 17 illustrate the elliptical quaternion matrix-based color image watermark embedding and extraction procedures, respectively.

Figure 16.
The flowchart of watermark embedding.

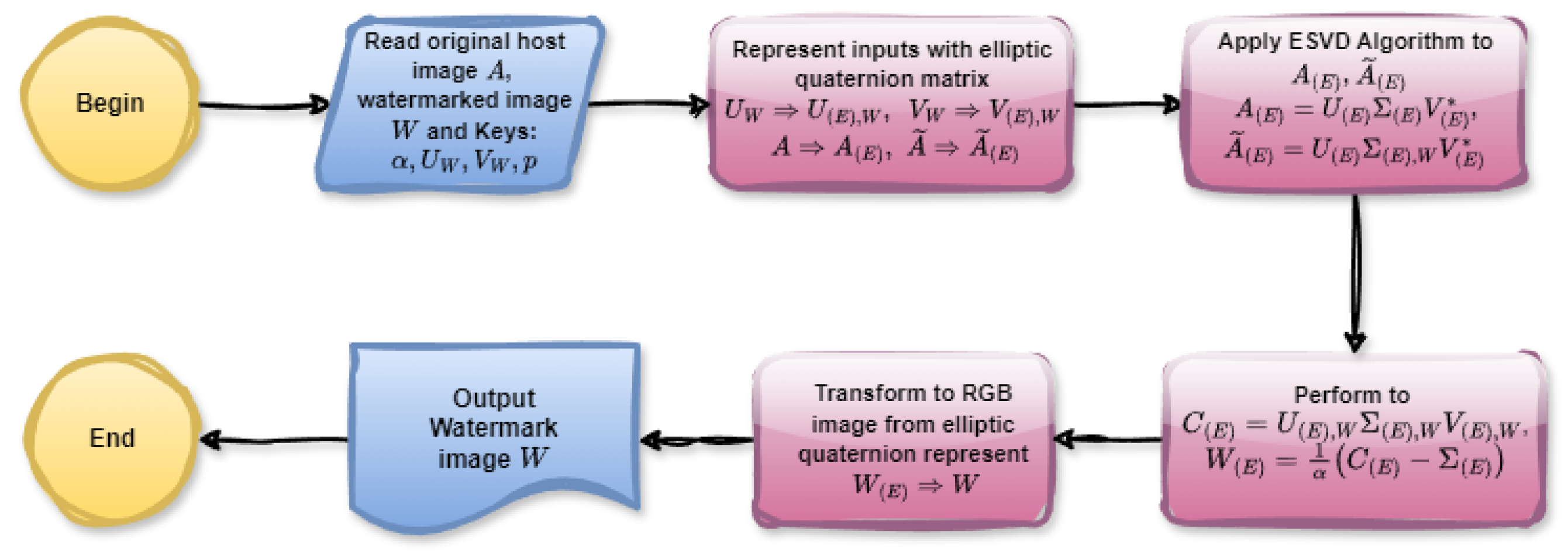
Figure 17.
The flowchart of watermark extracting.
The watermark image sau.png in Figure 18b is embedded in the host image airplane.png via the function elliptic_q_embedding_watermarking() as represented in Listing 10
| Listing 10. MATLAB console output of the functions image2elliptic() and elliptic_q_embedding_watermarking(). |
 |

Figure 18.
(a) Host image; (b) watermark image; (c) watermarked image.
With the parameters and . The watermarked image is as in Figure 18c. The PSNR and MSE values between the host and the watermarked images are and , respectively.
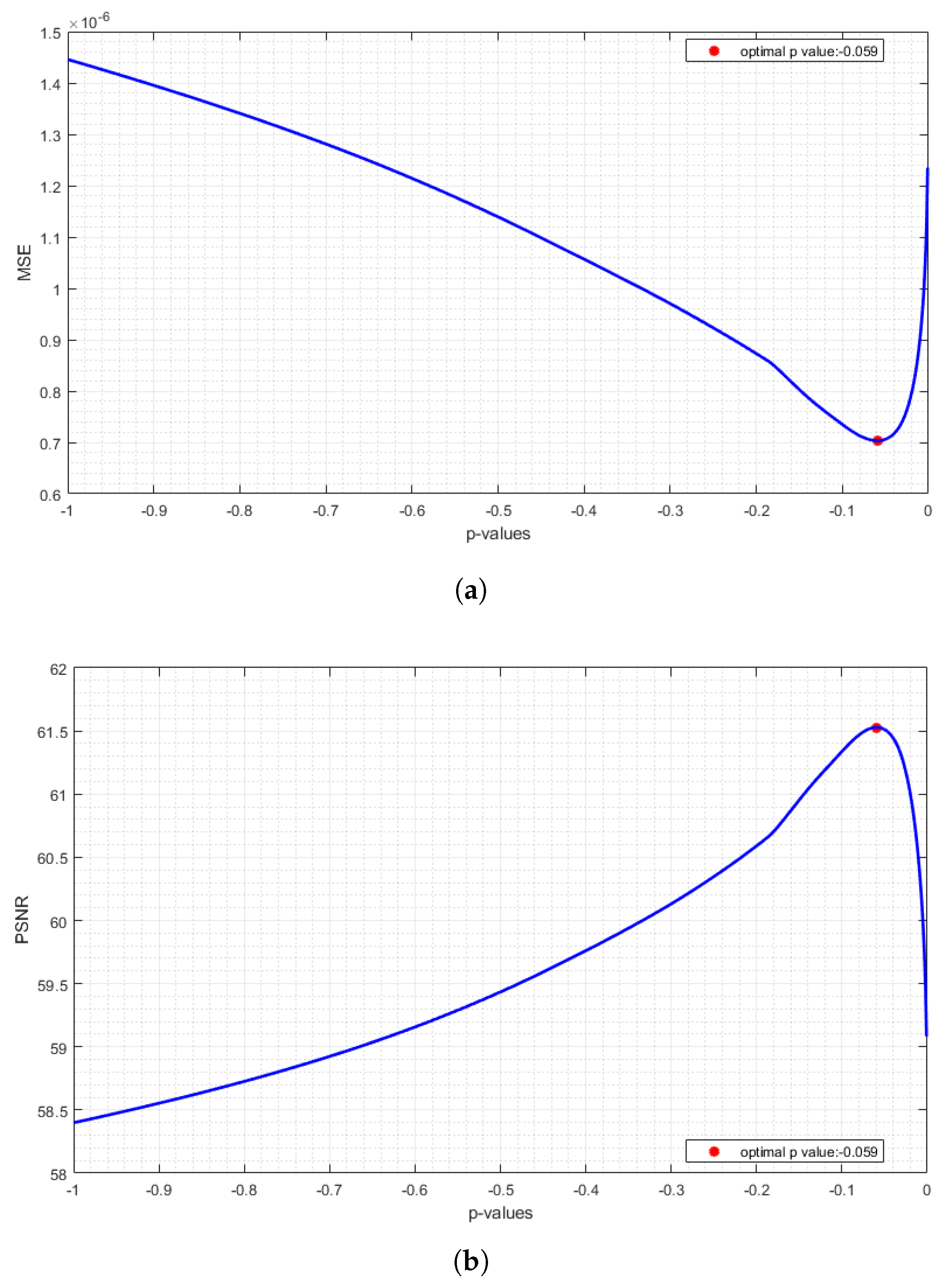
Figure 19 shows the MSE and PSNR values between the host image and a watermarked image corresponding to p-values given in the range of with a step size of (). According to the graphs, the least MSE is , and the maximum PSNR is for the optimal .
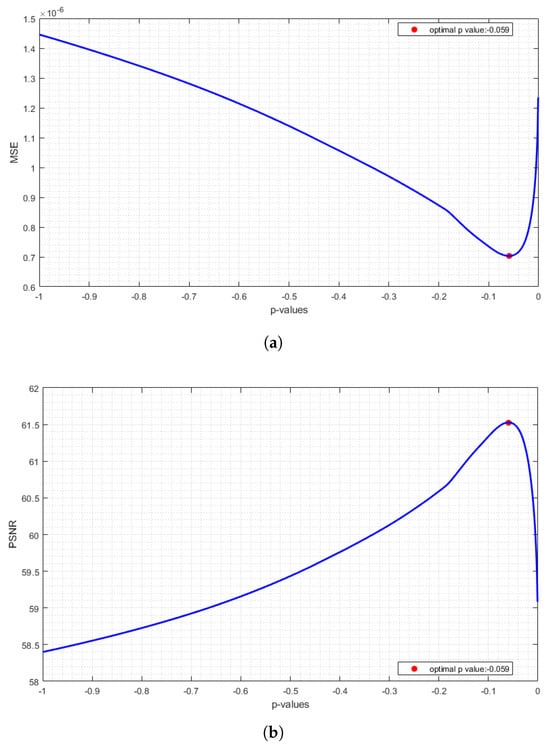
Figure 19.
Change in the MSE (a) and PSNR (b) values between the host image and a watermarked image according to p-values.
A comparison of the watermarking methods based on Separable, QSVD, RBSVD, and ESVD in terms of PSNR and MSE on test images are given in Table 7 and Table 8. The proposed method demonstrates better performance than the other approaches.
Table 7.
PSNR comparison for the watermarking methods based on Separable, QSVD, RBSVD, and ESVD on the test images.
Table 8.
MSE comparison for the watermarking methods based on Separable, QSVD, RBSVD, and ESVD on the test images.
To evaluate the robustness of the proposed watermarking scheme, several attacks, including adding 2% Gaussian noise, cropping one-fourth of the upper-left area of the watermarked image, sharpening, and their sequential application, were performed. The robustness of the watermarking scheme was evaluated using the MSE between the extracted and original watermarks. Table 9 shows the results of the watermarked images for the test images after different attacks. From Table 9, it can be seen that the MSE error values are very small. This result demonstrates the robustness of the proposed scheme against attacks. The watermarks shown in Figure 20 were obtained from the test image airplane.png as a result of the attacks we considered.
Table 9.
Results of the MSE of the extracted watermark after different attacks.

Figure 20.
The extracted watermarks from the test image airplane.png: (a) Noise, (b) Cropping, (c) Noise + Cropping, (d) Sharpening, (e) Noise + Sharpening, and (f) Noise + Cropping + Sharpening.
5. Conclusions
In color image processing, conventional sparse matrix models employed for representing color images often neglect the interdependencies among the three distinct color channels RGB. Consequently, in numerous image processing tasks, these channels are either processed separately, or the image is converted to grayscale. Such an approach can significantly limit the effectiveness of various image processing techniques, particularly those that rely on the complex interactions of color data. In this study, we applied various color image processing techniques—including principal component analysis, image compression, image restoration, and watermarking—directly to color images represented in the elliptic quaternion algebra without decomposing them into separate RGB channels. These methods were integrated into the MATLAB toolbox developed for this purpose. Extensive experiments were conducted on image compression, reconstruction, image restoration, and watermarking. A comparative performance analysis between the proposed method and other hypercomplex-based compression techniques demonstrated that our method outperformed existing approaches. The experiments also revealed that the choice of the p-value in the algebra of elliptic quaternions directly affects the performance of the solution of the problem under consideration. Selecting an optimal p-value for problem-solving, combined with the elliptic characteristics exhibited by many physical systems, renders this number system advantageous in image processing and other applied fields. Therefore, integrating the elliptic quaternions system into the image processing process can effectively address various challenges related to computational time, memory usage, and overall performance in fields such as machine learning, convolutional neural networks, etc.
On the other hand, the optimal p-values for the problems considered were selected via a brute-force approach by searching in a specific range with a certain step size. It was observed that, in certain cases, the optimal p-values clustered at specific points. Investigating the underlying reasons for this clustering, elucidating the relationship between the optimal p-values and the problems discussed, and developing analytical methods for determining the optimal p-values are proposed as subjects for future research in this article.
Author Contributions
Conceptualization, H.H.K.; Formal analysis, E.K. and M.A.; H.H.K., E.K., and B.Ç. wrote the main manuscript text. All authors reviewed the manuscript. All authors have read and agreed to the published version of the manuscript.
Funding
This paper was supported by the Scientific and Technological Research Institution of Türkiye (TUBITAK-1002-a-121F289).
Data Availability Statement
The original data presented in the study are openly available at https://github.com/hidayethuda/elliptic_quaternions_and_elliptic_numbers_toolbox, accessed on 22 August 2024.
Acknowledgments
This paper was supported by the Scientific and Technological Research Institution of Türkiye. We thank TÜBİTAK for their support. In addition, the authors would like to thank the anonymous referees for their helpful suggestions and comments, which significantly improved the presentation of the paper.
Conflicts of Interest
The authors declare no competing interests.
References
- Hamilton, W.R. On a new species of imaginary quantities, connected with the theory of quaternions. Proc. R. Ir. Acad. 1840, 2, 424–434. [Google Scholar]
- Adler, S. Quaternionic Quantum Mechanics and Quantum Fields; Oxford University Press: New York, NY, USA, 1995. [Google Scholar]
- Mukundan, R. Quaternions. Advanced Methods in Computer Graphics: With Examples in OpenGL; Springer-Verlag London Limited: London, UK, 2012. [Google Scholar]
- Ell, T.A.; Bihan, N.L.; Sangwine, S.J. Quaternion Fourier Transforms for Signal and Image Processing; Wiley: Hoboken, NJ, USA, 2014. [Google Scholar]
- Parcollet, T.; Morchid, M.; Linares, G. A survey of quaternion neural networks. Artif. Intell. Rev. 2020, 53, 2957–2982. [Google Scholar] [CrossRef]
- Sangwine, S.J.; Bihan, N.L. Quaternion Toolbox for Matlab. Available online: http://qtfm.sourceforge.net/ (accessed on 22 August 2024).
- Pei, S.C.; Chang, J.H.; Ding, J.J. Commutative Reduced Biquaternions and Their Fourier Transform for Signal and Image Processing Applications. IEEE Trans. Signal Process 2004, 52, 2012–2031. [Google Scholar] [CrossRef]
- Navarro-Moreno, J.; Fernández-Alcalá, R.M.; Ruiz-Molina, J.C. Proper ARMA Modeling and Forecasting in the Generalized Segre’s Quaternions Domain. Mathematics 2022, 10, 1083. [Google Scholar] [CrossRef]
- Catoni, F.; Cannata, R.; Zampetti, P. An introduction to commutative quaternions. Adv. Appl. Clifford Algebr. 2006, 16, 1–28. [Google Scholar] [CrossRef]
- Catoni, F.; Boccaletti, D.; Cannata, R.; Catoni, V.; Nichelatti, E.; Zampetti, P. The Mathematics of Minkowski Space–Time: With an Introduction to Commutative Hypercomplex Numbers; Birkhäuser: Basel, Switzerland, 2008. [Google Scholar]
- Yaglom, I.M. A Simple Non-Euclidean Geometry and Its Physical Basis; Springer: New York, NY, USA, 1979. [Google Scholar]
- Condurache, D.; Burlacu, A. Dual tensors based solutions for rigid body motion parameterization. Mech. Mach. Theory 2014, 74, 390–412. [Google Scholar] [CrossRef]
- Catoni, F.; Cannata, R.; Zampetti, P. An introduction to constant curvature spaces in the commutative (Segre) quaternion geometry. Adv. Appl. Clifford Algebr. 2006, 16, 85–101. [Google Scholar] [CrossRef]
- Gai, S. Theory of reduced biquaternion sparse representation and its applications. Expert Syst. Appl. 2023, 213, 119245. [Google Scholar] [CrossRef]
- Kosal, H.H.; Kisi, E.; Akyigit, M.; Celik, B. Elliptic Quaternion Matrices: Theory and Algorithms. Axioms 2024, 13, 656. [Google Scholar] [CrossRef]
- Gai, S.; Huang, X. Reduced biquaternion convolutional neural network for color image processing. IEEE Trans. Circuits Syst. Video Technol. 2022, 32, 1061–1075. [Google Scholar] [CrossRef]
- Kobayashi, M. Twin-multistate commutative quaternion Hopfield neural networks. Neurocomputing 2018, 320, 150–156. [Google Scholar] [CrossRef]
- Atali, G.; Kosal, H.H.; Pekyaman, M. A new image restoration model associated with special elliptic quaternionic least-squares solutions based on LabVIEW. J. Comput. Appl. Math. 2023, 425, 115071. [Google Scholar] [CrossRef]
- Harkin, A.A.; Harkin, J.B. Geometry of generalized complex numbers. Math. Mag. 2004, 77, 118–129. [Google Scholar] [CrossRef]
- Tosun, M.; Kösal, H.H. An Algorithm for Solving the Sylvester s-Conjugate Elliptic Quaternion Matrix Equations. In Algorithms as a Basis of Modern Applied Mathematics. Studies in Fuzziness and Soft Computing; Hošková-Mayerová, Š., Flaut, C., Maturo, F., Eds.; Springer: Cham, Switzerland, 2021; Volume 404. [Google Scholar]
- Chang, J.H.; Ding, J.J. Quaternion matrix singular value decomposition and its applications for color image processing. In Proceedings of the 2003 International Conference on Image Processing (Cat. No. 03CH37429), Barcelona, Spain, 14–17 September 2003; Volume 1, p. I-805. [Google Scholar]
- Pei, S.C.; Chang, J.H.; Ding, J.J.; Chen, M.Y. Eigenvalues and singular value decompositions of reduced biquaternion matrices. IEEE Trans. Circuits Syst. I Regul. Pap. 2008, 55, 2673–2685. [Google Scholar]
- Gunturk, B.K. Fundamental of image restoration. In Image Restoration Fundamentals and Advances; Gunturk, B.K., Li, X., Eds.; CRC Press: New York, NY, USA, 2013; pp. 25–61. [Google Scholar]
- Abd El-Samie, F.E. An efficient singular value decomposition algorithm for digital audio watermarking. Int. J. Speech Technol. 2009, 12, 27–45. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).