
Analytical and Numerical Approaches via Quadratic Integral Equations



Abstract
1. Introduction
2. Auxiliary Results and Notation
- (1*)
- The family ker is nonempty and ker ;
- (2*)
- ;
- (3*)
- Conv ;
- (4*)
- for ;
- (5*)
- If is a sequence of closed sets from such that for and if , then the set is nonempty.
3. Existence of the Solution
- (a)
- is continuous on the set .
- (b)
- The function is nondecreasing on for any fixed .
- (c)
- For any fixed the function is nondecreasing on R.
- (d)
- With a constant , the function satisfies the Lipschitz condition.
- (i)
- are continuous, nondecreasing functions on the set and there exist constant , such that .
- (ii)
- The functions satisfies the following conditions:where for all and .
- (iii)
- The kernels belong to the class and satisfy the conditions: where and are two constants.
- (iv)
- for
4. Hermite-and-Laguerre-Polynomial-Based Collocation Technique
5. Convergence of a Solution to the System of Quadratic Integral Equation (12)
5.1. Hermite-Polynomial-Based Collocation Technique
5.2. Laguerre-Polynomial-Based Collocation Technique
6. Numerical Illustrations
7. Final Remarks
7.1. Discussions and Conclusions on Numerical Solutions
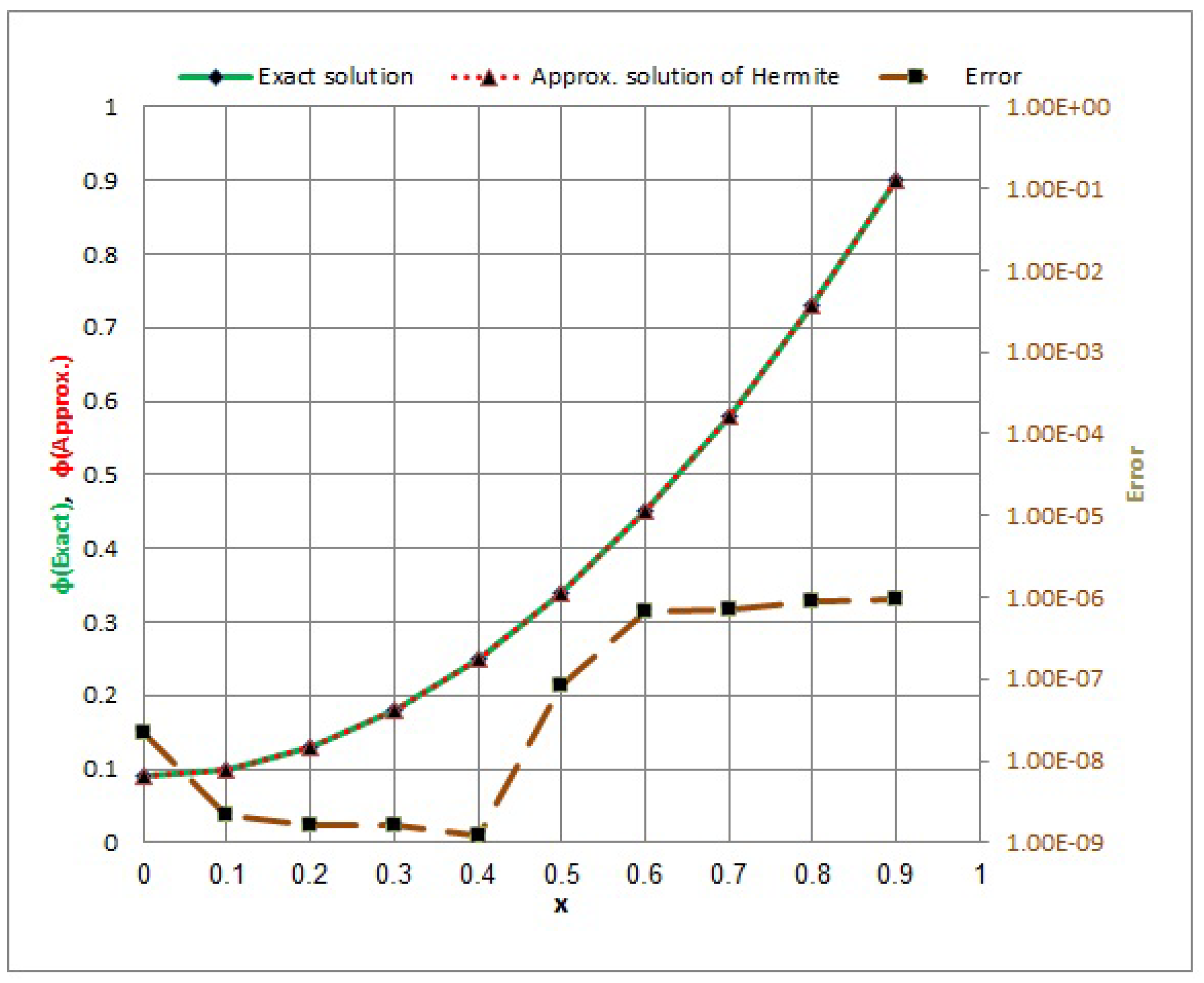
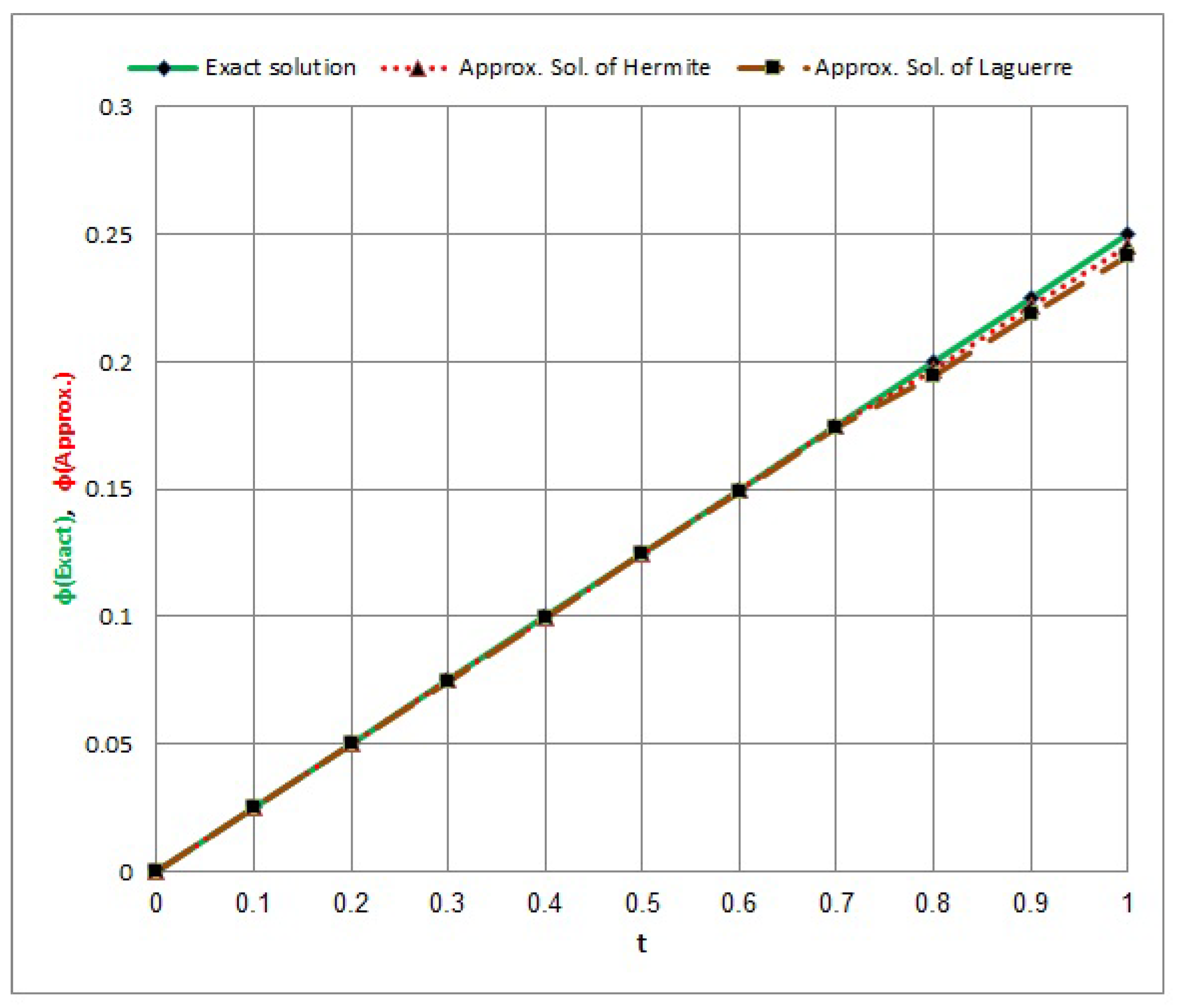
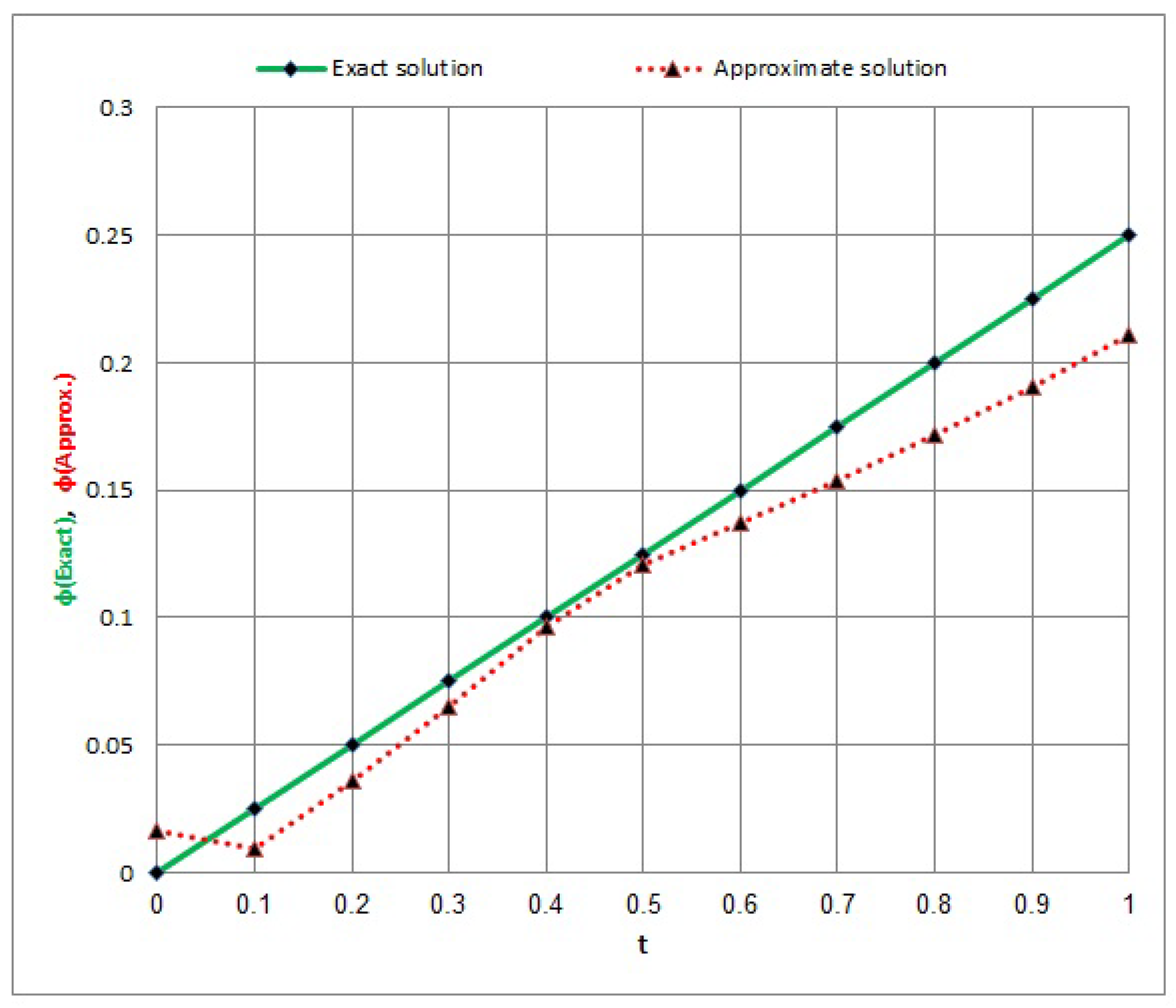
- From Example 1, for the quadratic integral equation Equation (27) in Table 1 and Figure 1 and Figure 2, the max. value error of the collocation method via Hermite polynomials is at , while the max. value error of the collocation method via Laguerre polynomials is at . In addition, the error of the collocation method via Laguerre and Hermite polynomials is decreasing at and increasing at .
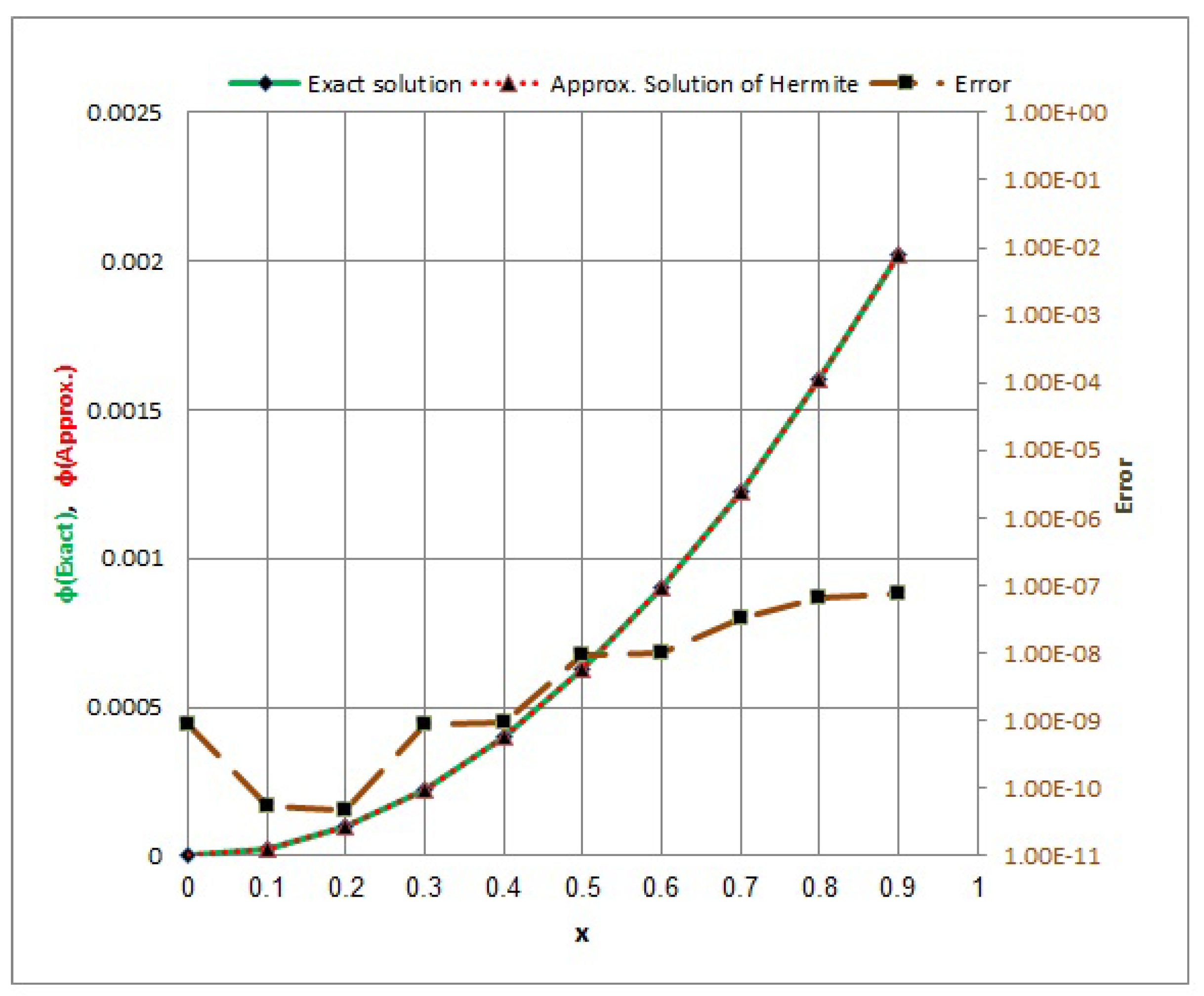
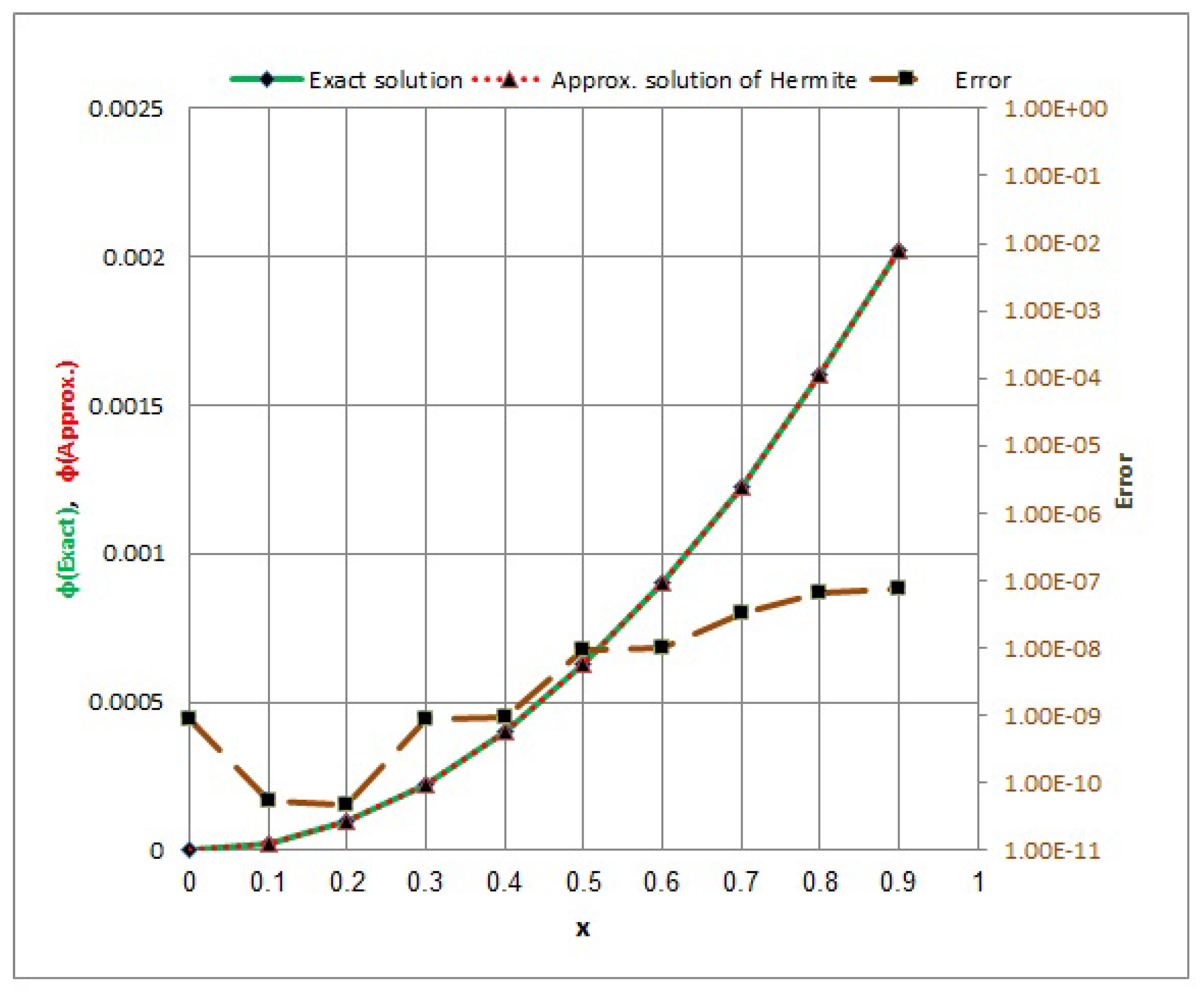
- In Example 2, for Equation (28) in Table 2 and Figure 3 and Figure 4, the max. value error of the collocation method via Hermite polynomials is at , while the max. value error of the collocation method via Laguerre polynomials is . In addition, the error of the collocation method via Hermite polynomials is decreasing at and increasing at , while the error of the collocation method via Laguerre polynomials is decreasing at and increasing at .
- In Example 3, for Equation (29) of the second kind at in Table 3 and Figure 5 and Figure 6, the max. value error of collocation method via Hermite polynomials is , while the max. value error of the collocation method via Laguerre polynomials is . The errors of the collocation methods via Laguerre and Hermite polynomials increase if the position x increases, and vice versa.
- From Examples 1–3, we notice that the numerical solution quickly converges to the exact solution when the variable t converges to 0. When the variable x takes the value , we obtain a maximum value of the error; conversely, we find a minimum value of the error at .
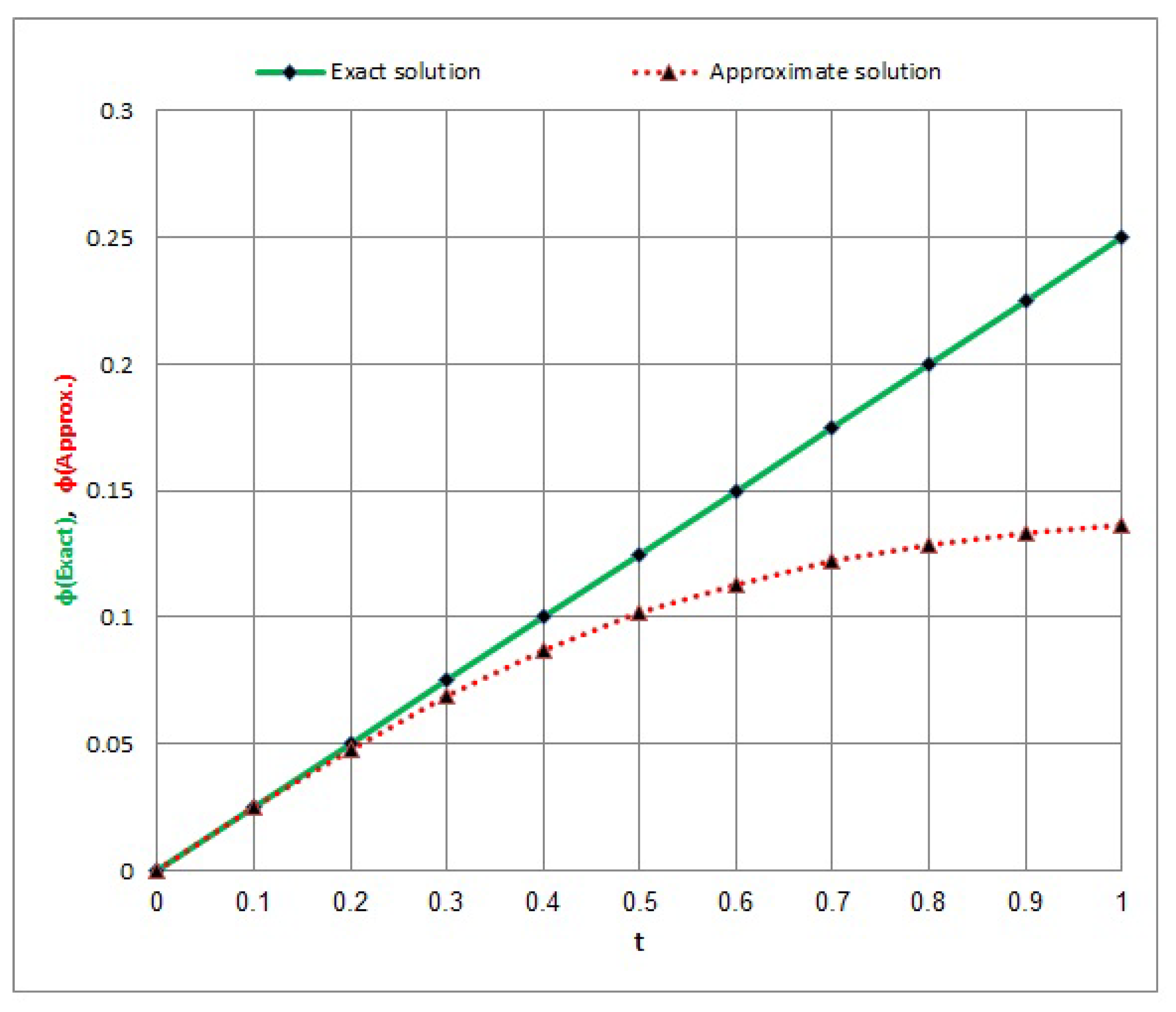
- In Example 4, we discussed Equation (30), which was discussed previously in [36]. We can see from Table 4 and Table 5, and Figure 7, Figure 8, Figure 9 and Figure 10 that the method studied in this article is more accurate in terms of results and better in providing a numerical solution closer to the exact solution.
7.2. Conclusions
- In this research, a quadratic integral equation is discussed in a general form, in the space , from which many special cases can be derived. These special cases are considered important in application in many different fields.
- If in Equation (1), we let , we have a nonlinear integral equationThe above equation also has many applications in different fields.
- It is noted that the squaring method, which depends on dividing one of the variables into distances that may be equal or unequal, directly helps transform the quadratic integral equation in two variables into an algebraic system of quadratic integral equations in one variable.
- Combining the collocation method and orthogonal polynomials enables researchers to obtain more accurate and less error-prone solutions compared to other methods.
8. Future Work
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Alhazmi, S.E.A. New Model for Solving Mixed Integral Equation of the First Kind with Generalized Potential Kernel. J. Math. Res. 2017, 9, 18–29. [Google Scholar] [CrossRef]
- Ghiat, M.; Tair, B.; Ghuebbai, H.; Kamouche, S. Block-by-block method for solving non-linear Volterra integral equation of the first kind. Comp. Appl. Math. 2023, 42, 42–67. [Google Scholar] [CrossRef]
- Gong, W.; Li, B.; Yang, H. Optimal Control in a Bounded Domain for Wave Propagating in the Whole Space: Coupling Through Boundary Integral Equations. J. Sci. Comput. 2022, 92, 91. [Google Scholar] [CrossRef]
- Jaabar, S.H.; Hussain, A.H. Solving Volterra integral equation by using a new transformation. J. Interdiscip. Math. 2021, 24, 735–741. [Google Scholar] [CrossRef]
- Matoog, R.T.; Abdou, M.A.; Abdel-Aty, M.A. New algorithms for solving nonlinear mixed integral equations. AIMS Math. 2023, 8, 27488–27512. [Google Scholar] [CrossRef]
- Ma, Z.; Huang, C. Fractional Collocation Method for Third-Kind Volterra Integral Equations with Nonsmooth Solutions. J. Sci. Comput. 2023, 95, 26. [Google Scholar] [CrossRef]
- Micula, S. On some iterative numerical methods for a Volterra functional integral equation of the second kind. J. Fixed Point Theory Appl. 2017, 19, 1815–1824. [Google Scholar] [CrossRef]
- Micula, S. An iterative numerical method for Fredholm–Volterra integral equations of the second kind. Appl. Math. Comput. 2015, 270, 935–942. [Google Scholar] [CrossRef]
- Sarkar, N.; Sen, M.; Saha, D. Solution of non linear Fredholm integral equation involving constant delay by BEM with piecewise linear approximation. J. Interdiscip. Math. 2020, 23, 537–544. [Google Scholar] [CrossRef]
- Fatahi, H.; Saberi–Nadjafi, J.; Shivanian, E. A new spectral meshless radial point interpolation(SMRPI) method for the two–dimensional Fredholm integral equations on general domains with error analysis. J. Comput. Appl. Math. 2016, 294, 196–209. [Google Scholar] [CrossRef]
- Noeiaghdam, S.; Dreglea, A.; He, J.; Avazzadeh, Z.; Suleman, M.; Fariborzi Araghi, M.A.; Sidorov, D.N.; Sidorov, N. Error estimation of the homotopy perturbation method to solve second kind Volterra integral equations with piecewise smooth kernels. Application of the CADNA library. Symmetry 2020, 12, 1730. [Google Scholar] [CrossRef]
- Jaan, A.R. Solution of nonlinear mixed integral equation via collocation method basing on orthogonal polynomials. Heliyon 2022, 8, e11827. [Google Scholar] [CrossRef]
- Abusalim, S.A.; Abdou, M.A.; Nasr, M.E.; Abdel–Aty, M.A. An Algorithm for the Solution of Nonlinear Volterra–Fredholm Integral Equations with a Singular Kernel. Fractal Fract 2023, 7, 730. [Google Scholar] [CrossRef]
- Abdel–Aty, M.A.; Abdou, M.A. Analytical and Numerical Discussion for the Phase-Lag Volterra-Fredholm Integral Equation with Singular Kernel. J. Appl. Anal. Comput. 2023, 13, 3203–3220. [Google Scholar] [CrossRef] [PubMed]
- Abusalim, S.A.; Abdou, M.A.; Abdel–Aty, M.A.; Nasr, M.E. Hybrid Functions Approach via Nonlinear Integral Equations with Symmetric and Nonsymmetrical Kernel in Two Dimensions. Symmetry 2023, 15, 1408. [Google Scholar] [CrossRef]
- Adibi, H.; Shamooshaky, M.; Assar, P. CAS wavelet method for the numerical solution of boundary integral equations with logarithmic singular kernels. Int. J. Math. Model. Comput. 2014, 4, 377–387. [Google Scholar]
- Abdel–Aty, M.A.; Abdou, M.A.; Soliman, A.A. Solvability of quadratic integral equations with singular kernel. J. Contemp. Math. Anal. 2022, 57, 12–25. [Google Scholar] [CrossRef]
- Mirzaee, F.; Hoseini, S.F. Application of Fibonacci collocation method for solving Volterra–Fredholm integral equations. Appl. Math. Comput. 2016, 273, 637–644. [Google Scholar] [CrossRef]
- Hesameddini, E.; Shahbazi, M. Solving system of Volterra–Fredholm integral equations with Bernstein polynomials and hybrid Bernstein Block-Pulse functions. J. Comput. Appl. Math. 2017, 315, 182–194. [Google Scholar] [CrossRef]
- Alhazmi, S.E.A. Certain results associated with mixed integral equations and their comparison via numerical methods. J. Umm Al-Qura Univ. Appl. Sci. 2023, 9, 57–66. [Google Scholar] [CrossRef]
- Mirzaee, F.; Hadadiyan, E. Numerical solution of linear Fredholm integral equations via two–dimensional modification of hat functions. Appl. Math. Comput. 2015, 250, 805–816. [Google Scholar] [CrossRef]
- Bazm, S. Bernoulli polynomials for the numerical solution of some classes of linear and nonlinear integral equations. J. Comput. Appl. Math. 2015, 275, 44–60. [Google Scholar] [CrossRef]
- Mirzaee, F.; Samadyar, N. On the numerical solution of stochastic quadratic integral equations via operational matrix method. Math. Methods Appl. Sci. 2018, 41, 4465–4479. [Google Scholar] [CrossRef]
- Benkerrouche, A.; Souid, M.S.; Stamov, G.; Stamova, I. On the solutions of a quadratic integral equation of the Urysohn type of fractional variable order. Entropy 2022, 24, 886. [Google Scholar] [CrossRef]
- Heydari, M.H. A computational method for a class of systems of nonlinear variable-order fractional quadratic integral equations. Appl. Numer. Math. 2020, 153, 164–178. [Google Scholar] [CrossRef]
- Metwali, M. On some properties of Riemann–Liouville fractional operator in Orlicz spaces and applications to quadratic integral equations. Filomat 2022, 36, 6009–6020. [Google Scholar] [CrossRef]
- Abdou, M.A.; Soliman, A.A.; Abdel-Aty, M.A. Analytical results for quadratic integral equations with phase-lag term. J. Appl. Anal. Comput. 2020, 10, 1588–1598. [Google Scholar] [CrossRef]
- El–Sayed, A.M.A.; Hashem, H.H.G.; Omar, Y.M.Y. Positive continuous solution of a quadratic integral equation of fractional orders. Math. Sci. Lett. 2013, 2, 19–27. [Google Scholar] [CrossRef]
- Abdel–Aty, M.A.; Abdou, M.A. Analytical and numerical discussion for the quadratic integral equations. Filomat 2023, 37, 8095–8111. [Google Scholar] [CrossRef]
- Mirzaee, F.; Hadadiyan, E. Application of modified hat functions for solving nonlinear quadratic integral equations. Iran J. Numer. Anal. Opt. 2016, 6, 65–84. [Google Scholar] [CrossRef]
- Arab, R.; Allahyari, R. Shole Haghighi, A. Existence of solutions of infinite systems of integral equations in two variables via measure of noncompactness. Appl. Math. Comput. 2014, 246, 283–291. [Google Scholar] [CrossRef]
- Basseem, M.; Alalyani, A. On the solution of quadratic nonlinear integral Equation with different singular kernels. Math. Probl. Eng. 2020, 2020, 7856207. [Google Scholar] [CrossRef]
- Banaś, J.; Jleli, M.; Mursaleen, M.; Samet, B.; Vetro, C. (Eds.) Advances in Nonlinear Analysis via the Concept of Measure of Noncompactness; Springer Nature: Singapore, 2017. [Google Scholar] [CrossRef]
- Pourhadi, E.; Saadati, R.; Nieto, J.J. On the attractivity of the solutions of a problem involving Hilfer fractional derivative via the measure of noncompactness. Fixed Point Theory 2023, 24, 343–366. [Google Scholar] [CrossRef]
- Delves, L.M.; Mohamed, J.L. Computational Methods for Integral Equations; Cambridge University Press: New York, NY, USA, 1988. [Google Scholar]
- Mishra, L.N.; Pathak, V.K.; Baleanu, D. Approximation of solutions for nonlinear functional integral equations. AIMS Math. 2022, 7, 17486–17506. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Exact Sol. | Hermite Polys. | Error of Hermite | Laguerre Polys. | Error of Laguerre | |
|---|---|---|---|---|---|
| 0 | 0.09 | 0.089999978 | 2.236 | 0.089999597 | 4.034 |
| 0.1 | 0.1 | 0.099999998 | 2.122 | 0.09999997 | 3.025 |
| 0.2 | 0.13 | 0.129999998 | 1.634 | 0.129999976 | 2.369 |
| 0.3 | 0.18 | 0.179999998 | 1.585 | 0.179999978 | 2.164 |
| 0.4 | 0.25 | 0.249999999 | 1.208 | 0.249999979 | 2.112 |
| 0.5 | 0.34 | 0.339999917 | 8.266 | 0.339999038 | 9.624 |
| 0.6 | 0.45 | 0.449999348 | 6.524 | 0.44999718 | 2.821 |
| 0.7 | 0.58 | 0.579999307 | 6.932 | 0.579996631 | 0.000003369 |
| 0.8 | 0.73 | 0.729999126 | 8.741 | 0.729994998 | 0.000005002 |
| 0.9 | 0.9 | 0.899999076 | 9.236 | 0.899993886 | 0.000006114 |
| Exact Sol. | Hermite Polys. | Error of Hermite | Laguerre Polys. | Error of Laguerre | |
|---|---|---|---|---|---|
| 0.0 | 0 | 8.652 | 8.652 | 2.587 | 2.587 |
| 0.1 | 0.000025 | 2.499 | 5.411 | 2.499 | 2.631 |
| 0.2 | 0.0001 | 1.000 | 4.754 | 9.999 | 5.231 |
| 0.3 | 0.000225 | 0.000224999 | 8.758 | 0.000224993 | 7.418 |
| 0.4 | 0.0004 | 0.000399999 | 9.587 | 0.000399991 | 8.648 |
| 0.5 | 0.000625 | 0.00062499 | 9.632 | 0.000624938 | 6.235 |
| 0.6 | 0.0009 | 0.00089999 | 9.961 | 0.000899928 | 7.231 |
| 0.7 | 0.001225 | 0.001224967 | 3.254 | 0.001224904 | 9.624 |
| 0.8 | 0.0016 | 0.001599935 | 6.523 | 0.001599136 | 8.645 |
| 0.9 | 0.002025 | 0.002024926 | 7.412 | 0.002024094 | 9.058 |
| Exact Sol. | Hermite Polys. | Error of Hermite | Laguerre Polys. | Error of Laguerre | |
|---|---|---|---|---|---|
| 0 | 0.000025 | 0.000025 | 3.22 | 0.000025 | 5.25 |
| 0.1 | 2.763 | 2.763 | 7.13 | 2.763 | 5.99 |
| 0.2 | 3.053 | 3.053 | 5.68 | 3.053 | 2.37 |
| 0.3 | 3.375 | 3.375 | 6.03 | 3.375 | 1.03 |
| 0.4 | 3.730 | 3.730 | 6.90 | 3.730 | 5.21 |
| 0.5 | 4.122 | 4.122 | 6.07 | 4.122 | 7.26 |
| 0.6 | 4.555 | 4.555 | 7.11 | 4.555 | 9.37 |
| 0.7 | 5.034 | 5.034 | 7.57 | 5.034 | 3.37 |
| 0.8 | 5.564 | 5.564 | 8.26 | 5.564 | 6.32 |
| 0.9 | 6.149 | 6.149 | 8.21 | 6.149 | 8.99 |
| Error of | Error of | |||||
|---|---|---|---|---|---|---|
| of Hermite | of Laguerre | Method of [36] | of Hermite | of Laguerre | Method of [36] | |
| 0 | 0 | 5.931 | 0 | 3.147 | 4.587 | 1.61 |
| 0.1 | 5.741 | 4.635 | 3 | 4.563 | 5.965 | 1.59 |
| 0.2 | 7.411 | 5.963 | 1.9 | 4.654 | 6.456 | 1.42 |
| 0.3 | 7.952 | 6.524 | 5.9 | 5.952 | 2.457 | 1.01 |
| 0.4 | 8.853 | 6.852 | 1.3 | 6.258 | 4.213 | 3.8 |
| 0.5 | 3.531 | 7.528 | 2.34 | 7.856 | 6.547 | 4.2 |
| 0.6 | 4.204 | 7.968 | 3.68 | 2.047 | 7.698 | 1.29 |
| 0.7 | 6.824 | 8.521 | 5.3 | 3.965 | 8.472 | 2.12 |
| 0.8 | 5.632 | 9.124 | 7.15 | 2.854 | 5.368 | 2.82 |
| 0.9 | 3.541 | 5.232 | 9.18 | 3.147 | 6.147 | 3.42 |
| 1.0 | 5.223 | 7.852 | 1.135 | 4.567 | 8.210 | 3.91 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alahmadi, J.; Abdou, M.A.; Abdel-Aty, M.A. Analytical and Numerical Approaches via Quadratic Integral Equations. Axioms 2024, 13, 621. https://doi.org/10.3390/axioms13090621
Alahmadi J, Abdou MA, Abdel-Aty MA. Analytical and Numerical Approaches via Quadratic Integral Equations. Axioms. 2024; 13(9):621. https://doi.org/10.3390/axioms13090621
Chicago/Turabian StyleAlahmadi, Jihan, Mohamed A. Abdou, and Mohamed A. Abdel-Aty. 2024. "Analytical and Numerical Approaches via Quadratic Integral Equations" Axioms 13, no. 9: 621. https://doi.org/10.3390/axioms13090621
APA StyleAlahmadi, J., Abdou, M. A., & Abdel-Aty, M. A. (2024). Analytical and Numerical Approaches via Quadratic Integral Equations. Axioms, 13(9), 621. https://doi.org/10.3390/axioms13090621