
Bifurcation and Dynamics Analysis of a Piecewise-Linear van der Pol Equation

Abstract
1. Introduction
2. Preliminaries
- includes all points in for which is less than zero;
- includes all points in for which is greater than zero.
- 1.
- and is less than zero;
- 2.
- and is greater than zero.
- 1.
- while is greater than zero;
- 2.
- while is less than zero.
- 1.
- , indicating that both functions and equal zero at this point;
- 2.
- , meaning that the point lies on the discontinuity boundary.
- 1.
- If the product of the trace of and the trace of is positive, then no limit cycle arises in the bifurcation due to an area restriction.
- 2.
- If the product of the traces is negative, and is positive (indicating a persistence bifurcation), then the existence of a limit cycle depends on the transition observed.
- (a)
- If a transition from a focus to a node is observed, the cycle exists. The stability of this cycle depends on the trace of the Jacobian matrix obtained by linearizing the system around a node. It is stable if the trace of the matrix is negative (indicating a stable node) and unstable if the trace of the matrix is positive.
- (b)
- If a transition between nodes or between saddles is observed, no limit cycle exists in the system.
3. The Piecewise Linear VDP Equation
3.1. The PWL VDP Equation
3.2. The Behavior of the Linear Elements
3.3. Bifurcations and Dynamics
- Case . In this scenario, the unique equilibrium resides on and is characterized by global asymptotic stability. Consequently, it serves as the global attractor for system (7), meaning that all of the trajectories of the system will ultimately converge to this equilibrium point, regardless of their initial positions.
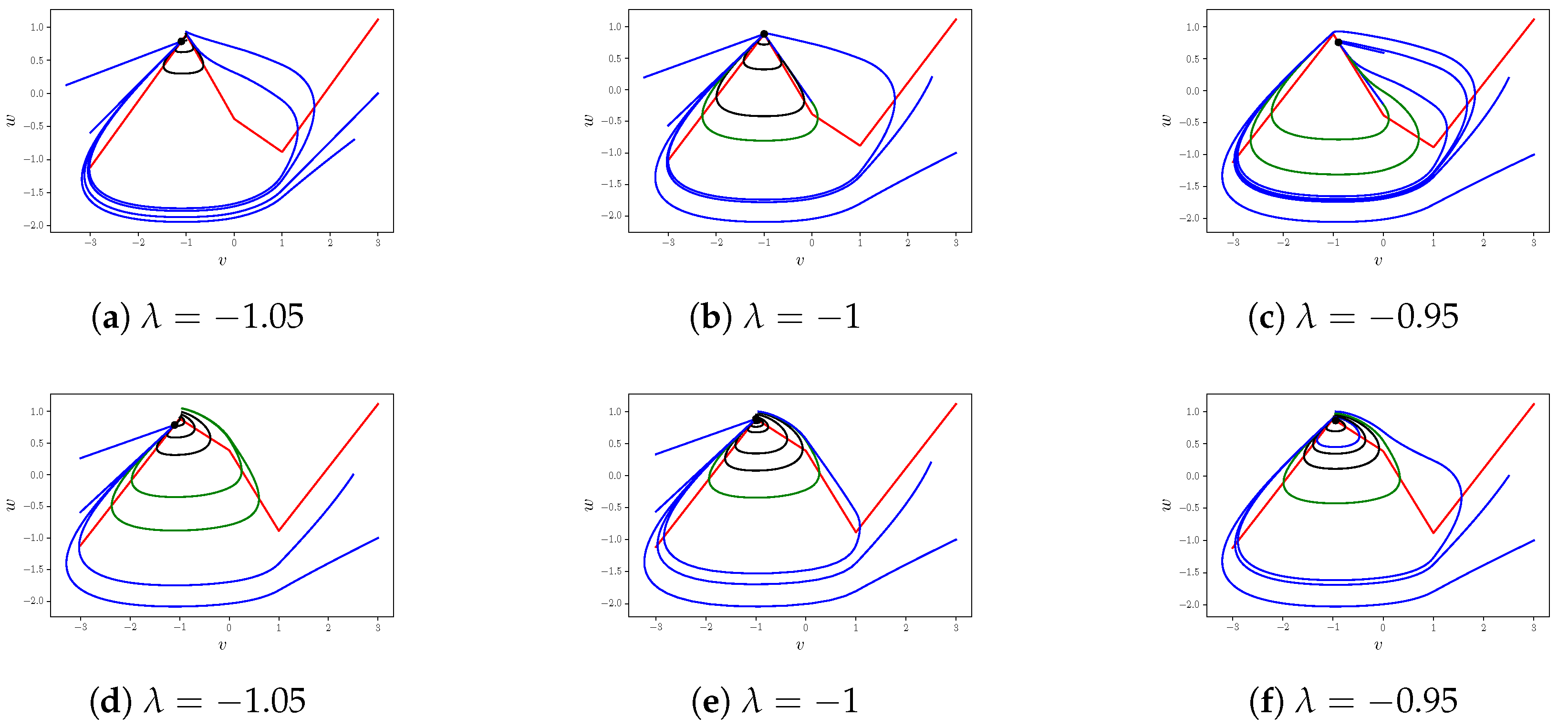
- Case . The equilibrium perpetually serves as the universal attractor for system (7), i.e., all trajectories tend towards the equilibrium as . Although this equilibrium point is unstable, being either a node or a focus, when viewed from zone , orbits that start with can diverge significantly from this equilibrium point, potentially traversing zones , , and even . Regardless of this, because the orbits are ultimately bounded (as system (7) is dissipative) and no other equilibria exist, they will ultimately reach at a point , where . At this point, the stable node assumes dominance.In particular, for the node case, when , two linear invariant manifolds, which are unstable, extend from this equilibrium towards the right. The higher of these two invariant manifolds, which coincides for with the equation , evolves into a maximal homoclinic orbit. However, in the focus case, when , the system features a continuum of homoclinic orbits but lacks the maximal homoclinic orbit.
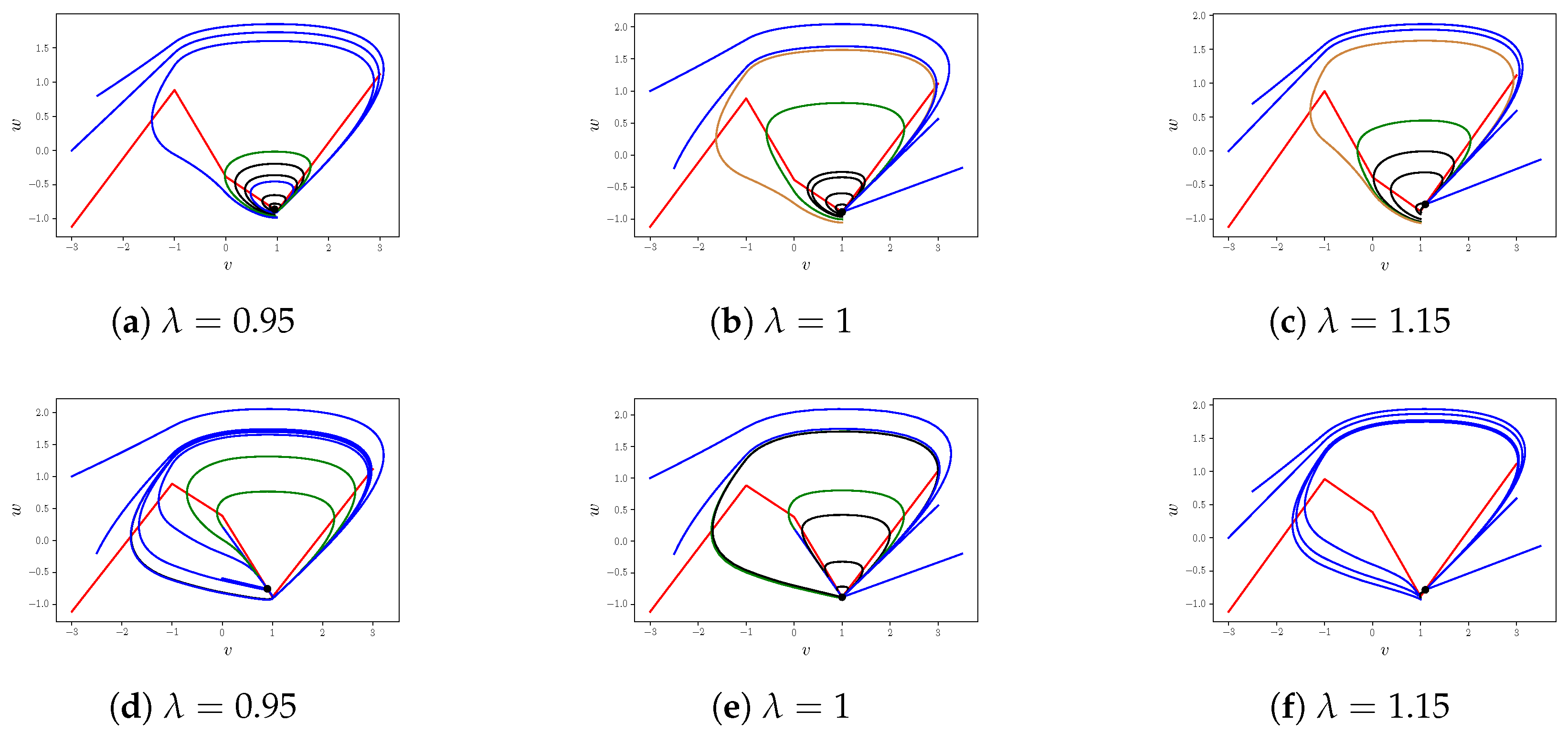
- Case . The equilibrium is situated on either or and is characterized as either an unstable node or an unstable focus. In both cases, it is encircled by a unique stable limit cycle. In the focus scenario, the existence and uniqueness of this limit cycle are guaranteed by Theorem 1. Given that the system transitions from a focus to a node, the presence of a limit cycle is inevitable. Furthermore, since the node is stable, it follows that the associated limit cycle encircling an unstable focus must also be stable. Therefore, a supercritical Hopf bifurcation occurs as the parameter crosses the value of .However, Theorem 1 does not apply to the node case. The existence and uniqueness of the limit cycle for the node case can be established through Theorem 1 from [31].It is important to recognize that the size of the limit cycle can change based on the nature of the equilibrium points within the system.
- 1.
- Node case. In scenarios where the equilibrium is a node, there are two invariant manifolds present. The limit cycle lies outside these manifolds and cannot intersect with them. Since both linear segments, and , act as repellers, the limit cycle must traverse through all four distinct regions of the phase space.
- 2.
- Focus case. According to Theorem 1, when , a limit cycle is present in regions and . Conversely, when , a limit cycle is found in regions and .
The magnitude of the limit cycle can be summarized as follows.- 1.
- When , the limit cycle traverses across four distinct regions;
- 2.
- When , the limit cycle is confined to regions and as the parameter is close to ;
- 3.
- When , the limit cycle passes through four distinct regions;
- 4.
- When , the limit cycle is restricted to regions and as approaches 1.
- Case . The equilibrium is globally attractive. Although this equilibrium point is unstable, being either a node or a focus, when viewed from zone , orbits that start with can diverge significantly from this equilibrium point, utilizing zones , , and even . Regardless of this, they will inevitably reach at , where . At this point, the stable node takes over.Similarly to the case of , for the node situation, the lower of two unstable invariant manifolds, which coincides for with the equation , evolves into a maximal homoclinic orbit. However, in the focus case, when , the system possesses a continuum of homoclinic orbits but lacks the maximal homoclinic orbit.According to Theorem 1, we have
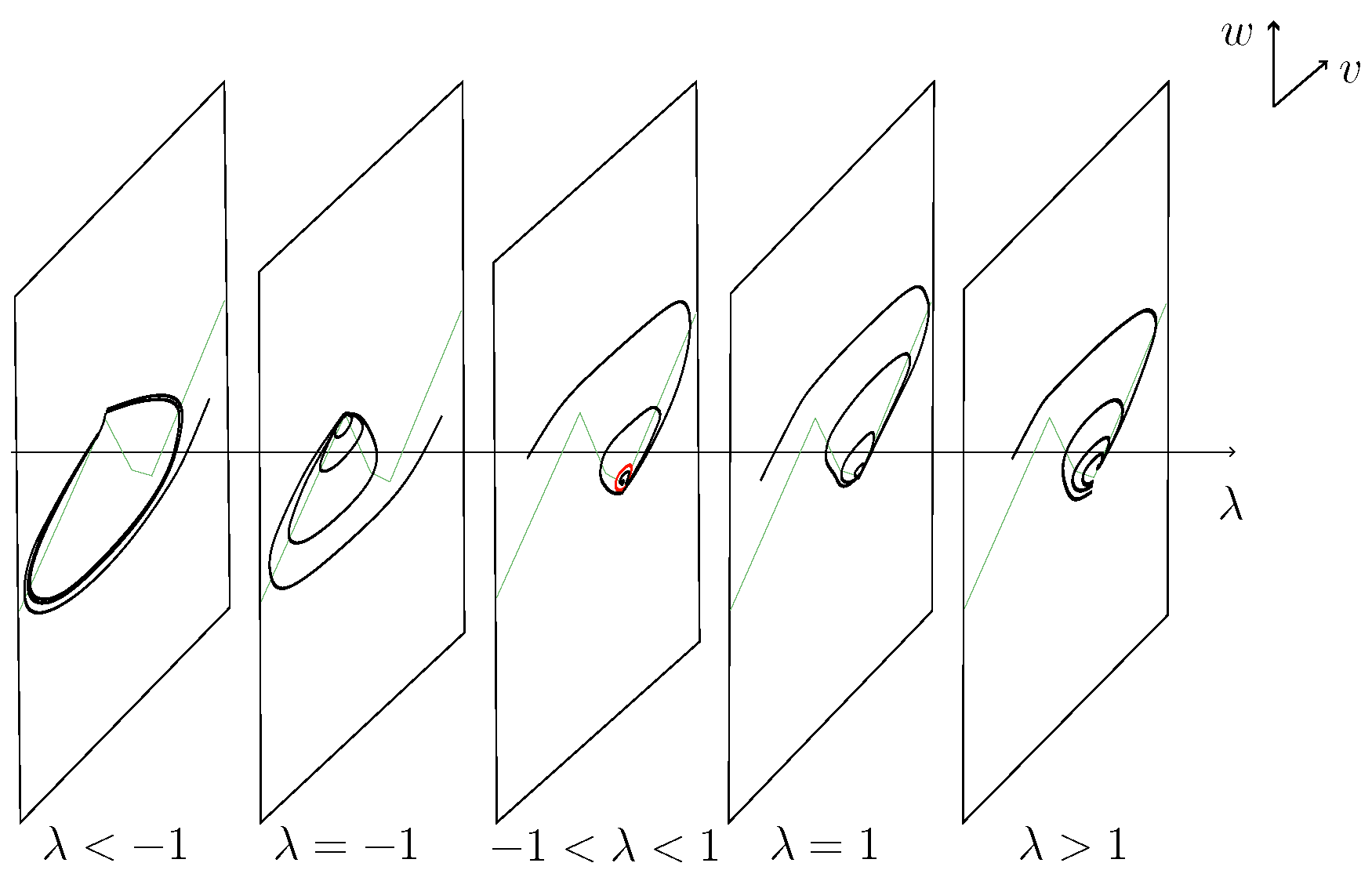
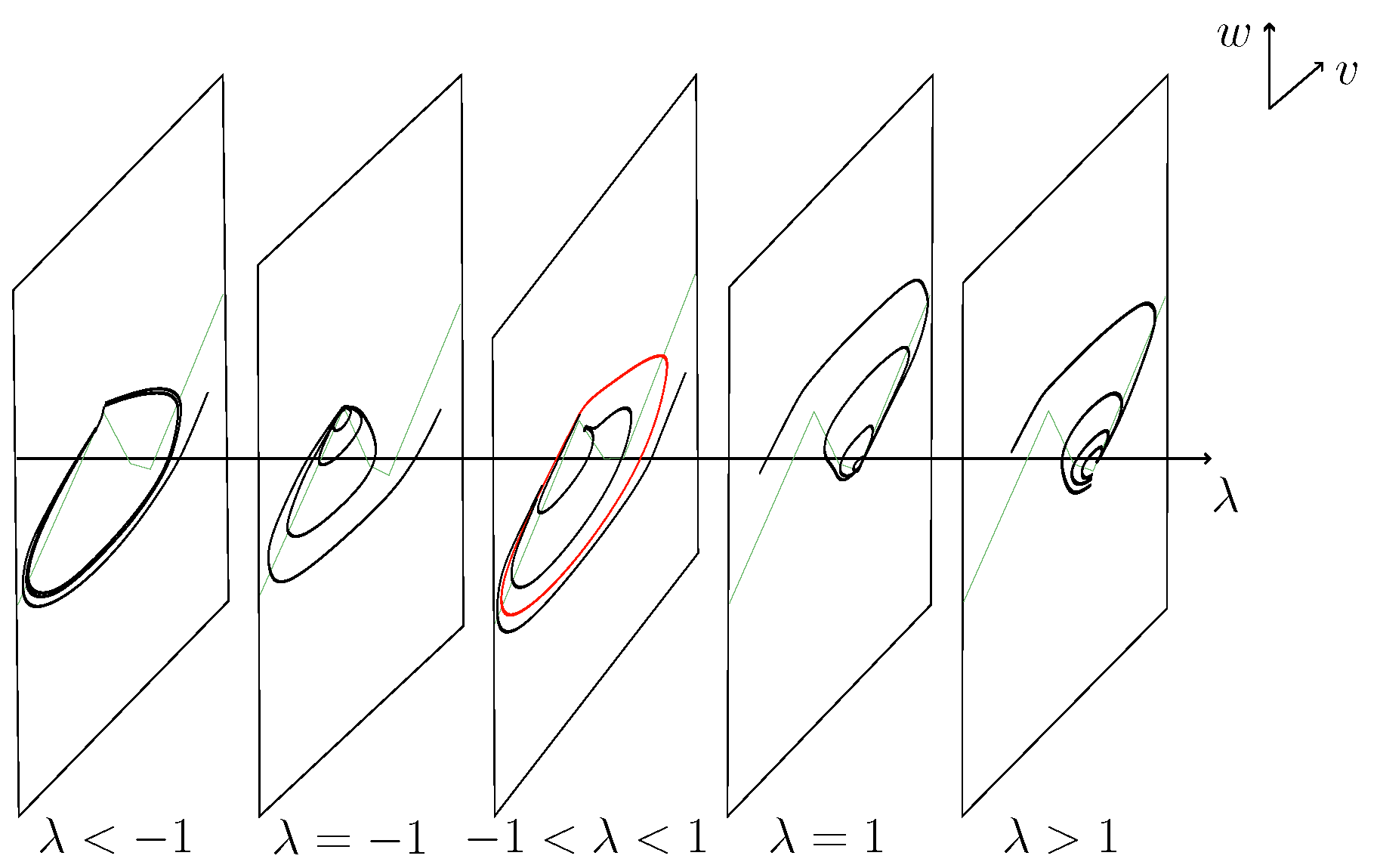
- Case . In this case, the unique equilibrium is located on and serves as the global attractor for system (7). A supercritical Hopf bifurcation takes place as passes through the value of 1. Figure 4 and Figure 5 display schematic representations of the phase portraits that correspond to the full range of the parameter . These figures were created using Inkscape.
4. Comparison Between Models with Varying Quantities of Linear Segments
- 1.
- 2.
- Dynamical behavior: Both models undergo a supercritical Hopf bifurcation and exhibit a continuum of homoclinic orbits at . In both systems, the presence of limit cycles is observed. This indicates that increasing the number of linear segments from three to four does not fundamentally alter the bifurcation structure of the system.However, our system (7) allows for a more detailed analysis of the dynamics near , revealing behavior analogous to that observed at . Moreover, from the perspective of a boundary equilibrium analysis, the persistence bifurcation at has been investigated, which is not explicitly discussed in system (24). This provides additional insights into the system’s dynamics.
- 3.
- Numerical simulations: Our numerical simulations (Figure 6) illustrate the phase portraits for both the three-zone and four-zone models. The simulations show that both models exhibit similar bifurcation structures and dynamical behaviors.
- 4.
- Future work: Our study suggests that further research is necessary to explore the effects of increasing the number of linear segments beyond four. A generic conclusion on the impact of adding more linear segments on the system’s dynamics could provide deeper insights into the behavior of piecewise linear systems.
5. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- van der Pol, B. Forced oscillations in a circuit with nonlinear resistance. Philos. Mag. 1927, 3, 65–80. [Google Scholar] [CrossRef]
- King, G.P.; Gaito, S.T. Bistable chaos. I. Unfolding the cusp. Phys. Rev. A 1992, 46, 3092–3099. [Google Scholar] [CrossRef] [PubMed]
- Matouk, A.E.; Agiza, H.N. Bifurcations, chaos and synchronization in ADVP circuit with parallel resistor. J. Math. Anal. Appl. 2008, 341, 259–269. [Google Scholar] [CrossRef]
- Zhao, H.; Lin, Y.; Dai, Y. Hidden attractors and dynamics of a general autonomous van der Pol–Duffing oscillator. Int. J. Bifurc. Chaos 2014, 24, 1450080. [Google Scholar] [CrossRef]
- Izhikevich, E.M. Neural excitability, spiking, and bursting. Int. J. Bifurc. Chaos 2000, 10, 1171–1266. [Google Scholar] [CrossRef]
- Glass, L.; Mackey, M.C. From Clocks to Chaos: The Rhythms of Life, 1st ed.; Princeton University Press: Princeton, NJ, USA, 1988. [Google Scholar]
- Lichtenberg, A.J.; Lieberman, M.A. Regular and Chaotic Dynamics, 2nd ed.; Springer: New York, NY, USA, 2013. [Google Scholar]
- Brock, W.A.; Hommes, C.H. A Rational Route to Randomness. Econometrica 1997, 65, 1059–1095. [Google Scholar] [CrossRef]
- Nayfeh, A.H.; Mook, D.T. Nonlinear Oscillations; WILEY-VCH: Weinheim, Germany, 2004. [Google Scholar]
- Alhejaili, W.; Salas, A.H.; El-Tantawy, S.A. Approximate solution to a generalized Van der Pol equation arising in plasma oscillations. AIP Adv. 2022, 12, 105104. [Google Scholar] [CrossRef]
- Leung, A.Y.T.; Yang, H.X.; Guo, Z.J. The residue harmonic balance for fractional order van der Pol like oscillators. J. Sound Vib. 2012, 331, 1115–1126. [Google Scholar] [CrossRef]
- Herişanu, N.; Marinca, V. An iteration procedure with application to Van der Pol oscillator. Int. J. Nonlinear Sci. Numer. Simul. 2009, 10, 353–361. [Google Scholar] [CrossRef]
- Kimiaeifar, A.; Saidi, A.R.; Bagheri, G.H.; Rahimpour, M.; Domairry, D.G. Analytical solution for Van der Pol-Duffing oscillators. Chaos Solitons Fractals 2009, 42, 2660–2666. [Google Scholar] [CrossRef]
- Ndam, J.N.; Adedire, O. Comparison of the solution of the Van der Pol equation using the modified Adomian decomposition method and truncated Taylor series method. J. Niger. Soc. Phys. Sci. 2020, 2, 106–114. [Google Scholar] [CrossRef]
- Huang, X.L.; Xu, J.; Wang, S.N. Nonlinear system identification with continuous piecewise linear neural network. Neurocomputing 2012, 77, 167–177. [Google Scholar] [CrossRef]
- Katagiri, T.; Saito, T.; Komuro, M. Lost solution and chaos. IEEE Int. Symp. Circuits Syst. 1993, 4, 2616–2619. [Google Scholar]
- Desroches, M.; Freire, E.; Hogan, S.J.; Ponce, E.; Thota, P. Canards in piecewise-linear systems: Explosions and super-explosions. Proc. R. Soc. A. 2013, 469, 20120603. [Google Scholar] [CrossRef]
- Rotstein, H.G.; Coombes, S.; Gheorghe, A.M. Canard-like explosion of limit cycles in two-dimensional piecewise-linear models of FitzHugh-Nagumo type. SIAM J. Appl. Dyn. Syst. 2012, 11, 135–180. [Google Scholar] [CrossRef]
- Arima, N.; Okazaki, H.; Nakano, H. A generation mechanism of canards in a piecewise linear system. IEICE Trans. Fundam. Electron. Commun. Comput. Sci. 1997, 80, 447–453. [Google Scholar]
- Carmona, V.; Fernández-García, S.; Teruel, A.E. Saddle-node canard cycles in slow-fast planar piecewise linear differential systems. Nonlinear Anal. Hybrid Syst. 2024, 52, 101472. [Google Scholar] [CrossRef]
- Chen, H.B.; Jia, M.; Tang, Y.L. Topological classifications of a piecewise linear Liénard system with three zones. J. Differ. Equ. 2024, 399, 1–47. [Google Scholar] [CrossRef]
- Fernández-García, S.; Desroches, M.; Krupa, M.; Teruel, A.E. Canard solutions in piecewise linear systems with three zones. Dyn. Syst. Int. J. 2016, 31, 173–197. [Google Scholar] [CrossRef]
- Li, S.; Llibre, J. Canard limit cycles for piecewise linear Liénard systems with three zones. Int. J. Bifurc. Chaos 2020, 30, 2050232. [Google Scholar] [CrossRef]
- Llibre, J.; Nuñez, E.; Teruel, A.E. Limit cycles for planar piecewise linear differential systems via first integrals. Qual. Theory Dyn. Syst. 2002, 3, 29–50. [Google Scholar] [CrossRef]
- Zegeling, A. Perturbation of a piecewise regular-singular Liénard system. J. Differ. Equ. 2024, 380, 404–442. [Google Scholar] [CrossRef]
- Roberts, A. Canard explosion and relaxation oscillation in planar, piecewise smooth, continuous systems. SIAM J. Appl. Dyn. Syst. 2016, 15, 609–624. [Google Scholar] [CrossRef]
- Roberts, A.; Gendining, P. Canard-like phenomena in piecewise-smooth Van der Pol systems. Choas 2014, 24, 023138. [Google Scholar] [CrossRef]
- Sekikawa, M.; Inaba, N.; Tsubouchi, T. Chaos via duck solution breakdown in a piecewise linear van der Pol oscillator driven by an extremely small periodic perturbation. Phys. D 2004, 194, 227–249. [Google Scholar] [CrossRef]
- di Bernardo, M.; Budd, C.J.; Champneys, A.R.; Kowalczyk, P. Piecewise-Smooth Dynamical Systems Theory and Applications, 1st ed.; Spring: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Krylov, N.M.; Bogoliubov, N.N. Introduction to Non-Linear Mechanics, 1st ed.; Princeton University Press: Princeton, NJ, USA, 1950. [Google Scholar]
- Llibre, J.; Ordóñez, M.; Ponce, E. On the existence and uniqueness of limit cycles in planar continuous piecewise linear systems without symmetry. Nonlinear Anal.-Real 2013, 14, 2002–2012. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| r | Set | |||||||
|---|---|---|---|---|---|---|---|---|
| 1 | S-N | I | ||||||
| 1 | S-N | I | ||||||
| U-N | II | |||||||
| U-F | II | |||||||
| U-N | III | |||||||
| U-F | III | |||||||
| U-F | IV | |||||||
| U-N | IV | |||||||
| U-F | V | |||||||
| U-N | V |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, W.; Cao, N.; Liu, X. Bifurcation and Dynamics Analysis of a Piecewise-Linear van der Pol Equation. Axioms 2025, 14, 197. https://doi.org/10.3390/axioms14030197
Li W, Cao N, Liu X. Bifurcation and Dynamics Analysis of a Piecewise-Linear van der Pol Equation. Axioms. 2025; 14(3):197. https://doi.org/10.3390/axioms14030197
Chicago/Turabian StyleLi, Wenke, Nanbin Cao, and Xia Liu. 2025. "Bifurcation and Dynamics Analysis of a Piecewise-Linear van der Pol Equation" Axioms 14, no. 3: 197. https://doi.org/10.3390/axioms14030197
APA StyleLi, W., Cao, N., & Liu, X. (2025). Bifurcation and Dynamics Analysis of a Piecewise-Linear van der Pol Equation. Axioms, 14(3), 197. https://doi.org/10.3390/axioms14030197