1. Introduction
A precision conductive slip ring is often used in rotating electrical assemblies to make a continuous electrical connection for power and signal transmission between stationary and rotating parts. As a key component of various precision equipment, it is widely used in aerospace, aviation, navigation, nuclear power, wind power, high-speed railway, machine tools and other industrial areas [
1,
2]. For example, the precision conductive slip ring acts as a key single point failure component in solar array drive assembly (SADA), and it is responsible for the transmission of power and control signals between the solar panel and the spacecraft during the sun tracking. Once the slip ring fails, the signal cannot be transmitted to the solar cell wing side, and it is even possible that the power supply of the whole satellite will be abnormal, resulting in the failure of the whole satellite mission. Therefore, the reliability and service lifetime of precision conductive slip rings are very important for spacecraft, which puts forward high requirements for its manufacturing quality.
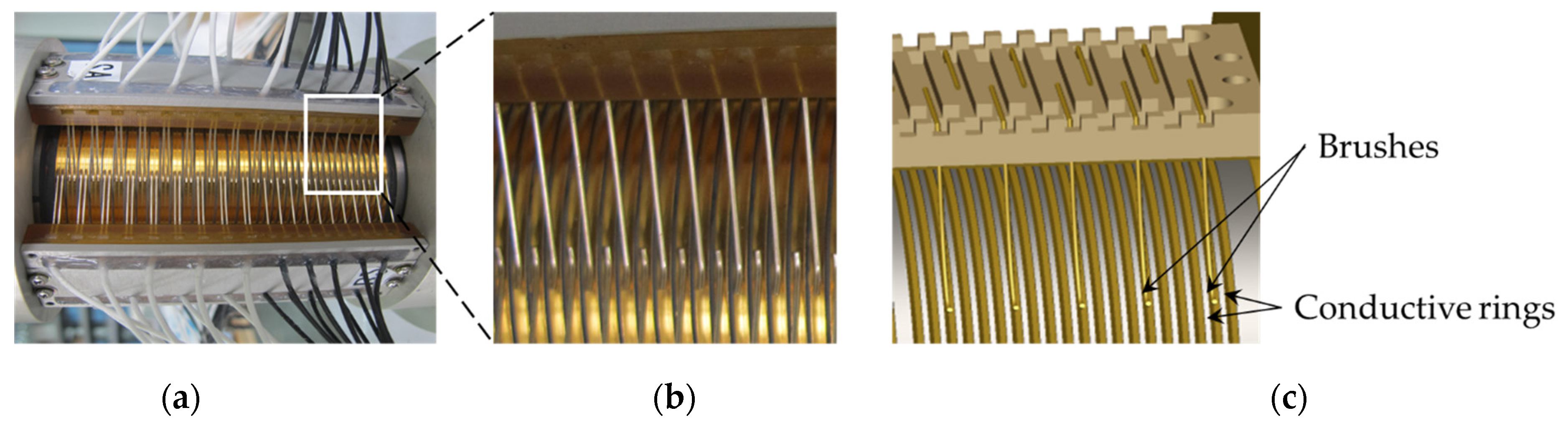
As shown in
Figure 1, the conductive slip ring is mainly composed of an insulating ring, conductive ring, brush, combined support and bearing. The wire type cylindrical brush contacts with the V-shaped circumferential groove with a certain pressure to ensure the stable transmission of electrical power and signals. In addition, in the slip ring assembly process, the alignment accuracy between the brush and the ring groove directly affects the dynamic contact resistance and further affects the reliability and service lifetime of conductive slip ring. This is because if the alignment is inaccurate, the friction torque between the brush and the ring groove will be increased under the influence of the lateral gradient contact force, resulting in a large change in the dynamic contact resistance, and in some serious cases, this may lead to short-circuit fault and on-board failure of the slip ring.
Currently, the brush alignment assembly is performed manually by the manual visual alignment operation with the aid of a magnifier. Thus, the alignment accuracy of the brush and the ring groove largely depends on the operator’s experience and skill level. This may lead to the problem that the alignment accuracy cannot be guaranteed, resulting in low assembly consistency and efficiency for the conductive slip ring. Moreover, the brush alignment accuracy cannot be quantitively evaluated and, further, recorded digitally.
With the improvements in computer performance and camera resolution, as well as the image processing algorithms, machine vision has been widely used in industrial areas [
3], such as surface defect inspection [
4], part machining [
5], package sorting [
6] and product assembly [
7]. Compared with manual visual detection, machine vision has the advantages of being non-contact, high accuracy and having a wide detection range, which can avoid human mistakes and improve the detection accuracy and efficiency [
8]. Therefore, many scholars have conducted related research on how to apply machine vision into the conductive slip ring, which can be mainly divided into two categories: assembly position detection [
9,
10,
11] and brush wire angle measurement [
12,
13].
As for assembly position detection, Jiang developed an on-machine vision measurement system for machining the ring grooves of the conductive slip ring [
9]. The images of the conductive slip ring are captured by an industrial camera, the central positions of the conductive rings are extracted, and the machining code is generated accordingly, which greatly improves the machining accuracy and efficiency. Dong [
10] developed a micro- groove position detection system for conductive slip rings based on machine vision. Through preprocessing and edge extraction of the image collected by the camera, the machining code of CNC machine tool is generated. The automatic processing of the micro-groove ensures the processing accuracy and improves the processing efficiency. Guo [
11] proposed a method for detecting the precise assembly position of conductive slip rings based on line structured light, which realized the automatic position detection and improved the detection efficiency under the premise of ensuring micron-level accuracy. However, the effectiveness of the 3D position detection and the accuracy of semi-occlusion detection cannot be guaranteed.
In terms of brush wire angle measurement, Li [
12] proposed a method of measuring and controlling the angle of the conductive ring brush wire based on machine vision. By establishing the pre-compensation model of brush wire rebound and setting up the brush angle forming and measuring device, the accurate control of angle output value is realized. Wang [
13] applied machine vision into the brush wire angle measurement and contact pressure detection. Via the detection algorithm of the brush wire angle, the rebound angle of brush wire is measured with high accuracy, and the actual contact pressure value between the brush wire and the slip ring is calculated through the visual detection.
In this paper, we propose an in-situ machine vision method to measure the ring groove positions and track the relative brush positions, and develop a vision-aided brush alignment assembly system for precision conductive slip rings. This system can provide quantitative relative position deviation for the precise alignment of the brush and the ring groove, ensuring the high alignment accuracy and efficiency during the brush alignment assembly process. The rest of this paper is organized as follows:
Section 2 describes the design and the working flow of the brush assembly system.
Section 3 details the vision measurement methods for the ring groove measurement and brush tracking during assembly.
Section 4 gives the system calibration method. The system development and some experiments are presented in
Section 5. Lastly,
Section 6 concludes this paper.
2. Vision-Aided Brush Assembly System Design
2.1. Optical and Mechanical System Design
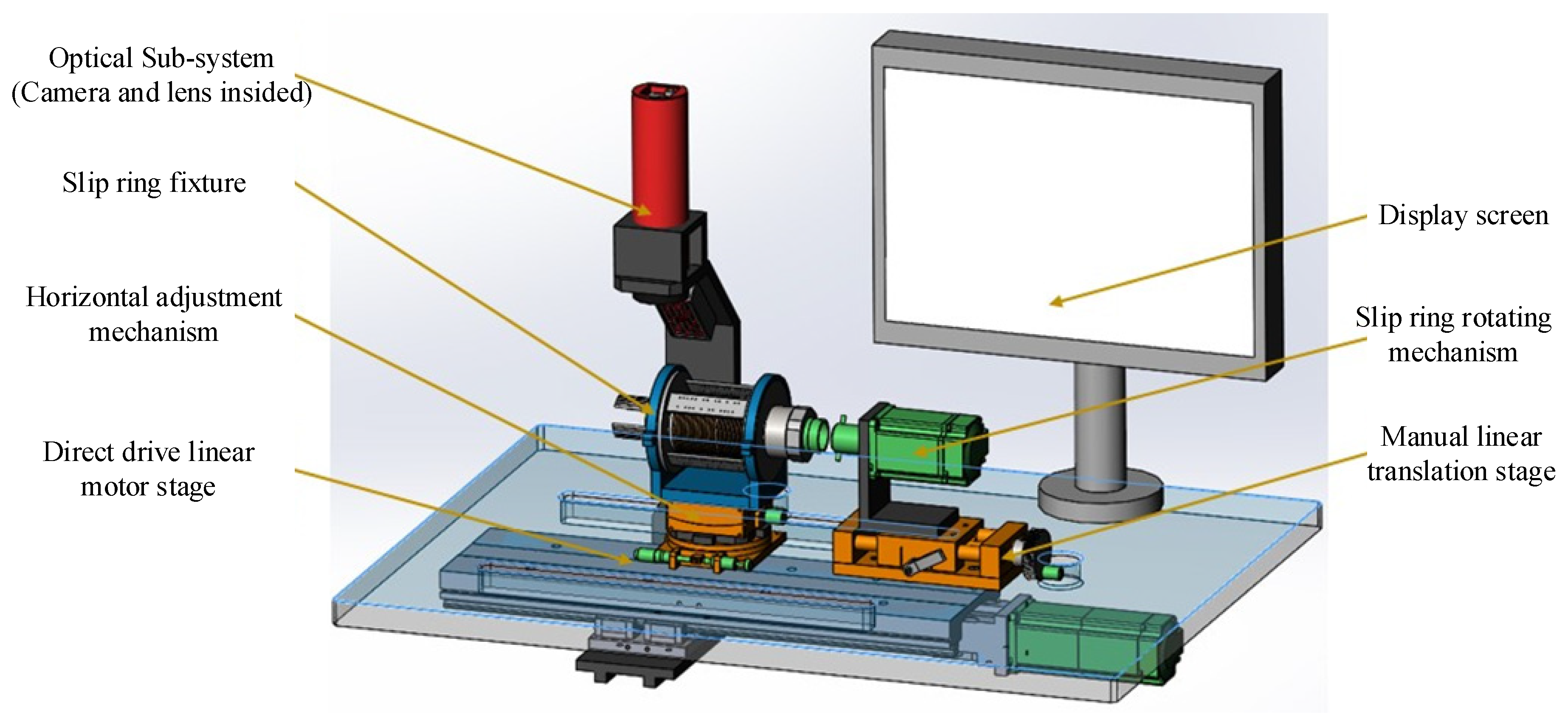
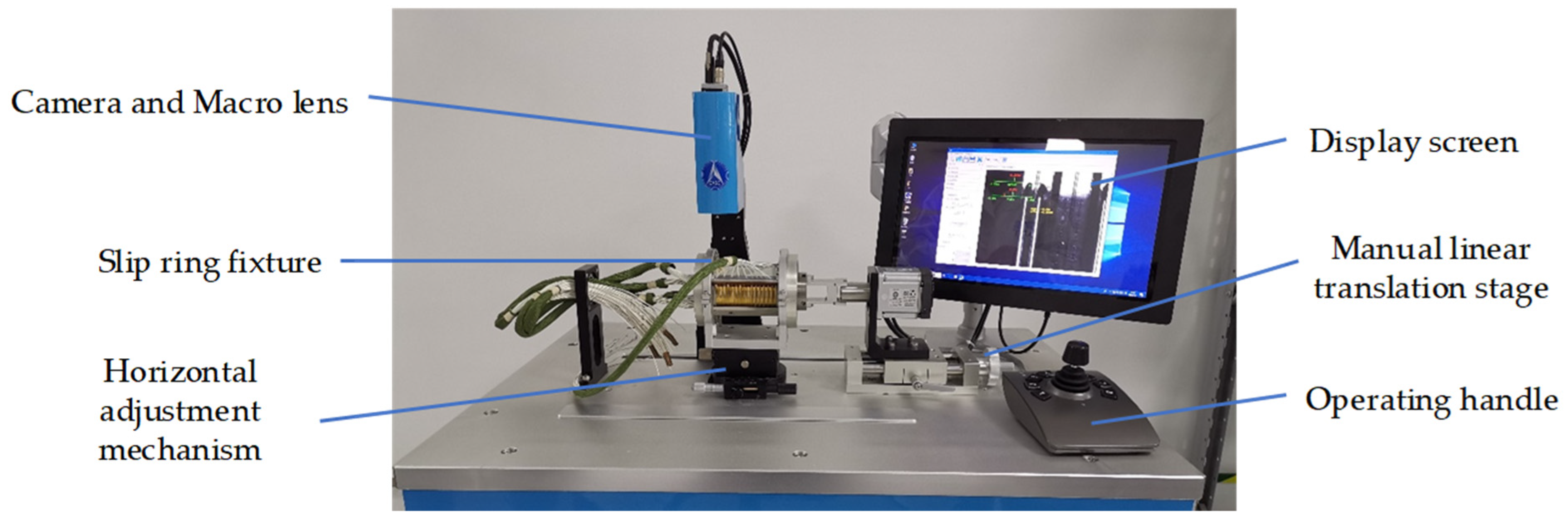
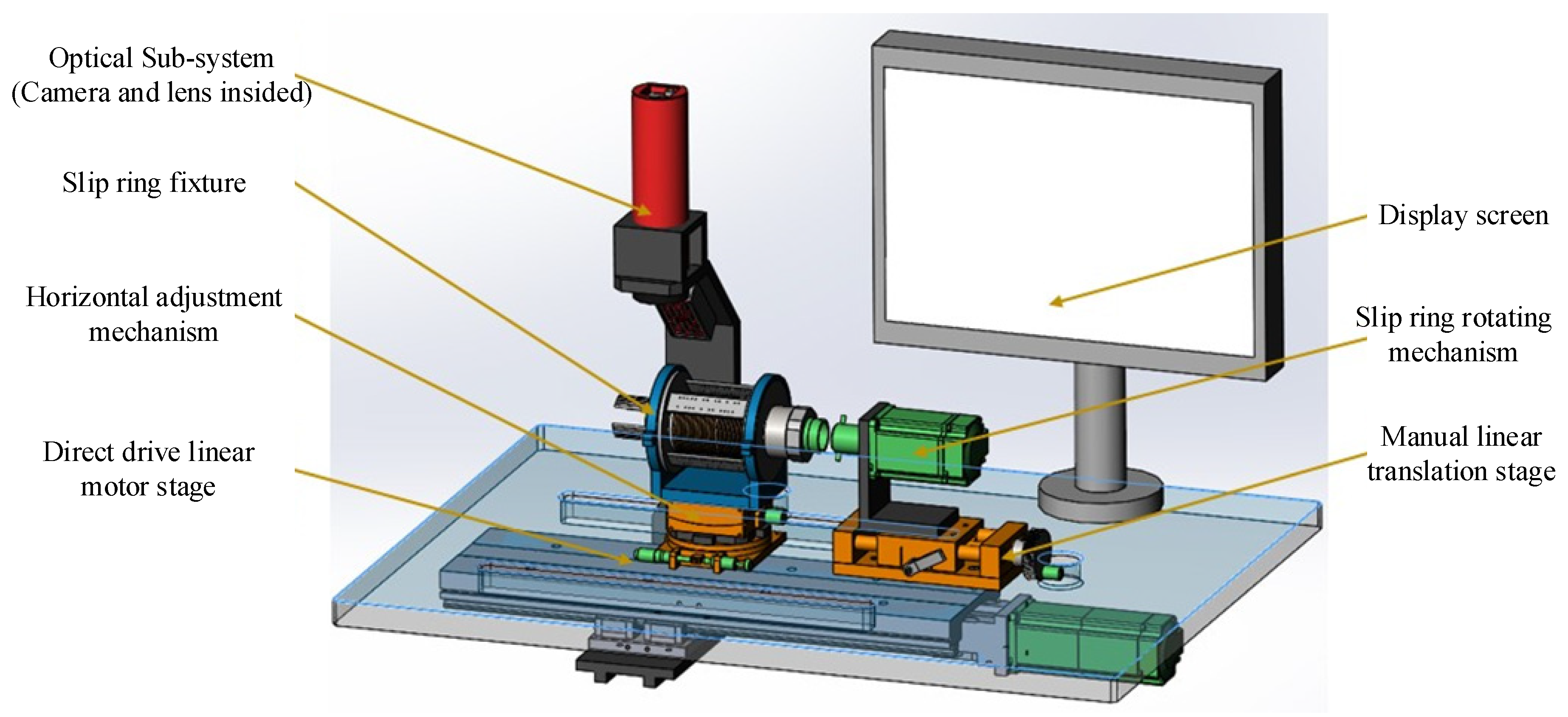
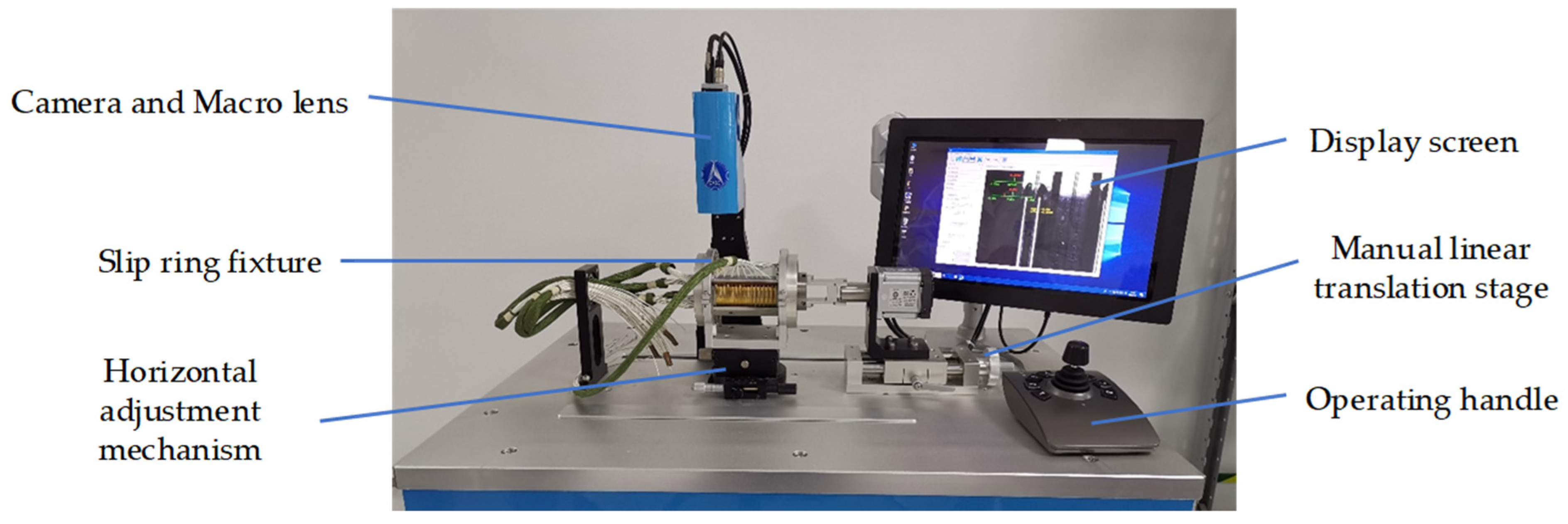
As illustrated in
Figure 2, the vision-aided brush alignment assembly system for precision conductive slip rings is mainly composed of an optical and a mechanical sub-system. The optical sub-system consists of an industrial camera, a macro lens, a line laser source, as well as an infrared light source. It has two working modes depending on the different light source projected. The line laser source is used with the camera to capture the images for further extraction of the ring groove positions, and the infrared light source is used for the brush position tracking during the brush assembly process.
The mechanical sub-system includes a slip ring fixture, a horizontal adjustment mechanism, slip ring rotating mechanism, a direct drive linear motor stage and a manual linear translation stage. When measuring, the precision conductive slip ring is first fixed by two ring clamps on the fixture. Then the two axes of the horizontal adjustment mechanism are adjusted until the axis of the slip ring is nearly parallel to the translating direction of the direct drive linear motor stage. By driving the manual linear translation stage forward, the slip ring rotating mechanism is connected to the rotary shaft of the slip ring. The optical sub-system is mounted on the direct drive linear motor stage under the worktable and can measure all the ring grooves along the translation range. During the measurement process, the optical sub-system obtains images from the top for analysis, and uses the rotating mechanism to measure four quadrant positions of the ring groove. The positions of the ring grooves and the brush pose deviation can be calculated and showed on the display screen simultaneously, thus can give adjustment guidance to assist the operators to assemble the brushes more quickly and precisely.
2.2. System Measurement Procedures
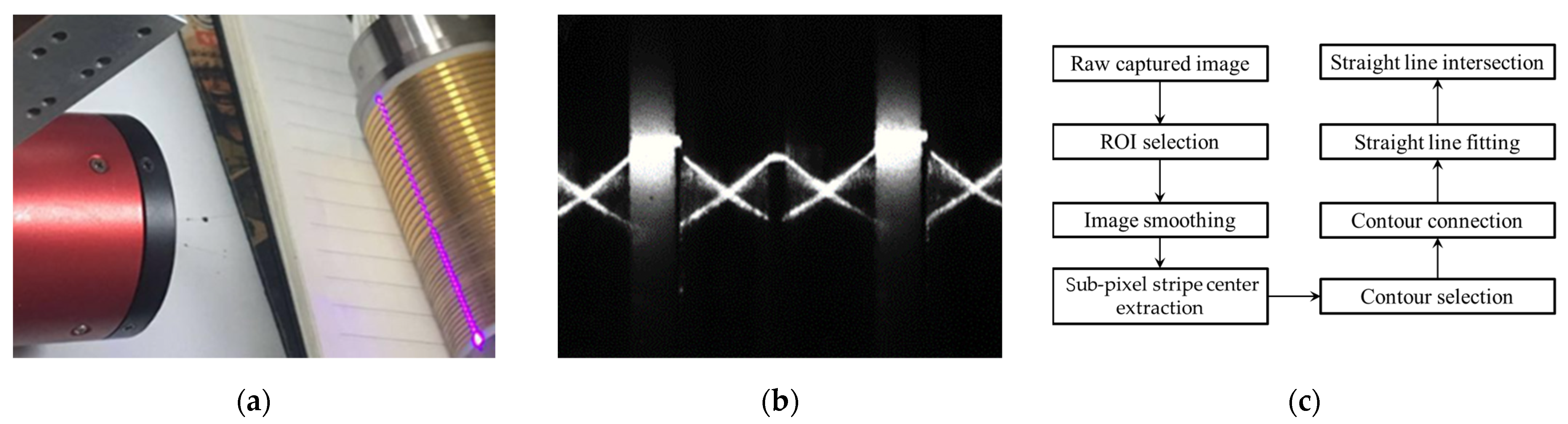
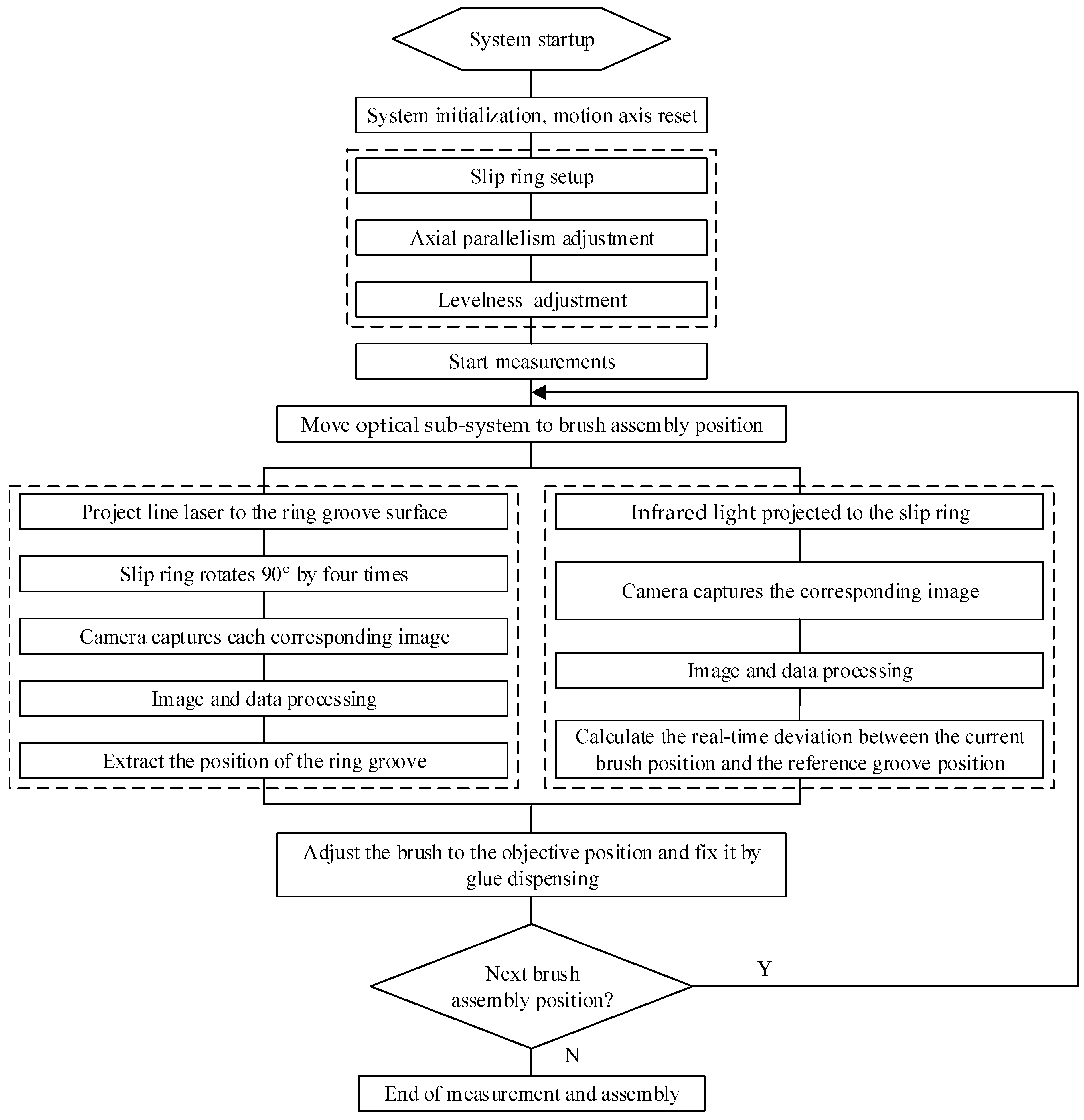
The measurement procedures of groove position and brush position for the vision-aided brush alignment assembly system is described in
Figure 3. First of all, the system is started and its motion axes are reset to accomplish the system initialization. Before the actual measurement, the conductive slip ring is fixed and adjusts its axial parallelism and levelness to make its axis parallel to the translating direction of the linear motor stage. The system measures the groove and brush positions one by one in a sequential way along the translating direction of the optical sub-system.
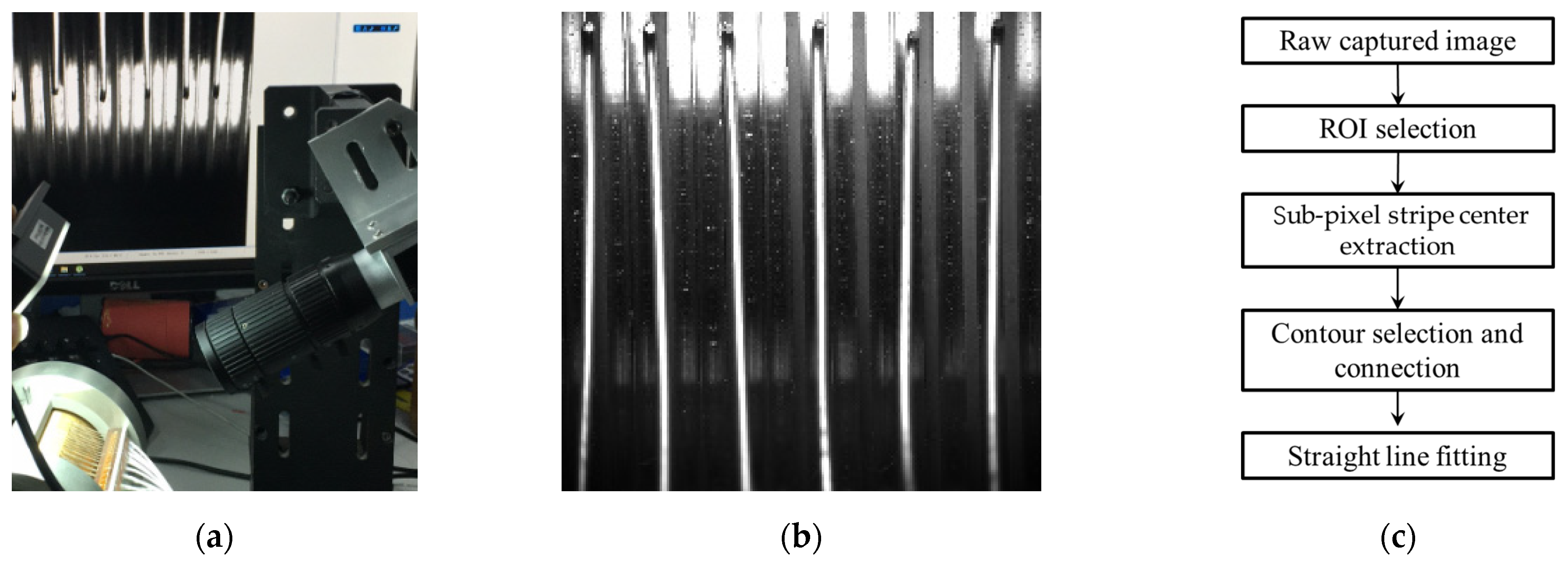
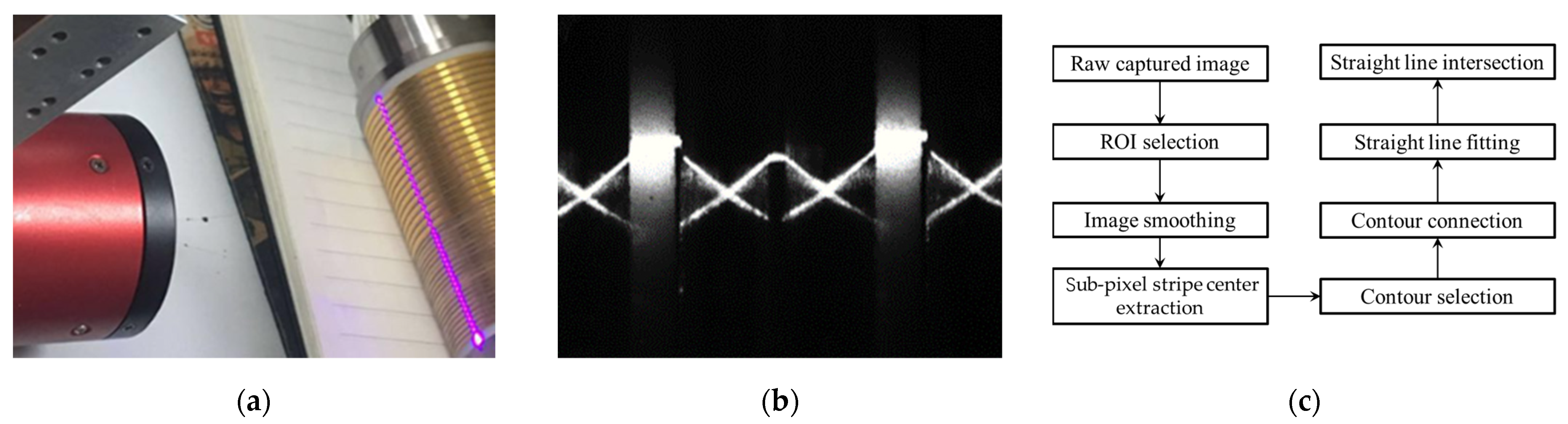
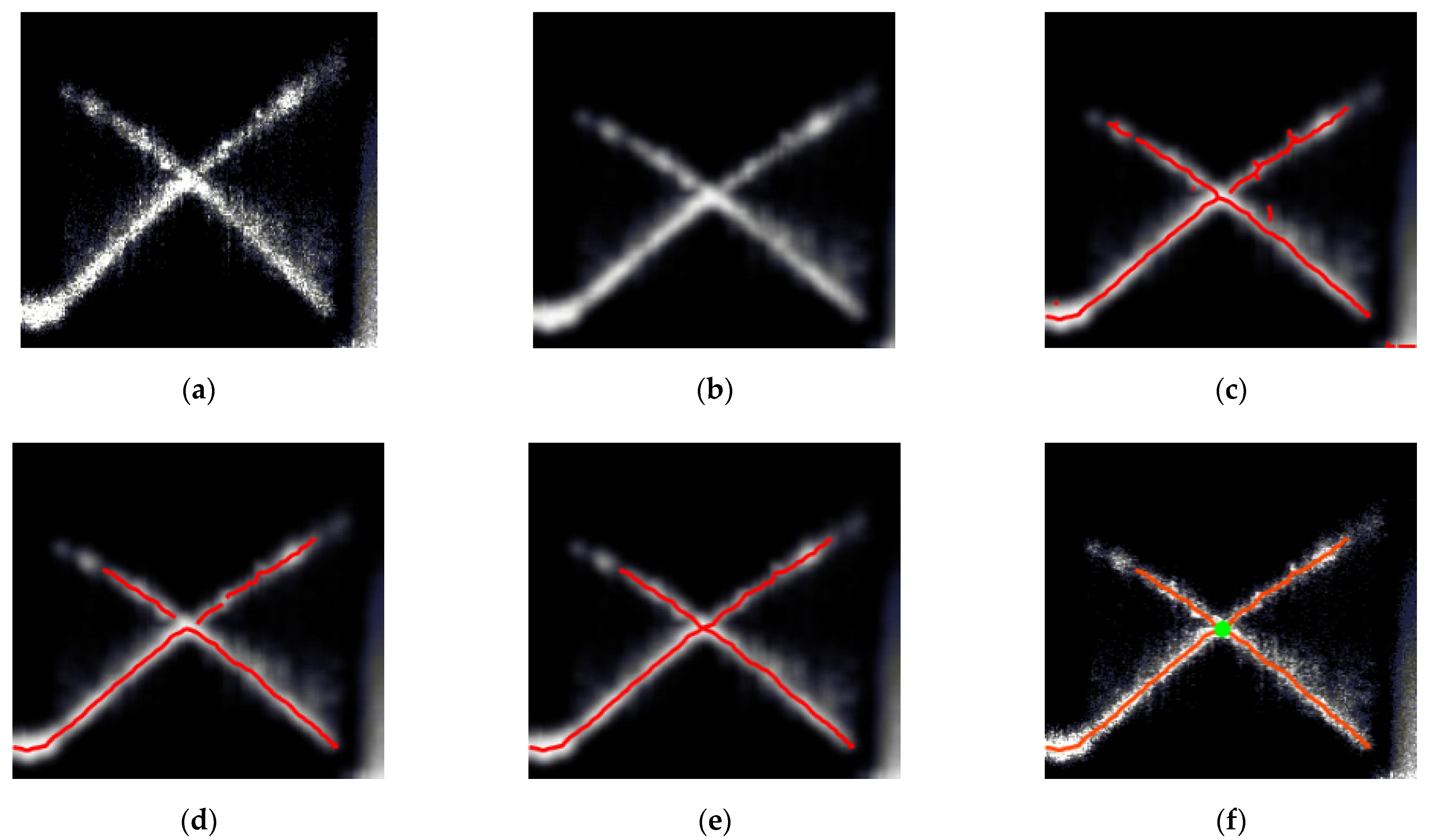
During one measurement, the optical sub-system mounted on the direct drive linear motor stage is moved to the theorical position of the specific conductive ring. In order to measure the groove positions, the line laser is projected onto the ring groove surface, and the slip ring is rotated by 90° four times and the camera captures each corresponding image, respectively. The image and data processing are then carried out to extract the mean value of the ring groove position as the target position of the brush alignment assembly.
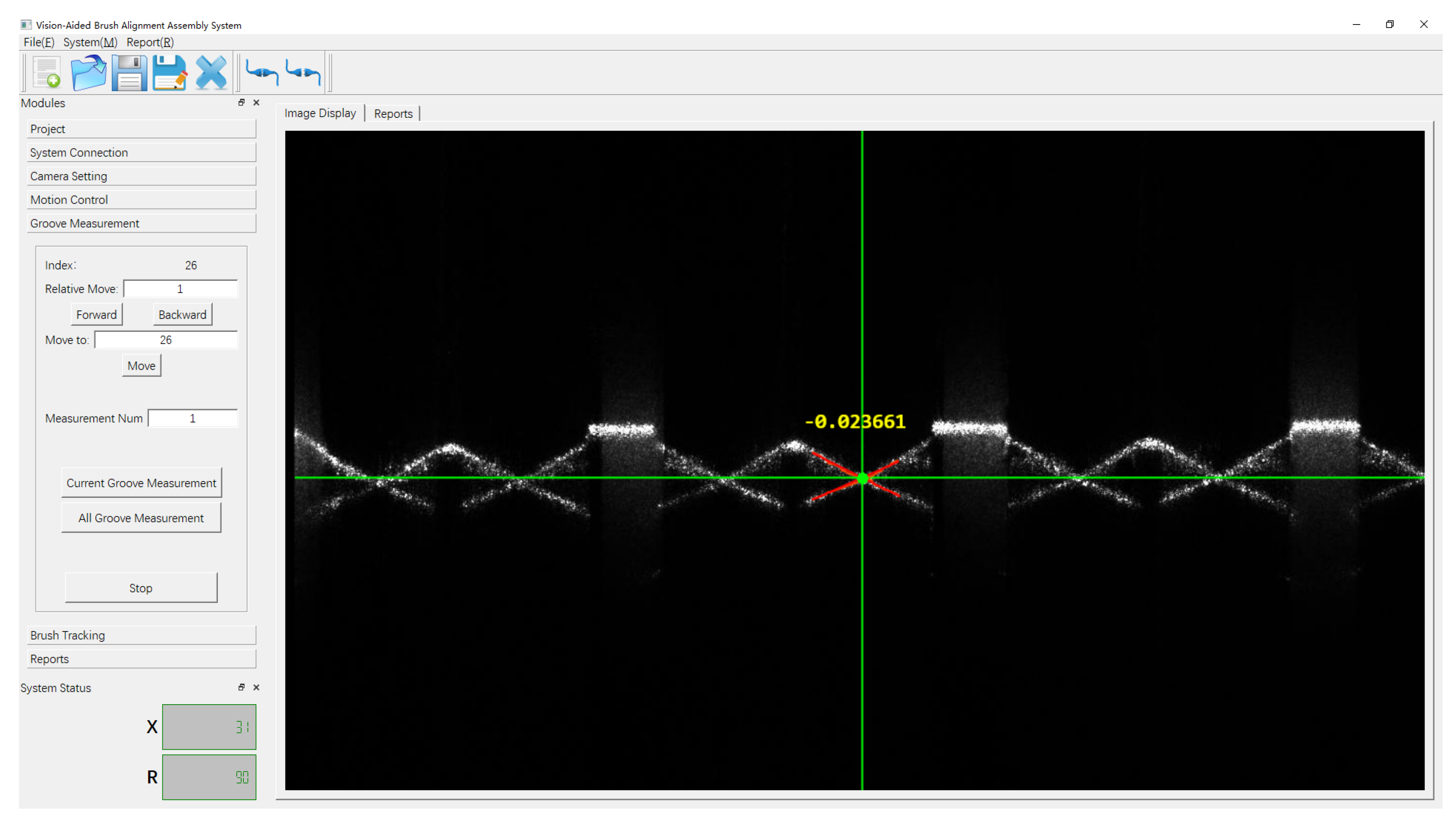
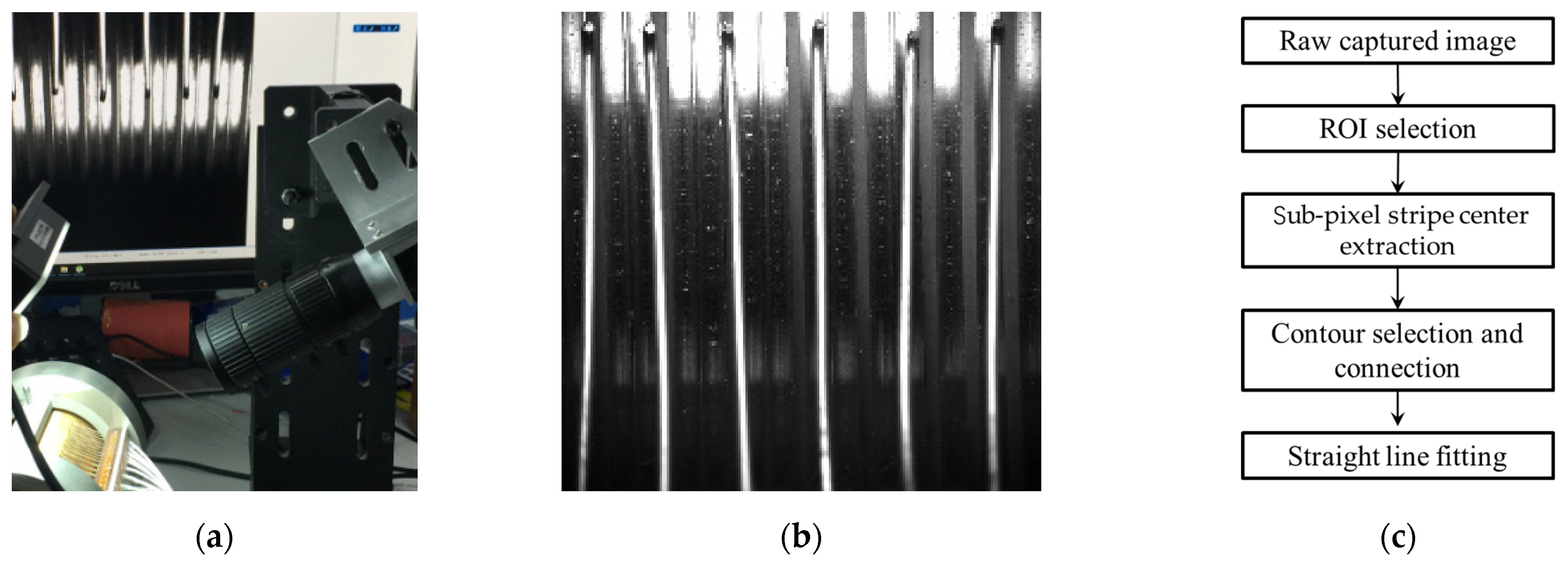
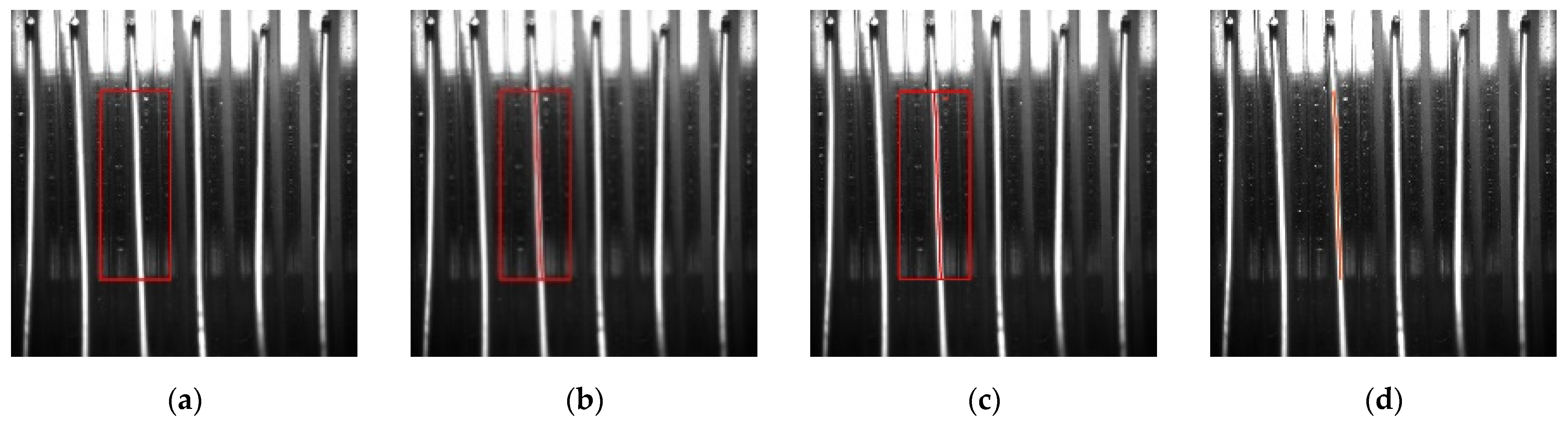
In order to track the relative brush position with respect to the groove, the infrared light is projected onto the slip ring from the side. Then, the camera captures the corresponding brush image, and image and data processing are adopted to calculate the deviation between the current brush position and the reference groove position. Based on this, the brush can be adjusted to its proper position and then is fixed by glue dispensing to finish the brush assembly at its current position. The optical sub-system then can be moved to the other groove positions to complete the entire brush assembly.
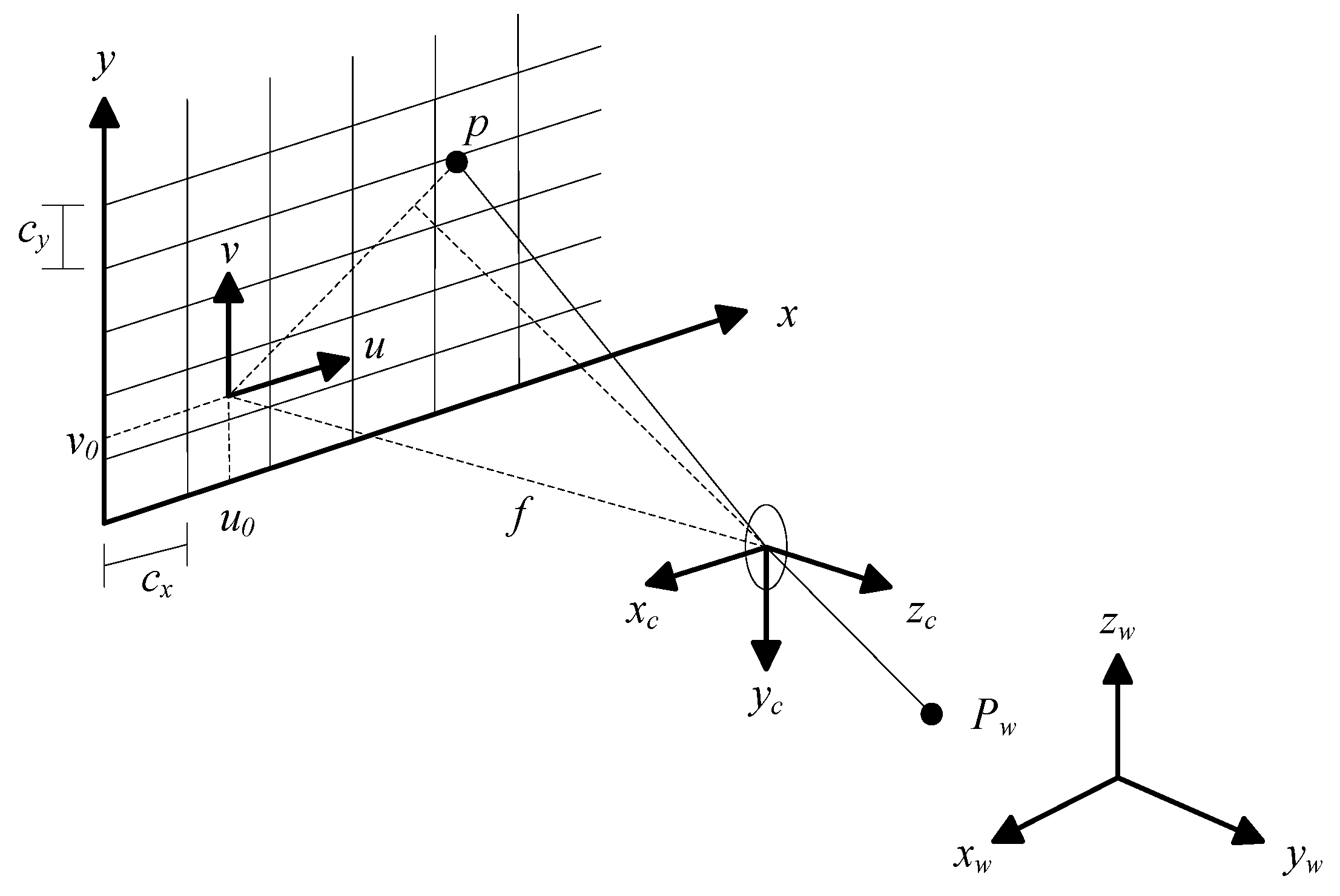
4. Calibration of the Optical Imaging System
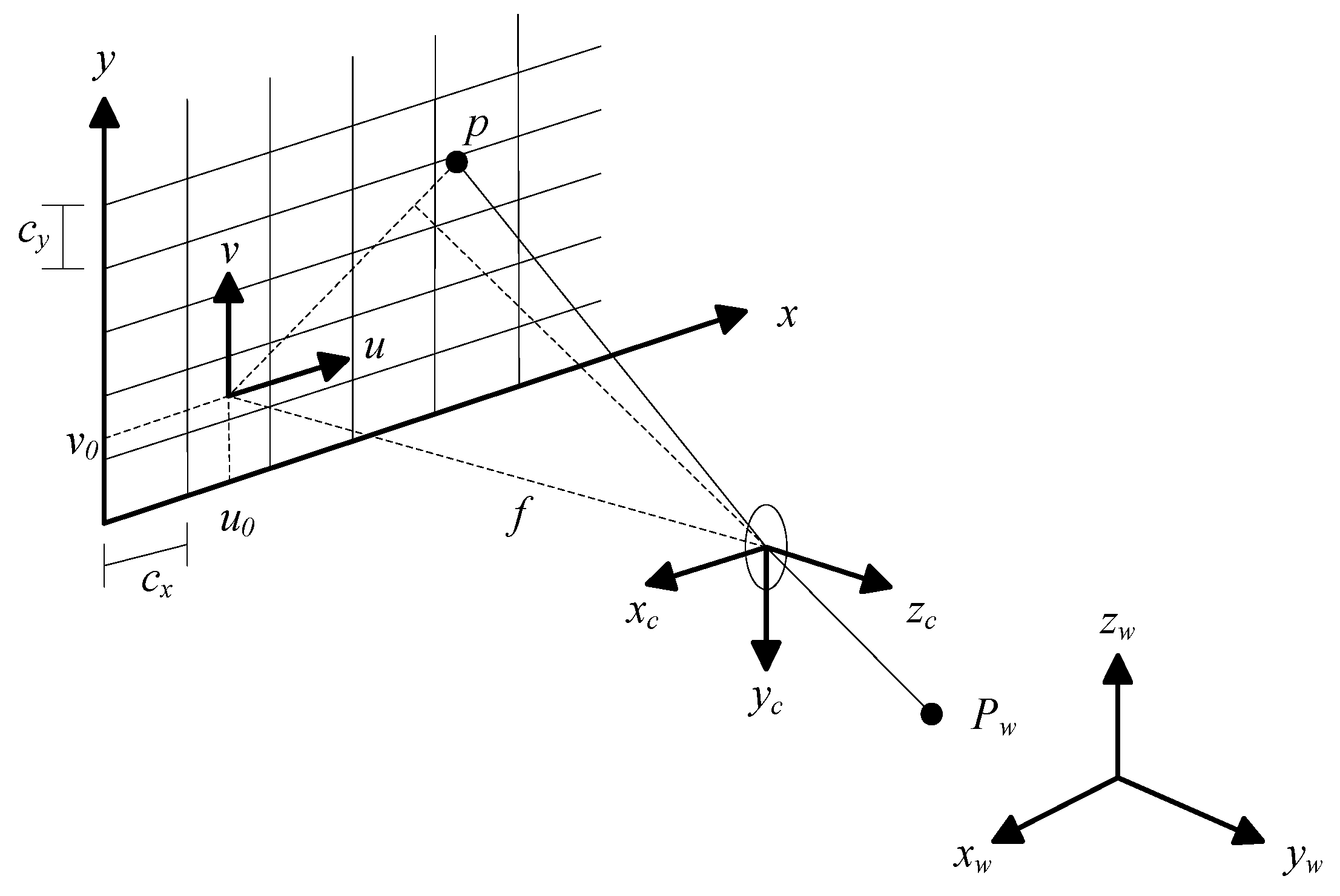
As presented in
Figure 8, the calibration of the optical imaging system is to establish the coordinate conversion relationship from the spatial point
represented in the world coordinate system
to the corresponding projection point
represented in the pixel coordinate system
. There are enough known spatial points in the world coordinate system as well as their corresponding projection points in the pixel coordinate system to establish the coordinate conversion relationship, and further to calculate the internal and external parameters of the camera [
19].
The calibration model of the optical imaging system is based on the pinhole model, and its mathematical expression is represented as follows [
20]:
where
is the spatial point represented in the world coordinate system;
and
represent the rotation matrix and translation vector from the world coordinate system to the camera coordinate system, respectively;
is the corresponding
Z-axis coordinate represented in the camera coordinate system;
represents the focal length;
is the origin of the image coordinate system represented in the pixel coordinate system;
is the corresponding projection point represented in the pixel coordinate system;
and
are the numbers of pixels per unit distance represented in the image coordinate system,
,
.
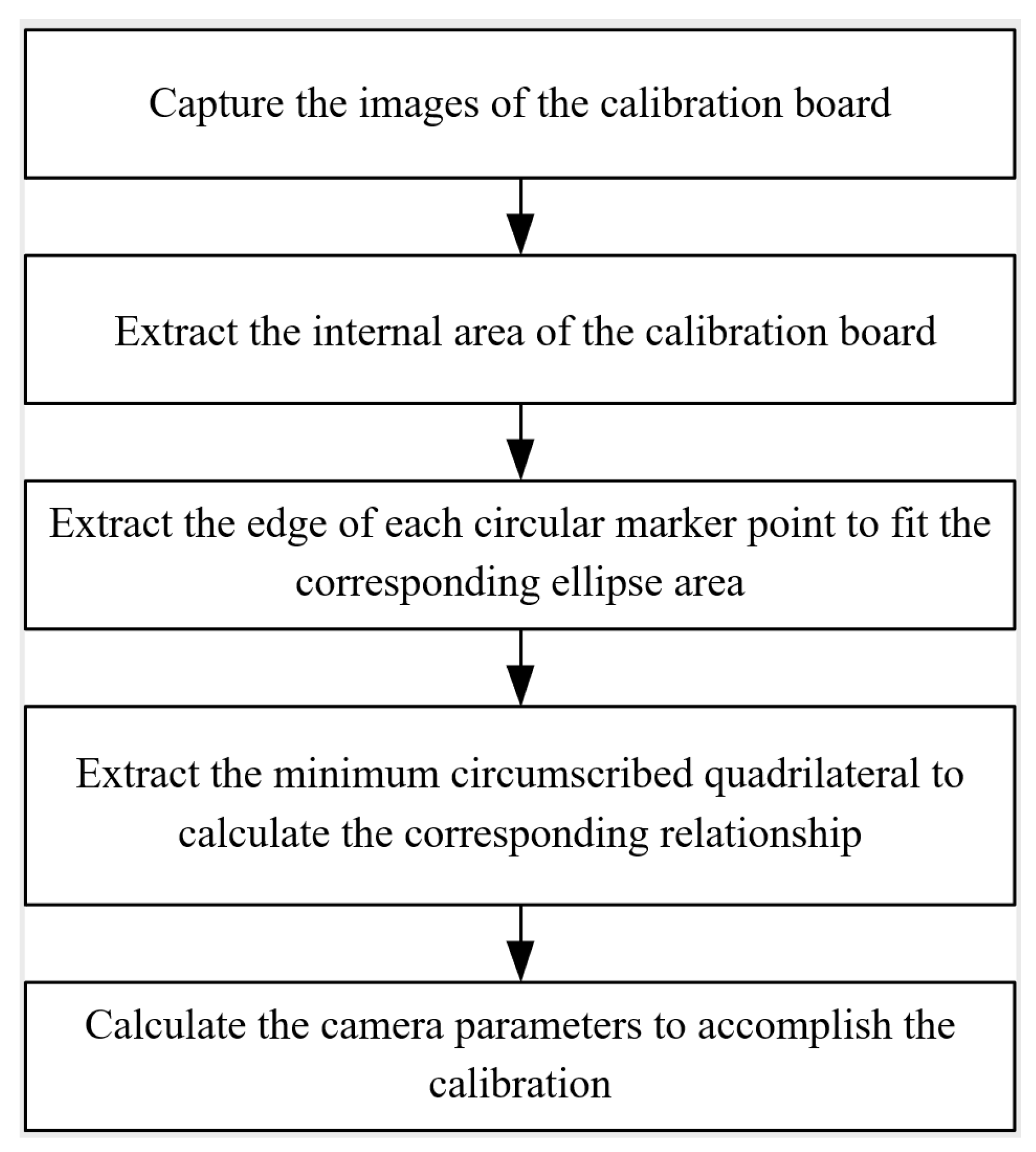
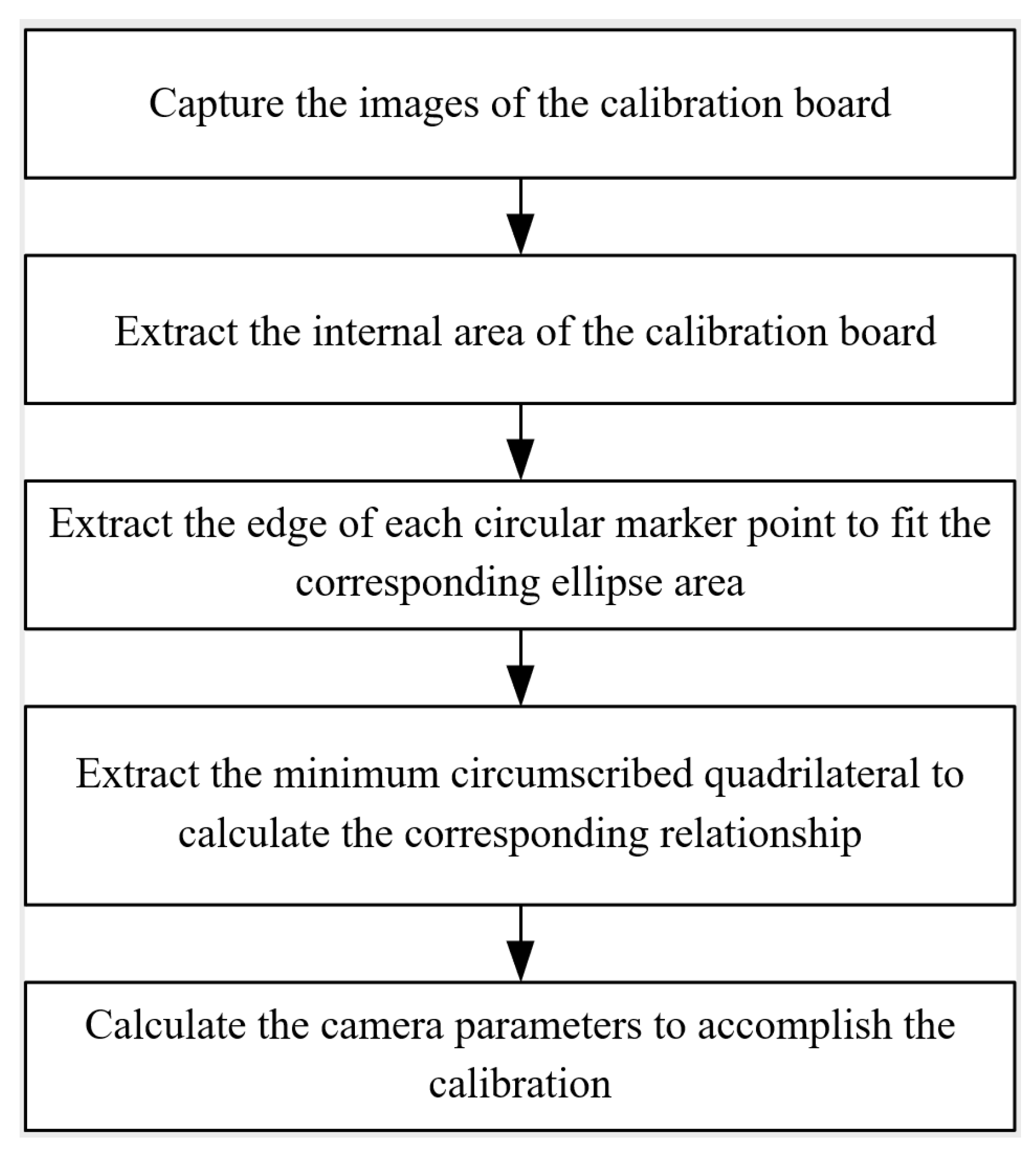
As shown in
Figure 9, the calibration of the optical imaging system can be completed by using a high-precision circular calibration board. Firstly, capture the images of the circular calibration board; Secondly, extract the internal area of the calibration board by image segmentation; Thirdly, extract the edge of each circular marker point of the calibration board to fit the corresponding ellipse area; Fourthly, extract the minimum circumscribed quadrilateral belonging to each ellipse area and calculate the corresponding relationship between each circular marker point and each projection point; Finally, calculate the camera parameters to accomplish the calibration.


 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}