Polygonal Wear Mechanism of High-Speed Train Wheels Based on Lateral Friction Self-Excited Vibration


Abstract
:1. Introduction
2. Conditions of Polygonal Wear
2.1. Model of Wheel Circumference Wear Depth
2.2. The Conditiom of Polygonal Wear
- (1)
- The wear depth at a certain position around the wheel is the same for each wheel rolling circle when the tangential vibration frequency is an approximate integer multiple of the wheel rotational frequency. The wear peak always emerges in certain regions, and the wheel circumference will become polygonal after a long period.
- (2)
- When the tangential vibration frequency is not an approximate integer multiple of the wheel rotational frequency, and the wear depth at a certain spot around the wheel varies within two rounds of wheel rolling. The last circle’s highest point of wear may wear less. After a long period of operation, the wheel circumference will be consistent, and polygonal wear will not be visible.
3. Analysis of Lateral Self-Excited Vibration of Wheel–Rail Contact
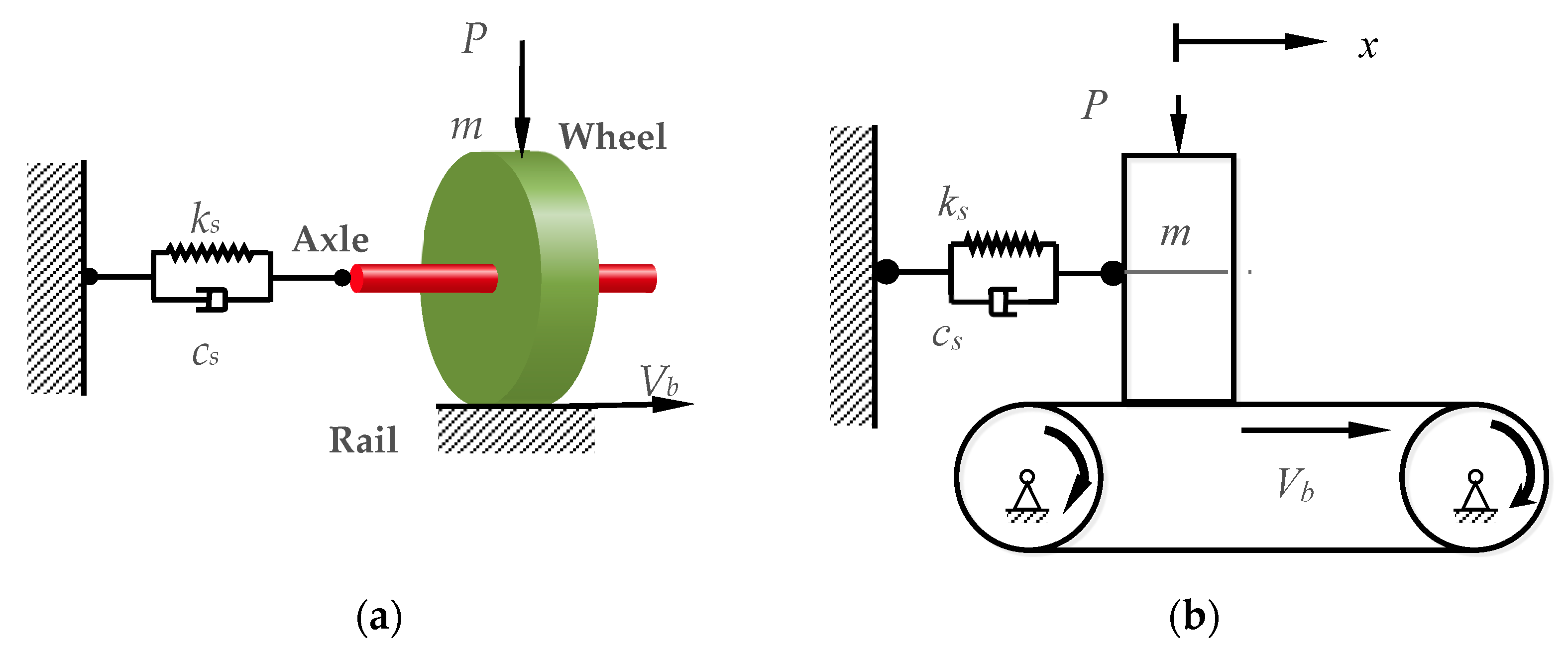
3.1. Model of Lateral Self-Excited Friction Vibration of Wheel
- (1)
- The wheel–rail contact is simplified to cylinder–plane contact by ignoring the slope of the tread and the curvature of the rail.
- (2)
- Owing to the symmetry of the wheelset and track construction, only half of the wheel–rail subsystem is chosen.
- (3)
- The axle is considered a massless elastic entity, with the mass centered on the wheel. The symmetrical constraint is placed on the symmetrical surface, and the connection mode of wheel and axle is equivalent to the lateral stiffness damping provided by the flexibility of 1/2 axle and 1 wheel.
- (4)
- The sprung mass of the vehicle body and the under foundation of the rail are simplified into wheel load P, which includes static load P0 and dynamic load ΔP, and the rail rigidity is assumed to be infinite.
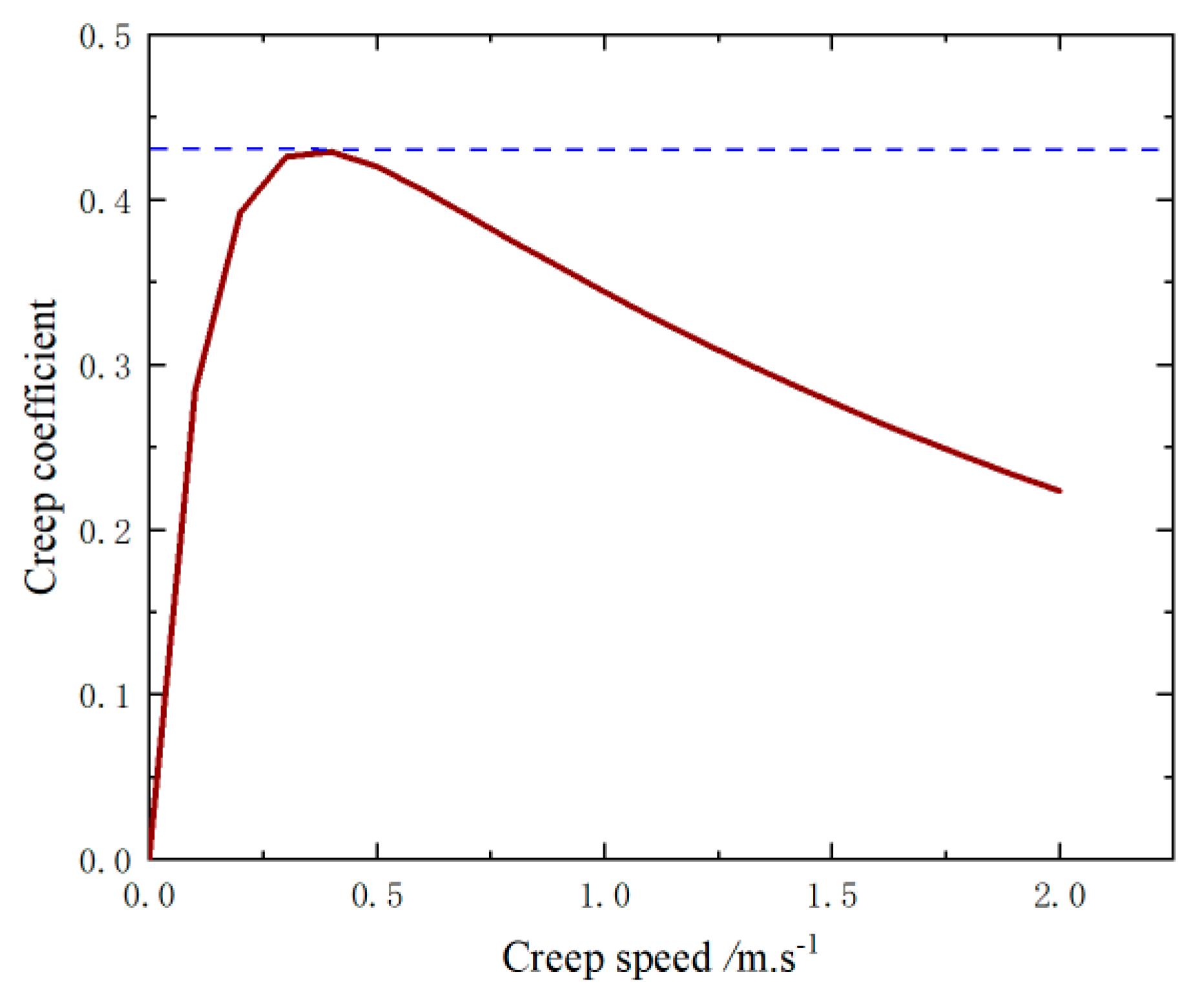
3.2. LuGre Friction Model
3.3. Wheel Rail Vertical Force Model
3.4. The Lateral Stiffness of the Wheel Is Determined
3.5. Analysis of System Stability
4. The Numerical Simulation
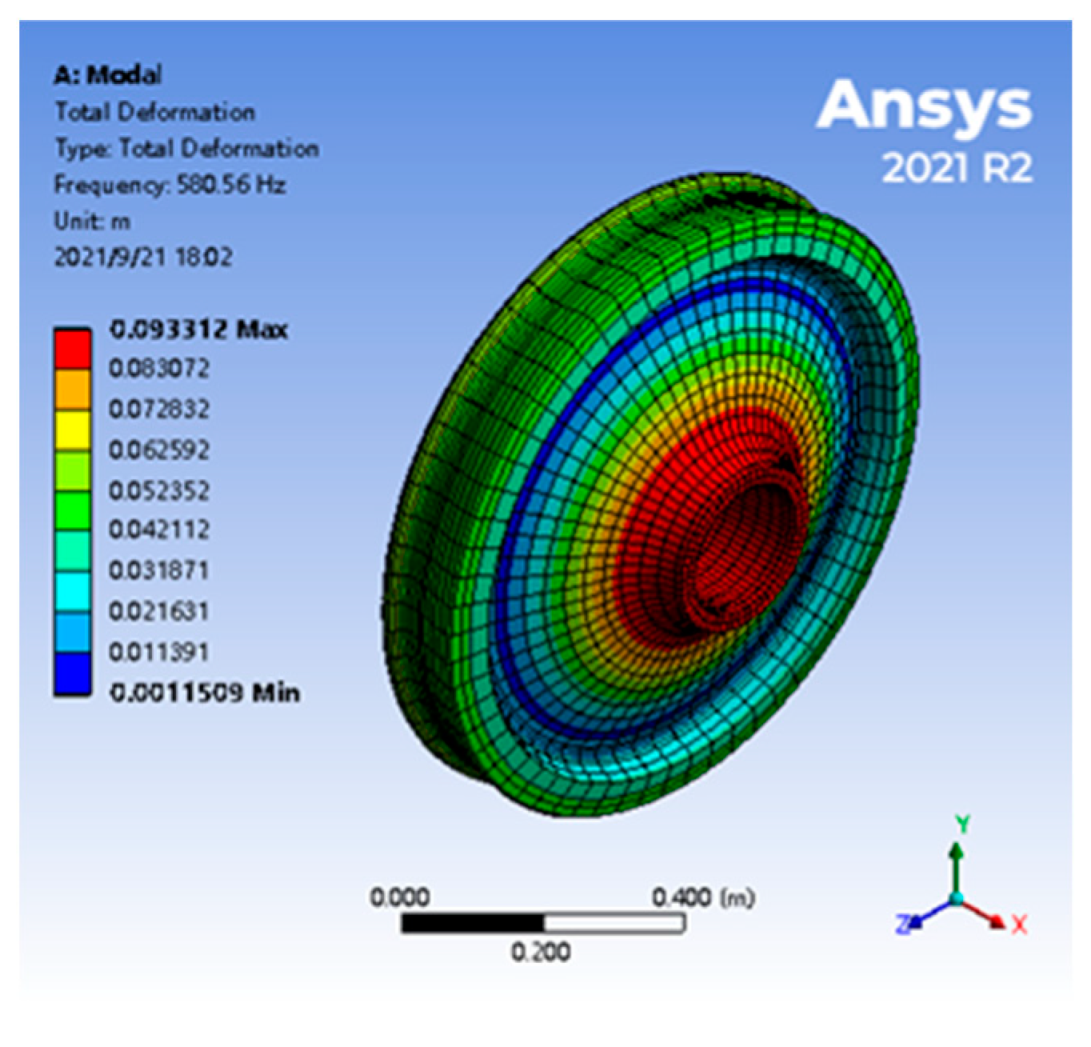
4.1. Wheel Modal Parameters
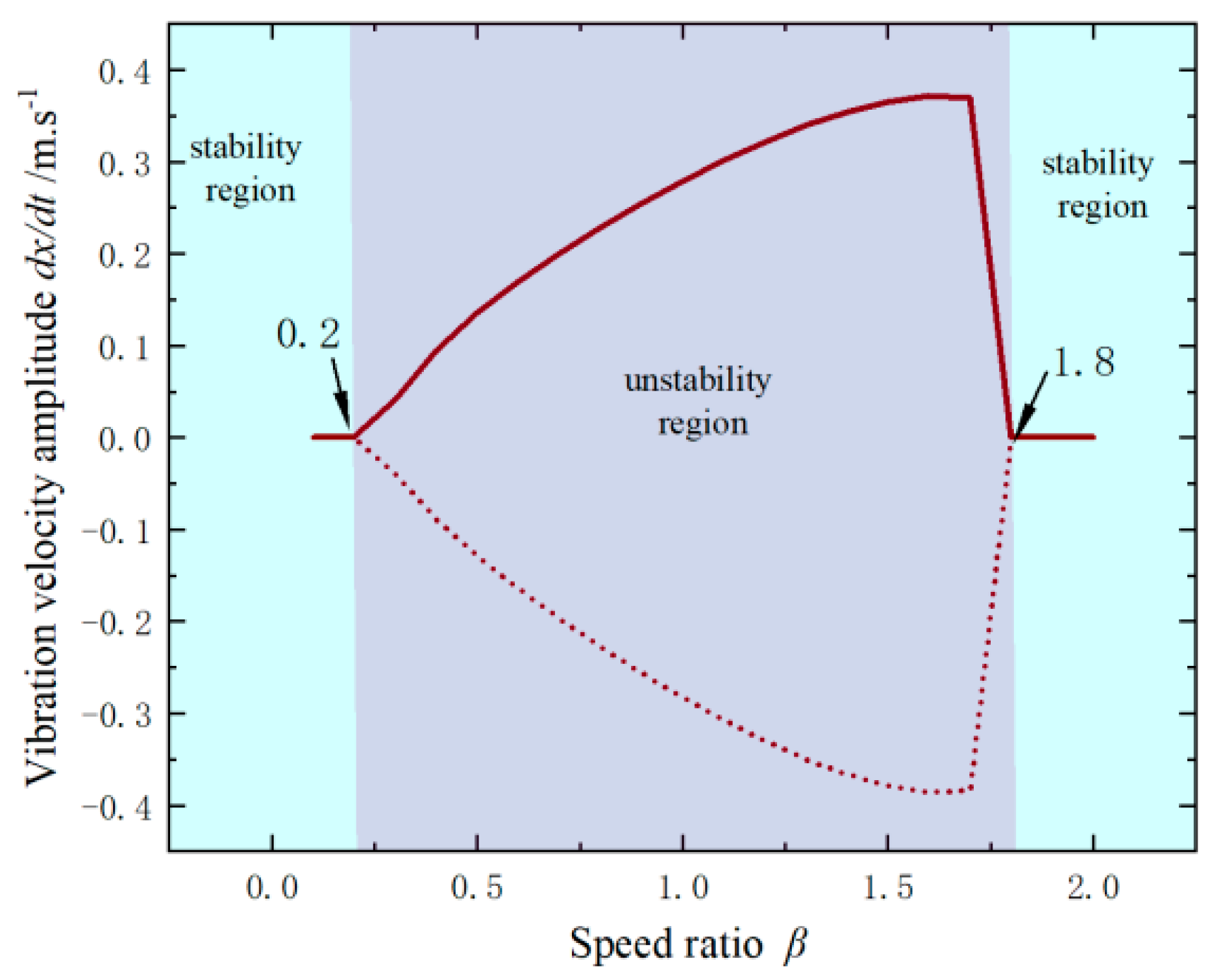
4.2. System Bifurcation Point Is Determined
4.3. Influence of Parameters on Self-Excited Vibration Characteristics
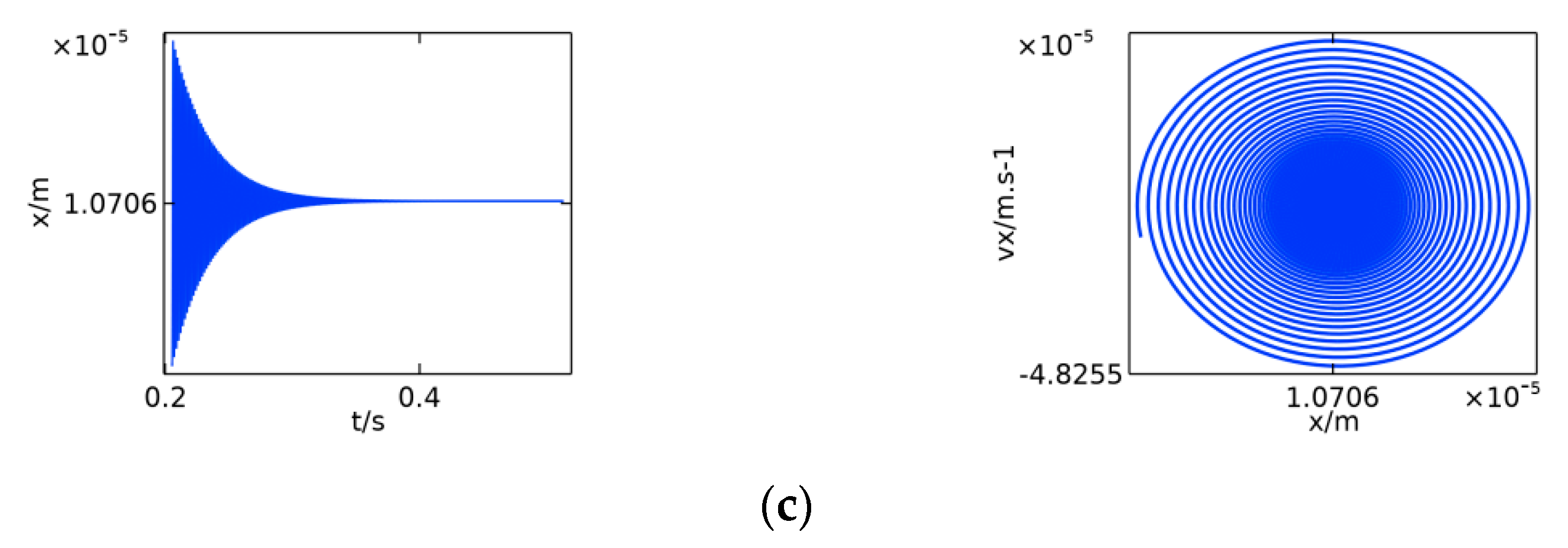
4.3.1. Speed
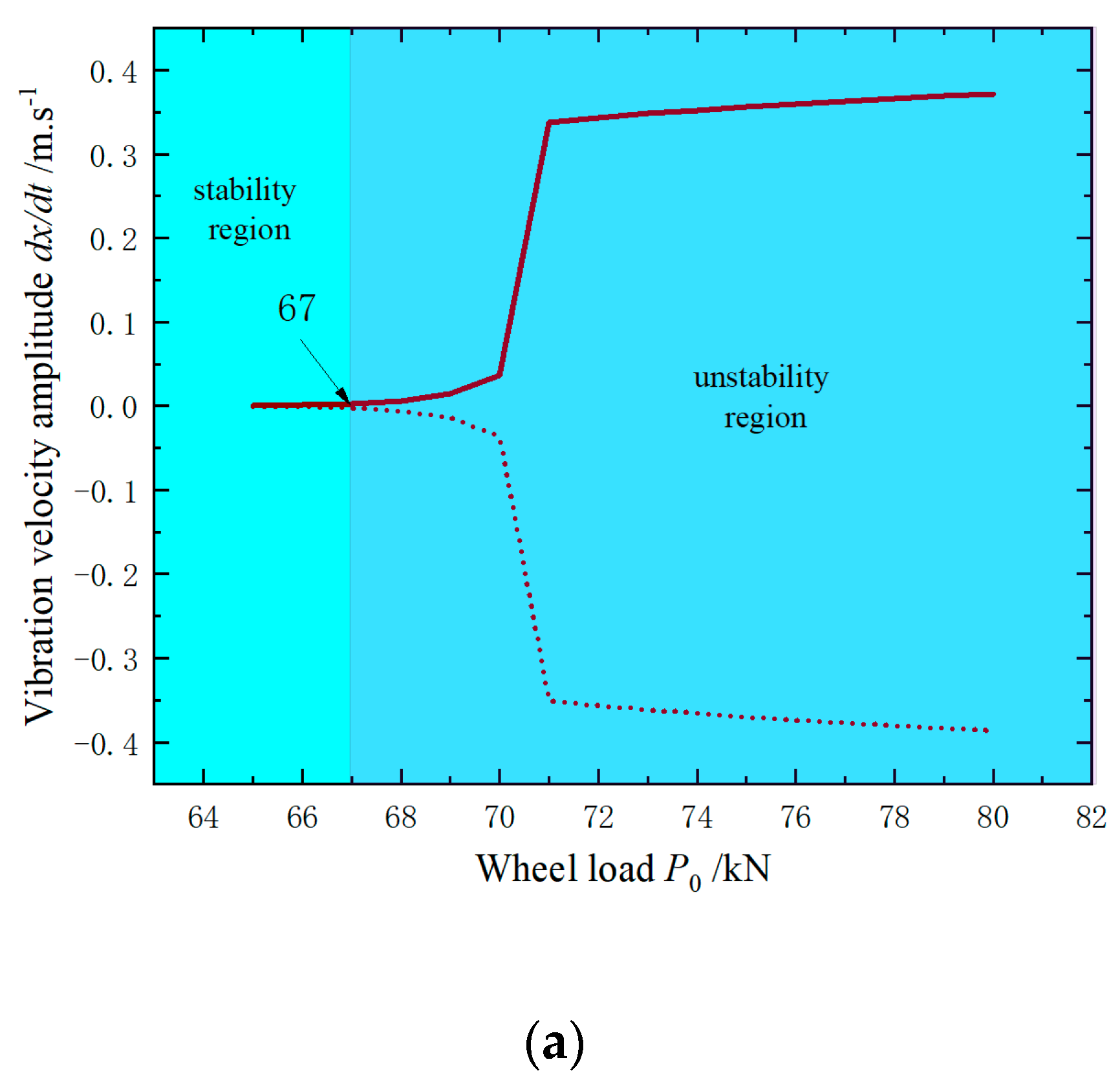
4.3.2. Wheel Load
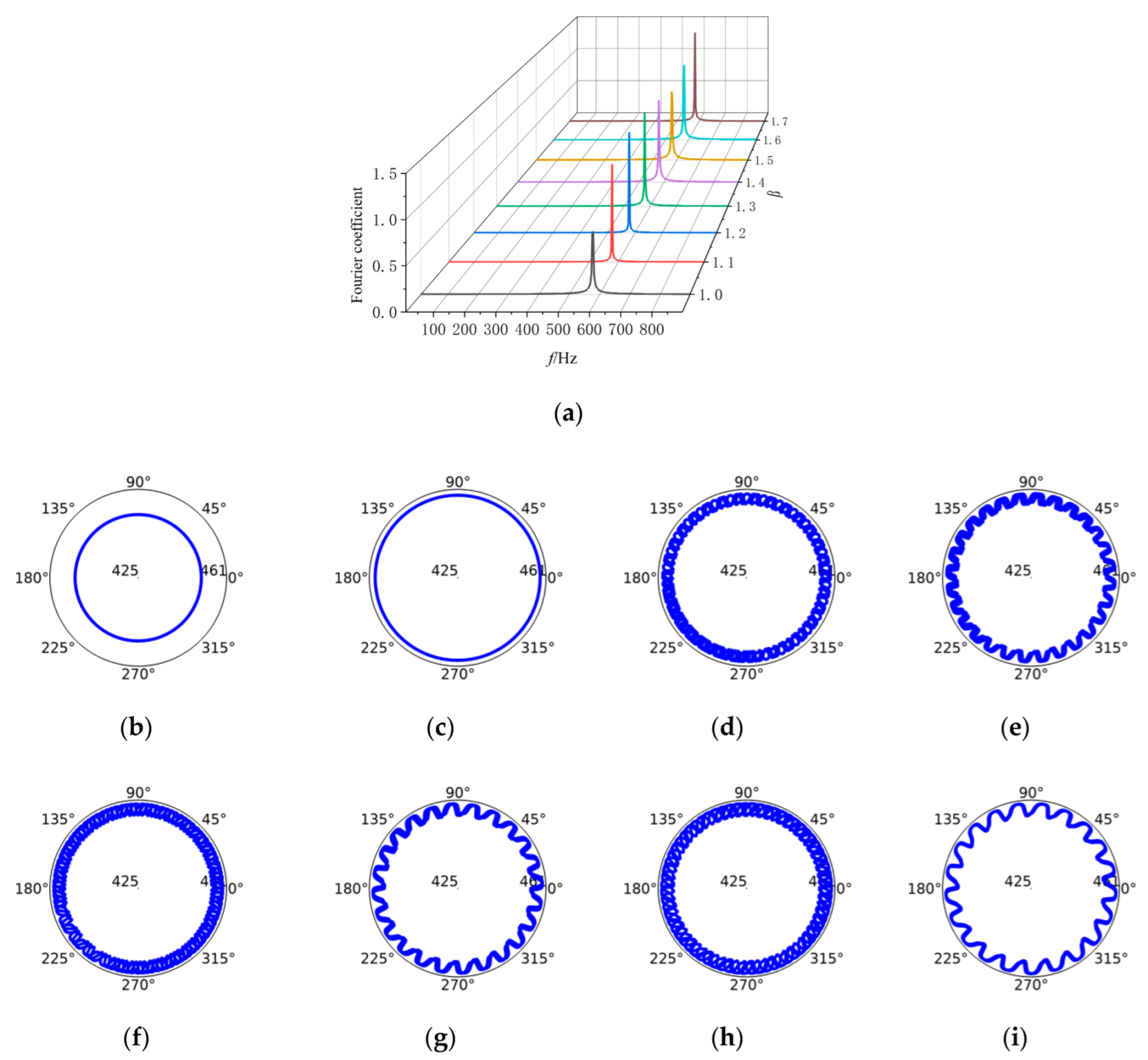
4.3.3. Wheel Rail Vertical Dynamic Force
4.3.4. Damping Ratio
5. Evolution Verification of Wheel Polygonal Wear
5.1. Numerical Simulation Verification
5.2. Actual Vehicle Tracking Verification
6. Conclusions
- The dynamic model of the wheel lateral self-excited vibration is constructed, and the lateral self-excited vibration stability of the system is investigated. The Hopf bifurcation points are found for vehicle speed, dampening, and wheel load.
- It is discovered that the polygonal wear of the wheel exhibits “constant speed–self excitation–fixed frequency–divide” features. The existing vehicle tracking data had been confirmed.
- The order of the wheel is the ratio of the wheel lateral self-excited vibration frequency to its rotational frequency.
- The wheel–rail vertical dynamic force excites the same frequency low-order wheel polygon, but has little impact on the high-order wheel polygon, and its effect on wheel polygonal wear requires additional investigation.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Barke, D.W.; Chiu, W.K. A review of the effects of out-of-round wheels on track and vehicle components. Proc. Inst. Mech. Eng. Part F Rail. Rapid. Transit 2005, 219, 151–175. [Google Scholar] [CrossRef]
- Jin, X.S.; Wu, Y.; Liang, S.L.; Wen, Z.F. Mechanisms and countermeasures of out-of-roundness wear on railway vehicle Wheels. J. Southwest Jiaotong Univ. 2018, 53, 1–14. (In Chinese) [Google Scholar]
- Wang, P.; Tao, G.Q.; Yang, X.X.; Wen, Z.F. Analysis of Polygonal Wear Characteristics of Chinese High-Speed Train Wheels. J. Southwest Jiaotong Univ. 2021, 1–9. Available online: http://kns.cnki.net/kcms/detail/51.1277.U.20211124.1532.002.html (accessed on 21 July 2022). (In Chinese).
- Tao, G.Q.; Wang, L.F.; Wen, Z.F.; Guan, Q.H.; Jin, X.S. Measurement and assessment of out-of-round electric locomotive wheels. Proc. Inst. Mech. Eng. Part F Rail. Rapid. Transit 2018, 232, 275–287. [Google Scholar] [CrossRef]
- Wu, Y.; Du, X.; Zhang, H.J.; Wen, Z.F.; Jin, X.S. Experimental analysis of the mechanism of high-order polygonal wear of wheels of a high-speed train. J. Zhejiang Univ. Sci. A Appl. Phys. Eng. 2017, 18, 579–592. [Google Scholar] [CrossRef]
- Nielsen, J.C.O.; Johansson, A. Out-of-round railway wheels—A literature survey. Proc. Inst. Mech. Eng. Part F Rail. Rapid. Transit 2000, 214, 79–91. [Google Scholar] [CrossRef]
- Johansson, A.; Andersson, C. Out-of-round railway wheels—A study of wheel polygonalization through simulation of three-dimensional wheel-rail interaction and wear. Veh. Syst. Dyn. 2005, 43, 539–559. [Google Scholar] [CrossRef]
- MORYS. Enlargement of out-of-round wheel profiles on high speed trains. J. Sound Vib. 1999, 227, 65–978. [Google Scholar]
- Chen, G.X.; Jin, X.S.; Wu, P.B.; Dai, H.Y.; Zhou, Z.R. Finite element study on the generation mechanism of polygonal wear of railway wheels. J. China Railw. Soc. 2011, 33, 14–18. (In Chinese) [Google Scholar]
- Zhao, X.N.; Chen, G.X.; Lv, J.Z.; Zhang, S.; Wu, B.W.; Zhu, Q. Studyon the mechanism for the wheel polygonal wear of high-speed trains in terms of the frictional self-excited vibration theory. Wear 2019, 426–427, 1820–1827. [Google Scholar] [CrossRef]
- Cui, X.L.; Li, T.; Bao, P.; Wen, X.; Yang, Z. Research on the Dynamic Cause of Rail Corrugation in the Braking Section of High-Speed Railways Under Multiple Vibration Inducements. J. Vib. Eng Technol. 2022. [Google Scholar] [CrossRef]
- Wu, B.W.; Qiao, Q.F.; Chen, G.X.; Lv, J.Z.; Zhu, Q.; Zhao, X.N.; Ouyang, H. Effect of the unstable vibration of the disc brake system of high-speed trains on wheel polygonalization. Proc. Inst. Mech. Eng. Part F Rail. Rapid. Transit 2020, 234, 80–95. [Google Scholar] [CrossRef]
- Peng, B.; Iwnicki, S.; Shackleton, P.; Crosbee, D. Comparison of wear models for simulation of railway wheel polygonization. Wear 2019, 436–437, 203010. [Google Scholar] [CrossRef]
- Fu, B.; Bruni, S.; Luo, S.H. Study on wheel polygonization of a metro vehicle based on polygonal wear simulation. Wear 2019, 438–439, 203071. [Google Scholar] [CrossRef] [Green Version]
- Pombo, J.; Ambrósio, J.; Pereira, M.; Lewis, R.; Dwyer-Joyce, R.; Ariaudo, C.; Kuka, N. Development of a wear prediction tool for steel railway wheels using three alternative wear functions. Wear 2011, 271, 238–245. [Google Scholar] [CrossRef]
- Dong, Y.H.; Cao, S.Q. Generation and evolution conditions of polygonal wear of high-speed wheel. Shock. Vib. 2021, 2021, 1–10. [Google Scholar] [CrossRef]
- Ishikawa, Y.; Kawamura, A. Maximum Adhesive Force Control in Super High-Speed Train. In Proceedings of the Power Conversion Conference, Nagaoka, Japan, 6 August 1997; pp. 951–954. [Google Scholar]
- Ye, Y.G.; Zhu, B.; Huang, P.; Peng, B. OORNet: A deep learning model for on-board condition monitoring and fault diagnosis of out-of-round wheels of high-speed trains. Measurement 2022, 199, 111268. [Google Scholar] [CrossRef]
- De Wit, C.C.; Olsson, H.; Astrom, K.-J.; Lischinsky, P. A new model for control of systems with friction. IEEE Trans. Autom. Control. 1995, 40, 419–425. [Google Scholar] [CrossRef] [Green Version]
- Wu, Y.; Jin, X.S.; Cai, W.B.; Han, J.; Xiao, X.B. Key Factors of the Initiation and Development of Polygonal Wear in the Wheels of a High-Speed Train. Appl. Sci. 2020, 10, 5880. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| D/mm | ω/(rad·s−1) | f2/Hz | N | f1/Hz |
|---|---|---|---|---|
| 915 | 182.1 | 29.0 | 20 | 580.1 |
| 875 | 190.5 | 30.3 | 19 | 576.3 |
| 830 | 200.8 | 32.0 | 18 | 575.6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, Y.; Cao, S. Polygonal Wear Mechanism of High-Speed Train Wheels Based on Lateral Friction Self-Excited Vibration. Machines 2022, 10, 608. https://doi.org/10.3390/machines10080608
Dong Y, Cao S. Polygonal Wear Mechanism of High-Speed Train Wheels Based on Lateral Friction Self-Excited Vibration. Machines. 2022; 10(8):608. https://doi.org/10.3390/machines10080608
Chicago/Turabian StyleDong, Yahong, and Shuqian Cao. 2022. "Polygonal Wear Mechanism of High-Speed Train Wheels Based on Lateral Friction Self-Excited Vibration" Machines 10, no. 8: 608. https://doi.org/10.3390/machines10080608
APA StyleDong, Y., & Cao, S. (2022). Polygonal Wear Mechanism of High-Speed Train Wheels Based on Lateral Friction Self-Excited Vibration. Machines, 10(8), 608. https://doi.org/10.3390/machines10080608