
Two-Dimensional-Based Hybrid Shape Optimisation of a 5-Element Formula 1 Race Car Front Wing under FIA Regulations
 and
and
Abstract
:1. Introduction
2. Methodology
2.1. Parametric Optimisation
2.2. Adjoint-Based Optimisation
3. Mathematical Considerations
3.1. Gaussian Process Surrogate Sampling with Genetic Algorithms
3.2. Adjoint Approach to Optimisation
3.3. Radial Basis Functions
3.4. Governing Equations Turbulence Modelling
4. CFD Simulation
4.1. Set-Up of the CFD Simulations
4.2. Validation of Simulations
Convergence Analysis of the Full Front Wing Mesh
5. Results from Parametric Optimisation
5.1. Exploratory Analysis
5.2. Optimal Parametric Design
6. Results from Hybrid Optimisation: Final Design
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Formula 1 Technical Regulations 2021: Front Wings

References
- Spalart, P.R.; Venkatakrishnan, V. On the role and challenges of CFD in the aerospace industry. Aeronaut. J. 2016, 120, 209. [Google Scholar] [CrossRef]
- Raheem, M.A.; Edi, P.; Pasha, A.A.; Rahman, M.M.; Juhany, K.A. Numerical study of variable camber continuous trailing edge flap at off-design conditions. Energies 2019, 12, 3185. [Google Scholar] [CrossRef]
- Biancolini, M.E.; Biancolini, C.; Costa, E.; Gattamelata, D.; Valentini, P.P. Industrial application of the meshless morpher RBF morph to a motorbike windshield optimisation. In Proceedings of the European Automotive Simulation Conference (EASC), Munich, Germany, 6–7 July 2009; pp. 6–7. [Google Scholar]
- Toet, W. Aerodynamics and aerodynamic research in Formula 1. Aeronaut. J. 2013, 117, 1–26. [Google Scholar] [CrossRef]
- Castro, X.; Rana, Z.A. Aerodynamic and structural design of a 2022 Formula One front wing assembly. Fluids 2020, 5, 237. [Google Scholar] [CrossRef]
- Patil, A.; Kshirsagar, S.; Parge, T. Study of front wing of formula one car using computational fluid dynamics. Int. J. Mech. Eng. Robot. Res. 2014, 3, 282. [Google Scholar]
- Mokhtar, W.; Durrer, S. A CFD analysis of a race car front wing in ground effect. In Proceedings of the ASEE North Central Section Conference, Mt Pleasant, MI, USA, 18–19 March 2016; pp. 18–19. [Google Scholar]
- Biancolini, M. Fluid structure interaction with RBF morph a generic Formula 1 front end. In Proceedings of the CAE Conference, Verona, Italy, 20–21 October 2011. [Google Scholar]
- Petrone, G.; Hill, C.; Biancolini, M.E. Track by track robust optimization of a F1 front wing using adjoint solutions and radial basis functions. In Proceedings of the 32nd AIAA Applied Aerodynamics Conference, Atlanta, GA, USA, 16–20 June 2014; p. 3174. [Google Scholar]
- Wade, A.; Keating, M.; Petrone, G. Shape optimisation for aerodynamic performance using adjoint methods. In Proceedings of the The International Vehicle Aerodynamics Conference, Prestwold, UK, 14–15 October 2014; Woodhead Publishing: Cambridge, UK, 2014; pp. 139–147. [Google Scholar]
- Ahlfeld, R.; Ciampoli, F.; Pietropaoli, M.; Pepper, N.; Montomoli, F. Data-driven uncertainty quantification for Formula 1: Diffuser, wing tip and front wing variations. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2019, 233, 1495–1506. [Google Scholar] [CrossRef]
- Kalinowski, M.; Szczepanik, M. Aerodynamic shape optimization of racing car front wing. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1037, 012058. [Google Scholar] [CrossRef]
- Melvin, A.; Martinelli, L. Aerodynamic shape optimization of multi-element airfoils in ground effect. In Proceedings of the 46th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 7–10 January 2008; p. 327. [Google Scholar]
- Basso, M.; Cravero, C.; Marsano, D. Aerodynamic effect of the gurney flap on the front wing of a F1 car and flow interactions with car components. Energies 2021, 14, 2059. [Google Scholar] [CrossRef]
- Martins, D.; Correia, J.; Silva, A. The influence of front wing pressure distribution on wheel wake aerodynamics of a F1 car. Energies 2021, 14, 4421. [Google Scholar] [CrossRef]
- Guerrero, A.; Castilla, R. Aerodynamic study of the wake effects on a Formula 1 car. Energies 2020, 13, 5183. [Google Scholar] [CrossRef]
- Ravelli, U.; Savini, M. Aerodynamic simulation of a 2017 F1 car with open-source CFD code. J. Traffic Transp. Eng. 2018, 6, 155–163. [Google Scholar]
- Granados-Ortiz, F.-J.; Ortega-Casanova, J. Machine learning-aided design optimization of a mechanical micromixer. Phys. Fluids 2021, 33, 063604. [Google Scholar]
- Montomoli, F.; Carnevale, M.; D’Ammaro, A.; Massini, M.; Salvadori, S. Uncertainty Quantification in Computational Fluid Dynamics and Aircraft Engines; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Skinner, S.N.; Zare-Behtash, H. State-of-the-art in aerodynamic shape optimisation methods. Appl. Soft Comput. 2018, 62, 933–962. [Google Scholar]
- Mirjalili, S. Particle swarm optimisation. In Evolutionary Algorithms and Neural Networks; Springer: Berlin/Heidelberg, Germany, 2019; pp. 15–31. [Google Scholar]
- Srinivas, N.; Deb, K. Multiobjective optimization using nondominated sorting in genetic algorithms. Evol. Comput. 1994, 2, 221–248. [Google Scholar] [CrossRef]
- Granados-Ortiz, F.-J.; Arroyo, C.; Pérez Arroyo, C.; Puigt, G.; Lai, C.-H.; Airiau, C. On the influence of uncertainty in computational simulations of a high-speed jet flow from an aircraft exhaust. Comput. Fluids 2019, 180, 139–158. [Google Scholar] [CrossRef]
- Fang, J.; Gao, Y.; Sun, G.; Zheng, G.; Li, Q. Dynamic crashing behavior of new extrudable multi-cell tubes with a functionally graded thickness. Int. J. Mech. Sci. 2015, 103, 63–73. [Google Scholar] [CrossRef]
- Ortega-Casanova, J. Application of cfd on the optimization by response surface methodology of a micromixing unit and its use as a chemical microreactor. Chem. Eng. Process. Process Intensif. 2017, 117, 18–26. [Google Scholar] [CrossRef]
- Klein, R.J.; Biserni, C.; Zinani, F.S.F.; Rocha, L.A.O. Constructal Design of tube arrangements for heat transfer to non-Newtonian fluids. Int. J. Mech. Sci. 2017, 133, 590–597. [Google Scholar] [CrossRef]
- Duchaine, F.; Morel, T.; Gicquel, L.Y.M. Computational-fluid-dynamics-based Kriging optimization tool for aeronautical combustion chambers. AIAA J. 2009, 47, 631–645. [Google Scholar]
- Zhang, Y.; Hu, S.; Wu, J.; Zhang, Y.; Chen, L. Multi-objective optimization of double suction centrifugal pump using Kriging metamodels. Adv. Eng. Softw. 2014, 74, 16–26. [Google Scholar] [CrossRef]
- Regis, R.G.; Shoemaker, C.A. Constrained global optimization of expensive black box functions using radial basis functions. J. Glob. Optim. 2005, 31, 153–171. [Google Scholar] [CrossRef]
- Bagheri, S.; Konen, W.; Bäck, T. Comparing kriging and radial basis function surrogates. In Proceedings of the 27th Workshop Computational Intelligence, Dortmund, Germany, 22–24 December 2017; pp. 243–259. [Google Scholar]
- Jakobsson, S.; Patriksson, M.; Rudholm, J.; Wojciechowski, A. A method for simulation based optimization using radial basis functions. Optim. Eng. 2010, 11, 501–532. [Google Scholar] [CrossRef]
- Biancolini, M.E. Fast Radial Basis Functions for Engineering Applications; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Serani, A.; Pellegrini, R.; Wackers, J.; Jeanson, C.-J.; Queutey, P.; Visonneau, M.; Diez, M. Adaptive multi-fidelity sampling for CFD-based optimisation via radial basis function metamodels. Int. J. Comput. Fluid Dyn. 2019, 33, 237–255. [Google Scholar] [CrossRef]
- Rößger, P.; Richter, A. Performance of different optimization concepts for reactive flow systems based on combined CFD and response surface methods. Comput. Chem. Eng. 2018, 108, 232–239. [Google Scholar] [CrossRef]
- Qi, C.; Sun, Y.; Hu, H.; Wang, D.; Cao, G.; Yang, S. On design of hybrid material double-hat thin-walled beams under lateral impact. Int. J. Mech. Sci. 2016, 118, 21–35. [Google Scholar] [CrossRef]
- Rao, S.S. Engineering Optimization: Theory and Practice; John Wiley & Sons: Hoboken, NJ, USA, 2019. [Google Scholar]
- Glover, F. Future paths for integer programming and links to artificial intelligence. Comput. Oper. Res. 1986, 13, 533–549. [Google Scholar] [CrossRef]
- Abdel-Basset, M.; Abdel-Fatah, L.; Sangaiah, A.K. Metaheuristic algorithms: A comprehensive review. In Computational Intelligence for Multimedia Big Data on the Cloud with Engineering Applications; Elsevier: Amsterdam, The Netherlands, 2018; pp. 185–231. [Google Scholar]
- Wang, G.; Deb, S.; Coelho, L.D.S. Earthworm optimisation algorithm: A bio-inspired metaheuristic algorithm for global optimisation problems. Int. J. Bio-Inspired Comput. 2018, 12, 1–22. [Google Scholar] [CrossRef]
- Sun, J.; Lai, C.; Wu, X. Particle Swarm Optimisation: Classical and Quantum Perspectives; CRC Press: Boca Raton, FL, USA, 2016. [Google Scholar]
- Dey, N. Advancements in Applied Metaheuristic Computing; IGI Global: Hershey, PA, USA, 2017. [Google Scholar]
- Alsattar, H.A.; Zaidan, A.A.; Zaidan, B.B. Novel meta-heuristic bald eagle search optimisation algorithm. Artif. Intell. Rev. 2020, 53, 2237–2264. [Google Scholar] [CrossRef]
- Ortega-Casanova, J.; Castillo-Sanchez, S.I. On using axisymmetric turbulent impinging jets swirling as burger’s vortex for heat transfer applications. single and multi-objective vortex parameters optimization. Appl. Therm. Eng. 2017, 121, 103–114. [Google Scholar] [CrossRef]
- Ortega-Casanova, J.; Lai, C. Cfd study on laminar mixing at a very low reynolds number by pitching and heaving a square cylinder. Comput. Fluids 2018, 168, 318–327. [Google Scholar] [CrossRef]
- Ortega-Casanova, J.; Granados-Ortiz, F. Using machine-learning to speed-up optimisation in cfd: Designing a micromixer. In Proceedings of the APS Division of Fluid Dynamics Meeting Abstracts, Online, 22–24 November 2020; p. F13-005. [Google Scholar]
- Vasudev, K.L.; Sharma, R.; Bhattacharyya, S.K. A multi-objective optimization design framework integrated with CFD for the design of auvs. Methods Oceanogr. 2014, 10, 138–165. [Google Scholar] [CrossRef]
- Damavandi, M.D.; Forouzanmehr, M.; Safikhani, H. Modeling and Pareto based multi-objective optimization of wavy fin-and-elliptical tube heat exchangers using CFD and NSGA-II algorithm. Appl. Therm. Eng. 2017, 111, 325–339. [Google Scholar] [CrossRef]
- Wang, X.D.; Hirsch, C.; Kang, S.; Lacor, C. Multi-objective optimization of turbomachinery using improved NSGA-II and approximation model. Comput. Methods Appl. Mech. Eng. 2011, 200, 883–895. [Google Scholar] [CrossRef]
- Biancolini, M.E.; Viola, I.M.; Riotte, M. Sails trim optimisation using CFD and RBF mesh morphing. Comput. Fluids 2014, 93, 46–60. [Google Scholar] [CrossRef]
- Biancolini, M.E.; Costa, E.; Cella, U.; Groth, C.; Veble, G.; Andrejašič, M. Glider fuselage-wing junction optimization using CFD and RBF mesh morphing. Aircr. Eng. Aerosp. Technol. 2016, 88, 740–750. [Google Scholar] [CrossRef]
- Porziani, S.; Groth, C.; Waldman, W.; Biancolini, M.E. Automatic shape optimisation of structural parts driven by BGM and RBF mesh morphing. Int. J. Mech. Sci. 2021, 189, 105976. [Google Scholar] [CrossRef]
- Sovani, S.; Khondge, A. Scaling New Heights in Aerodynamics Optimization: The 50:50:50 Method; SAE Technical Paper (No. 2012-01-0174); SAE: Pittsburgh, PA, USA, 2012. [Google Scholar]
- Biancolini, M.E.; Capellini, K.; Costa, E.; Groth, C.; Celi, S. Fast interactive CFD evaluation of hemodynamics assisted by RBF mesh morphing and reduced order models: The case of aTAA modelling. Int. J. Interact. Des. Manuf. IJIDM 2020, 14, 1227–1238. [Google Scholar] [CrossRef]
- Dawes, W.N.; Meah, N.; Kudryavtsev, A.; Evans, R.; Hunt, M.; Tiller, P. Digital geometry to support a gas turbine digital twin. In AIAA Scitech 2019 Forum; AIAA: Reston, VA, USA, 2019; p. 1715. [Google Scholar]
- Kenway, G.; Mader, C.; He, P.; Martins, J. Effective adjoint approaches for computational fluid dynamics. Prog. Aerosp. Sci. 2019, 110, 100542. [Google Scholar] [CrossRef]
- Arora, J.S. Optimum design problem formulation. In Introduction to Optimum Design, 2nd ed.; Aurora, J.S., Ed.; Academic Press: San Diego, CA, USA, 2004; pp. 15–54. [Google Scholar]
- Fleischli, B.; Mangani, L.; Rio, A.; Casartelli, E. A discrete adjoint method for pressure-based algorithms. Comput. Fluids 2021, 227, 105037. [Google Scholar] [CrossRef]
- Biancolini, M.E. Mesh morphing and smoothing by means of radial basis functions (RBF): A practical example using fluent and RBF Morph. In Handbook of Research on Computational Science and Engineering: Theory and Practice; IGI Global: Hershey, PA, USA, 2012; pp. 347–380. [Google Scholar]
- ANSYS Release 15.0. ANSYS Fluent Adjoint Solver Manual. Original Typescript. 2013. Available online: https://www.scirp.org/(S(lz5mqp453ed%20snp55rrgjct55))/reference/referencespapers.aspx?referenceid=2869465 (accessed on 22 December 2022).
- Myers, R.H.; Montgomery, D.C. Response Surface Methodology: Process and Product in Optimization Using Designed Experiments; Taylor & Francis: Abingdon, UK, 1995. [Google Scholar]
- Deng, Y.; Lin, G.; Yang, X. Multifidelity data fusion via gradient-enhanced gaussian process regression. arXiv 2020, arXiv:2008.01066. [Google Scholar] [CrossRef]
- Baar, J.H.D.; Scholcz, T.P.; Verhoosel, C.V.; Dwight, R.P.; van Zuijlen, A.H.; Bijl, H. Efficient Uncertainty Quantification with Gradient-Enhanced Kriging: Applications in Fsi; ECCOMAS: Vienna, Austria, 2012. [Google Scholar]
- Jouhaud, J.; Sagaut, P.; Labeyrie, B. A kriging approach for CFD/wind-tunnel data comparison. J. Fluid Eng. 2006, 128, 847–855. [Google Scholar] [CrossRef]
- Williams, C.K.I.; Rasmussen, C.E. Gaussian Processes for Machine Learning; MIT Press: Cambridge, MA, USA, 2006; Volume 2. [Google Scholar]
- Lophaven, S.N.; Nielsen, H.B.; Sondergaard, J.; Dace, A. DACE: A Matlab Kriging Toolbox; Technical Report No. IMMTR-2002; Technical University of Denmark: Lyngby, Denmark, 2002; Volume 12. [Google Scholar]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Srinivas, N.; Deb, K. Multiobjective optimization using NSGA. Evol. Comput. 1995, 2. [Google Scholar]
- Tzanakis, A. Duct Optimization Using CFD Software ‘ANSYS Fluent Adjoint Solver’. 2014. Available online: https://hdl.handle.net/20.500.12380/202020 (accessed on 25 May 2021).
- Czerwiński, G.; Wołoszyn, J. Optimization of air cooling system using adjoint solver technique. Energies 2021, 14, 3753. [Google Scholar] [CrossRef]
- Sidik, N.A.C.; Yusof, S.N.A.; Asako, Y.; Mohamed, S.; Aziz, A. A short review on rans turbulence models. CFD Lett. 2020, 12, 83–96. [Google Scholar] [CrossRef]
- Menter, F. Zonal Two Equation k-w Turbulence Models for Aerodynamic Flows. In Proceedings of the 23rd Fluid Dynamics, Plasmadynamics, and Lasers Conference, Orlando, FL, USA, 6–9 July 1993. [Google Scholar]
- ANSYS Inc. Release 17.2. ANSYS Fluent User’s Guide; ANSYS: Canonsburg, PA, USA, 2016. [Google Scholar]
- JD Chaim Zerihan. An Investigation into the Aerodynamics of Wings in Ground Effect. Ph.D. Thesis, University of Southampton, Southampton, UK, 2001.
- Federation Internationale de l’Automobile (FIA). 2021 Formula 1 Sporting Regulations. Available online: https://www.fia.com/sites/default/files/2021_formula_1_sporting_regulations_-_iss_5_-_2020-12-16.pdf (accessed on 25 February 2022).
- Autosport. High-Downforce Tracks vs. Power Tracks in F1—Differences Explained. Available online: https://www.autosport.com/f1/news/high-downforce-track-vs-power-track-f1/6130208/ (accessed on 24 February 2022).
- Ladson, C.L.; Brooks, C.W., Jr.; Hill, A.S.; Sproles, D.W. Computer program to obtain ordinates for NACA airfoils. J. Stat. Phys. 1996, 104. [Google Scholar]
- Saffarian, M.R.; Jamaati, F.; Mohammadi, A.; Malekabad, F.G.; Ayoubloo, K.A. Investigating the entropy generation around an airfoil in turbulent flow. Aircr. Eng. Aerosp. Technol. 2020, 92, 1001–1017. [Google Scholar] [CrossRef]
- Rezaei, F.; Roohi, E.; Pasandideh-Fard, M. Stall simulation of flow around an airfoil using LES model and comparison of RANS models at low angle of attack. In Proceedings of the 15th Conference on Fluid Dynamics, Yerevan, Armenia, 14–18 July 2013; pp. 18–20. [Google Scholar]
- Sogukpinar, H.; Bozkurt, I. Implementation of different turbulence model to find proper model to estimate aerodynamic properties of airfoils. AIP Conf. Proc. 2018, 1935, 020003. [Google Scholar]
- Hafien, C.; Bourehla, A.; Bouzaiane, M. Passive separation control on a symmetric airfoil via elastic-layer. J. Appl. Fluid Mech. 2016, 9, 2569–2580. [Google Scholar] [CrossRef]
- Federation Internationale de l’Automobile (FIA). 2021 Formula 1 Technical Regulations. Available online: https://www.fia.com/regulation/category/110 (accessed on 28 February 2021).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Description | Limits | Units | |
|---|---|---|---|---|
| Lower | Higher | |||
| P1_c | Chord | 175 | 220 | mm |
| P1_m | Maximum camber | 0 | 4 | - |
| P1_p | Maximum camber location | 0 | 4 | - |
| P1_t | Maximum thickness as a fraction of the chord | 8 | 16 | - |
| P1_Angle | Angle respect to the horizontal | 1 | 6 | º |
| P2_c | Chord | 130 | 185 | mm |
| P2_m | Maximum camber | 0 | 4 | - |
| P2_p | Maximum camber location | 0 | 4 | - |
| P2_t | Maximum thickness as a fraction of the chord | 6 | 8 | - |
| P2_Angle | Angle , respect to | 8 | 11 | º |
| P3_c | Chord | 95 | 135 | mm |
| P3_m | Maximum camber | 0 | 4 | - |
| P3_p | Maximum camber location | 0 | 4 | - |
| P3_t | Maximum thickness as a fraction of the chord | 8 | 14 | - |
| P3_Angle | Angle , respect to | 8 | 11 | º |
| Overlap | Horizontal Overlap | 6 | 14 | mm |
| Space | Vertical gap or spacing | 6 | 14 | mm |
| Mesh Resolution | Coarse Mesh (M1) | Med. Mesh (M2) | Fine Mesh (M3) |
|---|---|---|---|
| Number of nodes | 25,152 | 30,592 | 41,321 |
| Elapsed time (CPU hours) | 0.21 | 0.23 | 0.27 |
| (Exp.: 1.286 [73]) | 1.334 | 1.302 | 1.301 |
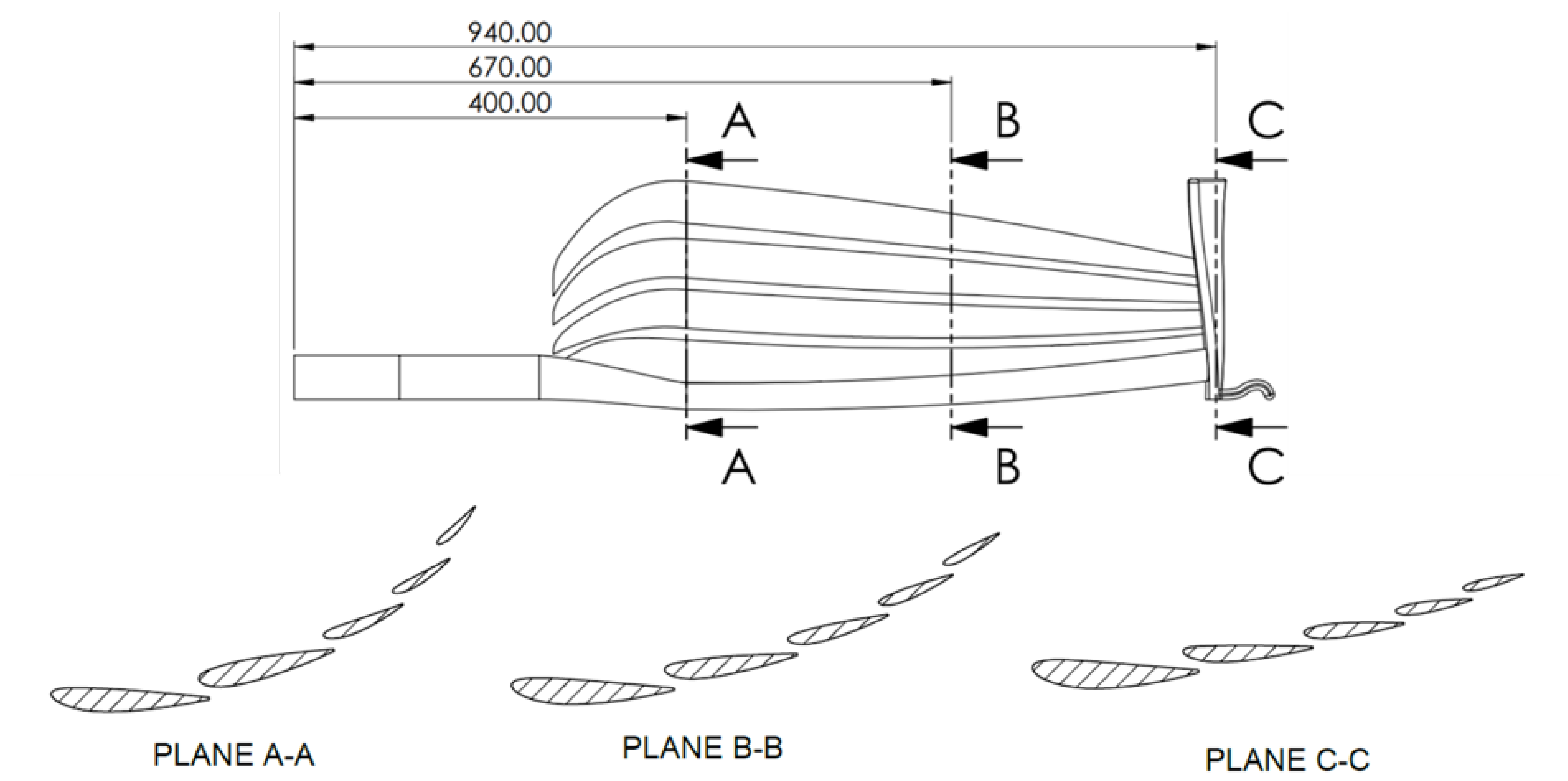
| Plane | A (400 mm) | B (670 mm) | C (940 mm) | Unit |
|---|---|---|---|---|
| Position axes x | −1145.00 | −1091.00 | −1037.00 | mm |
| Position axes y | −400.00 | −670.00 | −940.00 | mm |
| Position axes z | 65.00 | 70.00 | 95.00 | mm |
| P1 Chord | 185.30 | 196.79 | 208.28 | mm |
| P1 NACA | 3314 | 3312 | 3310 | |
| P1 Angle () | −1.66 | −2.00 | −2.35 | |
| P2 Chord | 162.33 | 164.79 | 167.25 | mm |
| P2 NACA | 2216 | 2516 | 3316 | |
| P2 Angle () | 13.70 | 8.71 | 3.71 | |
| P3 Chord | 100.25 | 120.44 | 115.57 | mm |
| P3,P4,P5 NACA | 4414 | 2213 | 0012 | |
| P3 Angle () | 9.71 | 7.25 | 2.36 | |
| P4 Chord | 77.39 | 88.30 | 79.86 | mm |
| P4 Angle () | 8.71 | 6.73 | 2.57 | |
| P5 Chord | 61.92 | 70.64 | 63.89 | mm |
| P5 Angle () | 10.45 | 8.07 | 3.08 | |
| Overlap | 12.13 | 12.30 | 12.46 | mm |
| Space | 11.92 | 9.75 | 7.57 | mm |
| Number of Adjoint Iterations | ||||
|---|---|---|---|---|
| 0 | −3.61 | 1.50 | −24.06 | |
| B-B Plane | 10 | −3.67 | 1.45 | −25.31 |
| 20 | −3.72 | 1.31 | −28.40 | |
| 0 | 3.34 | −33.51 | ||
| C-C Plane | 10 | 3.34 | −36.23 | |
| 20 | 3.34 | −37.15 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Granados-Ortiz, F.-J.; Morales-Higueras, P.; Ortega-Casanova, J.; López-Martínez, A. Two-Dimensional-Based Hybrid Shape Optimisation of a 5-Element Formula 1 Race Car Front Wing under FIA Regulations. Machines 2023, 11, 231. https://doi.org/10.3390/machines11020231
Granados-Ortiz F-J, Morales-Higueras P, Ortega-Casanova J, López-Martínez A. Two-Dimensional-Based Hybrid Shape Optimisation of a 5-Element Formula 1 Race Car Front Wing under FIA Regulations. Machines. 2023; 11(2):231. https://doi.org/10.3390/machines11020231
Chicago/Turabian StyleGranados-Ortiz, Francisco-Javier, Pablo Morales-Higueras, Joaquín Ortega-Casanova, and Alejandro López-Martínez. 2023. "Two-Dimensional-Based Hybrid Shape Optimisation of a 5-Element Formula 1 Race Car Front Wing under FIA Regulations" Machines 11, no. 2: 231. https://doi.org/10.3390/machines11020231