
Coordinated Lateral Stability Control of Autonomous Vehicles Based on State Estimation and Path Tracking
Abstract
:1. Introduction
2. The Dynamics Models
2.1. 2-DOF Vehicle Model
2.2. 7-DOF Vehicle Model
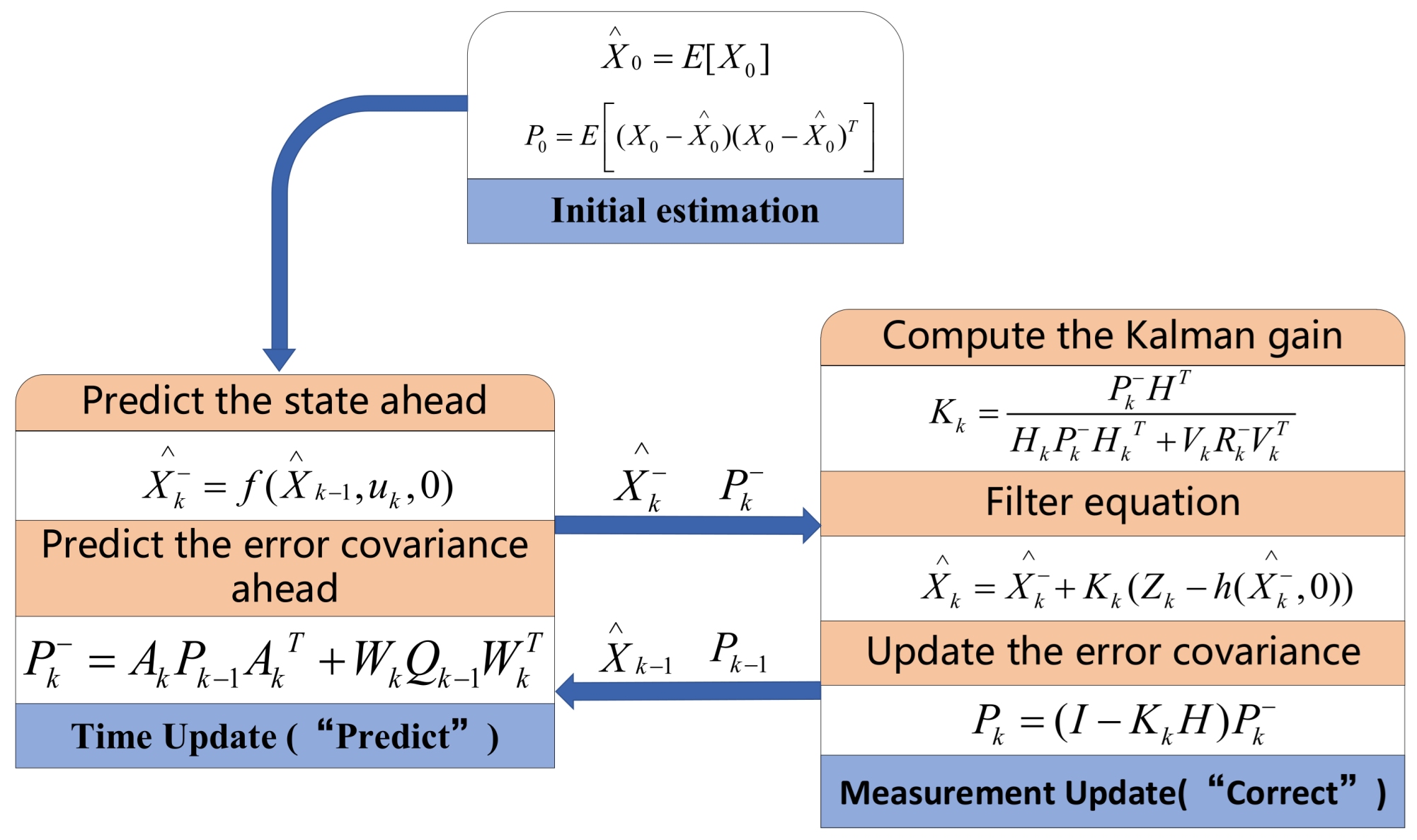
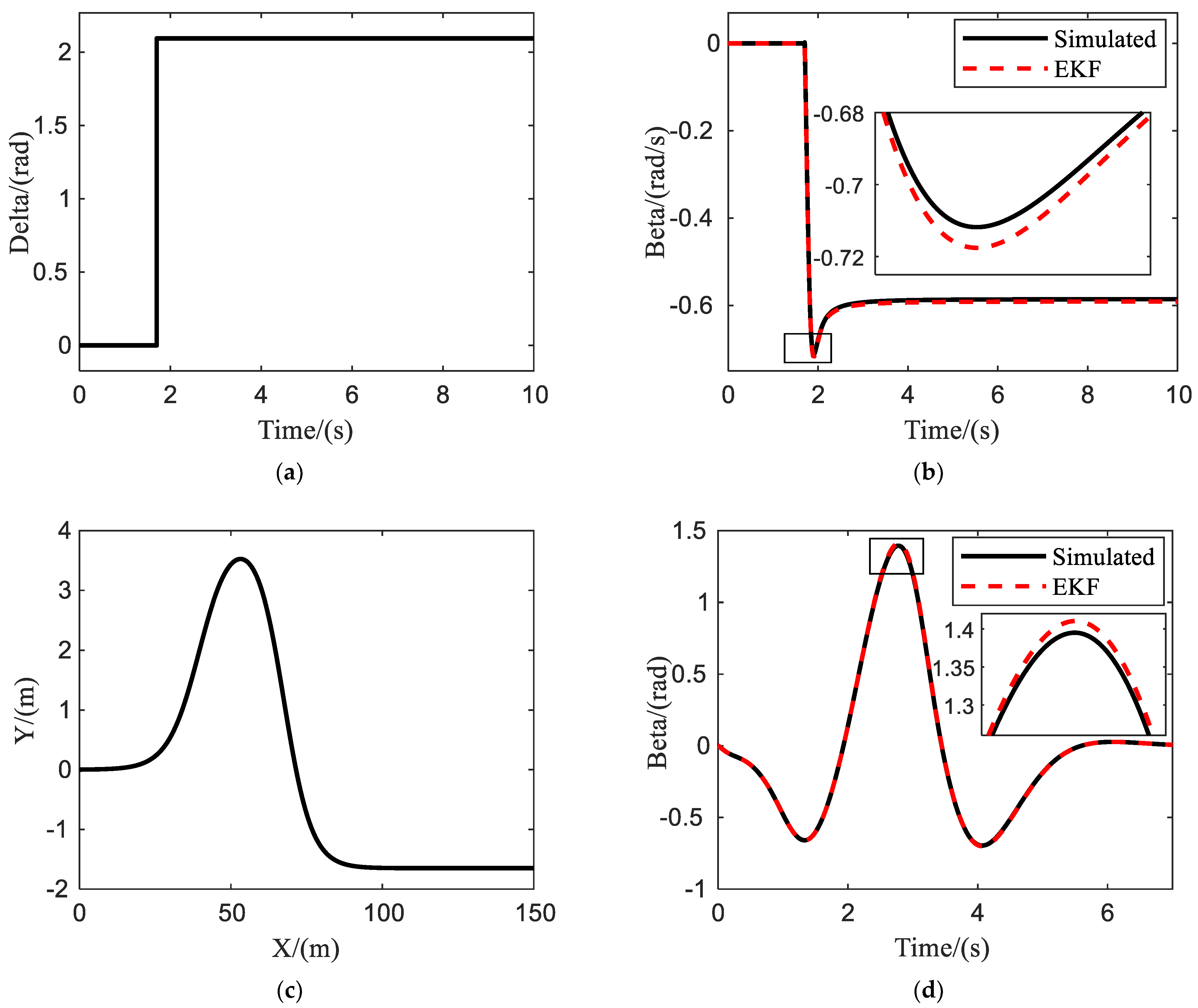
3. EKF Observer
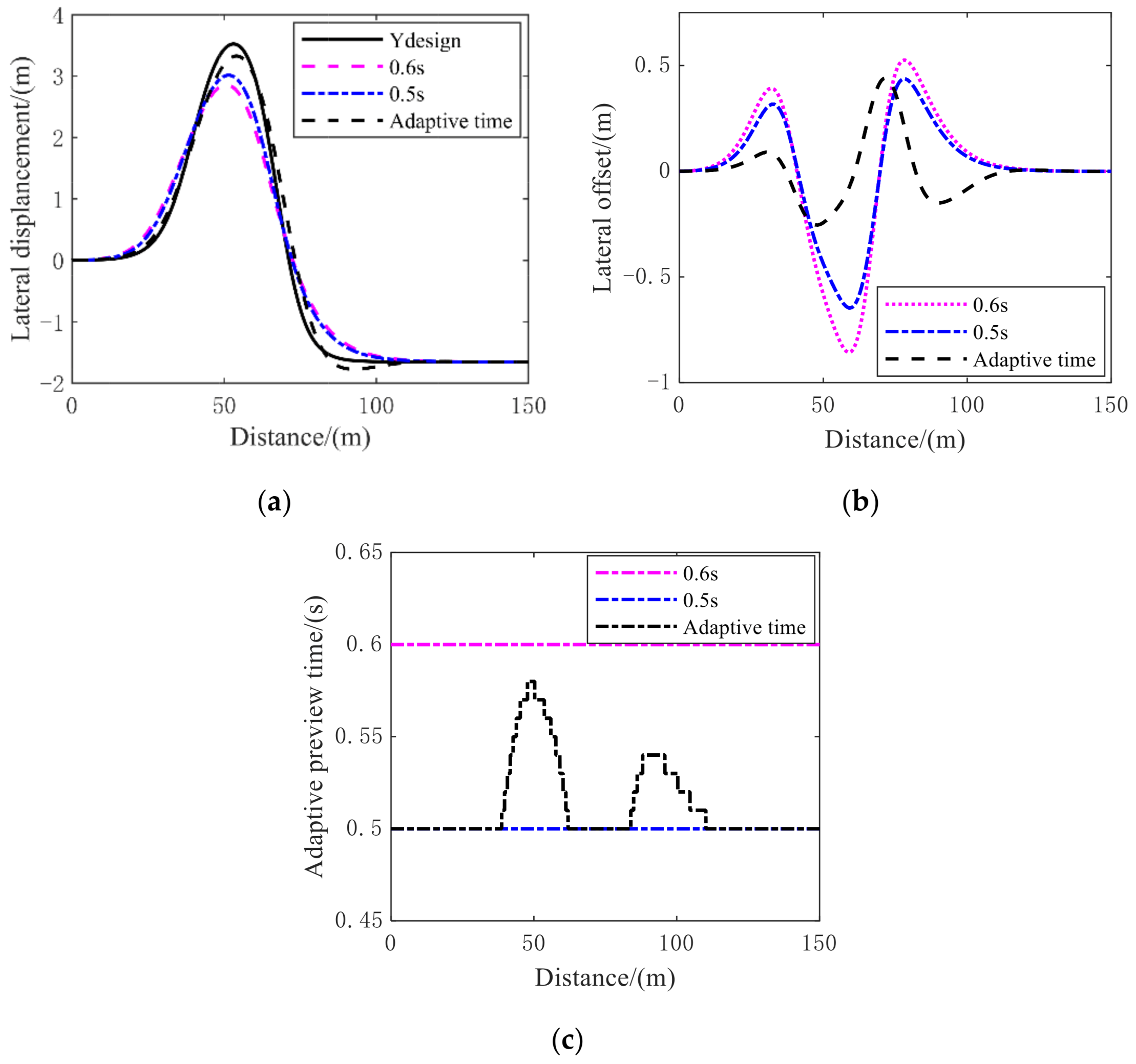
4. Adaptive Preview Time Control
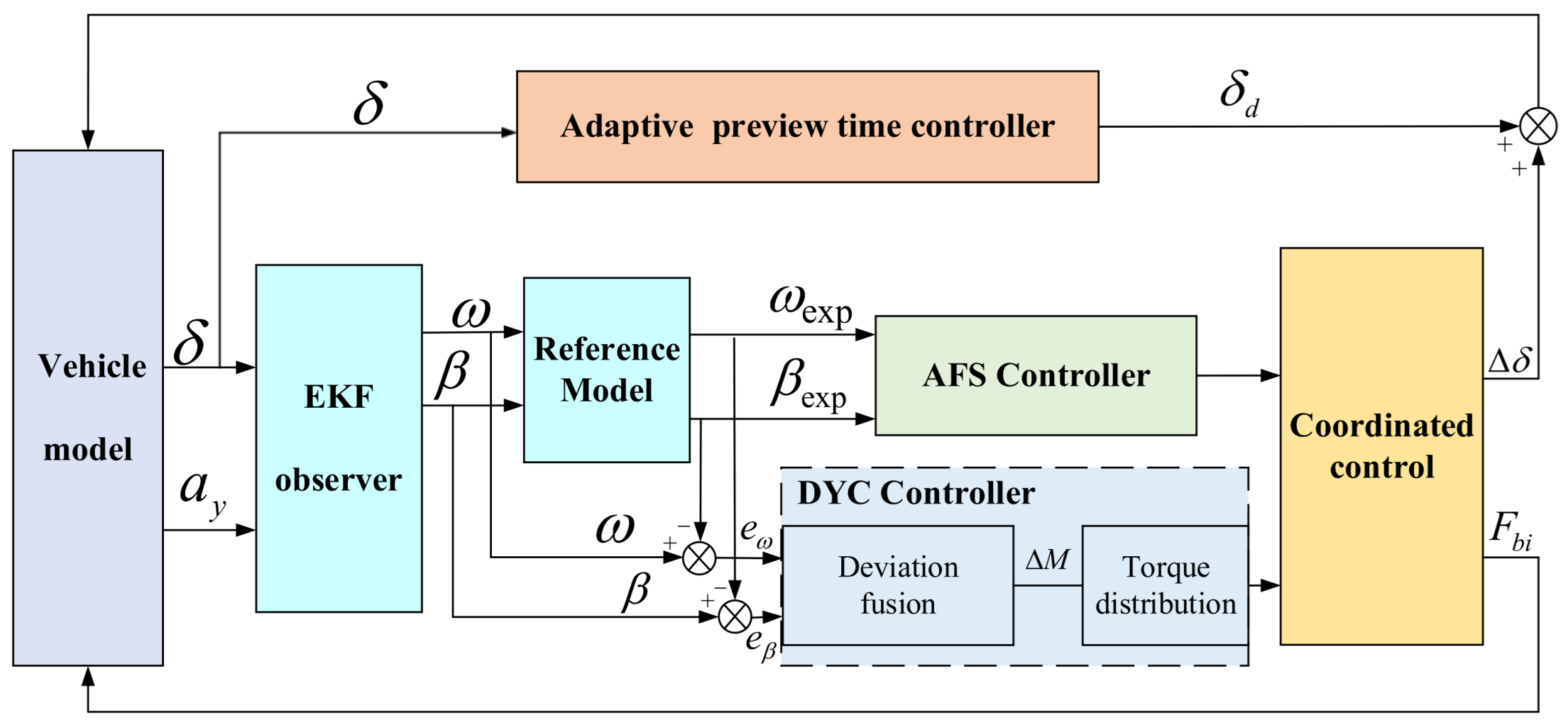
5. Coordinated Control
5.1. AFS Controller Design
5.2. DYC Controller Design
5.2.1. DYC Controller
5.2.2. Stability Analysis
5.2.3. Yaw Moment Distribution Strategy
5.3. AFS and DYC Coordinated Control
5.3.1. Critical Steering Angle
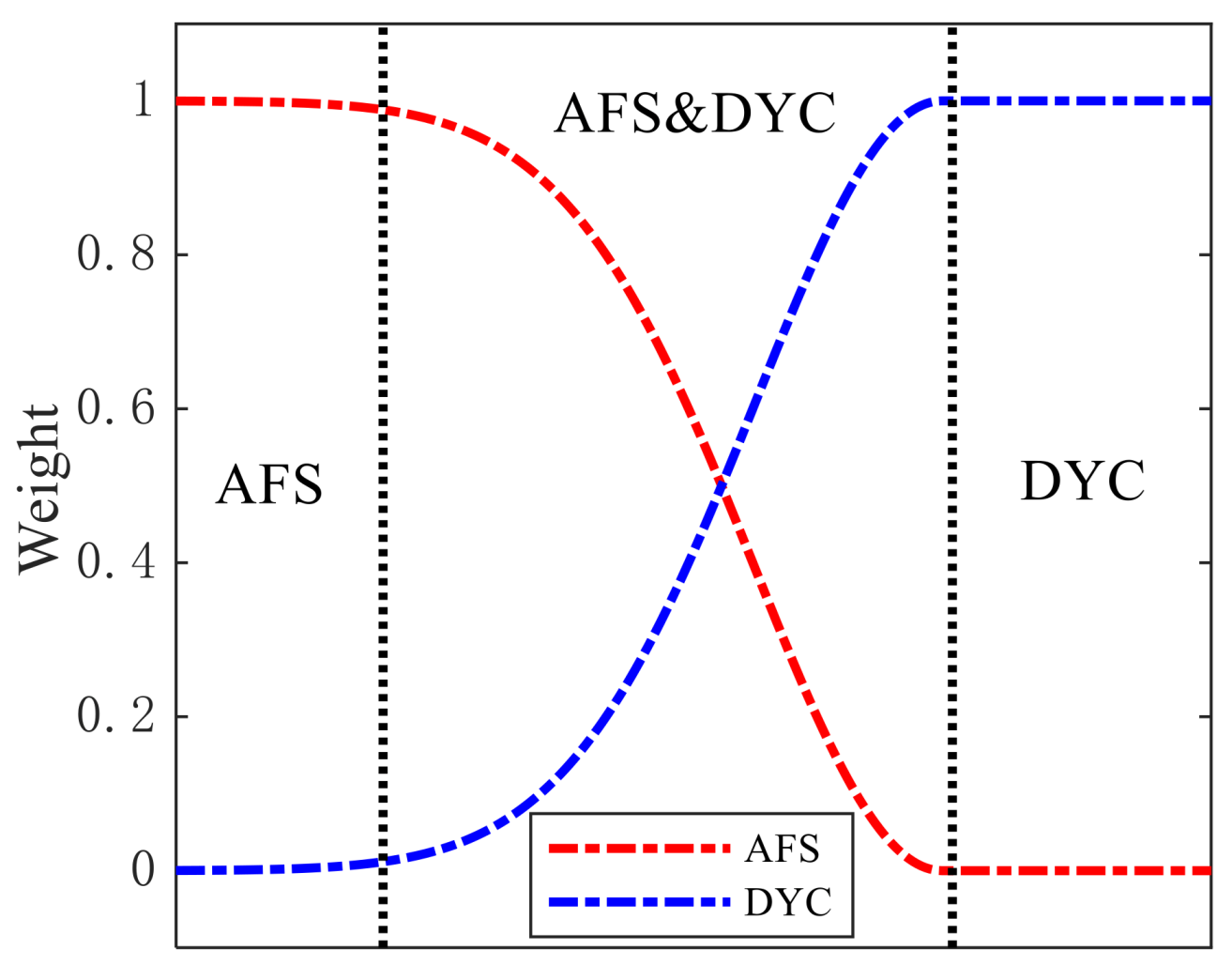
5.3.2. Switching Function
6. Simulation and Discussion
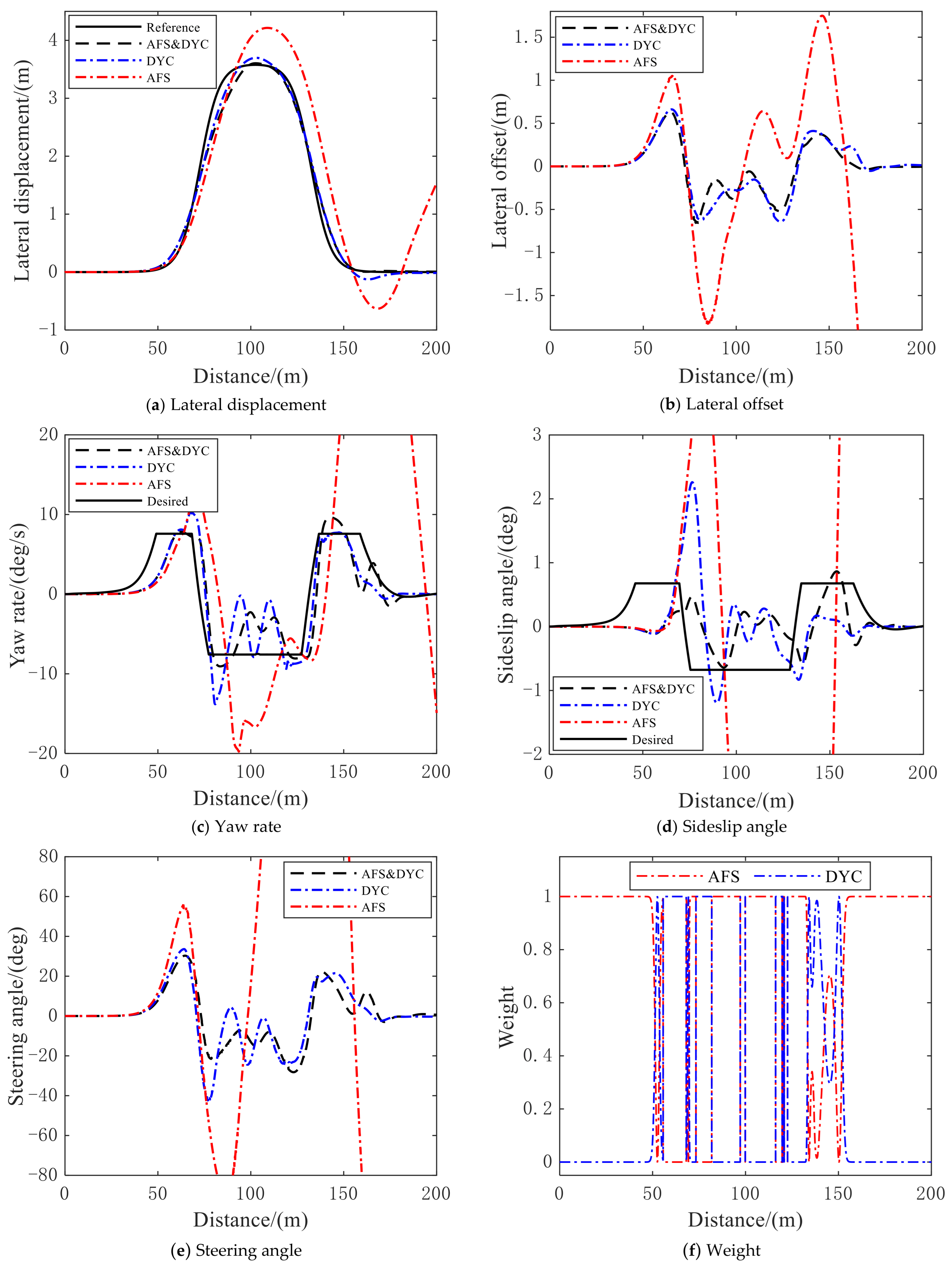
6.1. Simulation under High-Speed Driving Conditions
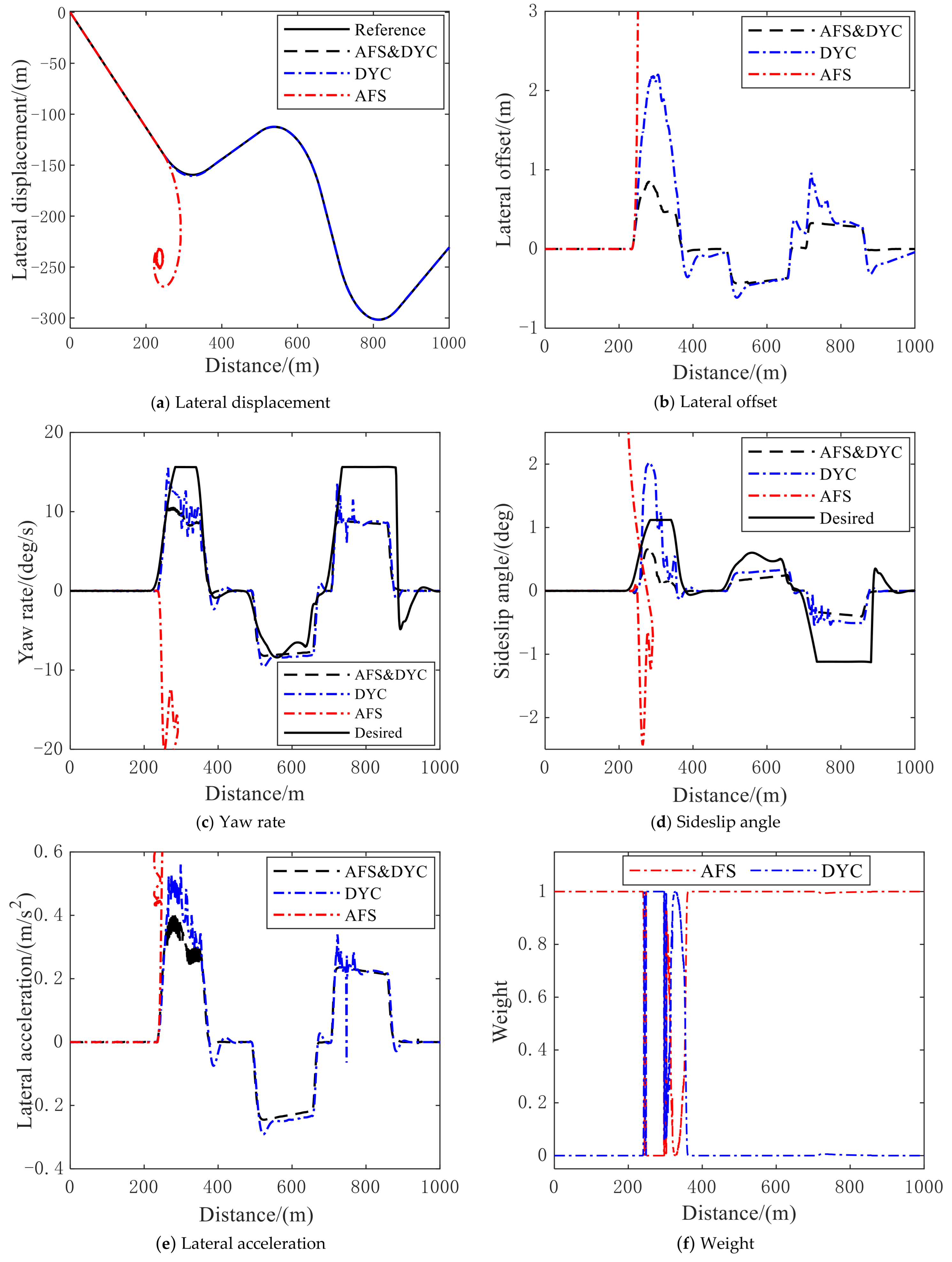
6.2. Simulation under Low Adhesion Coefficient
7. Conclusions and Prospects
- (1)
- An EKF observer is designed to estimate the sideslip angle, aiming to better investigate the lateral stability performance of autonomous vehicles.
- (2)
- Path-tracking accuracy is optimized based on the adaptive preview time controller, and the vehicle tracks the reference trajectory well and can meet the driving requirements of turning and straight driving conditions.
- (3)
- An AFS and DYC coordinated control strategy is designed by considering the cut-in moment, and the simulation results demonstrate that the controller makes good use of the road adhesion, and its tracking performance is better than that of AFS or DYC alone, which can ensure the stability of the vehicle and obtain better tracking accuracy simultaneously.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Nam, K.; Fujimoto, H.; Hori, Y. Lateral Stability Control of In-Wheel-Motor-Driven Electric Vehicles Based on Sideslip Angle Estimation Using Lateral Tire Force Sensors. IEEE Trans. Veh. Technol. 2012, 61, 1972–1985. [Google Scholar] [CrossRef]
- Zhou, B.; Xu, M.; Fan, L.; Yuan, X. Integrated control for AFS and EPS with EKF estimation of lateral force. J. Vib. Shock. 2015, 34, 93–98. [Google Scholar] [CrossRef]
- Hang, P.; Chen, X. Integrated chassis control algorithm design for path tracking based on four-wheel steering and direct yaw-moment control. Proc. Inst. Mech. Eng. Part I J. Syst. Control. Eng. 2019, 233, 625–641. [Google Scholar] [CrossRef]
- Chindamo, D.; Lenzo, B.; Gadola, M. On the Vehicle Sideslip Angle Estimation: A Literature Review of Methods, Models, and Innovations. Appl. Sci. 2018, 8, 355. [Google Scholar] [CrossRef]
- Chen, T.; Chen, L.; Xu, X.; Cai, Y.; Jiang, H.; Sun, X. Sideslip Angle Fusion Estimation Method of an Autonomous Electric Vehicle Based on Robust Cubature Kalman Filter with Redundant Measurement Information. World Electr. Veh. J. 2019, 10, 34. [Google Scholar] [CrossRef]
- Gapiński, D.; Koruba, Z. Control of Optoelectronic Scanning and Tracking Seeker by Means the LQR Modified Method with the Input Signal Estimated Using of the Extended Kalman Filter. Energies 2021, 14, 3109. [Google Scholar] [CrossRef]
- Amer, N.H.; Zamzuri, H.; Hudha, K.; Petrou, L. Modelling and Control Strategies in Path Tracking Control for Autonomous Ground Vehicles: A Review of State of the Art and Challenges. J. Intell. Robot. Syst. 2017, 86, 225–254. [Google Scholar] [CrossRef]
- Yao, Q.; Tian, Y.; Wang, Q.; Wang, S. Control Strategies on Path Tracking for Autonomous Vehicle: State of the Art and Future Challenges. IEEE Access 2020, 8, 161211–161222. [Google Scholar] [CrossRef]
- Zhao, P.; Chen, J.; Song, Y.; Tao, X.; Xu, T.; Mei, T. Design of a Control System for an Autonomous Vehicle Based on Adaptive-PID. Int. J. Adv. Robot. Syst. 2012, 9, 44. [Google Scholar] [CrossRef]
- Chen, J.; Zhu, H.; Zhang, L.; Sun, Y. Research on fuzzy control of path tracking for underwater vehicle based on genetic algorithm optimization. Ocean Eng. 2018, 156, 217–223. [Google Scholar] [CrossRef]
- Wang, H.; Liu, B.; Ping, X.; An, Q. Path Tracking Control for Autonomous Vehicles Based on an Improved MPC. IEEE Access 2019, 7, 161064–161073. [Google Scholar] [CrossRef]
- Imine, H.; Madani, T. Sliding-mode control for automated lane guidance of heavy vehicle. Int. J. Robust Nonlinear Control. 2013, 23, 67–76. [Google Scholar] [CrossRef]
- Akermi, K.; Chouraqui, S.; Boudaa, B. Novel SMC control design for path following of autonomous vehicles with uncertainties and mismatched disturbances. Int. J. Dyn. Control. 2020, 8, 254–268. [Google Scholar] [CrossRef]
- Wang, L.; Zhu, S.; Liu, Y.; Du, X.; Zhu, Z.; Zhai, Z. A novel path tracking method of tractor based on improved second-order sliding mode considering front wheel steering angle compensation. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2022. [Google Scholar] [CrossRef]
- Han, G.; Fu, W.; Wang, W.; Wu, Z. The Lateral Tracking Control for the Intelligent Vehicle Based on Adaptive PID Neural Network. Sensors 2017, 17, 1244. [Google Scholar] [CrossRef]
- Zhang, X.; Zhu, X. Autonomous path tracking control of intelligent electric vehicles based on lane detection and optimal preview method. Expert Syst. Appl. 2019, 121, 38–48. [Google Scholar] [CrossRef]
- Cho, J.; Huh, K. Active Front Steering for Driver’s Steering Comfort and Vehicle Driving Stability. Int. J. Automot. Technol. 2019, 20, 589–596. [Google Scholar] [CrossRef]
- Wu, Y.; Wang, L.; Zhang, J.; Li, F. Robust vehicle yaw stability control by active front steering with active disturbance rejection controller. Proc. Inst. Mech. Eng. Part I J. Syst. Control. Eng. 2019, 233, 1127–1135. [Google Scholar] [CrossRef]
- Sun, P.; Trigell, A.S.; Drugge, L.; Jerrelind, J. Energy efficiency and stability of electric vehicles utilising direct yaw moment control. Veh. Syst. Dyn. 2022, 60, 930–950. [Google Scholar] [CrossRef]
- Fu, C.; Hoseinnezhad, R.; Li, K.; Hu, M. A novel adaptive sliding mode control approach for electric vehicle direct yaw-moment control. Adv. Mech. Eng. 2018, 10, 1–12. [Google Scholar] [CrossRef]
- Wu, J.; Cheng, S.; Liu, B.; Liu, C. A Human-Machine-Cooperative-Driving Controller Based on AFS and DYC for Vehicle Dynamic Stability. Energies 2017, 10, 1737. [Google Scholar] [CrossRef]
- Sun, T.; Guo, H.; Cao, J.-Y.; Chai, L.-J.; Sun, Y.-D. Study on Integrated Control of Active Front Steering and Direct Yaw Moment Based on Vehicle Lateral Velocity Estimation. Math. Probl. Eng. 2013, 2013, 1–8. [Google Scholar] [CrossRef]
- Ding, N.; Taheri, S. An adaptive integrated algorithm for active front steering and direct yaw moment control based on direct Lyapunov method. Veh. Syst. Dyn. 2010, 48, 1193–1213. [Google Scholar] [CrossRef]
- Zhao, J.; Wong, P.K.; Ma, X.; Xie, Z. Chassis integrated control for active suspension, active front steering and direct yaw moment systems using hierarchical strategy. Veh. Syst. Dyn. 2017, 55, 72–103. [Google Scholar] [CrossRef]
- Ji, Y.; Guo, H.; Chen, H. Integrated control of active front steering and direct yaw moment based on model predictive control. In Proceedings of the 26th Chinese Control and Decision Conference (2014 CCDC), Changsha, China, 31 May–2 June 2014; pp. 2044–2049. [Google Scholar] [CrossRef]
- Shim, T.; Adireddy, G.; Yuan, H. Autonomous vehicle collision avoidance system using path planning and model-predictive-control-based active front steering and wheel torque control. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2012, 226, 767–778. [Google Scholar] [CrossRef]
- Goodarzi, A.; Sabooteh, A.; Esmailzadeh, E. Automatic path control based on integrated steering and external yaw-moment control. Proc. Inst. Mech. Eng. Part K J. Multi-body Dyn. 2008, 222, 189–200. [Google Scholar] [CrossRef]
- Li, B.; Rakheja, S.; Feng, Y. Enhancement of vehicle stability through integration of direct yaw moment and active rear steering. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2016, 230, 830–840. [Google Scholar] [CrossRef]
- Zhang, J.; Li, J. Integrated vehicle chassis control for active front steering and direct yaw moment control based on hierarchical structure. Trans. Inst. Meas. Control. 2019, 41, 2428–2440. [Google Scholar] [CrossRef]
- Chokor, A.; Talj, R.; Doumiati, M.; Charara, A. A global chassis control system involving active suspensions, direct yaw control and active front steering. IFAC PapersOnLine 2019, 52, 444–451. [Google Scholar] [CrossRef]
- Yao, X.; Gu, X.; Jiang, P. Coordination control of active front steering and direct yaw moment control based on stability judgment for AVs stability enhancement. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2022, 236, 59–74. [Google Scholar] [CrossRef]
- Chen, J.; Shuai, Z.; Zhang, H.; Zhao, W. Path Following Control of Autonomous Four-Wheel-Independent-Drive Electric Vehicles via Second-Order Sliding Mode and Nonlinear Disturbance Observer Techniques. IEEE Trans. Ind. Electron. 2021, 68, 2460–2469. [Google Scholar] [CrossRef]
- Chen, T.; Cai, Y.; Chen, L.; Xu, X.; Jiang, H.; Sun, X. Design of Vehicle Running States Fused Estimation Strategy using Kalman Filters and Tire Force Compensation Method. IEEE Access 2019, 7, 87273–87287. [Google Scholar] [CrossRef]
- Zhou, C.; Liu, X.-H.; Xu, F.-X. Intervention criterion and control strategy of active front steering system for emergency rescue vehicle. Mech. Syst. Signal Process. 2021, 148, 107160. [Google Scholar] [CrossRef]
- Chen, W.W.; Tan, D.K.; Wang, H.B.; Wang, J.; Xia, G. A Class of Driver Directional Control Model Based on Trajectory Prediction. J. Mechinal Eng. 2016, 52, 106–115. [Google Scholar] [CrossRef]
- Tan, Q. Dimersional Analysis; Press of University of Science and Technology of China: Hefei, China, 2005. [Google Scholar]
- Liu, J.; Song, J.; Li, H.; Huang, H. Direct yaw-moment control of vehicles based on phase plane analysis. Proc. Inst. Mech. Eng. Part D: J. Automob. Eng. 2022, 236, 2459–2474. [Google Scholar] [CrossRef]
- Zhou, W.; Xu, Z. Asymmetric hesitant fuzzy sigmoid preference relations in the analytic hierarchy process. Inf. Sci. 2016, 358-359, 191–207. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vehicle Orientation | Vehicle Status | Brake Wheel Chosen | The Braking Torque | |
|---|---|---|---|---|
| Turn left | (Understeering) | + | Left rear | |
(Oversteering) | − | Right front | ||
| Turn right | (Understeering) | + | Left front | |
(Oversteering) | − | Right rear |
| Velocity/(km/h) | Road Adhesion Coefficient | Critical Front Wheel Angle/(°) |
|---|---|---|
| 60 | 0.2 | 1.625 |
| 90 | 0.2 | 1.125 |
| 120 | 0.2 | 0.625 |
| 60 | 0.5 | 3.125 |
| 90 | 0.5 | 1.375 |
| 120 | 0.5 | 1.125 |
| 60 | 0.8 | 4.875 |
| 90 | 0.8 | 2.125 |
| 120 | 0.8 | 1.375 |
| Parameter Name | Value | Unit |
|---|---|---|
| Vehicle mass | 1412 | |
| Distance of the front axle from CG | 1.015 | |
| Distance of the rear axle from CG | 1.895 | |
| Height of gravity center | 0.65 | |
| Cornering stiffness of the front wheel | 112,600 | |
| Cornering stiffness of the front wheel | 112,600 | |
| Wheelbase | 1.675 | |
| Wheel rolling radius | 0.325 | |
| Yaw moment of inertia | 1536.7 |
| Maximum | Minimum | Range | Std. Deviation | |
|---|---|---|---|---|
| DYC | 15.53 | −9.578 | 25.11 | 5.73 |
| AFS&DYC | 10.83 | −8.209 | 19.03 | 5.273 |
| Maximum | Minimum | Range | Std. Deviation | |
|---|---|---|---|---|
| DYC | 2.022 | −0.5435 | 2.565 | 0.3999 |
| AFS&DYC | 0.6659 | −0.406 | 1.072 | 0.1955 |
| Maximum | Minimum | Range | Std. Deviation | |
|---|---|---|---|---|
| DYC | 10.28 | −13.82 | 24.09 | 4.907 |
| AFS&DYC | 9.656 | −9.065 | 18.72 | 4.651 |
| Maximum | Minimum | Range | Std. Deviation | |
|---|---|---|---|---|
| DYC | 2.022 | −0.5435 | 2.565 | 0.3999 |
| AFS&DYC | 0.6659 | −0.406 | 1.072 | 0.1955 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, J.; Liu, H.; Wang, J.; Gu, H. Coordinated Lateral Stability Control of Autonomous Vehicles Based on State Estimation and Path Tracking. Machines 2023, 11, 328. https://doi.org/10.3390/machines11030328
Liu J, Liu H, Wang J, Gu H. Coordinated Lateral Stability Control of Autonomous Vehicles Based on State Estimation and Path Tracking. Machines. 2023; 11(3):328. https://doi.org/10.3390/machines11030328
Chicago/Turabian StyleLiu, Jun, Haohao Liu, Jingjing Wang, and Honggang Gu. 2023. "Coordinated Lateral Stability Control of Autonomous Vehicles Based on State Estimation and Path Tracking" Machines 11, no. 3: 328. https://doi.org/10.3390/machines11030328