Abstract
The current mobility situation is constantly changing as people are increasingly moving to urban areas. Therefore, a flexible mode of transport with high-capacity passenger trains and a high degree of modularity in the trains’ composition is necessary. Virtual coupling (VC) is a promising solution to this problem because it significantly increases the capacity of a line and provides a more flexible mode of operation than conventional signaling systems. This novel review, in which approximately 200 papers were analyzed, identifies the main topics of current railway-related VC research, and represents the first step toward the implementation of VC in future railways. It was found that industry research has mainly focused on the feasibility of VC implementation and operation, whereas in academia, which is coordinated with industry, research has focused on control and communication systems. From a technological perspective, the main challenges for VC were identified with regard to aspects such as safety, control technology, interlocking, vehicle-to-vehicle communication, cooperative train protection and control, and integrated traffic management. The important directions for future research that have been identified for future development include complete dynamic models, real-time controllers, reliable and secure communication, different communication topologies, cybersecurity, intelligent control, reinforcement learning, and Big Data analytics.
1. Introduction
The current mobility situation is constantly changing as people are increasingly moving to urban areas. Meanwhile, people living in city centers and metropolitan areas tend not to use cars; thus, there is an increasing demand for efficient, modern, punctual, and environmentally sustainable transportation.
This growth in the demand for rail transport was reported in [1]. According to this report, which describes the increase in the number of passengers (in short scale billions) per kilometer traveled for the countries of the European Union (EU) between 2010 and 2019, the number of passengers per kilometer has increased by 17.6% in the EU (EU-27), from 358.3 to 421.4 billion passengers per kilometer.
This increased demand can be met by increasing the number of lines or the capacity of the existing lines. Construction of new lines was the first solution to be proposed. However, this has not been the general policy of all countries and is often expensive. Therefore, the second solution is to increase the capacity of existing railway lines. In this context, given that demand for rail transport is heterogeneous and varies both between and within lines, depending on the time of day and time of year, a flexible mode of transport with high-capacity passenger trains and a high degree of modularity in the trains’ composition, wherein the railway operator can vary the configuration of trains according to the expected passenger demand, is necessary.
As a solution to these problems, the railway sector has focused its efforts on increasing the capacity and flexibility of lines by improving the current railway operation. Research has focused on increasing capacity by reducing the headway or the distance between trains. Moreover, railway traffic control and signaling systems based on moving block systems (MBSs) have been developed, such as the Communication-Based Train Control (CBTC) system [2], which is mainly used in urban and Automated People Mover (APM) railway lines, and the European Rail Traffic Management System (ERTMS L3) [3] for main and commuter lines.
Additionally, the coupling of train units to form consists has been proposed for enhancing the average passenger train speed, energy efficiency, and capacity utilization of railway infrastructure, among other aspects. The capability of dynamic coupling and uncoupling of train units at cruise speeds was suggested. Two operating concepts can be realized via dynamic coupling [4,5]: dynamic mechanical coupling to mechanically change the composition of the consists at the cruising speed, and virtual coupling (VC) to virtually change the composition of the consists at the cruising speed via communication. In the previous first approach [6], vehicle movements are managed using distance control and vehicle-to-vehicle communication during the approach. Here, a safe active impact absorption system is necessary when the two units move together to form a consist. In this situation, the units are stabilized, held, and guided during the coupling and uncoupling process.
The previous second approach is based on the use of VC to virtually change the compositions of the consists at the cruising speed via communication. Thus, VC is a train-centric next generation signaling system that enables multiple trains to operate in a formation just like one train or decouple separately, either on the run or at station, flexibly or as planned. VC is an evolution of the current MBSs, similar to the way in which road vehicles operate, where vehicles run at a safe distance from the vehicle in front and the driver reacts to the brake lights of the vehicle in front, and this safe distance is far shorter than the braking distance required for a complete stop, as considered in current MBSs.
Clearly, more trains can run on the line if the spacing between trains is reduced. Thus, the line capacity is increased. In [7], a multi-state train-following model was developed for describing VC procedures by conducting a comparative capacity analysis with other signaling systems. The results indicated that VC has a superior capacity to MBSs, and it was estimated that VC could reduce the distance between trains by 64% for European Train Control System (ETCS) Level 2 and by 43% for ETCS Level 3.
Consequently, in addition to increasing the capacity of the line, VC can provide a more flexible mode of operation, with trains behaving as if they are physically coupled. This makes it possible to run trains in smaller sets but adapt to the circumstances. As reported in [8,9,10], this functionality is particularly relevant at turnouts and stations, where VC can be canceled before approaching the station and trains can stop at different platforms at the same station, allowing the entire convoy to disembark. After stopping, trains can either recouple or continue as two separate convoys to different destinations.
The objective of this study, and its novelty, was to comprehensively review the use of VC in railways. Approximately 200 papers were analyzed, identifying the state of the art of the main topics of current railway-related VC research. Thus, this study represents the first step toward the implementation of VC in future railways. Finally, we present our perspective on the main future research challenges identified for VC, with regard to aspects such as safety, interlocking, control technology, vehicle-to-vehicle communication, cooperative train protection and control, and intelligent and integrated traffic management.
The remainder of this paper is organized as follows: Section 2 outlines the methodology used for the bibliometric analysis. Section 3 includes the terminology and definitions used in the VC framework. Section 4 presents a historical review of the background, origin, and the concept of the VC system. Section 5 discusses the main topics covered in VC research. Section 6 addresses future research issues. Finally, Section 7 concludes the paper.
2. Review Methodology and Publications Overview
This section describes the procedure of mining and classifying papers from the reviewed publications. Subsequently, it also provides from different perspectives a distribution analysis of the papers resulting from this process.
2.1. Literature Review Methodology
The Scopus [11] and Web of Science (WoS) [12] databases were used as primary sources, with Google Scholar [13], ResearchGate [14], and IEEE Xplore [15] as supplementary sources, to provide a comprehensive overview of the state of the art of VC applications in rail systems. An initial search using the keyword “virtual coupling railroad” was performed, where the scope was limited to academic papers in English from January 1990 to March 2023. This provided an initial set of publications that were used to refine the search.
The second step was the use of Inciteful [16]. Inciteful provides two tools: paper discovery and the literature connector. The five publications with the highest impact obtained with the initial search [7,17,18,19,20] were used with Inciteful to obtain information on several dimensions: similar articles, most important articles, review papers, most important recent articles, and top authors. This provided a more extended set of references, which was refined by further searches in Scopus, WoS, Google Scholar, and ResearchGate, obtaining the set of references considered in this paper. Finally, it should be noted that only references accessible through DOI or open access have been included in this study, while references whose content was not accessible have not been considered.
2.2. General Publications Overview
The above searches resulted in a total of 131 records: 78 in WoS, extended to 114 with Scopus, and completed to the total with Google Scholar and ResearchGate.
Using the analytical tools of Scopus and WoS, it was possible to perform certain analyses with this information, such as publications by year, by type of document, by country or region, or by source of funding. An initial analysis is found in Figure 1 and Figure 2.
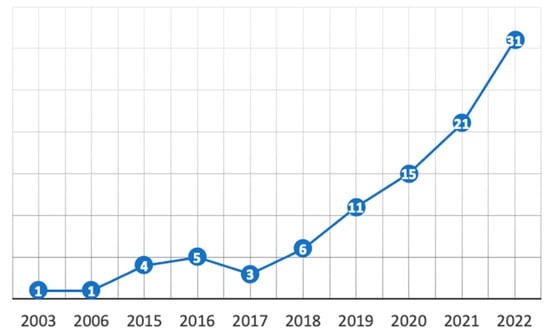
Figure 1.
Documents by year (source: Scopus).
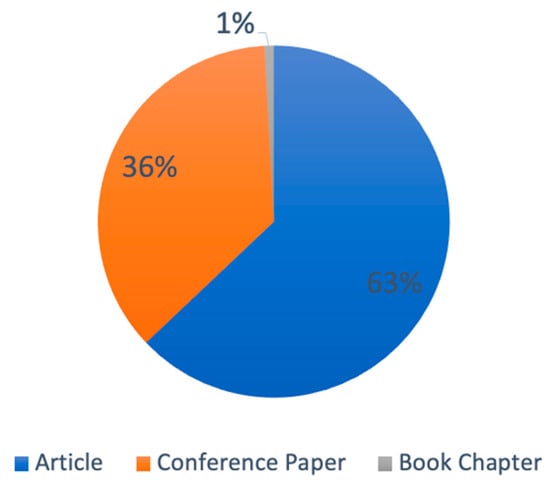
Figure 2.
Documents by type (source: Scopus).
Figure 1 shows the evolution of publications per year (except 2023, because only three months of data were available and it was not possible to compare with full years). Figure 1 shows an almost exponential growth at this time, which is evidence of the interest of the subject of study.
In addition, Figure 2 shows documents by type, with the majority of publications in journals, compared to conferences, but it should be noted that a significant number of conferences do not include indexed proceedings, so the number of publications in conferences will probably be higher than that reported in Scopus.
3. Terminology and Definitions
The following terms and definitions are used in this paper:
| Moving block system (MBS) | Signaling and train management system based on moving blocks. |
| Fixed block system (FBS) | Signaling and train management system based on fixed blocks. |
| Trainset | Single vehicle or group of mechanically coupled railway vehicles with at least one power unit. |
| Consist | A trainset, i.e., a train formation. A consist is defined as a single vehicle or group of vehicles that are not separated during normal operation and have a specific traction and braking capability. |
| Virtual coupling (VC) | Evolution of the moving block concept based on the relative braking distance. |
| Virtually coupled train set (VCTS) | A group of separate trains that are virtually connected and behave as unique coupled trains. A VCTS is defined by two or more consists, which are not connected mechanically. |
| Convoy | A VCTS, i.e., a platoon of trains. |
| Platoon | A group of physically uncoupled vehicles that behave as a single vehicle. |
| Leader | In a VCTS, the first train in the convoy. |
| Followers | In a VCTS, all the trains of a convoy except for the first train. |
| Train positioning (TP) | This refers to the information generated by a function external to the VC, which mainly provides the distance traveled (or absolute position) and speed measurement with an appropriate level of safety integrity to support the functions of the VC. |
| Communication-Based Train Control (CBTC) | Moving block train control system associated with the IEEE 1474 standard. |
| European Rail Traffic Management System (ERTMS) | EU initiative for managing railway lines through interoperability among different rail networks. Currently, it officially specifies three basic levels of operation with an increasing level of technological complexity, from fixed block-based Level 1 (L1) to moving block-based Level 3 (L3). |
| European Train Control System (ETCS) | Railway controller in the ERTMS. |
| Chinese Train Control System (CTCS) | Railway controller developed in the People’s Republic of China. It is based on four basic levels of increasing technological complexity, from the fixed block-based Level 1 (L1) to the moving block-based Level 4 (L4). |
| Information Technology (IT) | Hardware and software systems that allow for the management and exchange of data. |
| Railway company | In railway-liberalized countries, railway companies are classified into two main groups: railway operators and infrastructure managers. A railway operator (also known as a railway undertaking in the European regulation) is a type of railway company that offers passenger and/or freight services, whereas an infrastructure manager is a type of railway company that owns the infrastructure and acts as its administrator. |
4. Background and Concept of VC
4.1. Railway Virtual Coupling System Concept
There are two approaches to ensure the safe movement of trains. One is the fixed block system (FBS) approach, which divides the track into specific subareas called blocks in order to determine the location of a train on the track, as shown in Figure 3. In the FBS approach, only one train can occupy a block. The length of a block depends on several factors, such as the maximum speed allowed, geographical conditions, etc. In addition, the length of a block can vary from a few hundred meters to several kilometers. These systems have been used successfully. However, they are not sufficient for high-capacity rail lines.

Figure 3.
Fixed block system.
The need to increase line capacity, supported by the development of telecommunications, IT, and control techniques, has driven train operation control systems from FBSs, which are applicable, for instance, to the ERTMS L1/L2 system, to moving block systems (MBS).
The MBS is a system where the blocks are defined and calculated in real time as safe zones around each train (Figure 4). This real time–block calculation requires both knowledge of the exact location and speed of all trains at any given time, and continuous communication between the central signaling system and the on-board train signaling system. Thus, the MBS is a system where consists continuously calculate and communicate their exact positions and speeds (TP) to the track equipment along the line, which allows for the calculation of the area of the track that is potentially occupied by the train and allows the trains to adjust their speeds automatically and continuously.
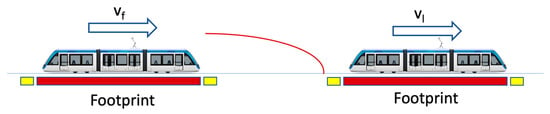
Figure 4.
Moving block system.
There are two modes of train operation control in the MBS [21,22]: the Absolute Distance Braking Mode (ADBM) and the Relative Distance Braking Mode (RDBM). These two control modes have different efficiencies and risks.
The ADBM (Figure 5) is based on the concept that two consecutive consists running on the same track must always be separated by a sufficient margin to ensure that each train can reduce its speed and will be able to stop before reaching the last known position on the track of the consist immediately preceding it, regardless of the current speed and the braking curve of the preceding consist.

Figure 5.
Absolute braking.
In the ADBM, the position of the follower consist is calculated as follows:
where represents the minimum safe distance between two consecutive consists, represents the position of the leader, and and represent the velocity and braking deceleration of the follower, respectively.
The ADBM is applied in CBTC [2] and in ERTMS Level 3 [3]. However, its conservative character results in trains tending to run far apart.
Depending on the braking decelerations of the two consecutive consists, the safety margin between two trains can be reduced by applying RDBM principles. RDBM concepts have been widely applied in control systems for road traffic, autonomous vehicles, and platoon cars. The RDBM system is similar to the on-road mode of operation, where vehicles drive at a safe distance from the vehicle in front and the driver reacts to the brake lights of the vehicle in front, which is far shorter than the required braking distance for a full stop. This idea is fundamental to vehicle platooning and autonomous vehicles.
In the RDBM, it is assumed that two consecutive consists are in motion, and depending on their braking speeds, the safety margin between them can be reduced. Thus, if the first consist (leader) is running at speed and braking with deceleration and the second consist is running at speed and braking with deceleration , the position of the follower can be calculated as follows:
Figure 6 shows a schematic of the relative braking concept.
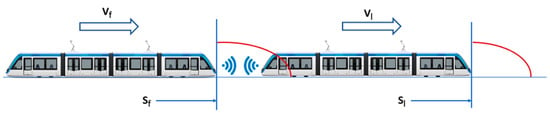
Figure 6.
Relative braking.
In order to realize dynamic train coupling, position and speed information must be reliably exchanged between trains [23]. New communication technologies offer this ability of direct communications between vehicles with a high rate and low latency.
The relative braking model is closely related to collaborative operations. The VCTS uses train-to-train (T2T) communication for sharing information between the intra-VCTS consists and receiving the reference signals from the infrastructure. According to this information, the on-board system is responsible for the safe tracking of the speed profiles, and it should also respect the spacing policy between trains and allow the follower to safely follow the lead train.
The VCTS requires sensors to know at all times the relative distance to and velocity of the preceding consist. It also requires a communication link between consists for them to exchange information such as their positions, velocities, and accelerations. Following the approach described above, functional requirements must be derived for the sensors and communication systems of the VCTS. Sensors are needed to determine the absolute position, relative position (or distance) between trains, relative and absolute velocities, and acceleration. Regarding communication, it is necessary to define how often this information must be exchanged between trains, as well as the type of information and the amount of data.
The Institution of Railway Signal Engineers (IRSE) provided in its white paper [24] a preliminary analysis of the concept of virtual coupling, which involved an assessment of whether it is technically feasible and safe. It also noticed that virtual coupling would bring real benefits such as increased line capacity and greater flexibility in railway operation.
4.2. Virtual Coupling System Evolution and Development
The concept of virtual train operation was first introduced in [25,26], where the authors presented an operating railway concept that represents a middle ground between current road and rail traffic in which the wagons are not physically coupled and each wagon has its own driving and control system. This concept does not use block systems, and the vehicles run within a distance as short as that shown by mechanically coupled coaches. This paper describes the methods for designing and developing the concept but provides limited details regarding its implementation.
Similarly, refs. [27,28,29] proposed basic ideas and principles of VC. Reference [27] proposed an approach for improving the rail traffic performance and attracting customers in the freight sector by suggesting restructuring rail management systems (RMSs) employing distributed information systems. This paper describes the structure of a future RMS that fulfils the essential requirements of an RMS and serves as a “transport service management system”. For its realization, the agent theory is suggested as an enabling technology based on wireless communication and satellite positioning. In addition, [28] introduced the terminology of virtually coupled train formations, which feature compact and automated module trains that can combine themselves dynamically during a trip. This paper discusses the basic concept and methodological approach and presents results demonstrating the functionality of the concept. Moreover, [29] described an approach for a rail freight traffic management system using agent technology designed to allow small, autonomous transport units called module trains to operate flexibly alongside conventional trains. This paper provides a system overview and describes the main tasks of transport planning and operation, including the description of an improved headway control system as an extension to ETCS Level 3.
Finally, ref. [30] proposed autonomous rail vehicles that can be dynamically grouped into convoys without mechanical coupling. They also presented convoy communication regarding the joining (coupling) and leaving (decoupling) of a convoy, as well as a convoy control strategy. Moreover, ref. [31] presented an operational and safety concept for railway operation with a platoon of trains linked by a wireless informational interconnection instead of a conventional mechanical connection.
In summary, the first VC concepts appeared in 1999 and these concepts were consolidated until 2006. However, their freight-oriented approach and the limitations of existing technology at that time may have prevented them from reaching their potential. Thus, the concept of VC, which is undoubtedly novel and disruptive, did not progress. Only when the European Research Initiative Shift2Rail [32] appeared did VC receive a new impulse, mainly motivated by the need to increase the capacity of passenger rail lines in mass transit and by advances in communication technology. Shift2Rail included VC as one of the priority research and innovation topics in its strategic master plan document [33], which was developed within the IP2 Innovation Programme called Advanced Traffic Management and Control Systems.
Thus, ref. [34] presented the enablers and technologies needed for the implementation of VC within the Shift2Rail initiative, explaining how emerging information technologies make the introduction of such a concept in railways feasible, while the leverage effect of the automotive industry and its considerable sales will both reduce the costs and smooth the acceptance of the concept. Moreover, reference [9] presented examples of VC in railway operations for different scenarios that promise potential benefits.
Both the EU, initially through Shift2Rail [33] and currently through Europe’s Rail Joint Undertaking [35], and various Chinese research programs such as the National Key R&D Program of China [36] and the National Natural Science Foundation of China [37], have actively supported research in the field of VC. Considerable research has also been performed within academia, often in connection with the aforementioned projects.
Motivated by the Shift2Rail initiative, several research projects have developed this concept. Of particular relevance are the EU-funded projects X2RAIL-3 [8] and MOVINGRAIL [38].
In X2RAIL-3 [8], researchers established the overall performance, functional, and safety requirements for the VCTS, developed a potential technological solution architecture, and studied its business case, among other objectives. According to the results of this project, reference [39] performed a technical feasibility analysis and developed an implementation strategy for the VC concept.
In MOVINGRAIL [38], researchers studied train-centric signaling from technological, operational, and economic viewpoints. It was then applied to the MBS and VC at several stages, yielding differences from the conventional FBS. In the framework of VC, formal methodologies and simulation tools have been used to benchmark and propose radio-based communication architectures that consider T2T communication. In addition, the project included an update involving a comparison and analysis of the automatic and communication solutions for autonomous trains. Moreover, in this project, the market feasibility and applicability of VC were studied via a strengths, weaknesses, opportunities, and threats (SWOT) analysis for different railway market segments.
In connection with this project, reference [40] investigated the market potential and preliminary operational scenarios of VC and presented the results of an extensive stakeholder survey in the European railway industry that collected experts’ opinions regarding the potential and challenges of VC. Additionally, a SWOT analysis was performed for several railway market segments, and the results revealed that VC has significant benefits for reducing the operating expenses and communication latency. However, its weaknesses include the increased capital expenditures and safety issues at diverging junctions, particularly when heterogeneous trains are involved. Moreover, there are environmental threats to VC deployment related to the possible increase in ticket charges, the complexity of T2T communication, safety issues of RDBM operations, and market deregulation. Nonetheless, VC provides opportunities for both infrastructure managers and railway undertakings.
In addition, reference [41] used a hybrid Delphi–analytic hierarchy process approach to evaluate the impact of innovations in railway signaling, with a focus on the operational, technological, and business domains. Their qualitative results indicated that safety is an important issue for all stakeholders, that the hazard of a serious failure may threaten the acceptance of public and regulatory bodies, and that prompt clarification of regulations and cooperation with regulators is essential for the successful implementation of these developments. Furthermore, [42] developed a technological roadmap for VC implementation, with a focus on the mainline market segment.
Finally, SCOTT [43] and InsecTT [44] are EU projects that aim to integrate track and train information in a centralized cloud-based platform to provide end users with value-added services within the rail market. They also provide fully safe and secure Infrastructure-to-Vehicle/Vehicle-to-Infrastructure (I2V/V2I) and Vehicle-to-Vehicle (V2V) communication technology that fulfils rail standards to allow the exchange of the necessary information and to make VCTS reliable. At the same time, they aim to enhance the current Automatic Train Operation (ATO) and Automatic Train Protection (ATP) systems by using artificial intelligence (AI) and the Internet of Things (IoT) to make the railway market more competitive. Regarding this project, reference [45] presented results of applying VC.
Once again, the analytical tools of Scopus and WoS make it possible to identify the main players involved in VC technological development.
For example, Figure 7 shows the number of documents by funding agency, and Figure 8 shows the number of documents by affiliation, including the most important institutions, companies, and universities involved in VC.
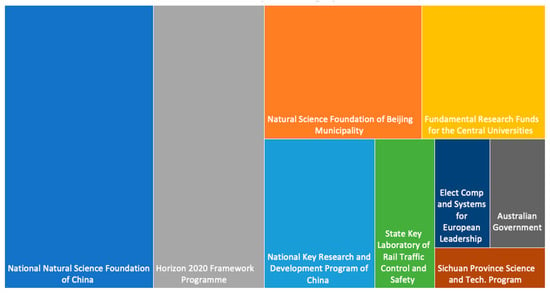
Figure 7.
Documents by funding sponsors (with more than 4 publications). Source: Scopus.
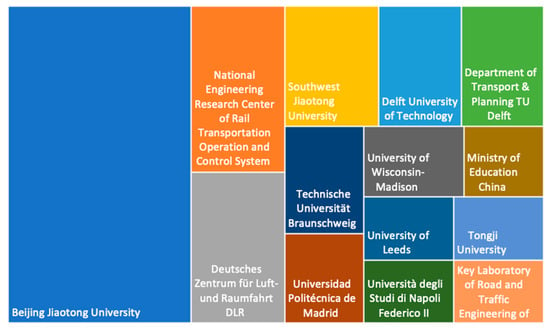
Figure 8.
Documents by affiliation (with more than 4 publications). Source: Scopus.
It should be noted that these figures only represent the number of publications, and this number is not directly correlated with the economic amount of funding sources. The economica data, although very interesting, are not available because, while funding from the EU is public and open, there are no data accessible on funding from Chinese entities.
5. Research in the Field of Virtual Coupling
5.1. Methodology Used for the Identification of the Most Important Research Topics
In order to identify the most important research topics that affect the development of VC, the VOSviewer [46] tool was used together with the authors’ own knowledge of VC technology.
VOSviewer is a software tool for constructing and visualizing bibliometric networks. These networks are constructed based on citation, bibliographic coupling, co-citation, or co-authorship relations. This tool uses natural language processing techniques for creating term co-occurrence networks based on English-language textual data, where relevant and non-relevant terms can be distinguished algorithmically.
We used the text mining functionality of VOSviewer to build and visualize co-occurrence networks of the most important terms and keywords extracted from the considered references. Thus, the first step was to extract and identify the main keywords, choosing as a criterion the keywords that appear more than five times in the analyzed papers.
Once the main keywords have been identified, the map establishes the links between the terms and their strength. A link is defined as a connection or relationship between two items in the map, and a link strength is defined as a number indicating the number of publications in which two terms appear together.
As a result of the bibliographic analysis, the following have been obtained as the most important keywords, also indicating the associated number of their importance: virtual coupling (53), model predictive control (20), train operation (11), cooperative control (11), robust control (10), train control systems (9), optimal control (8), consensus-based control (8), vehicle-following models (6), stochastic control (6), moving block (6), communications (6), transport management (5), intelligent control (5), adaptive control (5), distributed control (4), and sliding mode control (3).
These elements have been grouped into clusters, where a cluster is a set of elements contained in a map. A cluster links closely related terms, taking into account that clusters in VOSviewer are non-overlapping, i.e., an element can only belong to one cluster. Two clusters have been found:
- Cluster 1: virtual coupling, train operation, train control systems, communications, moving block, and transport management.
- Cluster 2: model predictive control, cooperative control, robust control, consensus-based control, optimal control, stochastic control, vehicle-following models, adaptive control, intelligent control, distributed control, and sliding mode control.
Figure 9 shows the terms, links, and clusters used to identify the main research topics in VC. Analyzing the terms grouped in each cluster, cluster one is related to the use of VC, while the second cluster is related to control techniques. The size of the circle of each term is associated with the number of times the term appears, while the thickness of the link is associated with the strength of the link.
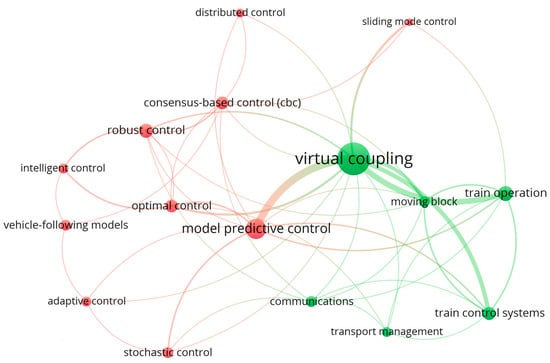
Figure 9.
Main research topics identification.
Based on this analysis, the following sections describe the state of the art of the different technologies involved in VC.
5.2. Control Architectures
VC is intended to be applied to different railway market segments: high-speed, mainline, regional lines, urban transport, metro, and light rail [47].
Most of them are expected to implement VC as an additional function over ERTMS L3, so that trains will be able to receive convoy joining information from a central control system via a network connection. In these lines, which are mainly high-speed and main lines, VC requires the exchange of cooperative awareness messages (CAMs) over unsuitable distances for properly linked direct communication with current technology. This is why these trains are expected to be equipped with a new rail communication technology called Future Rail Mobile Communications System (FRMCS) [48].
In comparison, metro market segments have conventionally been controlled using more sophisticated communication-based frameworks. For consistency with these conventional systems, VC in metro systems can be based on the same communication technologies for the required direct T2T communication. Similarly, because the light rail and tram market segments are closer to the automotive sector in braking distances than the rest of the market segments, they can benefit from automotive V2V communication technology.
Consequently, VC has been analyzed for application in different sectors. Some references present results for high-speed lines [9,20,49,50,51], whereas others present results for metros [18,52,53,54,55,56]. There are also several papers that present results for ultrahigh-speeds trains, e.g., Maglev [9] and Hyperloop [57].
Because of this heterogeneity within market applications, multiple control architectures with different control architectures and communication topologies have arisen, which are a field of active research. Thus, two types of architectures have been developed: centralized (also called cooperative) and decentralized (also called distributed).
In the centralized architecture, a unique controller, the Centralized Traffic Control (CTC), searches for intertrain cooperation via a global optimized strategy for the entire convoy (Figure 10). This is the case in train-to-infrastructure (T2I) communication for high-speed and mainline railways. Several papers have presented results in this field; for example, reference [58] presented a centralized model predictive control (MPC) with a non-linear safety equilibrium spacing policy for terrains with a gradient.

Figure 10.
Centralized control architecture.
In the decentralized architecture, each train has a single controller, and the VC control in the convoy is achieved through a leader–follower relationship. There are two possible applications of this architecture. First, each train can calculate its own driving strategy according to the estimated trajectory of the vehicle(s) ahead [18]. Second, the leader can send commands to followers ordering them to follow at a certain distance and speed [24]. In both cases, the control analysis and synthesis of the multi-vehicle formation is considered to be a one-dimensional networked dynamic system in which the platoon stability depends on the communication topology and the type and quality of the information exchanged, which has been the object of intensive research [59,60]. Figure 11 shows the typical communication topologies used in distributed control architectures. The information exchanged can be unidirectional or bidirectional, it can be between two successive vehicles or non-successive vehicles, and it can include everything from the current speed and acceleration of the train to more complete details such as predictions thereof.
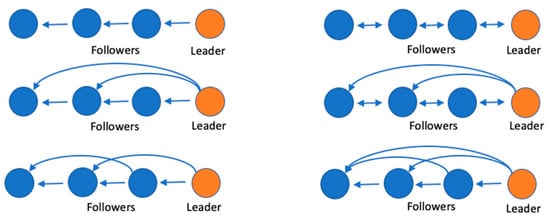
Figure 11.
Communication topologies used in distributed control architectures.
These architectures have been widely used in the field of vehicle platooning, where there is no V2I communication. Several studies on these architectures have been performed in the field of vehicle platooning [59,60,61,62,63,64,65,66,67].
In the field of railways and VC, distributed and decentralized control schemes are presented in [18,45,49,55,68,69,70].
However, there is no clear preference for one of these architectures over the other, and their use in VC is actively researched.
5.3. Dynamic Model
One of the most important aspects to be considered in the control model is the dynamic model of the train. A comprehensive overview of the longitudinal train dynamics can be found in [71]. In most studies, a one-degree-of-freedom model was used in the direction of longitudinal motion, where the train was considered as a point mass located at the front of the train.
This point-mass model is used under the assumption that the length of the train is constant when the train is in motion. This assumption is valid for multi-unit passenger trains, which most publications focus on, but may not be realistic for long freight trains, where the elasticity in the couplings of consists with a large number of wagons may cause the length of the train to oscillate during its motion.
The point mass model is based on the following Equation (3):
where denotes the position of the train, represents the velocity of the train, represents the total force applied by the traction or braking actuators, represents the train mass, and represents the total longitudinal resistance.
The total longitudinal resistance () includes the longitudinal train resistance given by the Davis formula () as well as the additional resistances due to the track grade () and track curves (). Hence, is calculated by Equation (4), where the Davis coefficients are in N, in N/(m/s), and in N/(m/s)2, in m/s2 represents the gravitational acceleration, in m/m represents the grade of the track, and in m represents the absolute curve radius of the track. The formulae and their interpretations are shown in Figure 12.
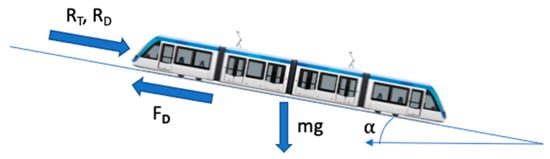
Figure 12.
Point mass model.
The resistances due to the track grade () and track curves () depend on the location of the train on the track. Figure 13 shows the typical track profile of a metro line and the speed profile of the train. Here, the curve labelled “Max speed” represents the maximum speed limits in the line design. Furthermore, the curve labelled “DP speed” represents the course of maximum running speed in compliance with the speed limit given by “Max Speed”. This speed curve was obtained via dynamic programming (DP), as described in [18].
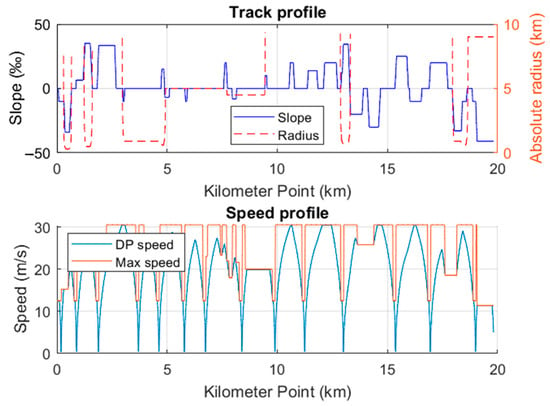
Figure 13.
Example of track profile for a metro line.
To obtain an effective control model, it is necessary to properly estimate the parameter values required for the dynamic model. These values are often difficult to obtain and depend on a specific rolling stock. As an order-of-magnitude reference, Table 1 represents the average values for the different types of rolling stocks. Particular examples of these values can be seen in [45].

Table 1.
Average values of the general parameters, depending on the type of rolling stock.
The values of these parameters can depend on the driving conditions; for example, the mass of the vehicle depends on the number of passengers, or the aerodynamic drag coefficient is affected by meteorological conditions. Therefore, researchers have considered possible variations in these parameters through uncertainties.
A fundamental aspect of railway dynamics is aerodynamic drag, which is the most significant resistance effect particularly at high speeds. Owing to its importance, this topic has been extensively analyzed via computational fluid dynamics (CFD) simulations and experimental tests, for single vehicles and mechanically coupled vehicles, in open and tunnel environments [72,73,74,75,76,77,78].
An issue more closely related to VC is the suction phenomenon induced by VC, which can be a beneficial source of energy saving, as the trains are closely spaced. The first results for the effect of the distance between two consecutive vehicles on the aerodynamic drag were presented in [79].
Similarly, reference [80] presented the results of force measurements for a convoy of two trains at varying distances in the heading direction in the water towing tank at the German Aerospace Center Göttingen. Compared with a single vehicle, the trailing vehicle exhibited a drag reduction of up to 30.4% at all distances.
Reference [81] performed CFD simulations to analyze the aerodynamic effect in different scenarios and found that VC reduced the drag coefficient of the entire convoy by up to 27%, corresponding to a power gain of approximately 4% of the total traction power required for a single smart cabin (~200 kW).
Finally, references [82,83,84] developed a scalable parallel-computing architecture for high-fidelity VC simulations in which train dynamics are represented by multi-body models that consider several non-linear effects, including suspensions, wheel–rail contact, and intervehicle connections.
5.4. Control Methods Used in Virtual Coupling
Regarding control techniques, one of the most important topics related to VC is the choice of control laws that optimize the spacing between consists while preserving safe operations. Therefore, it is essential to select the most suitable control method to address this issue. Reference [85] conducted a survey of the latest control methods, including the latest research on emerging autonomous control systems, analyzing their pros and cons. Reference [86] presented a comprehensive literature review of ATO technology for railways, including train speed control methods. Finally, references [87,88] reviewed the control methods that are suitable for VC railway operation maneuvers. The main control methods used in VC operations are summarized below.
5.4.1. Vehicle-Following Models
Vehicle-following models refer to how a vehicle that follows a leading vehicle reacts to the motion of the leading vehicle. They have been widely used in applications involving road-traffic simulation to investigate traffic flow characteristics, safety, and capacity. Reference [89] performed a systematic review of these control methods. The train-following model gives the relationship between the maximum permitted speed of the train over the rail segment or block (travel time on the block) and the location of the leading train. Figure 14 shows the basic idea of this control method.

Figure 14.
Vehicle-following model.
There are several publications that consider these models. First, reference [7] developed a train-following model that deals with operational states and the corresponding transitions of trains running using VC. In addition, reference [10] used a train-following model to assess the impacts of VC on the railway capacity.
In [90], a mesoscopic train-following model was introduced that accurately captured train interactions and predicted delays according to the spacing between trains.
Reference [91] proposed a multi-train cooperation control based on a leaderless and leader–follower mechanism using VC and the artificial potential field (APF) theory. A potential function is developed according to the relationship between the trains such that the train flow can flexibly match the unbalanced passenger flow.
In reference [92], a VC scheme based on the APF method is also proposed. In this case, the local leader–follower method uses variable parameters to perform anti-collision and collaborative control for a train system with non-linear dynamics.
Moreover, [93] used a VC architecture to compare blocking time models under different train control systems. The comparison was performed for eight typical train-following scenarios, including the cases of departure and train arrival.
In addition, ref. [94] designed a stable linear control architecture for VC based on the relative braking distance and proved its effectiveness for maintaining the equilibrium spacing policy. The designed scheme was analyzed in the frequency domain using the Laplace transform to evaluate the effect of the braking capability on the string stability with regard to the acceleration and spacing difference.
Reference [95] maximized the energy efficiency by synchronizing the speeds of trains in an MBS and demonstrated the possibility of gaining time and energy benefits.
In [96], a fusion controller is proposed based on feature-based generalized model prediction (GPC) and a variable parameter artificial potential field to control the virtually coupled train and prevent collisions.
Finally, reference [97] investigated the potential of VC in railways by composing stochastic activity network model templates.
5.4.2. Feedback Controllers
For most real systems, it is expected that their mathematical models are imperfect. Thus, most controllers use state measurements to perform the proper control actions. This is known as feedback regulation (Figure 15).
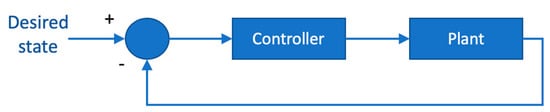
Figure 15.
Feedback controllers.
Among the different controllers based on railway dynamics, reference [86] reported that feedback controllers are the most commonly used for controlling the train velocity (see [98,99], for example). Several studies have been conducted on feedback controllers.
A robust cruise control scheduling concept based on sampled data was studied for high-speed trains in [100]. By converting the sampling period into a bounded time-varying delay, the robust sampled data cruise control problem was converted into a stability analysis problem of a time-varying delay system.
The paper [19] developed a proof of concept of VC by introducing a specific operating mode within the train control system ERTMS/ETCS standard specification and defining a coupling control algorithm accounting for time-varying delays affecting the communication links.
The study [101] presented a brief overview of VC concepts in the ERTMS and scenarios of VC by solving the Udwadia–Kalaba (UK) equation.
Moreover, [102] presented a robust control method for a VCTS subject to time-varying and non-linear uncertainties based on the UK equation. A robust controller was designed that can present uniform ultimate boundedness and unbounded state eventual uniform boundedness, which also satisfies the spatial and bidirectional restrictions for the spacing error. Furthermore, they proposed an optimized design scheme for the adjustable parameter of this controller, which minimizes the control cost and comprehensive index of the system performance.
In ref. [103], a train tracking method based on T2T communication was designed for VC to prevent chain collisions when trains in front experience a sudden speed loss.
5.4.3. Consensus-Based Control (CBC)
Consensus or agreement dynamics is a research area at the intersection of systems and graph theory. A central topic of research is the agreement or consensus problem in multi-agent systems, which concerns the processes where a group of interacting agents achieves a common goal (Figure 16).
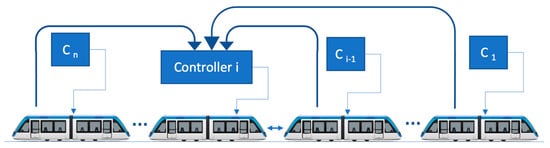
Figure 16.
Consensus-based control.
Consensus-based control (CBC) or cooperative control of multi-agent systems has applications in various areas and involves non-formation cooperative control problems, such as role assignment, automated parallel delivery of payload transports, traffic control, cooperative search, and timing, and formation control problems, such as mobile agents involved in flying unmanned aerial vehicles (UAVs), self-organization of networked mobile networks, autonomous vehicles, and automated highway systems. Reference [104] presented a comparative review of the multi-agent cooperative control consensus. In many studies, CBC has been used for VC.
In ref. [105], a coordinated control method using VC based on a multi-agent system was proposed.
According to an analysis of the characteristics of the approaching and departing operations of a VCTS at a station, ref. [106] developed a novel concept for station operation and an intelligent station dispatching and coordinated control method for the VCTS. The method comprises efficient spatiotemporal path planning for approaching and departing operations at stations, and multi-agent system-based train control.
Reference [107] analyzed the operation organizations and technical characteristics of the multiple formation, variable formation based on physical coupling, and variable formation based on VC.
Reference [108] proposes a blockchain-based virtual coupling of automatic mainline train operation for rail traffic conflicts.
In ref. [109], the cooperative control problem for VC trains with fixed departure and coupling times was investigated. First, three operating modes were proposed to describe the VC departure procedure. Then, it was shown that the trains can obtain reference information from the distributed observers under a connected communication topology and reach the coupled state using the proposed fixed-time tracking controllers.
In ref. [110], a VC-enabled rail transit entity for simulation is represented with the multi-agent technique, including a mathematical formula for the calculation of the train operation cost and passenger travel cost; the degree of passengers’ comfort is also proposed. In addition, the operational principles for flexible and self-organising VC-enabled trains are defined.
Reference [111] proposed a refined VC train-safe distance model and an improved multi-agent information consensus distance control algorithm for VC.
In ref. [112], a distributed cruise control strategy for VC is proposed based on multi-agent system theory by integrating adaptive and cooperative control to address the train formation problem with uncertainties.
Finally, ref. [113] proposed a scheme that includes supervisory control for high-level planning and local motion coordination for low-level implementation. For local coordination, a non-linear and uncertain model was developed, and a constructive method was proposed for designing feedback control.
5.4.4. Sliding Mode Control
Sliding mode control (SMC) is one of the most widely used approaches for controlling non-linear systems [114]. It is a non-linear control technique with remarkable accuracy, robustness, and ease of tuning and implementation. SMC is designed to drive the system states to a particular surface in the state space, which is called the sliding surface. Once the sliding surface was reached, SMC maintains the system state in the vicinity of the sliding surface (Figure 17). However, chattering in SMC causes oscillatory signals with finite frequency and amplitude.
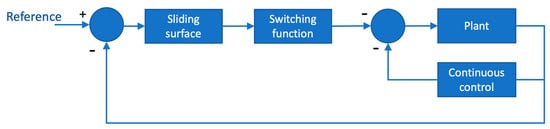
Figure 17.
Sliding mode control.
SMC has also been used in the field of VC with several approaches. First, reference [115] proposed an adaptive finite-time SMC for the cruise control problem for a VCTS with parametric uncertainty and state constraints.
In addition, reference [116] proposed a robust gap SMC based on a non-linear train model having uncertainties and using an algorithm that corrects positional errors caused by not knowing the exact wheel diameter.
Reference [117] proposed a method for maintaining VC using a terminal SMC based on second-order non-linear train dynamics and a non-linear observer to eliminate the estimation error due to time-varying measurement delay.
Finally [118], SMC and fractional calculation are combined to avoid the discontinuous switching phenomenon, in order to suppress the chattering of SMC, and a parameter adaptive law is constructed to approximate the time-varying operating resistance coefficient.
5.4.5. Optimization and Optimal Control
Optimal control is based on mathematical optimization problems, which have three elements: the objective function, decision variables, and a group of constraints. Thus, formulating an optimization problem refers to translating a “real-world” problem into the mathematical equations and variables that represent these three elements. Hence, optimal control controls a dynamical system over a period of time according to the optimization of an objective function.
There are differences among VC literature applications in the literature, which can be categorized into two branches. The first branch focuses on optimization algorithms for VC to solve real-world problems. These problems are typically related to planning issues such as managing departures from and arrivals to the stations [9] or calculating the operational speeds of the trains via DP [18]. The second branch focuses on train control systems that use optimization to set a final control action that determines the final behavior of the train. This branch is discussed in Section 5.4.6, Section 5.4.7 and Section 5.4.8, and the first branch is discussed in the remainder of this section.
In ref. [119], a coupling model was established for two trains approaching from different lines to a junction to increase the coupling maneuver efficiency and simultaneously satisfy the constraints of the optimal train control problem (i.e., speed limits and running resistance according to train characteristics). First, a non-linear discrete model was developed by defining the objective function as the negative coupled time. Then, the non-linear constraints were linearized via piecewise affine approximation and logical variables such that the optimization problem was transformed into a mixed-integer linear programming (MILP) problem.
Similarly, ref. [120] developed a distance-discrete optimal control model, in which the proposed problem is converted into a MILP problem that can be solved using existing solvers, and the DP algorithm was used as the benchmark algorithm in a case study.
In addition, reference [121] proposed an integer optimization model that aims at determining the optimal paths and departure times of variable composition trains in an urban railway network. The algorithm also estimates the optimal time-variant capacity along the path of each origin–destination pair according to the transport demand and, in particular, minimizing the necessity for passengers to change trains to reach their destinations. In a previous work [122], they also proposed an optimization model for a passenger railway line, but with the aim of deciding the optimal time-variant capacity of trains that satisfies transport demand and avoids trains with unnecessary capacity. Similarly, in [123], they proposed a global sensitivity analysis for evaluating the effects of uncertainties in the input data of the VCTS.
The paper [124] investigated the cooperative train control problem under VC with consideration of the impact of stochastic initial delays and proposed MILP-based models for estimating the delay impact, detecting coupled running sections, and optimizing cooperative train trajectories. Moreover, reference [125] proposed an optimal control method based on the linear quadratic Gaussian (LQG) controller. The convoy formation maneuver control is formulated as an optimal trajectory-tracking problem with the capacity of minimizing the effects of noise and system disturbances. An MPC-based reference trajectory generator was designed and an LQG-based trajectory tracker control was proposed, which combines a linear quadratic regulator and a Kalman filter to improve the robustness of the formation algorithm.
References [126,127] developed optimal operation control strategies for virtually coupled trains at junctions, formulating a cooperative game-based model for the coupling maneuver as an optimization problem that is solved via an improved particle swarm optimization (PSO) algorithm. Furthermore, reference [128] proposed an alternative PSO algorithm for predicting the train track and future train operation state to fulfill safe operation. The developed VC train–track prediction algorithm is based on long short-term memory (LSTM) and an unscented Kalman filter. Similarly, an optimization algorithm based on the continuation method and generalized minimum residual method was proposed in [58] for dealing with the non-linearities of the controller.
Finally, reference [129] proposed a general modeling method based on topological manifolds to describe the protection logic for VCTS. Furthermore, reference [130] proposed a calculation model for station spacing to minimize the passenger travel time for increasing the station spacing and passenger transport efficiency.
5.4.6. Model Predictive Control
Another option is to use model predictive control (MPC) [131,132]. MPC is an optimal control method that manages a system under a previously defined set of constraints. As an optimization problem, MPC comprises three key elements: the cost function, the constraints, and decision variables. The cost function comprises the control criteria and objective values. Thus, the control law is obtained by optimizing the cost function, subject to a set of constraints, by adjusting the decision variables. It has the advantage of being simple to formulate because its dynamics and constraints reproduce the real physical behavior. However, its main advantage is that it optimizes the current sampling time by considering future sampling times (Figure 18). This feature ensures that MPC anticipates future events by calculating the required control actions in advance.
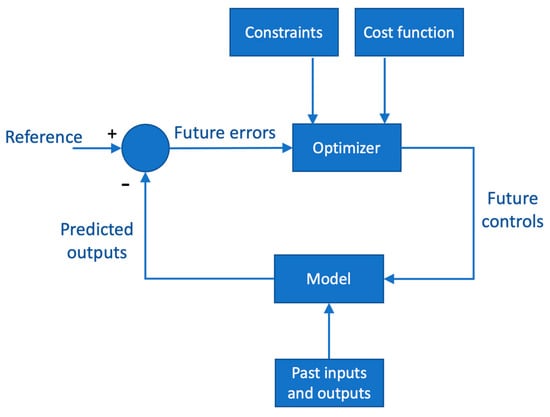
Figure 18.
Model predictive control.
Owing to its predictive capability, MPC has been extensively used in the platooning of autonomous vehicles [60,61,63,133]. All these studies focused on platoon stability and safety, and their results have provided the basis for most of the research on VC.
Specifically in the field of rail traffic control and rail traffic operations, MPC also has several interesting applications, whose results can be applied to VC, although these interesting applications are not directly applied to VC. Reference [134] proposed an automatic rescheduling algorithm for the real-time control of railway traffic. The real-time control is based on an MPC scheme where the rescheduling problem is solved by mixed integer linear programming using macroscopic and mesoscopic models. In a similar way, ref. [135] proposed a control strategy, called integrated model predictive control, that combines both timetable rescheduling and backup trains allocation.
In the field of railway control and VC, MPC was the most widely used control technique in the studies reviewed [18,45,49,50,51,52,53,55,58,68,136,137,138,139,140,141,142,143]. Hereinafter, the main contributions of these papers are introduced.
However, the reliability of prediction and control actions depends on the accuracy of the control model. If a control model is closer to reality, the predictions are more accurate; however, the controller formulation is more complex, which can lead to worse computational performance. Therefore, two accepted approaches are typically used to address these formulation errors [144].
In the first approach, a nominal MPC that does not reflect the possible errors that can be committed is considered. Subsequently, the behavior of the nominal MPC under these errors is studied in a robustness analysis. If the behavior is still acceptable, the inaccuracies can be neglected, and the nominal MPC is acceptable. These concepts have been investigated in depth in a theoretical framework in references [131,144,145,146,147].
The second approach is to design a robust MPC that considers the possible errors within its formulation. When this methodology is used, a robust MPC is ‘synthesized’. This approach is typically used when a high accuracy is required or when an error or disturbance has a significant effect on the behavior of the controller. High-speed applications introduce hard real-time restrictions on the solution of MPC problems, which generally prevents the online computation of the optimal control input. Consequently, most MPC implementations compromise the feasibility and stability guarantees to achieve a real-time solving algorithm. Reference [145] developed a real-time MPC approach for linear systems that provides guarantees for arbitrary time constraints, allowing a tradeoff to be achieved between computational time and performance. Similarly, reference [147] presented a robust constrained control method for linear systems with parametric uncertainty and additive disturbance, in which the stability guarantees performance and a conservatism reduction is achieved via introducing a computationally tractable and mathematically rigorous framework for stabilizing MPC based on an online parameter estimation.
Regarding nominal MPC, ref. [49] designed a distributed nominal MPC method for a VCTS of up to two high-speed trains and evaluated its feasibility and control stability conditions.
Similarly, ref. [20] presented an analytical optimal control approach for virtually coupled high-speed trains with local and string stability.
Furthermore, ref. [18] formulated a nominal MPC method for metro line applications. In addition, refs. [52,141] applied nominal MPC to metro systems.
Moreover, nominal MPC has recently been used in VC in [17,20,53,138,139].
In ref. [148], a VC train formation control method based on an MPC framework is proposed, where the safety and reliability of the system are calculated through a fault tree and the method of constructing reliability function.
Reference [149] investigated the overspeed protection mechanism by focusing on two key problems: speed limit calculation and control for the safe protection of the trains in the convoy when overspeed occurs. This paper described speed limit difference calculation methods based on relative coordinates and proposed a collision mitigation approach using relative kinetic energy minimization. The performance of the MPC-based approach was compared with that of two other control strategies: basic adaptive cruise control (ACC) and direct maximum braking control.
In ref. [150], a method based on state transition is proposed. This method combines partial speed profile calculation with MPC considering position and speed information.
Finally, reference [68] proposed a control framework based on distributed MPC.
5.4.7. Robust Model Predictive Control
Robust MPC (or RMPC) is a type of MPC that can deal with disturbances and uncertainties that are not considered in the MPC formulation and simultaneously satisfy the optimization constraints. There are different approaches for formulating RMPC, the most common of which are presented below.
The min–max MPC is based on min–max optimization problems, in which the cost function is minimized in the worst-case scenario. To set this worst-case scenario, the objective function is first maximized over all possible values of the bounded disturbance. Thus, the optimization considers all possible values of the disturbance, which is why min–max MPC typically has a high computational cost. An example of this implementation was presented in [133], and examples related to VC were presented in [45,55].
The multi-stage MPC [151] is based on a scenario-tree formulation that considers the possible evolution of the system under a disturbance given a measured state. However, the size of the problem increases exponentially with increases in the prediction horizon and the number of uncertainties.
Constraint-tightening MPC is based on reducing the constraint bounds such that the results are acceptable under any possible evolution of a bounded disturbance [152].
Finally, tube MPC reduces the computational cost of robust MPC by using nominal MPC with a feedback controller that aims to ensure that the control states remain inside a robust control invariant set. This set contains all the acceptable states that can be introduced by the disturbance. Although tube MPC can be implemented on its own [50], it has been combined with multi-stage MPC to achieve a compromise between simplicity and optimality [153].
There are other approaches for robust control besides MPC. For example, ref. [154] developed a robust feedback controller based on a cooperative control framework for moving block that modeled the train as a negative imaginary system.
However, RMPC is the most common approach for robust control in VC. Thus, [51] used RMPC with a Markov chain to model a communication-switching topology. In addition, [19] proposed a control algorithm based on the communication topology framework. However, in this case, the robust control of the ERTMS/ETCS signaling system considers possible V2I/I2V communication delays as part of its control strategy. Furthermore, [115] proposed a robust controller accompanied by a position-correction algorithm for better control of the merging and separation maneuvers necessary to form and break VC.
More recently, ref. [50] used tube MPC to deal with communication delays, and [55] proposed a RMPC method that introduces uncertain variables in the acceleration equation of the dynamic model and in the distance-between-trains estimation owing to TP errors in metro lines.
Moreover, ref. [102] developed a RMPC method based on non-linear and time-varying uncertainties. A robust controller with adjustable parameters based on spatial constraints, unbounded states with eventual uniform boundedness and uniform ultimate boundedness, and bidirectional restriction for the spacing error was designed.
Reference [45] developed a min–max robust MPC method. The bounds consider resistive modeling errors, TP, communication delays, and possible adhesion loss. In simulations, the behavior of the RMPC under different perturbations and communication delays was analyzed. The results indicated that the robust MPC method ensures safer operation than nominal MPC in subways, conventional lines, and high-speed lines.
5.4.8. Stochastic Control
Stochastic control is an alternative to robust control, which may be overly conservative. It is based on optimal control problems and probabilities and is a less conservative method that deals with uncertainties while seeking a tradeoff between safety and control performance. Most often, stochastic control is used in cases where the environmental behavior is understood at design time but subject to significant uncertainties at real-time application, for example, in the parameters of the mathematical model (Figure 19).
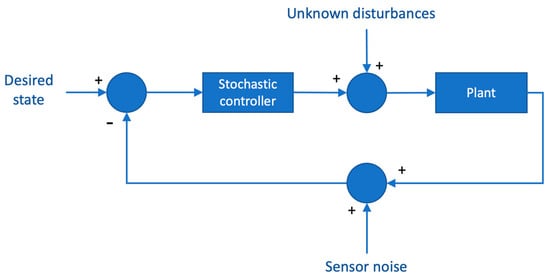
Figure 19.
Stochastic control.
The most common stochastic controllers are based on optimal control problems, in which an objective function is minimized or maximized by addressing random uncertainties. This probabilistic framework for MPC is known as stochastic model predictive control (SMPC), and random uncertainties are introduced through chance constraints that evaluate the probability of state constraint violations. Reference [155] presented an overview of the key concepts of SMPC.
Moreover, reference [156] investigated a safety algorithm for linear systems with additive bounded uncertainty based on stochastic MPC with polytopic constraints that accepts the use of the optimistic control inputs of stochastic MPC, as long as a safe backup planner can ensure safety with regard to satisfying hard constraints.
In addition, the paper [157] reviewed MPC methods using active uncertainty learning. Considering systems with stochastic uncertainty, this paper presents the SMPC problem in the dual-control paradigm, where the control inputs to an uncertain system have a probing effect for active uncertainty learning and a directing effect for controlling the system.
Moreover, ref. [158] proposed a two-stage stochastic control method called multi-forecast model predictive control (MF-MPC). MF-MPC calculates a set of possible control actions for a given prediction horizon and set of forecasted scenarios, which are constrained to a common first control action. Their results indicated that even without convergence, the obtained policy improved the MPC.
Numerous applications of SMPC in the railway sector have been reported [143], [159]. In particular, ref. [160] presented a delay-dependent robust H∞ control criterion for the velocity tracking control of high-speed trains. A dynamic model of high-speed trains was developed by considering the non-linearity of aerodynamic drag, train mass uncertainties, the couplers’ stiffness and resistance, random measuring signals, multiple time-varying state delays, and input delays originated by the transmission process.
To satisfy the safety requirements of railway transport at short distances, the paper [161] proposed a close-proximity driving train movement authority system that permits the implementation of T2T distance measurement and movement authority generation for trains that are close to each other. Stochastic Petri nets were used to evaluate the system availability.
5.4.9. Intelligent Control
Intelligent control, which is sometimes called learning control, refers to a control technique that uses AI computing approaches such us fuzzy logic, Bayesian probability, neural networks, machine learning (ML), reinforcement learning (RL), evolutionary computation, and genetic algorithms. In this control technique, the controller retains information regarding the operation of the system and uses it to modify its control configuration (as shown in Figure 20). Furthermore, these control systems can integrate planning because future control actions can be selected in advance.
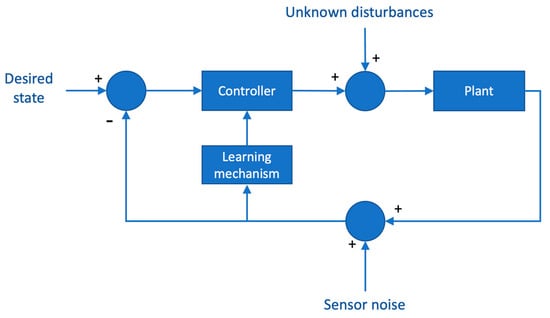
Figure 20.
Intelligent control.
In the field of AI and ML and their relation to MPC, three types of intelligent controllers can be differentiated [162].
First, the learning MPC (LMPC) approach combines MPC and ML techniques to provide a simple and systematic strategy to improve the control design using data. This approach can be used for repetitive tasks where the reference trajectory is not known. Related papers include [163,164,165,166,167,168,169,170].
Second, the adaptive MPC (AMPC) approach focuses on learning and improving the uncertain model of a dynamical system to enhance the controller performance. System input–output data are systematically used to calculate the bounds of the model uncertainties, which are adapted over time as more data are gathered and analyzed. This framework is based on a conventional model-driven approach for control synthesis and system identification. Several studies on this topic have been performed in [171,172].
Third, the concepts of LMPC and AMPC are synthesized in an Adaptive Learning MPC (ALMPC) framework, which allows for robust constraint satisfaction under bounded uncertainties with an enhanced performance. The AMPC framework simultaneously learns and improves its knowledge of the uncertainties present in the system, whereas the LMPC framework ensures iterative performance improvement. Details and numerical examples of this algorithm were presented in [162].
In the field of railways, the paper [173] focused on the high-speed train cooperative operation problem, and the reference [174] focused on passenger comfort, presenting a speed curve optimization method based on an improved RL algorithm.
In the field of VC, several studies have been performed, which are presented below. Reinforcement learning, deep learning, and fuzzy logic were used to control the train, estimate missing information, and model the train dynamics. In [175], a characteristic model of multiple high-speed trains following operation was developed to accurately formulate control constraints for the coupling relationship among adjacent train operation states. Subsequently, a cooperative MPC with a multi-objective rolling optimization scheme was developed.
The paper [137] presented an approach for deep learning-based MPC for the operations of following trains in VC. The proposed method involves an optimal controller and an LSTM neural network, which is used to predict the control objectives of the operation status of the preceding train. The proposed approach was compared with conventional MPC using a case study involving a metro line.
Reference [176] proposed a control approach for Industrial Internet of Things (IIoT)-based VCTS. RL was used to obtain an optimal policy for the VCTS and the conventional APF was used to develop the reward function. Thus, RL improves the search for the global optimal policy, whereas the APF helps RL reduce the computational complexity.
Moreover, a tracking control scheme was developed for a convoy of two virtually coupled trains under a framework of prescribed performance control in [177]. To address system uncertainties, a fuzzy-logic system was used for approximating the unknown resistance.
In addition, reference [178] proposed an intelligent formation operation mode, in which the operation mode of the vehicle is defined in the control system architecture of a straddle-type rapid transit system.
The paper [179] used systems modeling language (SysML) to model the exchange of information in a typical coupling maneuver scenario and then used colored Petri nets for formal modeling and verification. Its aim is to provide a theoretical basis for the design and implementation of the marshaling function for VCTS.
The paper [180] presented a two-level optimization model to optimize the train operation plan with full-length and short-turn routes of virtually coupled trains. The upper model minimizes the enterprise operation cost and passenger travel time, whereas the lower model is used to optimize the equilibrium of the train load rate on short-turn routes. A genetic algorithm was developed to solve the model.
Reference [181] used the system theoretic process analysis (STPA) method to develop a train control system based on VC, and potential hazards that were not easily detected by conventional safety analysis methods were found.
The paper [182] presented a cooperative collision-avoidance control framework based on the Relative Distance Braking Mode of the train ahead for train collision-avoidance control. To reduce the train-following distance, the cooperative control model was formulated as a Markov decision process with a Deep-Q-Network (DQN) algorithm that allows efficient solving of the control problem thanks to its ability to learn the safe and efficient control strategy for the following train.
The paper [183] discussed the effects of denial-of-service (DoS) attacks on the performance of the IIoT-based VCTS by combining the cyber layer with the physical layer and examined the requirements of an attacker. A novel train status estimation approach to compensate for the loss of information about the train ahead via the tradeoff between the VCTS punctuality and the protection against the DoS attack was proposed.
The paper [184] proposed a non-supervised actor–critic deep deterministic policy gradient-based controller that individually controls each train within the convoy to track the reference behavior imposed by the radio block center, while maintaining the desired intertrain distance with respect to the train ahead.
In summary, intelligence control is currently a subject of intensive research.
5.4.10. Critical Comparisons of VC Control Techniques
If we analyze each of the different control methods identified in the analyzed references, it is possible to compare the advantages and disadvantages of each of them.
First, vehicle-following methods are suitable for assessing the dynamics of the capacity, headway, and safety margin and have been used to analyze stability. However, they have limitations because they are not suitable for rule-based control strategies and cannot handle optimization constraints.
Feedback controllers are simpler to deploy than other methods, but they are not appropriate for fulfilling multiple objectives, in contrast to optimal and predictive controllers. They are also not able to handle constraints.
Regarding the CBC, its main advantage is that it explicitly takes into account the T2T communication topologies used in the VC. In addition, unlike other applications such as unmanned aerial vehicles, CBC is quite simple in the case of VC, with far fewer agents. However, the main disadvantage of CBC is that it has limited constraint handling capabilities, which is fundamental in VC.
SMC for VC applications has been reported to have small tracking errors and good performance while handling uncertainties. However, the robustness of SMC also becomes unverifiable when chattering mitigations are applied. Without the chattering mitigations, the system will constantly fluctuate around the equilibrium and become unstable.
Optimization techniques such as dynamic programming or mixed-integer linear programming are useful for certain planning applications such as traffic management or the calculation of train operating speeds. These techniques are used as stand-alone analyses, independent of control methods, or as support for control algorithms. In addition, there are publications that use classical optimal control approaches, but these techniques have been outperformed by more powerful techniques such as MPC or SMC.
In relation to MPC, its main advantage is that it provides a great capacity to handle constraints. These constraints can be useful for the development of realistic models of the system and for the improvement of the applicability of the final controller. Furthermore, by using cost functions, multi-objective optimizations are possible with MPC. In addition, the predictive capability of the MPC is also an advantage. However, MPC has the disadvantage of high computational cost, as it requires multi-stage predictions and an optimization process for each prediction. Moreover, the optimization process also has high computational cost.
Between the two possible approaches to MPC, nominal and robust, the former has the advantage of lower computational cost compared to the latter. However, the robust approach provides greater security conditions for implementation in on-board equipment.
Stochastic control is an interesting alternative as it is less conservative than robust control. However, this advantage is currently an issue because it is not sufficiently developed and tested in real environments where safety must be guaranteed.
Finally, with regard to intelligent control, in the case of ML-based controllers, it is argued that their performance is highly dependent on the training process. In addition, there are some unpredictable situations that cannot be fully covered by the training process. Moreover, VC is still an emerging technology, which means that the training data that can be used to develop controllers are very limited.
Further, the stability and performance of the system cannot be studied theoretically in ML-based controllers because the controller structure does not reflect the real system. It is understandable that there are concerns about the use of ML-based models for safety-critical control systems.
In conclusion, all the used techniques have their advantages and disadvantages. However, in the opinion of the authors, the most promising control technique is the MPC because of its great power and ease of formulation. However, the authors do not propose an MPC as it has been used so far, but rather a combination of several methodologies, combining robust MPC with other concepts such as adaptive, learning, or stochastic approaches.
5.5. Communication Solutions
This section focuses on the identification of VC communication requirements and the state of the art and appropriate technical solutions for VC communications.
Several solutions have been proposed in industry and academia to solve the direct V2V communication problem. It was found [8] that there is consistency in the group of themes for the communication criteria to be applied to the functional requirements of VC, that is, the setup, communication type, latency, symmetry, distribution, bandwidth, link reliability and availability, and travel speed. The non-functional requirements include the backward compatibility, upgradability, maintainability, longevity, return on investment, network security risk, installability, and equipment reliability, which is mainly studied using the mean time between failures.
The publication [185] described mainline railway communication systems—particularly the train communication network, as defined in IEC 61375. The Global System for Mobile Communications for Railways (GSM-R) has proven to be effective in the railway sector. Mobile communications are now emerging dominated by 3rd Generation Partnership Project (3GPP) specifications and 5G is seen as the natural successor to GSM-R under the FRMCS concept. The inclusion of sidelink capability—mainly for automotive applications—is closely aligned with the VC requirements, whereas its conventional network connectivity via base stations is well suited to the longer distances involved in railway transportation compared with road transportation.
A survey article was presented in [186], which explained both the opportunities and challenges that the railway sector must address to fully exploit the latest radio technologies. Although VC was also mentioned, this study focused on CBTC and the ERTMS. In addition, reference [187] presented a comprehensive summary and analysis of off-network use cases in the FRMCS.
Reference [188] described the current wireless technologies used in the railway domain and suggested directions for future wireless systems. They also reviewed channel measurements and models for wireless propagation, and they investigated their suitability for railway environments. Moreover, the first measurement results of a novel approach for T2T communication were presented in [189]. In this study, an Intelligent Transport System (ITS-G5) communication link was used to investigate the effects of the railway environment on a system based on the Car-to-Car (C2C) communication standard.
Furthermore, the study [190] presented the first measurement results of the use of the ITS-G5 technology for smart coupling of the convoy. Reference [191] discussed the use and performance of the IEEE 802.11p standard for T2T communications and C2C communications. The reference [192] presented a brief description of the design of the channel sounder and presented a channel measurement campaign in four specific scenarios with different setups and channel parameters.
Further insights into T2T signal propagation were provided in [193]. The authors described an extensive channel sounding measurement campaign involving two high-speed trains, focusing on broadband propagation for T2T scenarios.
Reference [194] presented a Bayesian estimation algorithm that jointly estimates absolute and relative train positions and velocities based on GNSS pseudorange measurements and track map information for increased positioning performance.
In ref. [195], a study was developed about different modulation and coding schemes and two antenna concepts for wireless communication at 2.4 GHz for future railway applications. In particular, the VC of two-rail vehicles is a major challenge for the railway industry with regard to communication technology.
The paper [196] analyzed functional communication requirements for VCTS using a bottom-up approach. Three different VCTS configurations in terms of sensor and communication concepts were presented, and quantitative examples of communication requirements were given for different application scenarios.
The paper [197] presented a mobile and highly flexible test platform for developing and validating Global Navigation Satellite System (GNSS) applications for VC.
The paper [198] proposed a Petri net method to develop and evaluate train-centric communication-based systems. Possible solutions for these communication systems were also illustrated in the implementation process.
Reference [199] proposed the architecture of a T2T communication framework with three different modems applied to ensure that the system can fulfil the communication task in different scenarios.
In addition, ref. [200] performed a model-based dependability analysis of a wireless communication system used in VC operation.
In the paper [201], an event triggered control approach was designed to mitigate jamming attack effects on VCTS via developing a stability range for VCTS formation and shortening the communication cycle of CBTC systems. The designed cooperative control method can ensure a stable headway between adjacent trains and increase the transportation efficiency.
An MPC was presented in [202], whose aim was to synthesize and optimize a wideband reflector antenna with cosecant squared and flat-topped radiation patterns. The proposed system was a doubly curved reflector antenna characterized by a non-linear dynamic equation. Additionally, this study also investigated the design and optimization of a double-ridged horn reflector antenna operating within the frequency range of 8–18 GHz.
Finally, the work [203] proposed an approach for dynamic information exchange between trains. They combine a long-range distance sensor, an IoT edge hardware platform, and a fuzzy clustering approach to support VC maneuvers. Their combination for the distance detection of the object of interest allows highly accurate results to be obtained for supporting the intended VC maneuvers.
6. Future Research
The railway industry is constantly evolving, and efficient implementation of signaling technologies can substantially increase the network capacity and operational efficiency. VC enhances moving block signaling by reducing train separation through T2T communication and cooperative train control in the VCTS. The implementation of VC faces technological challenges, as well as safety, operational, and infrastructure issues.
The studies reported in [40,41,42] included a roadmap development for the deployment of VC in railway signaling and a hybrid Delphi–AHP multi-criteria analysis (MCA) of moving block and VC railway signaling, with the aim of investigating the overall impact of VC and identifying development strategies to address the forecasted growth in railway demand. An MCA was introduced to analyze and compare VC and moving block with regard to relevant qualitative (e.g., regulatory approval and safety) and quantitative (e.g., stability, capacity, cost, and energy) criteria.
In addition, they identified the gaps that needed to be filled for the main operational and technical railway system components. In particular, safety, interlocking, communication, and control technologies were emphasized, including platoon planning, integrated railway traffic management, and communication structures.
In addition, potential changes in engineering and operational rules were identified, given that multiple trains can be virtually coupled/decoupled by means of the V2V communication and that the protocols for traffic management and T2I communication can be modified.
From a technological perspective, the main challenges of VC are related to aspects such as interlocking, safety, cooperative train protection, V2V communication, communication technology, control technology, and integrated traffic management.
In the context of VC control technology, the main future issues can be identified with regard to various aspects.
First, more complete dynamic models are required for this purpose. To date, most researchers have used models based on the point-mass model. However, models where compositions with coupled units are considered, which may correspond to goods whose lengths can oscillate dynamically owing to couplings, or more complex models where rotating elements are considered, will undoubtedly provide more accurate dynamics. The use of these more complex models implies a higher computational cost; therefore, distributed computing may need to be used for the development of controllers.
Second, railway dynamics are affected by a multitude of uncertainties and disturbances. This implies the development of optimized robust control methods that can consider aspects such as resistance forces, wheel–rail adhesion uncertainties, brake friction variations, system response delays, and significant variations in train masses or track data. Therefore, new control systems based on robust stochastic control should yield to better results than classical robust control systems, which are far more restrictive and time consuming.
MPC has been identified as the most widely used control technique and the one most likely to be used in the future, not only because of the power of its formulation, but also because of its adaptability to future needs in the field, such as stochastic, adaptive, and learning control.
Another interesting alternative could be the use of active controllers, which are already used in other fields, such as intelligent structures that can adaptively adjust their behavior in response to dynamic loads. In this sense, [204] analyzes research trends in control algorithms, such as multi-paradigm strategies with neural network techniques.
Another aspect is the need for real-time controllers, which is essential for real-world VC operations. Parallel computing can be challenging to analyze.
Reference [87] reviewed the existing research on the control of train maneuvers. They reported that the existing research on VC mainly focuses on the operation of trains in sections and that few studies included complex operation scenarios, such as trains from different tracks coupling into the same track to form a VCTS or decoupling at the junction.
Additionally, as VC is a communication-based system, the challenges in this area include high-latency communication, reliable and secure communication, and the development of controllers that are secure and robust against communication failures and communication attacks.
Authors in [87] agreed that T2T communication is essential VC and that it should be combined with an ATO system to analyze the control requirements under different communication conditions in actual operation.
VC control and operation under different communication topologies and/or optimal communication topologies have not been adequately studied. Therefore, it is necessary to study different communication topologies in normal and degraded situations. However, there is no clear preference for one of these architectures over the other, and currently, their use in virtual coupling is the subject of active research, although the advantages and disadvantages of centralized and decentralized control have been successfully studied in other research fields, such as [205,206].
However, with regard to communication, cybersecurity seems to be a future key aspect to be developed. Reference [207] presented a systematic review and outlined emerging trends and approaches in cybersecurity. Possible solutions were identified by consulting the literature, academia, and industry for future directions. The results indicated that most of the studies on cybersecurity in the railway sector are conceptual and that they lack the application of AI-based security, so undoubtedly, cybersecurity will be an aspect of future development.
Consequently, topics related to AI will be subjects of future research. In the opinion of the authors, concepts such as intelligent control, RL, and Big Data analytics, will be topics of major development in the future—mainly oriented toward the autonomous and intelligent driving of railway vehicles and the maneuvers and operations of VC, applied both to normal operating conditions and to degraded situations where it is necessary to preserve the safety of transport.
Reference [208] outlined the role of AI in future railways, summarizing the current AI research related to rail transport. This study indicated that there was little or no research on the use of AI for rail transport policy and revenue management and that AI research for railways is mostly at an early stage.
In addition, reference [209] investigated the main challenges for RL and its applications to the deployment of VC in railways and its feasibility, discussing performance issues and technical implementation. A qualitative analysis based on a deep deterministic policy gradient control algorithm was proposed to provide the first insight into the development of a technological roadmap that could lead to the deployment of AI applications for improving automation and railway safety.
Thus, RL methods may outperform conventional model-based approaches—particularly in complex and uncertain scenarios. Because the railway environment contains many factors and uncertainties that can affect the railway performance, RL techniques may be preferable to conventional model-based control algorithms, as they may be able to adapt the control commands in real time, considering actual events and uncertainties and without prior knowledge of the railway. To the best of our knowledge, no AI solutions for railway VC control strategies have been proposed.
7. Conclusions
More than 200 papers were reviewed and analyzed, taking the first step toward the implementation of VC in the railway of the future by outlining the main topics of current railway-related VC research and presenting our perspective on future research in this field. Thus, we hope this study will help industry, academia, and society to understand the state of the art of and future perspectives in VC research.
It was found that research in industry has focused on the feasibility of VC implementation and operation, whereas research in academia, which is coordinated with industry, has focused on control and communication systems.
Several international research and development projects have been conducted in the field of VC, mainly focusing on evaluating the feasibility of VC and establishing a general framework for its deployment.
Various studies on the implementation of VC in train operation and traffic management were analyzed, several of which focused on the market potential and preliminary operational scenarios of VC and presented the results of an extensive stakeholder survey in the European railway industry, in which expert opinions on the potential and challenges of VC were gathered.
From a technological perspective, several aspects that are necessary for the design of a VC system were analyzed. These aspects include issues related to the control communication topology, dynamic model to support the control algorithms, control methods considered in VC, and sensors and communication systems used.
In the field of control communication topology, decentralized architectures are used in most studies, although centralized architectures are also used. However, in general terms, multi-vehicle distributed architectures are not considered, which can resolve the drawbacks of decentralized V2V communication and high requirements of the centralized ones.
In the field of dynamic models, most researchers have used models based on the point-mass model, and more complete dynamic models are required. The use of these more complex models implies a higher computational load; therefore, distributed computing may need to be used for the development of controllers.
MPC was identified as the most widely used control technique and the one most likely to be used in the future, not only because of the power of its formulation but also because of its adaptability to future needs in the field, such as stochastic, adaptive, and learning control.
In the field of communications, the challenges include high-latency communication, reliable and secure communication, and the development of controllers that are secure and robust against communication failures and communication attacks.
Finally, there are two topics that are largely in their incipient stages in the VC framework and that will be key in the near future: (1) cybersecurity and (2) AI, including intelligent control, RL, and Big Data analytics.
In addition, there are also barriers, threats and problems that can be presented in the VC deployment. Reference [43] provided a good approach of problems and opportunities of VC in railways. In any case, the authors consider that VC is likely to be the technology of choice for future train control systems.
Author Contributions
Conceptualization, J.F. and M.A.V.-S.; methodology, J.F. and M.A.V.-S.; formal analysis, J.F. and M.A.V.-S.; investigation, J.F. and M.A.V.-S.; writing—original draft preparation, J.F. and M.A.V.-S.; writing—review and editing, J.F. and M.A.V.-S.; supervision, J.F. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by Spanish Science and Innovation Ministry—State Research Agency under the project Smart—RVC, Grant: PID2021-124761OB-I00.
Data Availability Statement
The data presented in this study, used for Scopus statistics and VOSviewer maps, are openly available in Zenodo at https://doi.org/10.5281/zenodo.7881698.
Acknowledgments
The authors would also like to thank the staff of the UPM Scientific Portal, Rafael Avila, and especially Gema Esteban and Matilde Sanz, of the ETSII UPM Library, for their support in the management and bibliometric analysis used in this article.
Conflicts of Interest
The authors declare no conflict of interest.
References
- EU Transport in Figures: Statistical Pocketbook; European Commission: Luxembourg, 2021.
- IEEE. IEEE 1474.1-2004 Standard for Communications-Based Train Control (CBTC). Performance and Functional Requirements. 2004. Available online: https://standards.ieee.org/ieee/1474.1/3552/ (accessed on 20 February 2023).
- Furness, N.; van Houten, H.; Bartholomeus, M.; Arenas, L. ERTMS Level 3: The Game-Changer; IRSE: London, UK, 2017. [Google Scholar]
- Wu, Q.; Ge, X.; Zhu, S.; Cole, C.; Spiryagin, M. Physical coupling and decoupling of railway trains at cruising speeds: Train control and dynamics. Int. J. Rail Transp. 2023, 1–16. [Google Scholar] [CrossRef]
- Nold, M.; Corman, F. Dynamic train unit coupling and decoupling at cruising speed: Systematic classification, operational potentials, and research agenda. J. Rail Transp. Plan. Manag. 2021, 18, 100241. [Google Scholar] [CrossRef]
- Nold, M. Coupling assistance device for coupling and uncoupling rail vehicles during travel. German Patent DE102018009589B3, 2019. [Google Scholar]
- Quaglietta, E.; Wang, M.; Goverde, R. A multi-state train-following model for the analysis of virtual coupling railway operations. J. Rail Transp. Plan. Manag. 2020, 15, 100195. [Google Scholar] [CrossRef]
- X2Rail-3. Advanced Signalling, Automation and Communication System (IP2 and IP5)—Prototyping the Future by Means of Capacity Increase, Autonomy and Flexible Communication. Cordis Database. Available online: https://cordis.europa.eu/project/id/826141 (accessed on 7 October 2022).
- Schumann, T. Increase of capacity on the shinkansen high-speed line using virtual coupling. Int. J. Transp. Dev. Integr. 2017, 1, 666–676. [Google Scholar] [CrossRef]
- Quaglietta, E.; Spartalis, P.; Wang, M.; Goverde, R.M.; van Koningsbruggen, P. Modelling and analysis of Virtual Coupling with dynamic safety margin considering risk factors in railway operations. J. Rail Transp. Plan. Manag. 2022, 22, 100313. [Google Scholar] [CrossRef]
- Scopus. Available online: https://www.scopus.com/home.uri (accessed on 24 June 2022).
- WoS, Web Os Science. Available online: https://clarivate.com/products/scientific-and-academic-research/research-discovery-and-workflow-solutions/webofscience-platform/ (accessed on 21 April 2023).
- Google Scholar. Available online: https://scholar.google.es/ (accessed on 21 April 2023).
- ResearchGate. Available online: https://www.researchgate.net/ (accessed on 21 April 2023).
- IEEE Xplore. Available online: https://ieeexplore.ieee.org/Xplore/home.jsp (accessed on 26 April 2023).
- Inciteful. Available online: https://inciteful.xyz/ (accessed on 21 April 2023).
- Cao, Y.; Wen, J.; Ma, L. Tracking and collision avoidance of virtual coupling train control system. Futur. Gener. Comput. Syst. 2021, 120, 76–90. [Google Scholar] [CrossRef]
- Felez, J.; Kim, Y.; Borrelli, F. A model predictive control approach for virtual coupling in railways. IEEE Trans. Intell. Transp. Syst. 2019, 20, 2728–2739. [Google Scholar] [CrossRef]
- Di Meo, C.; Di Vaio, M.; Flammini, F.; Nardone, R.; Santini, S.; Vittorini, V. ERTMS/ETCS virtual coupling: Proof of concept and numerical analysis. IEEE Trans. Intell. Transp. Syst. 2019, 21, 2545–2556. [Google Scholar] [CrossRef]
- Liu, Y.; Zhou, Y.; Su, S.; Xun, J.; Tang, T. An analytical optimal control approach for virtually coupled high-speed trains with local and string stability. Transp. Res. Part C: Emerg. Technol. 2021, 125, 102886. [Google Scholar] [CrossRef]
- Ning, B. Absolute braking and relative distance braking—Train operation control modes in moving block systems. WIT Trans. Built Environ. 1998, 34, 991–1001. [Google Scholar]
- Williams, C. The next ETCS level? In Proceedings of the 2016 IEEE International Conference on Intelligent Rail Transportation (ICIRT), Birmingham, UK, 23–25 August 2016; pp. 75–79. [Google Scholar] [CrossRef]
- Winter, J.; Lehner, A.; Polisky, E. Electronic Coupling of Next Generation Trains. In Proceedings of the Third International Conference on Railway Technology: Research, Development and Maintenance, Cagliari, Italy, 5–8 April 2016. [Google Scholar] [CrossRef]
- Mitchell, I. ERTMS Level 4, Train Convoys or Virtual Coupling. IRSE News. 2016. Available online: https://webinfo.uk/webdocssl/irse-kbase/ref-viewer.aspx?Refno=1882928268&document=ITC%20Report%2039%20Train%20convoys%20and%20virtual%20coupling.pdf (accessed on 7 October 2022).
- Bock, U.; Varchmin, J.U. Enhancement of the Occupancy of Railroads Using Virtually Coupled Train Formations. In Proceedings of the World Congress on Railway Research (WCRR), Tokyo, Japan, 16–20 November 1999. [Google Scholar]
- Bock, U.; Bikker, G. Design and development of a future freight train concept—Virtually coupled train formations. IFAC Proc. Vol. 2000, 33, 395–400. [Google Scholar] [CrossRef]
- Braun, I.; Konig, S.; Schnieder, E. Concepts on a future railway management system. In Proceedings of the 8th World Congress on Intelligent Transport Systems, Sydney, Australia, 30 September–4 October 2001. [Google Scholar]
- Konig, S.; Schnieder, E. Modeling and simulation of an operation concept for future rail traffic. In Proceedings of the 2001 IEEE Intelligent Transportation Systems. Proceedings (Cat. No.01TH8585), Oakland, CA, USA, 25–29 August 2001; pp. 808–812. [Google Scholar] [CrossRef]
- König, S.; Braun, I.; Schnieder, E. Decentralized management and operations control concept for railway freight transport services by multi agent systems. IFAC Proc. Vol. 2003, 36, 317–322. [Google Scholar] [CrossRef]
- Henke, C.; Tichy, M.; Schneider, T.; Böcker, J.; Schäfer, W. Organization and control of autonomous railway convoys. In Proceedings of the 9th International Symposium on Advanced Vehicle Control, Kobe, Japan, 6–9 October 2008. [Google Scholar]
- Ständer, T.; Drewes, J.; Braun, D.-W.I.; Schnieder, D.-I.D.H.E. Operational and safety concepts for railway operation with virtual train-sets. IFAC Proc. Vol. 2006, 39, 261–266. [Google Scholar] [CrossRef]
- Shift2Rail. The Rail Joint Undertaking. 2015. Available online: https://projects.shift2rail.org/ (accessed on 4 January 2023).
- Shift2Rail. Shift2Rail Strategic Master Plan. 2015. Available online: https://rail-research.europa.eu/wp-content/uploads/2016/03/S2R-JU-GB_Decision-N-4-2015-on-the-adoption-of-the-S2R-Master-Plan.pdf (accessed on 4 January 2023).
- Goikoetxea, J. Roadmap towards the wireless virtual coupling of trains. Commun. Technol. Veh. 2016, 3–9. [Google Scholar] [CrossRef]
- Europe’s Rail. Europe’s Rail Join Undertaking. 2023. Available online: https://rail-research.europa.eu/ (accessed on 30 April 2023).
- National Key R&D Program of China. Available online: https://chinainnovationfunding.eu/national-key-rd-programmes/ (accessed on 27 December 2022).
- NSFC. National Natural Science Foundation of China. 2023. Available online: https://www.nsfc.gov.cn/english/site_1/index.html (accessed on 19 January 2023).
- MOVINGRAIL. Moving Block and Virtual Coupling New Generations of RAIL Signalling. 2020. Available online: https://movingrail.eu/ (accessed on 27 December 2022).
- Stickel, S.; Schenker, M.; Dittus, H.; Unterhuber, P.; Canesi, S.; Riquier, V.; Ayuso, F.P.; Berbineau, M.; Goikoetxea, J. Technical feasibility analysis and introduction strategy of the virtually coupled train set concept. Sci. Rep. 2022, 12, 4248. [Google Scholar] [CrossRef] [PubMed]
- Aoun, J.; Quaglietta, E.; Goverde, R.M.P. Investigating market potentials and operational scenarios of virtual coupling railway signaling. Transp. Res. Rec. J. Transp. Res. Board 2020, 2674, 799–812. [Google Scholar] [CrossRef]
- Aoun, J.; Quaglietta, E.; Goverde, R.M.; Scheidt, M.; Blumenfeld, M.; Jack, A.; Redfern, B. A hybrid delphi-AHP multi-criteria analysis of moving block and virtual coupling railway signalling. Transp. Res. Part C Emerg. Technol. 2021, 129, 103250. [Google Scholar] [CrossRef]
- Aoun, J.; Quaglietta, E.; Goverde, R.M. Roadmap development for the deployment of virtual coupling in railway signalling. Technol. Forecast. Soc. Chang. 2023, 189, 122263. [Google Scholar] [CrossRef]
- SCOTT. Secure Connected Trustable Things. 2017. Available online: https://scottproject.eu/domains/rail/ (accessed on 25 January 2023).
- InSecTT. Intelligent Secure Trustable Things. 2021. Available online: https://www.insectt.eu/ (accessed on 30 April 2023).
- Vaquero-Serrano, M.A.; Felez, J. A decentralized robust control approach for virtually coupled train sets. Comput. Civ. Infrastruct. Eng. 2023, 1–20. [Google Scholar] [CrossRef]
- VOSviewer. Available online: https://www.vosviewer.com/features/highlights (accessed on 21 April 2023).
- MOVINGRAIL. Deliverables. 2020. Available online: https://movingrail.eu/public-information/deliverables (accessed on 10 January 2023).
- UIC. FRMCS—Future Railway Mobile Communication System. 2023. Available online: https://uic.org/rail-system/frmcs/ (accessed on 18 January 2023).
- Liu, Y.; Liu, R.; Wei, C.; Xun, J.; Tang, T. Distributed model predictive control strategy for constrained high-speed virtually coupled train set. IEEE Trans. Veh. Technol. 2021, 71, 171–183. [Google Scholar] [CrossRef]
- Liu, Y.; Zhou, Y.; Su, S.; Xun, J.; Tang, T. Control strategy for stable formation of high-speed virtually coupled trains with disturbances and delays. Comput. Civ. Infrastruct. Eng. 2022, 38. [Google Scholar] [CrossRef]
- Zhao, H.; Dai, X.; Zhang, Q.; Ding, J. Robust event-triggered model predictive control for multiple high-speed trains with switching topologies. IEEE Trans. Veh. Technol. 2020, 69, 4700–4710. [Google Scholar] [CrossRef]
- Luo, X.; Tang, T.; Liu, H.; Zhang, L.; Li, K. An adaptive model predictive control system for virtual coupling in metros. Actuators 2021, 10, 178. [Google Scholar] [CrossRef]
- Wu, Z.; Gao, C.; Tang, T. A virtually coupled metro train platoon control approach based on model predictive control. IEEE Access 2021, 9, 56354–56363. [Google Scholar] [CrossRef]
- Chai, S.; Yin, J.; D’ariano, A.; Samà, M.; Tang, T. Scheduling of coupled train platoons for metro networks: A passenger demand-oriented approach. Transp. Res. Rec. J. Transp. Res. Board 2022, 2677, 1671–1689. [Google Scholar] [CrossRef]
- Felez, J.; Vaquero-Serrano, M.A.; Sanz, J.D.D. A robust model predictive control for virtual coupling in train sets. Actuators 2022, 11, 372. [Google Scholar] [CrossRef]
- Zhou, Q.; Zhang, C.; Bao, F.; Zhang, L.; Xiao, X. The safety braking protection model of virtually coupled train platoon in subway. In Proceedings of the 2020 10th Institute of Electrical and Electronics Engineers International Conference on Cyber Technology in Automation, Control, and Intelligent Systems (CYBER), Xi’an, China, 10–14 October 2020; IEEE: Piscataway Township, NJ, USA, 2020; pp. 401–406. [Google Scholar] [CrossRef]
- Borges, R.M.; Quaglietta, E. Assessing hyperloop transport capacity under moving-block and virtual coupling operations. IEEE Trans. Intell. Transp. Syst. 2021, 23, 12612–12621. [Google Scholar] [CrossRef]
- Su, S.; She, J.; Li, K.; Wang, X.; Zhou, Y. A nonlinear safety equilibrium spacing-based model predictive control for virtually coupled train set over gradient terrains. IEEE Trans. Transp. Electrification 2021, 8, 2810–2824. [Google Scholar] [CrossRef]
- Guanetti, J.; Kim, Y.; Borrelli, F. Control of connected and automated vehicles: State of the art and future challenges. Annu. Rev. Control 2018, 45, 18–40. [Google Scholar] [CrossRef]
- Zheng, Y.; Li, S.E.; Li, K.; Borrelli, F.; Hedrick, J.K. Distributed model predictive control for heterogeneous vehicle platoons under unidirectional topologies. IEEE Trans. Control Syst. Technol. 2016, 25, 899–910. [Google Scholar] [CrossRef]
- Turri, V.; Kim, Y.; Guanetti, J.; Johansson, K.H.; Borrelli, F. A model predictive controller for non-cooperative eco-platooning. In Proceedings of the 2017 American Control Conference (ACC), Seattle, WA, USA, 24–26 May 2017; IEEE: Piscataway Township, NJ, USA; pp. 2309–2314. [Google Scholar] [CrossRef]
- Brackstone, M.; McDonald, M. Car-following: A historical review. Transp. Res. Part F Traffic Psychol. Behav. 1999, 2, 181–196. [Google Scholar] [CrossRef]
- Turri, V.; Besselink, B.; Johansson, K.H. Cooperative look-ahead control for fuel-efficient and safe heavy-duty vehicle platooning. IEEE Trans. Control Syst. Technol. 2016, 25, 12–28. [Google Scholar] [CrossRef]
- Li, S.E.; Zheng, Y.; Li, K.; Wang, J. An overview of vehicular platoon control under the four-component framework. IEEE Intell. Veh. Symp. 2015, 286–291. [Google Scholar] [CrossRef]
- Feng, S.; Zhang, Y.; Li, S.E.; Cao, Z.; Liu, H.X.; Li, L. String stability for vehicular platoon control: Definitions and analysis methods. Annu. Rev. Control 2019, 47, 81–97. [Google Scholar] [CrossRef]
- Wang, M.; Daamen, W.; Hoogendoorn, S.P.; van Arem, B. Rolling horizon control framework for driver assistance systems. Part I: Mathematical formulation and non-cooperative systems. Transp. Res. Part C Emerg. Technol. 2014, 40, 271–289. [Google Scholar] [CrossRef]
- Wang, M.; Daamen, W.; Hoogendoorn, S.P.; van Arem, B. Rolling horizon control framework for driver assistance systems. Part II: Cooperative sensing and cooperative control. Transp. Res. Part C Emerg. Technol. 2014, 40, 290–311. [Google Scholar] [CrossRef]
- Yang, Y.; Yan, F. Research on train dynamic coupling strategy based on distributed model predictive control. J. Physics Conf. Ser. 2022, 2183, 12029. [Google Scholar] [CrossRef]
- Bai, W.; Dong, H.; Lu, J.; Li, Y. Event-triggering communication based distributed coordinated control of multiple high-speed trains. IEEE Trans. Veh. Technol. 2021, 70, 8556–8566. [Google Scholar] [CrossRef]
- Chu, K.-C. Decentralized control of high-speed vehicular strings. Transp. Sci. 1974, 8, 361–384. [Google Scholar] [CrossRef]
- Wu, Q.; Spiryagin, M.; Cole, C. Longitudinal train dynamics: An overview. Veh. Syst. Dyn. 2016, 54, 1688–1714. [Google Scholar] [CrossRef]
- Niu, J.; Sui, Y.; Yu, Q.; Cao, X.; Yuan, Y. Aerodynamics of railway train/tunnel system: A review of recent research. Energy Built Environ. 2020, 1, 351–375. [Google Scholar] [CrossRef]
- Guo, Z.; Liu, T.; Hemida, H.; Chen, Z.; Liu, H. Numerical simulation of the aerodynamic characteristics of double unit train. Eng. Appl. Comput. Fluid Mech. 2020, 14, 910–922. [Google Scholar] [CrossRef]
- Gillani, S.A.; Panikulam, V.P.; Sadasivan, S.; Yaoping, Z. CFD analysis of aerodynamic drag effects on vacuum tube trains. J. Appl. Fluid Mech. 2019, 12, 303–309. [Google Scholar] [CrossRef]
- Carrarini, A. Coupled multibody-aerodynamic simulation of high-speed trains manoeuvres. Pamm 2003, 2, 114–115. [Google Scholar] [CrossRef]
- Niu, J.-Q.; Zhou, D.; Liu, T.-H.; Liang, X.-F. Numerical simulation of aerodynamic performance of a couple multiple units high-speed train. Veh. Syst. Dyn. 2017, 55, 681–703. [Google Scholar] [CrossRef]
- Huo, X.; Liu, T.; Chen, Z.; Li, W.; Gao, H.; Wang, S. Comparative analysis of the aerodynamic characteristics on double-unit trains formed by different types of high-speed train. J. Wind. Eng. Ind. Aerodyn. 2021, 217, 104757. [Google Scholar] [CrossRef]
- Guo, Z.-J.; Liu, T.-H.; Chen, Z.-W.; Xie, T.-Z.; Jiang, Z.-H. Comparative numerical analysis of the slipstream caused by single and double unit trains. J. Wind. Eng. Ind. Aerodyn. 2018, 172, 395–408. [Google Scholar] [CrossRef]
- Watkins, S.; Vino, G. The effect of vehicle spacing on the aerodynamics of a representative car shape. J. Wind. Eng. Ind. Aerodyn. 2008, 96, 1232–1239. [Google Scholar] [CrossRef]
- Wilhelmi, H.; Thieme, T.; Henning, A.; Wagner, C. Aerodynamic investigations of the effects of virtual coupling on two next generation trains. In New Results in Numerical and Experimental Fluid Mechanics XI; Springer: Cham, Switzerland, 2017; pp. 695–704. [Google Scholar] [CrossRef]
- Fadhel, S.; Fromont, S. Quantification of the aerodynamic gain on two virtually coupled modular trains. Int. J. Comput. Methods Exp. Meas. 2022, 10, 372–384. [Google Scholar] [CrossRef]
- Wu, Q.; Ge, X.; Han, Q.-L.; Wang, B.; Wu, H.; Cole, C.; Spiryagin, M. Dynamics and control simulation of railway virtual coupling. Veh. Syst. Dyn. 2022, 1–25. [Google Scholar] [CrossRef]
- Wu, Q.; Ge, X.; Cole, C.; Spiryagin, M. Car and train platoon simulations. J. Vib. Control 2022, 107754632211401. [Google Scholar] [CrossRef]
- Wu, Q.; Ge, X.; Cole, C.; Spiryagin, M. A Method for High Fidelity Simulations of Railway Virtual Coupling. In Proceedings of the 2022 Joint Rail Conference, Virtual, Online, 20–21 April 2022. [Google Scholar] [CrossRef]
- Soto, M.G.; Adeli, H. Recent advances in control algorithms for smart structures and machines. Expert Syst. 2017, 34, e12205. [Google Scholar] [CrossRef]
- Yin, J.; Tang, T.; Yang, L.; Xun, J.; Huang, Y.; Gao, Z. Research and development of automatic train operation for railway transportation systems: A survey. Transp. Res. Part C Emerg. Technol. 2017, 85, 548–572. [Google Scholar] [CrossRef]
- Xun, J.; Li, Y.; Liu, R.; Li, Y.; Liu, Y. A survey on control methods for virtual coupling in railway operation. IEEE Open J. Intell. Transp. Syst. 2022, 3, 838–855. [Google Scholar] [CrossRef]
- Wu, Q.; Ge, X.; Han, Q.-L.; Liu, Y. Railway virtual coupling: A survey of emerging control techniques. IEEE Trans. Intell. Veh. 2023, 1–17. [Google Scholar] [CrossRef]
- Ahmed, H.U.; Huang, Y.; Lu, P. A review of car-following models and modeling tools for human and autonomous-ready driving behaviors in micro-simulation. Smart Cities 2021, 4, 314–335. [Google Scholar] [CrossRef]
- Saidi, S.; Koutsopoulos, H.N.; Wilson, N.H.; Zhao, J. Train following model for urban rail transit performance analysis. Transp. Res. Part C Emerg. Technol. 2023, 148, 104037. [Google Scholar] [CrossRef]
- Qianqian, Z.; Hongwei, W. A Multi-train cooperative control method of urban railway transportation based on artificial potential field. In Proceedings of the 2019 Chinese Automation Congress (CAC), Hangzhou, China, 22–24 November 2019; 2019; pp. 1350–1355. [Google Scholar] [CrossRef]
- Cao, Y.; Wen, J.; Hobiny, A.; Li, P.; Wen, T. Parameter-varying artificial potential field control of virtual coupling system with nonlinear dynamics. Fractals 2022, 30, 990. [Google Scholar] [CrossRef]
- Pan, J.; Peng, Q.; Zhan, S.; Bai, J. Multiscenario-based train headway analysis under virtual coupling system. J. Adv. Transp. 2021, 2021, 5642709. [Google Scholar] [CrossRef]
- Su, S.; She, J.; Wang, D.; Gong, S.; Zhou, Y. A stabilized virtual coupling scheme for a train set with heterogeneous braking dynamics capability. Transp. Res. Part C Emerg. Technol. 2023, 146, 103947. [Google Scholar] [CrossRef]
- Szkopiński, J.; Kochan, A. Maximization of energy efficiency by synchronizing the speed of trains on a moving block system. Energies 2023, 16, 1764. [Google Scholar] [CrossRef]
- Cao, Y.; Yang, Y.; Ma, L.; Wen, J. Research on virtual coupled train control method based on GPC & VAPF. Chin. J. Electron. 2022, 31, 897–905. [Google Scholar] [CrossRef]
- Flammini, F.; Marrone, S.; Nardone, R.; Vittorini, V. Compositional modeling of railway Virtual Coupling with Stochastic Activity Networks. Form. Asp. Comput. 2021, 33, 989–1007. [Google Scholar] [CrossRef]
- Havaei, P.; Sandidzadeh, M.A. Intelligent-PID controller design for speed track in automatic train operation system with heuristic algorithms. J. Rail Transp. Plan. Manag. 2022, 22, 100321. [Google Scholar] [CrossRef]
- Pickering, J.E.; Davies, J.; Burnham, K.J. Development of model prototype to investigate closer running autonomous train operation: Seamless interchangeability. In Proceedings of the 2019 23rd International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, 9–11 October 2019; pp. 572–579. [Google Scholar] [CrossRef]
- Li, S.; Yang, L.; Li, K.; Gao, Z. Robust sampled-data cruise control scheduling of high speed train. Transp. Res. Part C Emerg. Technol. 2014, 46, 274–283. [Google Scholar] [CrossRef]
- Wang, B.; Yang, D.; Zhang, X.; Jia, X. Constraint-force driven control design for rail vehicle virtual coupling. J. Vib. Control 2021, 28, 551–563. [Google Scholar] [CrossRef]
- Zhang, X.; Yang, D.; Zhang, W.; Huang, J. Optimal robust constraints-following control for rail vehicle virtual coupling. J. Vib. Control 2022, 29, 1352–1365. [Google Scholar] [CrossRef]
- Qiu, C.; Chen, T.; Lu, S.; Wang, H. A safety-oriented dynamic moving block train control system based on train-to-train communication. IEEE Intell. Transp. Syst. Mag. 2021, 14, 175–187. [Google Scholar] [CrossRef]
- Gulzar, M.M.; Rizvi, S.T.H.; Javed, M.Y.; Munir, U.; Asif, H. Multi-agent cooperative control consensus: A comparative review. Electronics 2018, 7, 22. [Google Scholar] [CrossRef]
- Liu, L.; Wang, P.; Zhang, B.; Wei, W. Coordinated Control Method of Virtually Coupled Train Formation Based on Multi Agent System. In Advances in Smart Vehicular Technology, Transportation, Communication and Applications; VTCA 2018. Smart Innovation, Systems and Technologies; Ni, S., Wu, T.Y., Chang, T.H., Pan, J.S., Jain, L., Eds.; Springer: Cham, Switzerland, 2019; Volume 129. [Google Scholar] [CrossRef]
- Liu, L.; Wang, P.; Wei, W.; Li, Q.; Zhang, B. Intelligent dispatching and coordinated control method at railway stations for virtually coupled train sets. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, L.; Liu, J.; Shi, J. Carrying capacity calculation method of regional rail transit line based on flexible train formation. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Muniandi, G. Blockchain-enabled virtual coupling of automatic train operation fitted mainline trains for railway traffic conflict control. IET Intell. Transp. Syst. 2020, 14, 611–619. [Google Scholar] [CrossRef]
- Zhang, Z.; Song, H.; Wang, H.; Wang, X.; Dong, H. Cooperative multi-scenario departure control for virtual coupling trains: A fixed-time approach. IEEE Trans. Veh. Technol. 2021, 70, 8545–8555. [Google Scholar] [CrossRef]
- Zhang, J. Simulation-based schedule optimization for virtual coupling-enabled rail transit services with multiagent technique. J. Adv. Transp. 2023, 2023, 1–21. [Google Scholar] [CrossRef]
- He, R.; Zhang, Y. Safe distance model and improved consensus control algorithm for virtual coupling of high-speed train. In Proceedings of the Sixth International Conference on Traffic Engineering and Transportation System (ICTETS 2022), Guangzhou, China, 2 February 2023. [Google Scholar] [CrossRef]
- Sun, N.; Zhang, Y. A distributed adaptive cruise control method for virtually coupled train formation. In Proceedings of the Sixth International Conference on Traffic Engineering and Transportation System (ICTETS 2022), Guangzhou, China, 2 February 2023; Zhou, J., Sheng, J., Eds.; SPIE: Bellingham, WA, USA, 2023; p. 87. [Google Scholar] [CrossRef]
- Bauso, D.; Fecarotti, C.; Khaleghi, A. Cooperative control and stability analysis for virtual coupling of rail vehicles. Control Eng. Pract. 2023, 133, 105452. [Google Scholar] [CrossRef]
- Gambhire, S.J.; Kishore, D.R.; Londhe, P.S.; Pawar, S.N. Review of sliding mode based control techniques for control system applications. Int. J. Dyn. Control 2020, 9, 363–378. [Google Scholar] [CrossRef]
- Wang, D.; Cao, Y. Adaptive Finite-Time Sliding Mode Control of Virtually Coupled Train Set with State Constraints. In Proceedings of the 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC), Macau, China, 8–12 October 2022; pp. 1778–1783. [Google Scholar] [CrossRef]
- Park, J.; Lee, B.-H.; Eun, Y. Virtual coupling of railway vehicles: Gap reference for merge and separation, robust control, and position measurement. IEEE Trans. Intell. Transp. Syst. 2020, 23, 1085–1096. [Google Scholar] [CrossRef]
- Liu, Y.; Ou, D.; Yang, Y.; Dong, D. A method for maintaining virtually coupled states of train convoys. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2022, 237, 243–252. [Google Scholar] [CrossRef]
- Lin, J.; Ni, M.; Liang, H. High-speed train cooperative control based on fractional-order sliding mode adaptive algorithm. Railw. Sci. 2023; ahead-of-print. [Google Scholar] [CrossRef]
- Cheng, F.; Su, S.; Tang, T.; Wang, W. Optimization of the coupling operation for train platoon in the junction area. In Proceedings of the 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), Indianapolis, IN, USA, 19–22 September 2021; pp. 2405–2410. [Google Scholar] [CrossRef]
- Chen, F.; Tang, T.; Su, S.; Meng, J. Optimization on the dynamic train coupling process in high-speed railway. Chin. J. Electron. 2023. Available online: https://cje.ejournal.org.cn/article/doi/10.23919/cje.2022.00.189 (accessed on 18 January 2023).
- Gallo, F.; Di Febbraro, A.; Giglio, D.; Sacco, N. Planning and optimization of passenger railway services with virtually coupled trains. In Proceedings of the 2021 7th International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Heraklion, Greece, 16–17 June 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Gallo, F.; Di Febbraro, A.; Giglio, D.; Sacco, N. A mathematical programming model for the management of carriages in virtually coupled trains. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Gallo, F.; Di Febbraro, A.; Giglio, D.; Sacco, N. Global Sensitivity Analysis for the evaluation of the effects of uncertainty of transport demand and passenger behavior on planning railway services with variable train composition. In Proceedings of the 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), Indianapolis, IN, USA, 19–22 September 2021; pp. 2298–2305. [Google Scholar] [CrossRef]
- Wang, P.; Zhu, Y.; Zhu, W. Robust cooperative train trajectory optimization with stochastic delays under virtual coupling. IET Intell. Transp. Syst. 2023. [Google Scholar] [CrossRef]
- Tian, D.; Li, J.; Zhou, J.; Duan, X.; Sheng, Z.; Zhao, D.; Hao, W.; Long, K. A Linear Quadratic Gaussian Optimal Control Approach for Train Platoon Formation. In Proceedings of the 2021 IEEE International Conference on Unmanned Systems (ICUS), Beijing, China, 15–17 October 2021; pp. 116–121. [Google Scholar] [CrossRef]
- Wang, Q.; Chai, M.; Liu, H.; Tang, T. Optimized control of virtual coupling at junctions: A cooperative game-based approach. Actuators 2021, 10, 207. [Google Scholar] [CrossRef]
- Wang, Q.; Chai, M.; Wang, H.; Chen, L.; Lv, J. Train operation strategy optimization of virtual coupling: A cooperative game based approach. In Proceedings of the 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), Indianapolis, IN, USA, 19–22 September 2021; pp. 3933–3938. [Google Scholar] [CrossRef]
- Hu, J.; Zhang, Y. Research on virtual coupling railway safety protection based on track prediction. In Proceedings of the Sixth International Conference on Traffic Engineering and Transportation System (ICTETS 2022), Guangzhou, China, 23–25 September 2022; Zhou, J., Sheng, J., Eds.; SPIE: Bellingham, WA, USA, 2023; p. 5. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, H.; James, P.; Roggenbach, M.; Tian, D. A train protection logic based on topological manifolds for virtual coupling. IEEE Trans. Intell. Transp. Syst. 2021, 23, 11930–11945. [Google Scholar] [CrossRef]
- Wu, Q.; Li, Y.; Dan, P. Optimization of urban rail transit station spacing for minimizing passenger travel time. J. Rail Transp. Plan. Manag. 2022, 22, 100317. [Google Scholar] [CrossRef]
- Borrelli, F.; Bemporad, A.; Morari, M. Predictive Control for Linear and Hybrid Systems, 1st ed.; Cambridge University Press: Cambridge, UK, 2017. [Google Scholar] [CrossRef]
- Mayne, D.Q.; Rawlings, J.B.; Rao, C.V.; Scokaert, P.O.M. Constrained model predictive control: Stability and optimality. Automatica 2000, 36, 789–814. [Google Scholar] [CrossRef]
- Lan, J.; Zhao, D. Min-max model predictive vehicle platooning with communication delay. IEEE Trans. Veh. Technol. 2020, 69, 12570–12584. [Google Scholar] [CrossRef]
- Cavone, G.; van den Boom, T.; Blenkers, L.; Dotoli, M.; Seatzu, C.; De Schutter, B. An MPC-based rescheduling algorithm for disruptions and disturbances in large-scale railway networks. IEEE Trans. Autom. Sci. Eng. 2020, 19, 99–112. [Google Scholar] [CrossRef]
- Tong, Y.; Xu, W.; Dotoli, M.; Cavone, G. An integrated model predictive control method for the rescheduling of metro traffic with backup trains. In Proceedings of the 2022 American Control Conference (ACC), Atlanta, GA, USA, 8–10 June 2022; IEEE: Piscataway Township, NJ, USA, 2022. [Google Scholar] [CrossRef]
- Yang, Y.; Ou, D.; Liu, Y.; Dong, D. Transition Control of Virtual Coupling Train Formation Based on Model Predictive Control. In Proceedings of the 5th International Conference on Electrical Engineering and Information Technologies for Rail Transportation (EITRT) 2021; EITRT 2021. Lecture Notes in Electrical Engineering; Qin, Y., Jia, L., Liang, J., Liu, Z., Diao, L., An, M., Eds.; Springer: Singapore, 2022; Volume 868. [Google Scholar] [CrossRef]
- Su, H.; Chai, M.; Chen, L.; Lv, J. Deep learning-based model predictive control for virtual coupling railways operation. In Proceedings of the 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), Indianapolis, IN, USA, 19–22 September 2021; pp. 3490–3495. [Google Scholar] [CrossRef]
- She, J.; Li, K.; Yuan, L.; Zhou, Y.; Su, S. Cruising control approach for virtually coupled train set based on model predictive control. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Chen, M.; Xun, J.; Liu, Y. A coordinated collision mitigation approach for virtual coupling trains by using model predictive control. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Chai, M.; Su, H.; Liu, H. Long short-term memory-based model predictive control for virtual coupling in railways. Wirel. Commun. Mob. Comput. 2022, 2022, 1859709. [Google Scholar] [CrossRef]
- Luo, X.; Liu, H.; Zhang, L.; Xun, J. A model predictive control based inter-station driving strategy for virtual coupling trains in railway system. In Proceedings of the 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), Indianapolis, IN, USA, 19–22 September 2021; pp. 3927–3932. [Google Scholar] [CrossRef]
- Xun, J.; Yin, J.; Liu, R.; Liu, F.; Zhou, Y.; Tang, T. Cooperative control of high-speed trains for headway regulation: A self-triggered model predictive control based approach. Transp. Res. Part C Emerg. Technol. 2019, 102, 106–120. [Google Scholar] [CrossRef]
- Milenković, M.S.; Bojović, N.J.; Švadlenka, L.; Melichar, V. A stochastic model predictive control to heterogeneous rail freight car fleet sizing problem. Transp. Res. Part E Logist. Transp. Rev. 2015, 82, 162–198. [Google Scholar] [CrossRef]
- Bemporad, A.; Morari, M. Robust model predictive control: A survey. In Robustness in identification and control; Springer: London, UK, 1999; pp. 207–226. [Google Scholar] [CrossRef]
- Zeilinger, M.N.; Raimondo, D.M.; Domahidi, A.; Morari, M.; Jones, C.N. On real-time robust model predictive control. Automatica 2014, 50, 683–694. [Google Scholar] [CrossRef]
- Löfberg, J. Automatic robust convex programming. Optim. Methods Softw. 2012, 27, 115–129. [Google Scholar] [CrossRef]
- Lorenzen, M.; Cannon, M.; Allgöwer, F. Robust MPC with recursive model update. Automatica 2019, 103, 461–471. [Google Scholar] [CrossRef]
- Li, G.; Zou, J.; Ma, W.; Lan, M. Research on virtual coupling technology in rail transit train collision protection. Transp. Saf. Environ. 2023. [Google Scholar] [CrossRef]
- Xun, J.; Chen, M.; Liu, Y.; Liu, F. An overspeed protection mechanism for virtual coupling in railway. IEEE Access 2020, 8, 187400–187410. [Google Scholar] [CrossRef]
- Liu, W.; Shangguan, W.; Song, H.; Pan, J. A virtual coupling operation strategy based on state transition considering special case. In Proceedings of the 2022 China Automation Congress (CAC), Xiamen, China, 25–27 November 2022; IEEE: Piscataway Township, NJ, USA, 2022; pp. 5772–5777. [Google Scholar] [CrossRef]
- Lucia, S.; Engell, S. Potential and limitations of multi-stage nonlinear model predictive control. IFAC-PapersOnLine 2015, 48, 1015–1020. [Google Scholar] [CrossRef]
- Richards, A.; How, J. Robust stable model predictive control with constraint tightening. In Proceedings of the 2006 American Control Conference, Minneapolis, MN, USA, 14–16 June 2006; IEEE: Piscataway Township, NJ, USA, 2006; p. 6. [Google Scholar] [CrossRef]
- Subramanian, S.; Abdelsalam, Y.; Lucia, S.; Engell, S. Robust tube-enhanced multi-stage NMPC with stability guarantees. IEEE Control Syst. Lett. 2021, 6, 1112–1117. [Google Scholar] [CrossRef]
- Li, C.; Wang, J.; Shan, J.; Lanzon, A.; Petersen, I.R. Robust cooperative control of networked train platoons: A negative-imaginary systems’ perspective. IEEE Trans. Control Netw. Syst. 2021, 8, 1743–1753. [Google Scholar] [CrossRef]
- Heirung, T.A.N.; Paulson, J.A.; O’leary, J.; Mesbah, A. Stochastic model predictive control—How does it work? Comput. Chem. Eng. 2018, 114, 158–170. [Google Scholar] [CrossRef]
- Brüdigam, T.; Jacumet, R.; Wollherr, D.; Leibold, M. Safe stochastic model predictive control. In Proceedings of the IEEE 2022 Conference on Decision and Contro, Cancún, Mexico, 6–9 December 2022. [Google Scholar]
- Mesbah, A. Stochastic model predictive control with active uncertainty learning: A Survey on dual control. Annu. Rev. Control 2018, 45, 107–117. [Google Scholar] [CrossRef]
- Shen, X.; Boyd, S. Incremental proximal multi-forecast model predictive control. arXiv 2021. [Google Scholar] [CrossRef]
- Ma, Y.; Li, C.; Wang, S. Multi-objective energy management strategy for fuel cell hybrid electric vehicle based on stochastic model predictive control. ISA Trans. 2022, 131, 178–196. [Google Scholar] [CrossRef]
- Tang, H.; Wang, Q.; Feng, X. Robust stochastic control for high-speed trains with nonlinearity, parametric uncertainty, and multiple time-varying delays. IEEE Trans. Intell. Transp. Syst. 2017, 19, 1027–1037. [Google Scholar] [CrossRef]
- Song, H.; Shen, T.; Wang, W. Train-centric communication-based close proximity driving train movement authority system. IEEE Intell. Transp. Syst. Mag. 2018, 10, 22–34. [Google Scholar] [CrossRef]
- Bujarbaruah, M.; Zhang, X.; Rosolia, U.; Borrelli, F. Adaptive MPC for iterative tasks. In Proceedings of the 2018 IEEE Conference on Decision and Control (CDC), Miami, FL, USA, 17–19 December 2022; IEEE: Piscataway Township, NJ, USA, 2018; pp. 6322–6327. [Google Scholar] [CrossRef]
- Rosolia, U.; Borrelli, F. Learning model predictive control for iterative tasks: A computationally efficient approach for linear system. IFAC-PapersOnLine 2017, 50, 3142–3147. [Google Scholar] [CrossRef]
- Zhu, E.L.; Sturz, Y.R.; Rosolia, U.; Borrelli, F. Trajectory optimization for nonlinear multi-agent systems using decentralized learning model predictive control. In Proceedings of the 2020 59th IEEE Conference on Decision and Control (CDC), Jeju, South Korea, 14–18 December 2020; IEEE: Piscataway Township, NJ, USA, 2020; pp. 6198–6203. [Google Scholar] [CrossRef]
- Scianca, N.; Rosolia, U.; Borrelli, F. Learning Model Predictive Control for Periodic Repetitive Tasks. In Proceedings of the 2020 European Control Conference (ECC), St. Petersburg, Russia, 12–15 May 2020; IEEE: Piscataway Township, NJ, USA, 2020. [Google Scholar] [CrossRef]
- Rosolia, U.; Borrelli, F. Learning model predictive control for iterative tasks. A data-driven control framework. IEEE Trans. Autom. Control 2017, 63, 1883–1896. [Google Scholar] [CrossRef]
- Rosolia, U.; Zhang, X.; Borrelli, F. A Stochastic MPC approach with application to iterative learning. In Proceedings of the 2018 IEEE Conference on Decision and Control (CDC), Miami, FL, USA, 17–19 December 2018; IEEE: Piscataway Township, NJ, USA, 2018; pp. 5152–5157. [Google Scholar] [CrossRef]
- Rosolia, U.; Zhang, X.; Borrelli, F. Data-driven predictive control for autonomous systems. Annu. Rev. Control Robot. Auton. Syst. 2018, 1, 259–286. [Google Scholar] [CrossRef]
- Rosolia, U.; Borrelli, F. Minimum time learning model predictive control. Int. J. Robust Nonlinear Control 2020, 31, 8830–8854. [Google Scholar] [CrossRef]
- Rosolia, U.; Zhang, X.; Borrelli, F. Robust learning model-predictive control for linear systems performing iterative tasks. IEEE Trans. Autom. Control 2021, 67, 856–869. [Google Scholar] [CrossRef]
- Zhang, K.; Shi, Y. Adaptive model predictive control for a class of constrained linear systems with parametric uncertainties. Automatica 2020, 117, 108974. [Google Scholar] [CrossRef]
- Bujarbaruah, M.; Zhang, X.; Tanaskovic, M.; Borrelli, F. Adaptive stochastic MPC under time-varying uncertainty. IEEE Trans. Autom. Control 2020, 66, 2840–2845. [Google Scholar] [CrossRef]
- Wang, X.; Huang, D.; Xing, H. A Train cooperative operation optimization method based on improved reinforcement learning algorithm. In Proceedings of the 4th International Conference on Industrial Artificial Intelligence (IAI), Shenyang, China, 24–27 August 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Wang, X.; Wu, Y.; Huang, D.; Zhu, L.; Lu, Z.; He, Y. A train cooperative operation optimization method considering passenger comfort based on reinforcement learning. In Proceedings of the 2022 IEEE 11th Data Driven Control and Learning Systems Conference (DDCLS), Chengdu, China, 3–5 August 2022; pp. 368–373. [Google Scholar] [CrossRef]
- Liu, H.; Yang, L.; Yang, H. Cooperative optimal control of the following operation of high-speed trains. IEEE Trans. Intell. Transp. Syst. 2022, 23, 17744–17755. [Google Scholar] [CrossRef]
- Wang, H.; Zhao, Q.; Lin, S.; Cui, D.; Luo, C.; Zhu, L.; Wang, X.; Tang, T. A reinforcement learning empowered cooperative control approach for IIoT-based virtually coupled train sets. IEEE Trans. Ind. Informatics 2020, 17, 4935–4945. [Google Scholar] [CrossRef]
- Jia, Y.; Huang, D.; Li, X. Tracking control of two virtually coupled trains via prescribed performance control method. In Proceedings of the 2022 IEEE 11th Data Driven Control and Learning Systems Conference (DDCLS), Chengdu, China, 3–5 August 2022; pp. 268–273. [Google Scholar] [CrossRef]
- Du, Z.; Wu, H.; Yang, Z.; Wen, X. Research on intelligent formation operation performance of straddle-type rapid transit vehicles in heterogeneous operating environment. Mechanika 2023, 29, 59–66. [Google Scholar] [CrossRef]
- Yong, Z.; Sirui, Z. Typical train virtual coupling scenario modeling and analysis of train control system based on vehicle-vehicle communication. In Proceedings of the 2020 IEEE 6th International Conference on Control Science and Systems Engineering (ICCSSE), Beijing, China, 17–19 July 2020; pp. 143–148. [Google Scholar] [CrossRef]
- Zhou, X.; Lu, F.; Wang, L. Optimization of train operation planning with full-length and short-turn routes of virtual coupling trains. Appl. Sci. 2022, 12, 7935. [Google Scholar] [CrossRef]
- Hao, A.Z.; Yan, B.F.; Niu, C.R. A Key Step to Virtual Coupling. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Su, S.; Liu, W.; Zhu, Q.; Li, R.; Tang, T.; Lv, J. A cooperative collision-avoidance control methodology for virtual coupling trains. Accid. Anal. Prev. 2022, 173, 106703. [Google Scholar] [CrossRef] [PubMed]
- Ma, S.; Wang, H.; Li, Z.; Zhang, Q. A novel approach for estimating performance of IIoT-based virtual control train sets under DoS attacks. Secur. Commun. Networks 2022, 2022, 1781757. [Google Scholar] [CrossRef]
- Basile, G.; Lui, D.G.; Petrillo, A.; Santini, S. Deep deterministic policy gradient-based virtual coupling control for high-speed train convoys. In Proceedings of the 2022 IEEE International Conference on Networking, Sensing and Control (ICNSC), Shanghai, China, 15–18 December 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Ludicke, D.; Lehner, A. Train communication networks and prospects. IEEE Commun. Mag. 2019, 57, 39–43. [Google Scholar] [CrossRef]
- Moreno, J.; Riera, J.M.; de Haro, L.; Rodriguez, C. A survey on future railway radio communications services: Challenges and opportunities. IEEE Commun. Mag. 2015, 53, 62–68. [Google Scholar] [CrossRef]
- Hu, J.; Liu, G.; Li, Y.; Ma, Z.; Wang, W.; Liang, C.; Yu, F.R.; Fan, P. Off-network communications for future railway mobile communication systems: Challenges and opportunities. IEEE Commun. Mag. 2022, 60, 64–70. [Google Scholar] [CrossRef]
- Unterhuber, P.; Pfletschinger, S.; Sand, S.; Soliman, M.; Jost, T.; Arriola, A.; Val, I.; Cruces, C.; Moreno, J.; García-Nieto, J.P.; et al. A survey of channel measurements and models for current and future railway communication systems. Mob. Inf. Syst. 2016, 2016, 1–14. [Google Scholar] [CrossRef]
- Unterhuber, P.; Lehner, A.; Müller, F.D.P. Measurement and analysis of ITS-G5 in railway environments. In Communication Technologies for Vehicles; Springer: Cham, Switzerland, 2016; Volume 9669, pp. 62–73. [Google Scholar] [CrossRef]
- Gomez, A.A.; Mozo, E.; Bernado, L.; Zelenbaba, S.; Zemen, T.; Parrilla, F.; Alberdi, A. Performance analysis of ITS-G5 for smart train composition coupling. In Proceedings of the 2018 16th International Conference on Intelligent Transportation Systems Telecommunications (ITST); 2018; pp. 1–7. [Google Scholar] [CrossRef]
- Le, H.Q.; Lehner, A.; Sand, S. Performance analysis of ITS-G5 for dynamic train coupling application. In Communication Technologies for Vehicles; Springer: Cham, Switzerland, 2015; pp. 129–140. [Google Scholar] [CrossRef]
- Yang, K.; Berbineau, M.; Ghys, J.-P.; Cocheril, Y.; Seetharamdoo, D. Propagation measurements with regional train at 60 GHz for virtual coupling application. In Proceedings of the 2017 11th European Conference on Antennas and Propagation (EUCAP), Paris, France, 19–24 March 2017. [Google Scholar] [CrossRef]
- Unterhuber, P.; Sand, S.; Fiebig, U.; Siebler, B. Path loss models for train-to-train communications in typical high speed railway environments. IET Microw. Antennas Propag. 2018, 12, 492–500. [Google Scholar] [CrossRef]
- Zeller, P.; Siebler, B.; Lehner, A.; Sand, S. Relative train localization for cooperative maneuvers using GNSS pseudoranges and geometric track information. In Proceedings of the 2015 International Conference on Location and GNSS (ICL-GNSS), Gothenburg, Sweden, 22–24 June 2015; IEEE: Piscataway Township, NJ, USA, 2015; pp. 1–7. [Google Scholar] [CrossRef]
- Lichtblau, J.; Scheiner, B.; Michler, F.; Graebner, M.; Sanftl, B.; Weigel, R.; Koelpin, A. Novel approach for virtual coupling of trains using different modulation and coding schemes. In Proceedings of the 2018 International Conference on Intelligent Rail Transportation (ICIRT), Singapore, 12–14 December 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Parise, R.; Dittus, H.; Winter, J.; Lehner, A. Reasoning functional requirements for virtually coupled train sets: Communication. IEEE Commun. Mag. 2019, 57, 12–17. [Google Scholar] [CrossRef]
- Trzuskowsky, A.; Wehr, M.; Abel, D. Virtual coupling: A cooperative and collaborative autonomous navigation application. In Proceedings of the 29th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2016), Portland, OR, USA, 12–16 September 2016; pp. 1096–1102. [Google Scholar] [CrossRef]
- Song, H.; Schnieder, E. Development and evaluation procedure of the train-centric communication-based system. IEEE Trans. Veh. Technol. 2018, 68, 2035–2043. [Google Scholar] [CrossRef]
- Song, H.; Wu, W.; Dong, H.; Schnieder, E. Propagation and safety analysis of the train-to-train communication system. IET Microw. Antennas Propag. 2019, 13, 2324–2329. [Google Scholar] [CrossRef]
- Verma, S.; Ghazel, M.; Berbineau, M. Model-based dependability evaluation of a Wireless Communication System in a Virtually Coupled Train Set. IFAC-PapersOnLine 2021, 54, 179–186. [Google Scholar] [CrossRef]
- Ma, S.; Bu, B.; Wang, H. A virtual coupling approach based on event-triggering control for CBTC systems under jamming attacks. In Proceedings of the 2020 IEEE 92nd Vehicular Technology Conference (VTC2020-Fall), Victoria, BC, Canada, 18 November–16 December 2020; pp. 1–6. [Google Scholar]
- Kadkhodayi, F.; Mohammad-Ali-Nezhad, S.; Ghasemi, R. A wideband beam shaping reflector antenna using model predictive control. Int. J. RF Microw. Comput. Eng. 2020, 30, e22220. [Google Scholar] [CrossRef]
- Mujica, G.; Henche, J.; Portilla, J. Internet of Things in the railway domain: Edge sensing system based on solid-state LIDAR and fuzzy clustering for virtual coupling. IEEE Access 2021, 9, 68093–68107. [Google Scholar] [CrossRef]
- Li, Z.; Adeli, H. Control methodologies for vibration control of smart civil and mechanical structures. Expert Syst. 2018, 35, e12354. [Google Scholar] [CrossRef]
- Soto, M.G.; Adeli, H. Multi-agent replicator controller for sustainable vibration control of smart structures. J. Vibroengineering 2017, 19, 4300–4322. [Google Scholar] [CrossRef]
- Hormozabad, S.J.; Soto, M.G.; Adeli, H. Integrating structural control, health monitoring, and energy harvesting for smart cities. Expert Syst. 2021, 38, e12845. [Google Scholar] [CrossRef]
- Kour, R.; Patwardhan, A.; Thaduri, A.; Karim, R. A review on cybersecurity in railways. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2022, 237, 3–20. [Google Scholar] [CrossRef]
- Tang, R.; De Donato, L.; Besinović, N.; Flammini, F.; Goverde, R.M.; Lin, Z.; Liu, R.; Tang, T.; Vittorini, V.; Wang, Z. A literature review of Artificial Intelligence applications in railway systems. Transp. Res. Part C: Emerg. Technol. 2022, 140, 103679. [Google Scholar] [CrossRef]
- Basile, G.; Napoletano, E.; Petrillo, A.; Santini, S. Roadmap and challenges for reinforcement learning control in railway virtual coupling. Discov. Artif. Intell. 2022, 2, 27. [Google Scholar] [CrossRef]




















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).