

Research on High-Precision Position Control of Valve-Controlled Cylinders Based on Variable Structure Control
Abstract
:1. Introduction
2. Establishment of the Mathematical Model of the Valve-Controlled Cylinder Position System
2.1. Composition of the Electro-Hydraulic Servo System
2.2. Establishment of the mathematical model
3. Design of the SMC
3.1. Design of the Sliding Mode Surface
3.2. Design of the Sliding Mode Approach Law
3.3. Problems in SMC
- Due to the high-frequency switching of the control parameters, the system’s motion points quickly pass through the sliding surface in a short period of time, resulting in the chattering phenomenon. This phenomenon will reduce the steady-state positioning accuracy of the system and even cause the system to become unstable and damage the motion mechanism [21];
- When the motion point of the system approaches the sliding mode surface, the system is easily affected by parameter perturbations and unstructured disturbances, which reduces its stability [22];
- In practical applications, the boundaries between system parameters and load disturbances are difficult to obtain, and it is also difficult to calculate the sliding mode equivalent control of known systems;
- In the design of sliding surfaces, not all state variables can be directly measured.
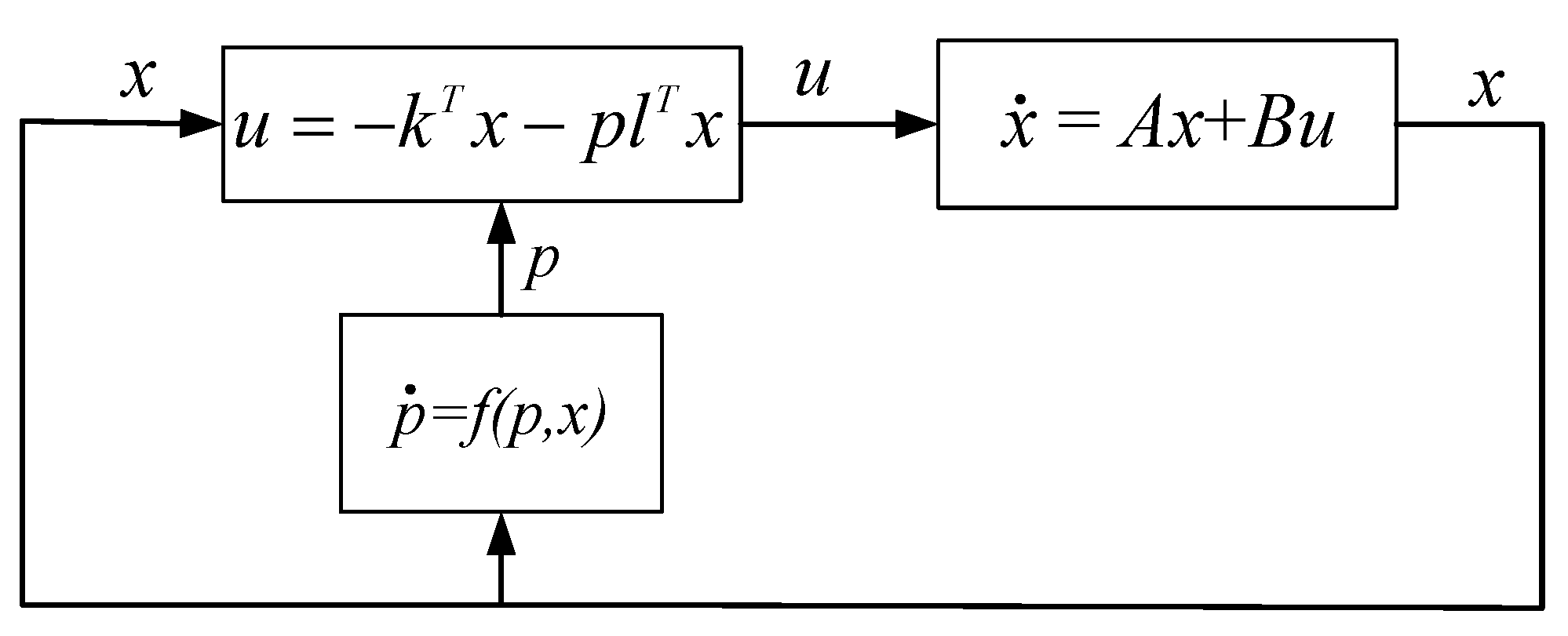
4. Design of the DSVSC
4.1. Overall Design of the DSVSC
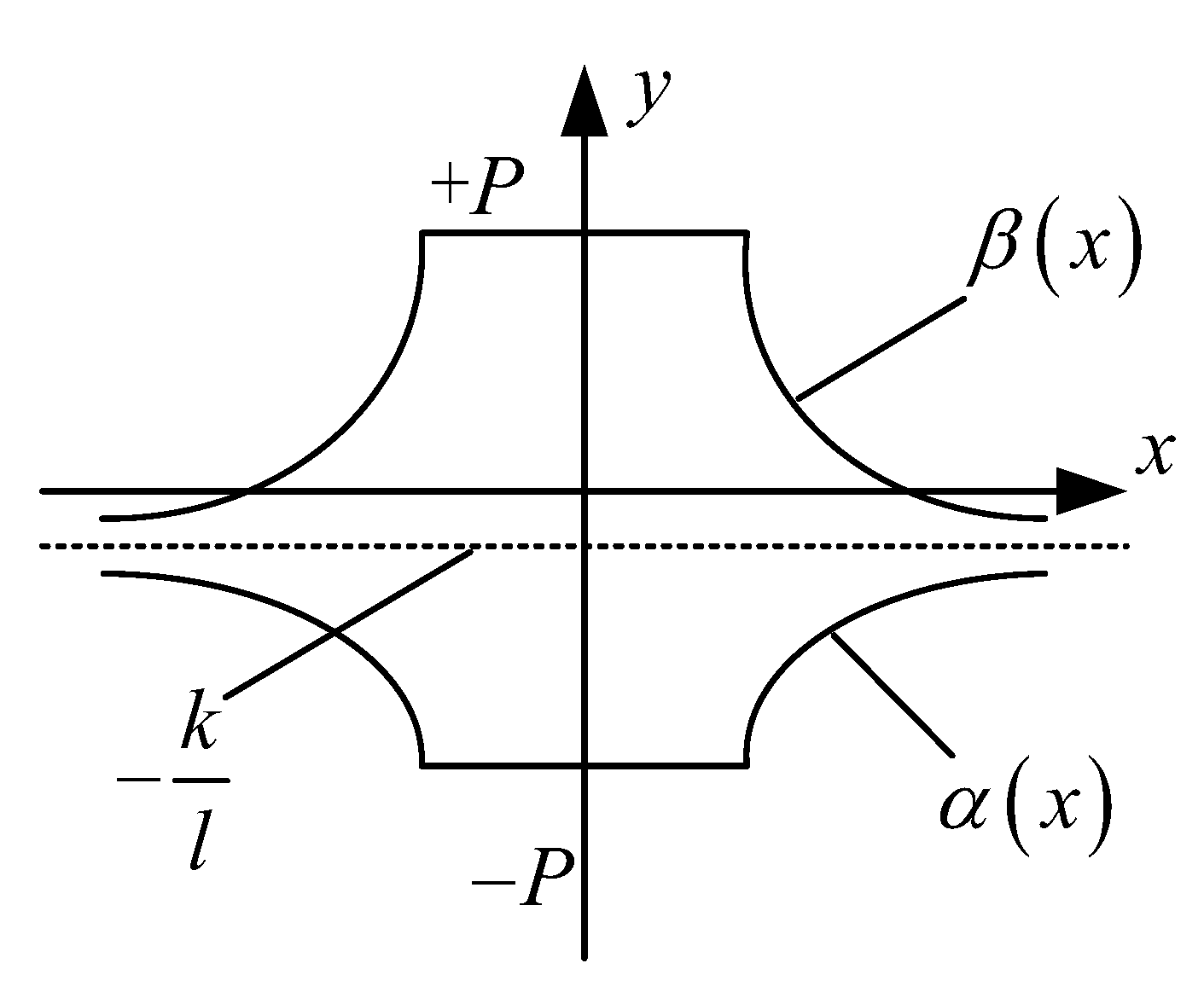
4.2. Design of the Selection Strategy for the DSVSC
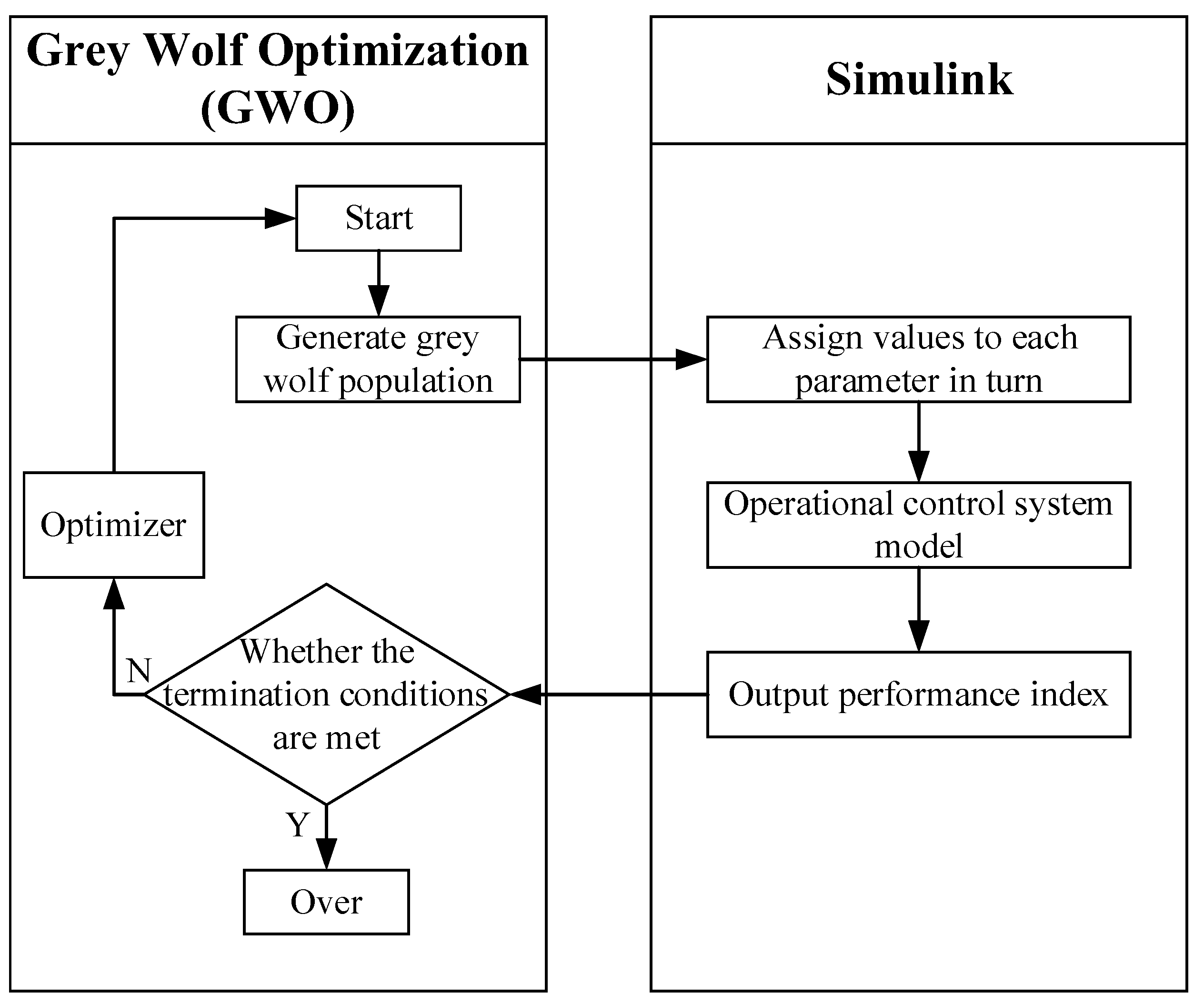
4.3. Setting of Control Parameters
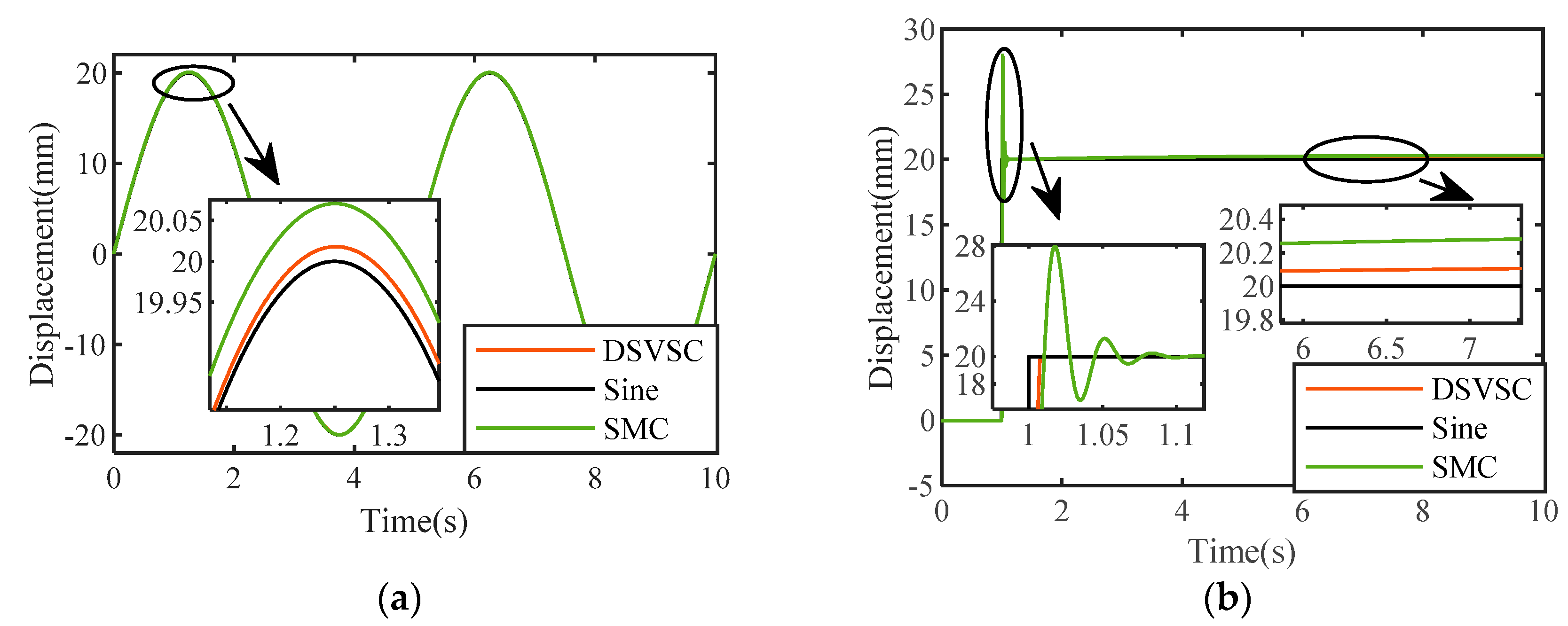
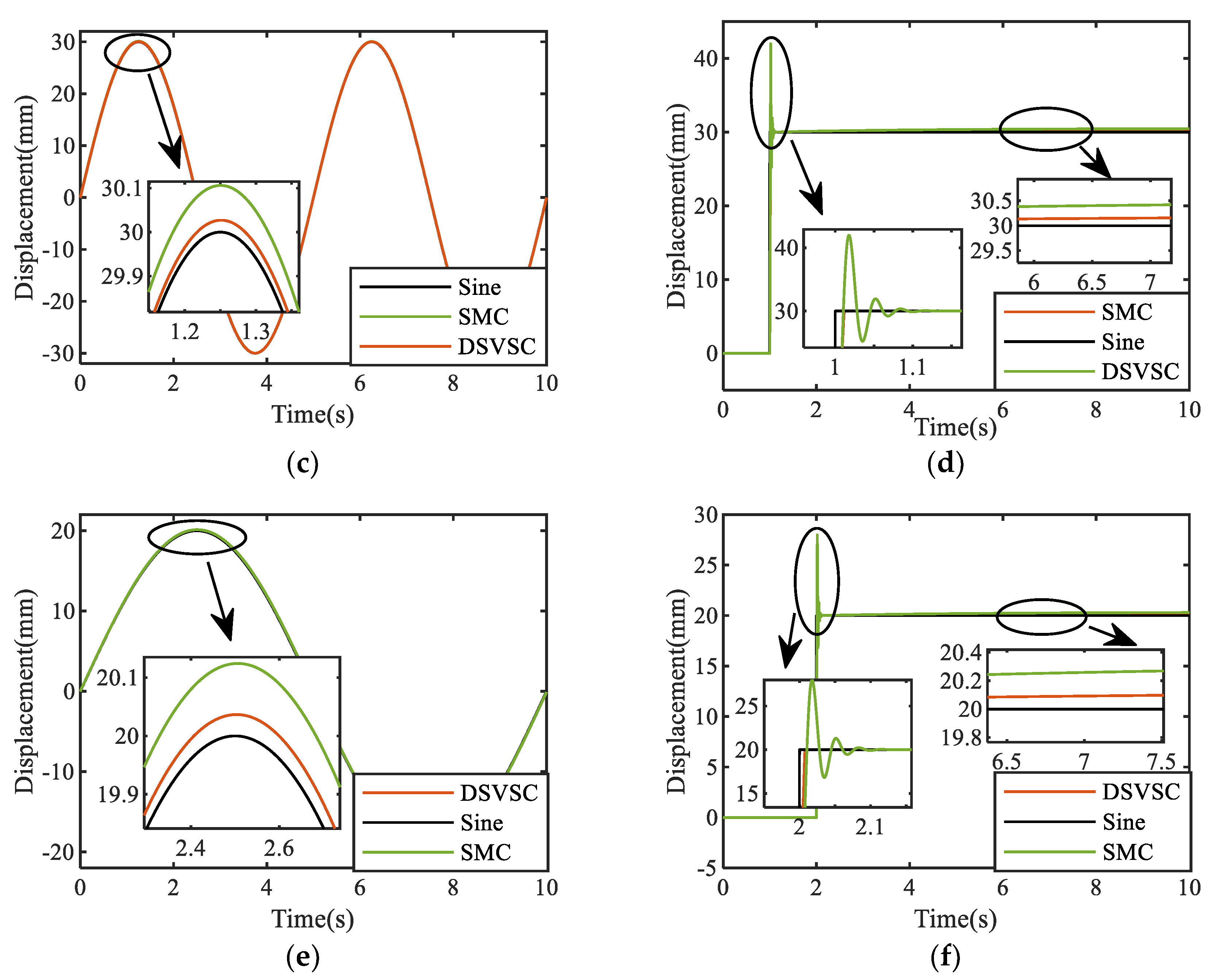
5. Simulation Analysis
6. Experimental Verification
6.1. Composition of the Experimental Platform
6.2. Experimental Verification of Controllers for the Valve-Controlled Cylinder Position System
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Karpenko, M.; Stosiak, M.; Šukevičius, Š.; Skačkauskas, P.; Urbanowicz, K.; Deptuła, A. Hydrodynamic Processes in Angular Fitting Connections of a Transport Machine’s Hydraulic Drive. Machines 2023, 11, 355. [Google Scholar] [CrossRef]
- Bury, P.; Stosiak, M.; Urbanowicz, K.; Kodura, A.; Kubrak, M.; Malesińska, A. A Case Study of Open-and Closed-Loop Control of Hydrostatic Transmission with Proportional Valve Start-Up Process. Energies 2022, 15, 1860. [Google Scholar] [CrossRef]
- Hou, S.; Chen, C.; Chu, Y.; Fei, J. Experimental validation of modified adaptive fuzzy control for power quality improvement. IEEE Access 2020, 8, 92162–92171. [Google Scholar] [CrossRef]
- Pal, A.K.; Naskar, I.; Paul, S. A Fuzzy-Based Modified Gain Adaptive Scheme for Model Reference Adaptive Control. In Information and Decision Sciences: Proceedings of the 6th International Conference on FICTA; Springer: Singapore, 2018; pp. 315–324. [Google Scholar]
- Bai, S.; Ben-Tzvi, P.; Zhou, Q.; Huang, X. Variable structure controller design for linear systems with bounded inputs. Int. J. Control. Autom. Syst. 2011, 9, 228–236. [Google Scholar] [CrossRef]
- Adamy, J.; Flemming, A. Soft variable-structure controls: A survey. Automatica 2004, 40, 1821–1844. [Google Scholar] [CrossRef] [Green Version]
- Fan, Y.; Shao, J.; Sun, G. Optimized PID controller based on beetle antennae search algorithm for electro-hydraulic position servo control system. Sensors 2019, 19, 2727. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yao, B.; Bu, F.; Chiu, G.T. Non-linear adaptive robust control of electro-hydraulic systems driven by double-rod actuators. Int. J. Control 2001, 74, 761–775. [Google Scholar] [CrossRef]
- Gao, B.; Shao, J.; Yang, X. A compound control strategy combining velocity compensation with ADRC of electro-hydraulic position servo control system. ISA Trans. 2014, 53, 1910–1918. [Google Scholar] [CrossRef] [PubMed]
- Peng, X.B.; Gong, G.F.; Yang, H.Y.; Lou, H.Y.; Wu, W.Q.; Liu, T. Quantitative feedback controller design and test for an electro-hydraulic position control system in a large-scale reflecting telescope. Front. Inf. Technol. Electron. Eng. 2017, 18, 1624–1634. [Google Scholar] [CrossRef]
- Tri, N.M.; Nam, D.N.C.; Park, H.G.; Ahn, K.K. Trajectory control of an electro hydraulic actuator using an iterative backstepping control scheme. Mechatronics 2015, 29, 96–102. [Google Scholar] [CrossRef]
- Utkin, V. Variable structure systems with sliding modes. IEEE Trans. Autom. Control 1977, 22, 212–222. [Google Scholar] [CrossRef]
- Utkin, V. Discussion aspects of high-order sliding mode control. IEEE Trans. Autom. Control 2015, 61, 829–833. [Google Scholar] [CrossRef]
- AQiu, H.D.; Zhang, X.G.; Fan, Y.X. Research on Electro-hydraulic Position Synchronous Servo System Based on Feedback Linearization Sliding Mode Control. Mach. Build. Autom. 2022, 51. [Google Scholar]
- Xiong, J.J.; Zhang, G.B. Global fast dynamic terminal sliding mode control for a quadrotor UAV. ISA Trans.-Actions 2017, 66, 233–240. [Google Scholar] [CrossRef] [PubMed]
- Yi, G.A.N.; Yang, C.H.E.N.; Fujia, S.U.N. Research of interference torque on car camera stabilized platform based on variable structure control. Mach. Des. Manuf. 2019, 1, 111–114. [Google Scholar]
- Gao, B.; Guan, H.; Tang, W.; Han, W.; Xue, S. Research on Position Recognition and Control Method of Single-leg Joint of Hydraulic Quadruped Robot. Recent Adv. Electr. Electron. Eng. Former. Recent Pat. Electr. Electron. Eng. 2021, 14, 802–811. [Google Scholar] [CrossRef]
- Milecki, A.; Ortmann, J. Electrohydraulic linear actuator with two stepping motors controlled by overshoot-free algorithm. Mech. Syst. Signal Process. 2017, 96, 45–57. [Google Scholar] [CrossRef]
- Hongcheng, Y.; Xiaoxian, Y. Modeling and Simulation of Double Nozzle Flapper Gas Servo Valve. In Proceedings of the 2017 International Conference on Computer Systems, Electronics and Control (ICCSEC), Dalian, China, 25–27 December 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 210–215. [Google Scholar]
- Jelali, M.; Kroll, A. Hydraulic Servo-Systems: Modelling, Identification and Control; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2002; pp. 69–72. [Google Scholar]
- El Makrini, I.; Rodriguez-Guerrero, C.; Lefeber, D.; Vanderborght, B. The variable boundary layer sliding mode control: A safe and performant control for compliant joint manipulators. IEEE Robot. Autom. Lett. 2016, 2, 187–192. [Google Scholar] [CrossRef]
- Kali, Y.; Rodas, J.; Gregor, R.; Saad, M.; Benjelloun, K. Attitude tracking of a tri-rotor UAV based on robust sliding mode with time delay estimation. In Proceedings of the 2018 International Conference on Unmanned Aircraft Systems (ICUAS), Dallas, TX, USA, 12–15 June 2018; pp. 346–351. [Google Scholar]
- Liu, Y.L.; Gao, C.C.; Meng, B.; Cong, X.W. Dynamic soft variable structure control for singular systems. In Proceedings of the 30th Chinese Control Conference, Shenyang, China, 9–11 June 2018; pp. 2572–2577. [Google Scholar]
- Lee, H.; Utkin, V.I. Chattering suppression methods in sliding mode control systems. Annu. Rev. Control 2007, 31, 179–188. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Part | Name and Symbol | Parameter Value |
|---|---|---|
| Hydraulic pump station | Supply pressure of the system Ps/MPa | 5 |
| Bulk modulus of elasticity βe/Pa | 7 × 108 | |
| Valve-controlled cylinder section | Stroke y/mm | ±100 |
| Effective area Ap/mm2 | 1 × 10−3 | |
| Effective volume Vt/mm3 | 2 × 10−4 | |
| Leakage coefficient Ctp/m3/(s·Pa) | 5 × 10−18 | |
| Equivalent mass of the hydraulic cylinder mt/kg | 25 | |
| Viscous friction coefficient Bp/N/(m/s) | 400 | |
| Flow-pressure coefficient Kc/m3/(s·Pa) | 4.8 × 10−13 | |
| Flow gain of the servo valve Ksv/m3/(s·A) | 0.00579 | |
| Natural frequency ωsv/(rad/s) | 628 | |
| Damping ratio ξsv | 0.5 | |
| Control section | Displacement sensor coefficient Kf/V/m | 50 |
| Servo amplifier coefficient Ka/A/V | 0.004 |
| Part | Name | Model |
|---|---|---|
| Hydraulic pump station | Motor | Y2-160L-4 |
| Hydraulic pump | PCY14-1B | |
| Relief valve | DBD-type direct acting relief valve | |
| Valve-controlled cylinder section | Electro-hydraulic servo valve | FF102-30-type double nozzle baffle servo valve |
| Displacement sensor | FXB-V71/100 | |
| Control section | Data acquisition card | PCL-1710HG |
| IPC | IPC-610H | |
| Industrial motherboards | PCA-6114P4-B |
| Input Signal | Evaluating Indicator | Group Number | DSVSC | SMC |
|---|---|---|---|---|
| Sine | Amplitude attenuation (%) | Group. 1 | −1.5 | −3.0 |
| Group 2 | −2.5 | −3.0 | ||
| Group 3 | −1.9 | −2.9 | ||
| Phase lag (°) | Group 1 | 0.03 | −0.04 | |
| Group 2 | 0.02 | −0.02 | ||
| Group 3 | 0.07 | −0.02 |
| Input Signal | Evaluating Indicator | Group Number | DSVSC | SMC |
|---|---|---|---|---|
| Step | Amplitude attenuation (%) | Group 1 | 20 | 19.86 |
| Group 2 | 20 | 19.86 | ||
| Group 3 | 30 | 29.86 | ||
| Phase lag (°) | Group 1 | 2.064 | 2.051 | |
| Group 2 | 3.564 | 3.554 | ||
| Group 3 | 2.072 | 2.0625 | ||
| Peak time (s) | Group 1 | 2.096 | 2.088 | |
| Group 2 | 3.598 | 3.588 | ||
| Group 3 | 2.1035 | 2.091 | ||
| Overshoot (%) | Group 1 | 0.179 | 2.2 | |
| Group 2 | 0.118 | 1.5 | ||
| Group 3 | 2.85 | 2.91 | ||
| Adjust time (s) (Δ = 0.05) | Group 1 | 2.07 | 2.056 | |
| Group 2 | 3.571 | 3.561 | ||
| Group 3 | 2.08 | 2.0691 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, B.; Zhang, W.; Zheng, L.; Zhao, H. Research on High-Precision Position Control of Valve-Controlled Cylinders Based on Variable Structure Control. Machines 2023, 11, 623. https://doi.org/10.3390/machines11060623
Gao B, Zhang W, Zheng L, Zhao H. Research on High-Precision Position Control of Valve-Controlled Cylinders Based on Variable Structure Control. Machines. 2023; 11(6):623. https://doi.org/10.3390/machines11060623
Chicago/Turabian StyleGao, Bingwei, Wei Zhang, Lintao Zheng, and Hongjian Zhao. 2023. "Research on High-Precision Position Control of Valve-Controlled Cylinders Based on Variable Structure Control" Machines 11, no. 6: 623. https://doi.org/10.3390/machines11060623