

A Novel Customised Load Adaptive Framework for Induction Motor Fault Classification Utilising MFPT Bearing Dataset



Abstract
1. Introduction
- Comprehensive time and frequency analysis: This study conducts a comprehensive time and frequency domain analysis under six load conditions. This analysis highlights patterns and variations in fault severity, providing valuable insights into IM behaviour.
- Optimal Continuous Wavelet Transform (CWT) approach: The selection of an optimal CWT approach using WSE contributes to improved signal processing for time–frequency feature extraction, denoising, and pattern recognition.
- Revealing load-dependent fault subclasses: This represents an innovative extension of traditional fault classification methods. It effectively accommodates load variations and customisation, making it adaptable to different IM datasets. This research identifies and classifies load-dependent fault subclasses, including mild, moderate, and severe, which enhances the understanding of fault severity in different load scenarios.
- Proposing a Customised Load Assessment Framework (CLAF): The research introduces a novel CLAF, representing a pioneering approach in fault classification for Induction Motors (IMs). CLAF extends traditional fault classification methodologies by considering load variations and dataset customisation.
2. Background and Related Work
2.1. Feature Extraction Domains
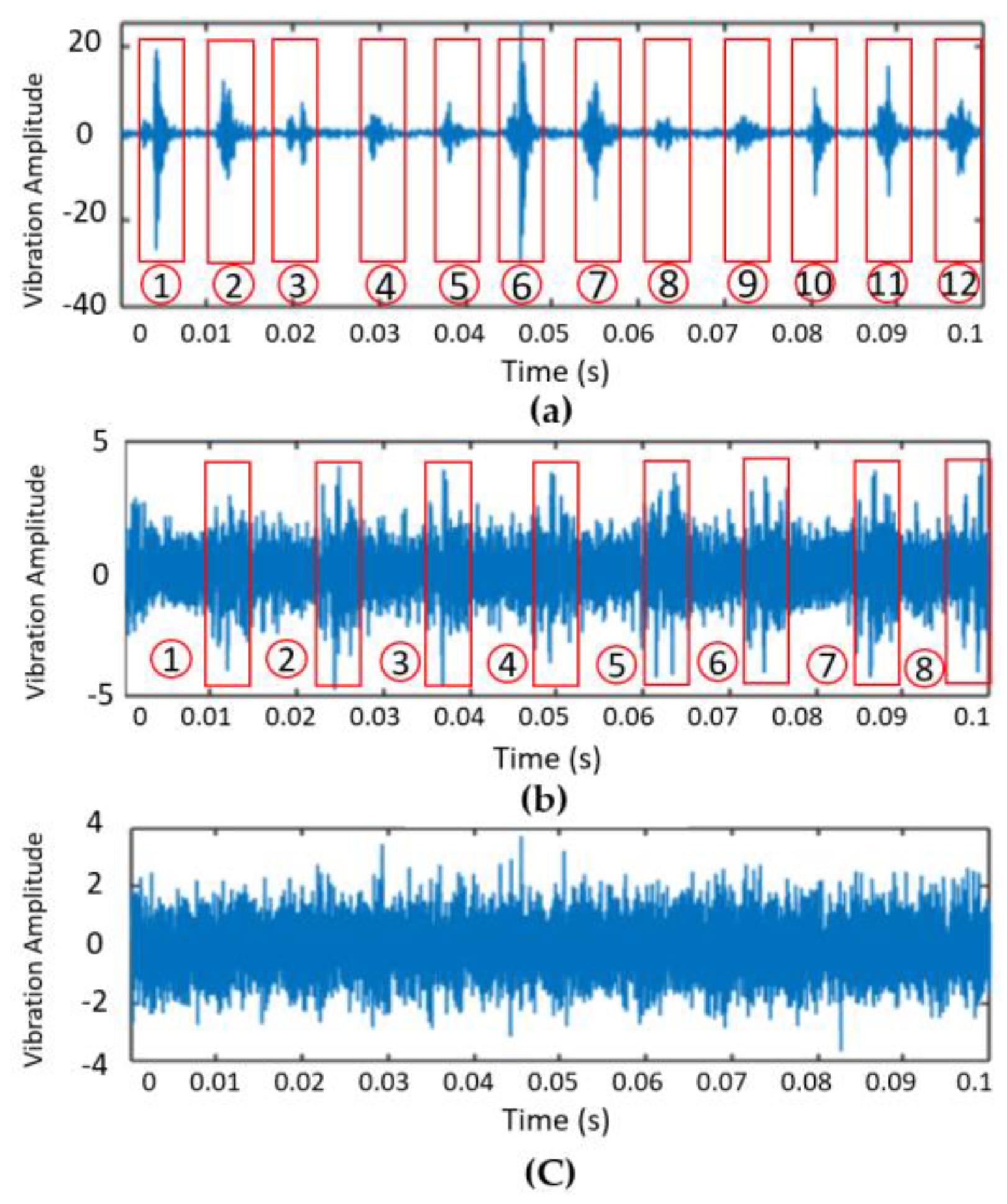
2.1.1. Time Domain Analysis
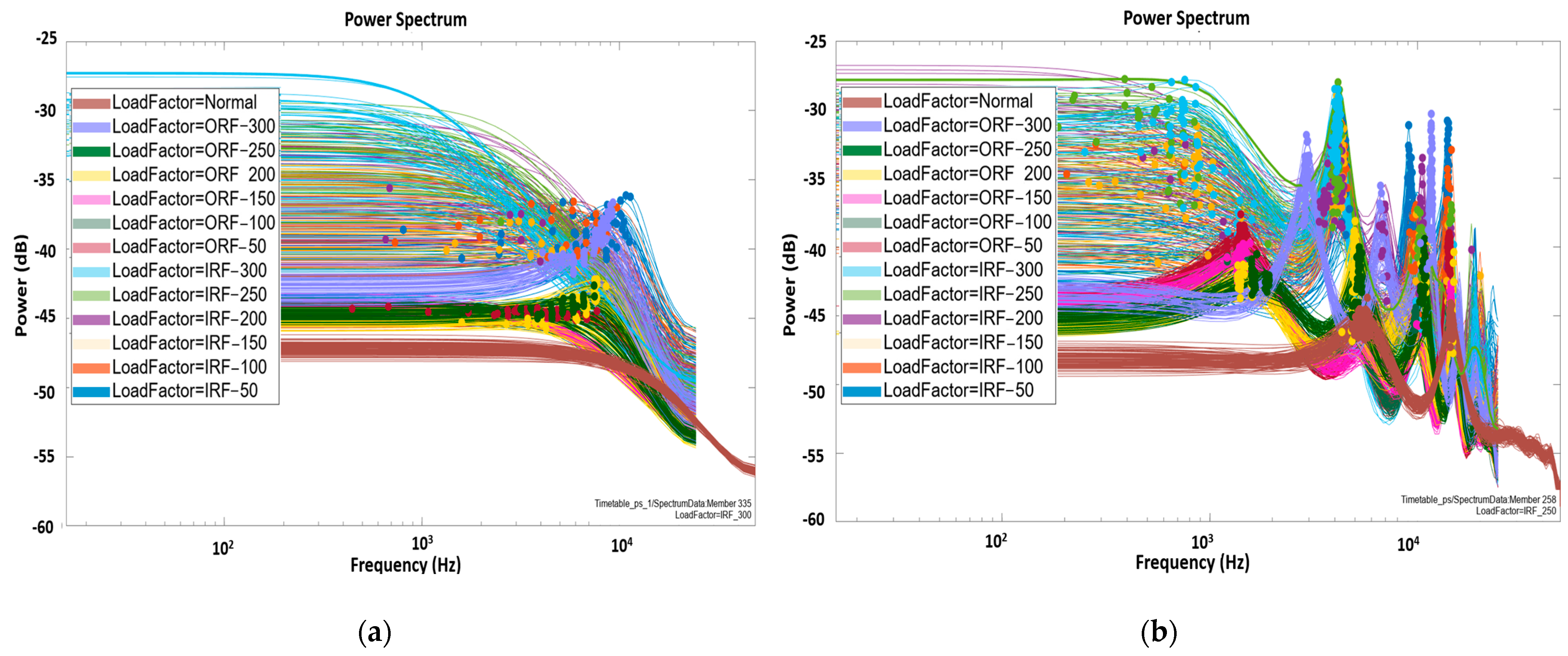
2.1.2. Frequency Domain Analysis
2.1.3. Time–Frequency Domain Analysis
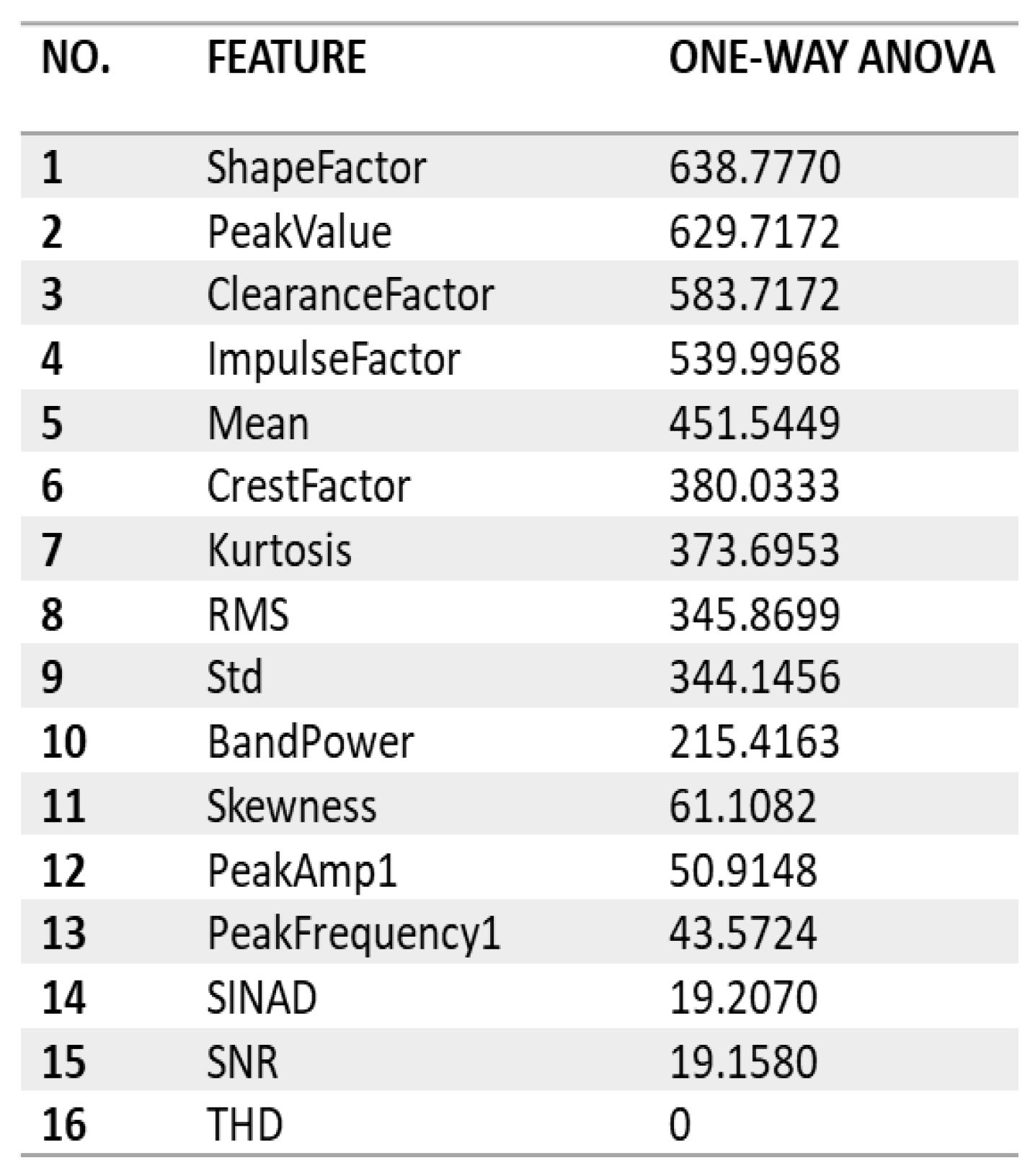
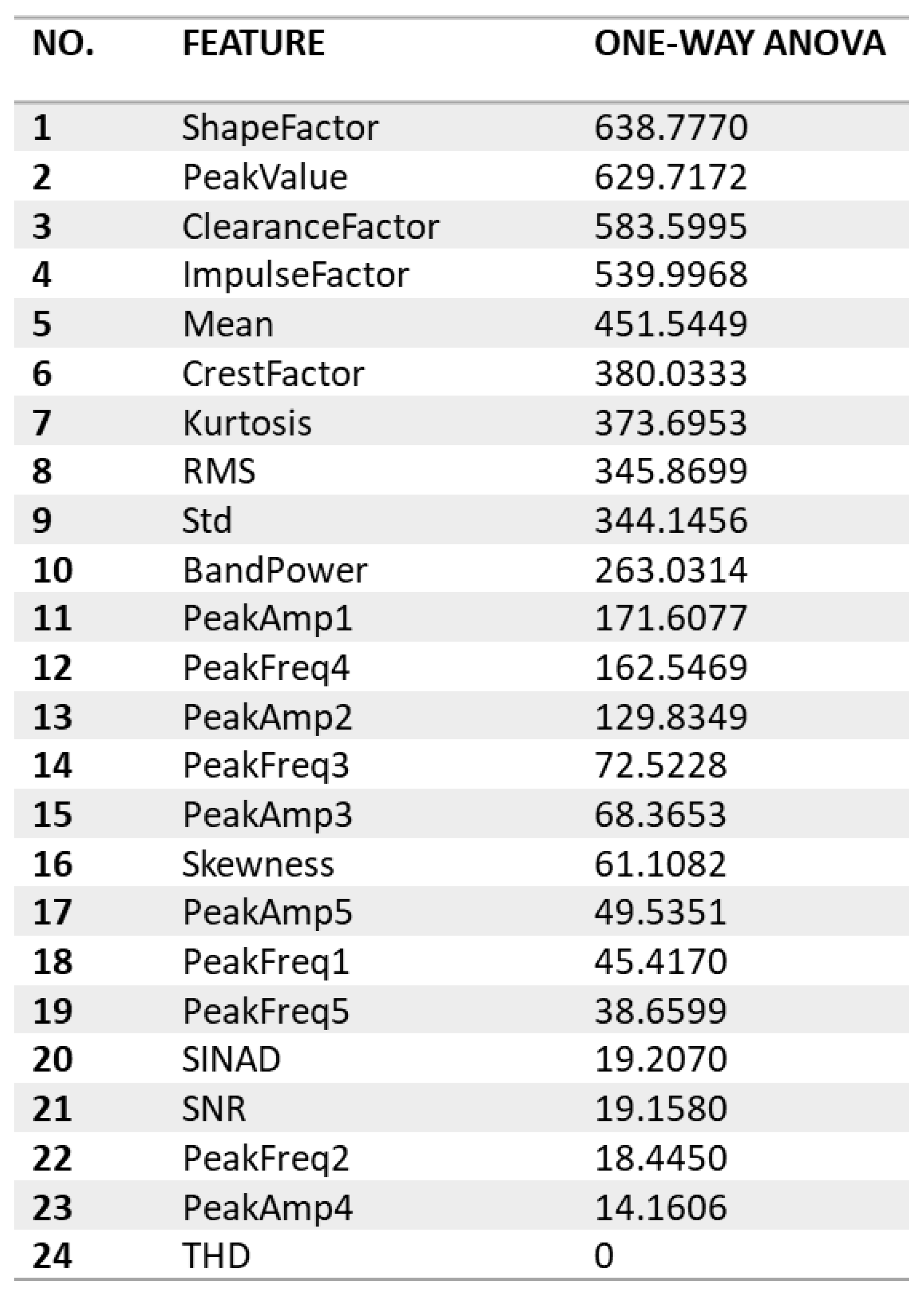
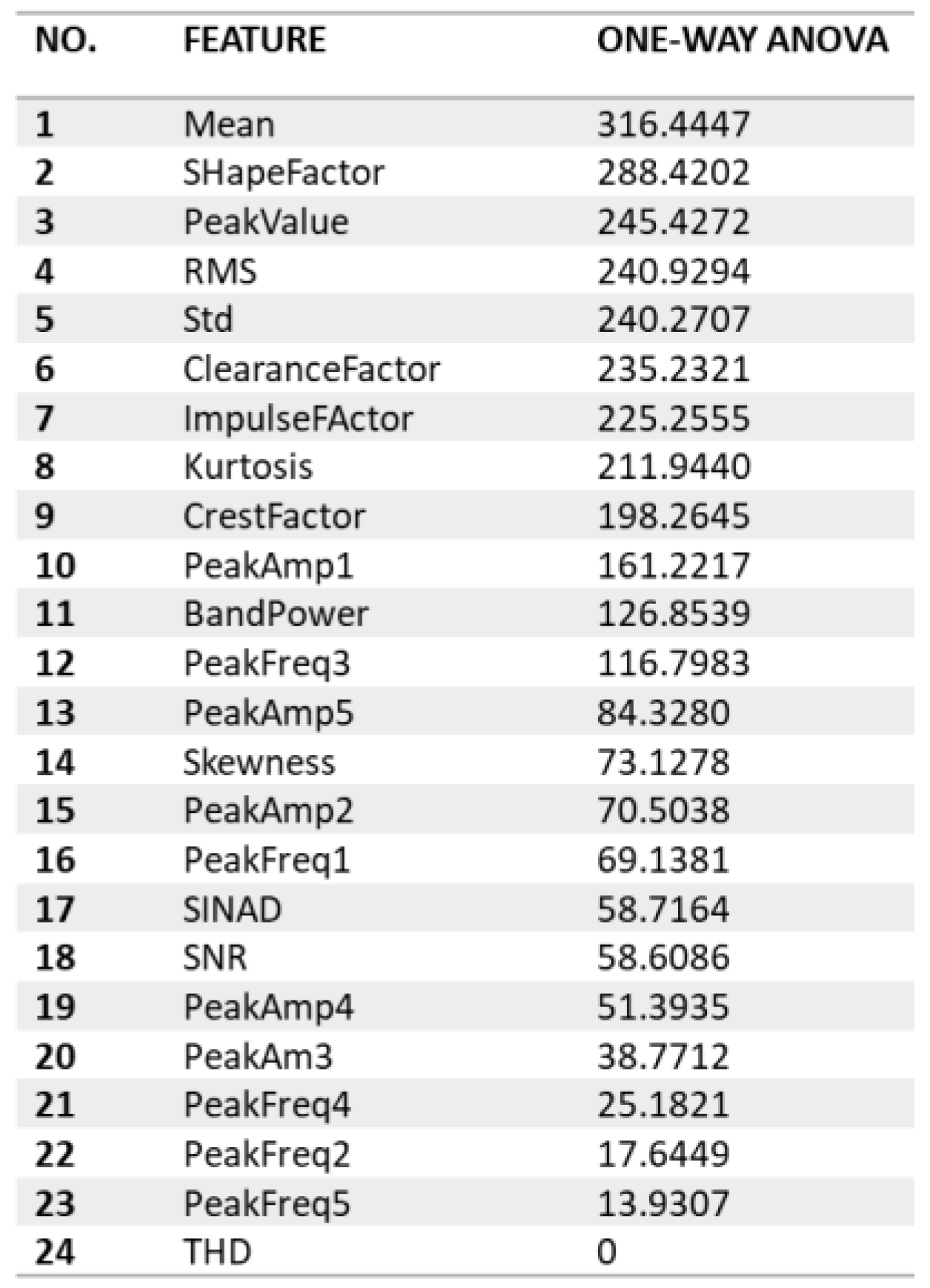
2.2. One-Way Analysis of Variance (ANOVA) Feature Selection
2.3. State-of-The-Art and Research Gaps
3. Methodology
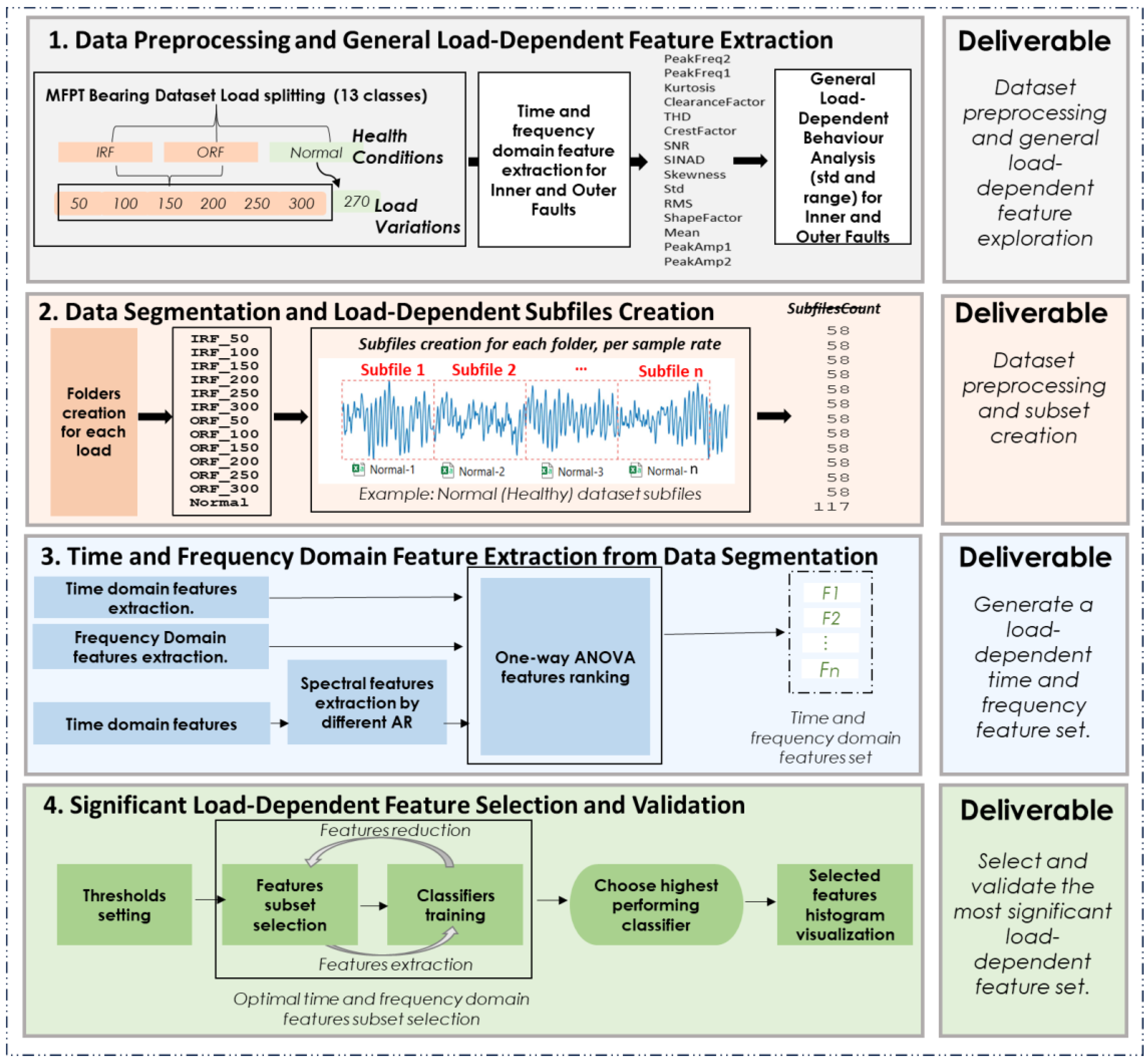
3.1. Phase 1: Time and Frequency Domain Load-Dependent Pattern Analysis
- Data preprocessing and general load-dependent feature extraction: the MFPT-bearing dataset is segmented into smaller, manageable portions, involving the division of the continuous signal into smaller segments stored as separate CSV files.
- Data segmentation and load-dependent subfile creation: time and frequency domain features are extracted from the segmented data, focusing on assessing feature variations during faults and their sensitivity to load changes.
- Time and frequency domain feature extraction from data segmentation: generate a load-dependent time and frequency feature set, where an initial load-dependent feature set is created for use in the following step.
- Significant load-dependent feature selection and validation: select and validate the most significant load-dependent features using an iterative one-way ANOVA approach. Then, validate this feature set by assessing the accuracy of different classifiers.
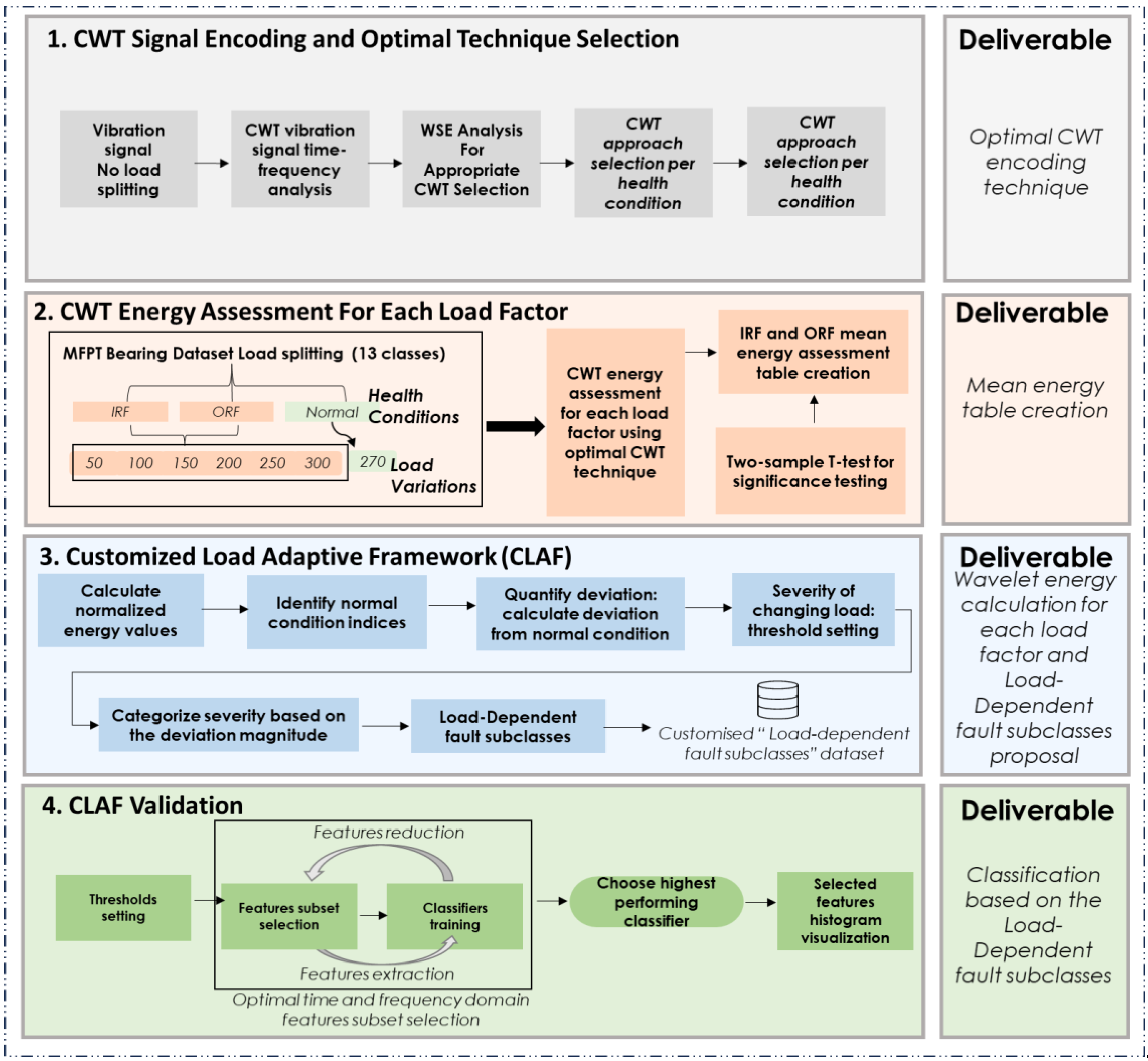
3.2. Phase 2: Customised Load Adaptive Framework (CLAF) for IM Fault Classification
- CWT signal encoding and optimal technique selection: various Continuous Wavelet Transform methods are explored to represent signals concerning fault types, leading to the selection of the most appropriate approach (Amor, Bump, or Morse).
- CWT energy assessment for each load factor: this step involves preprocessing, health condition classification, and categorisation into thirteen classes corresponding to specific load levels. The research calculates Wavelet Singular Entropy and mean energy, providing insights into fault severity and energy distribution.
- Customised Load Adaptive Framework (CLAF): the research proposes load-dependent fault subclasses tailored to assess radial load impact under different conditions, incorporating insights gained from the analysis for a customised evaluation.
- CLAF Validation: we train different classifiers on proposed load-dependent subclasses to examine the classification accuracy of the proposed classes.
3.3. Dataset
4. Results and Discussion
4.1. Phase 1: Radial Load Features Assessment Framework
4.1.1. Step1: Data Preprocessing and General Load-Dependent Feature Extraction
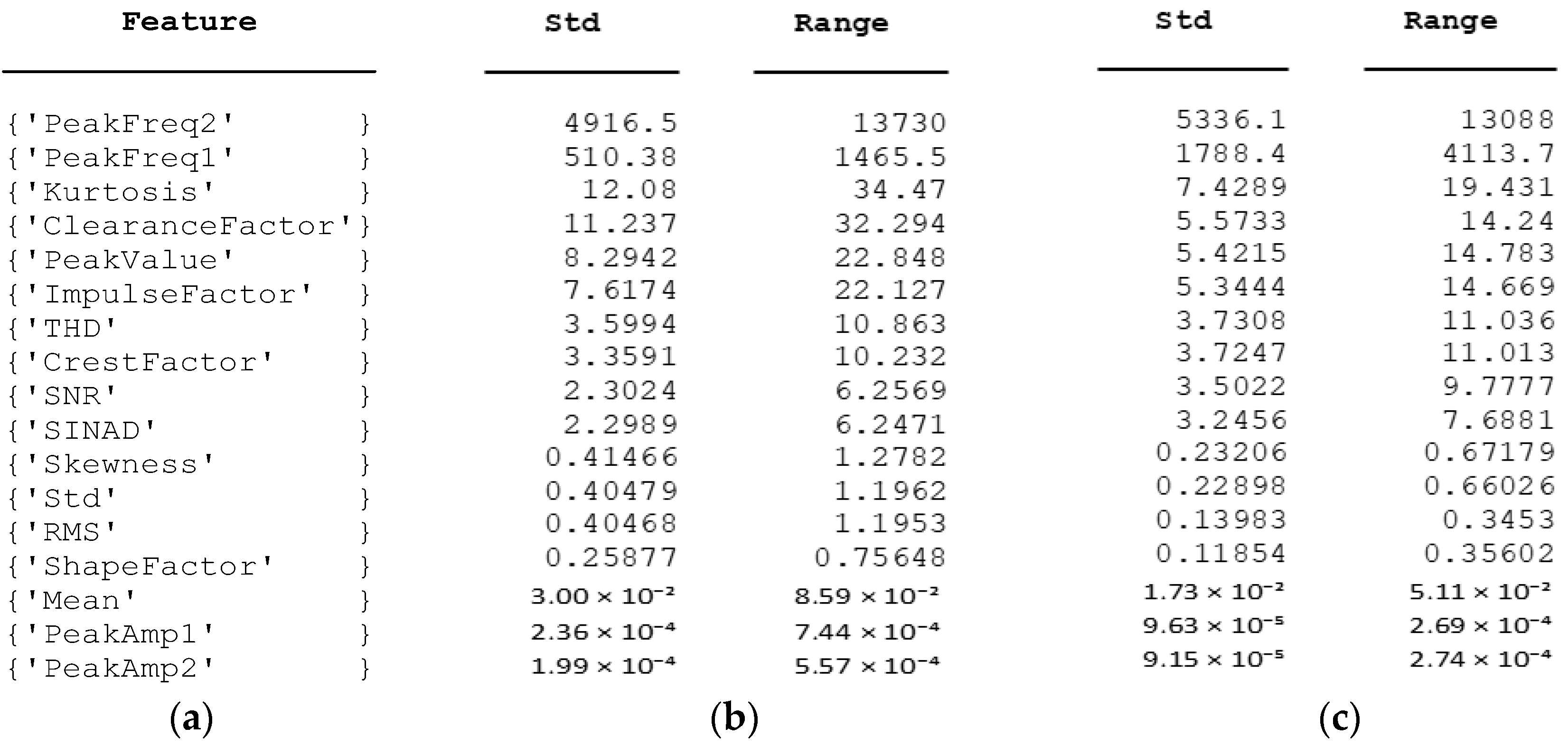
General Load-Dependent Behaviour Analysis
4.1.2. Step2: Data Segmentation and Load-Dependent Subfile Creation
4.1.3. Step3: Time and Frequency Domain Feature Extraction from Data Segmentation
4.1.4. Step 4: Significant Load-Dependent Feature Selection and Validation
- (a)
- Autoregressive (AR) Model: Order Two, Peak = 1
- (b)
- Autoregressive (AR) Model: Order Fifteen, Peak = 5
Summary of Selected Features
4.2. Phase 2: Customised Load Adaptive Framework (CLAF) for IM Fault Classification
4.2.1. Step1: CWT Signal Encoding and Optimal Technique Selection
CWT Vibration Signal Time–Frequency Analysis
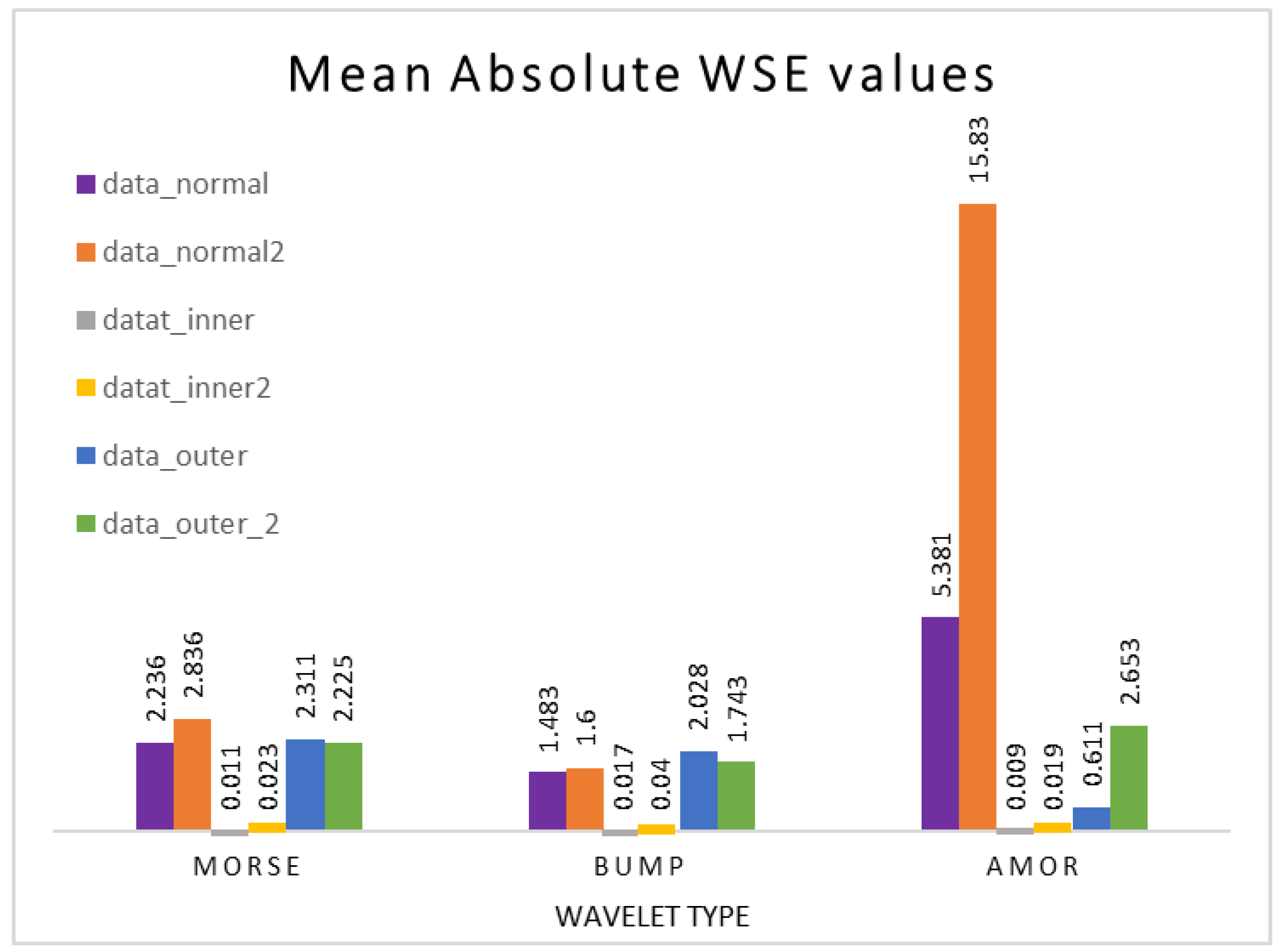
Wavelet Singular Entropy Analysis for Appropriate CWT Selection
- Bump:
- 2.
- Morse:
- 3.
- Amor:
4.2.2. Step 2: CWT Energy Assessment for Each Load Factor
- Extract the vibration signal for load factor i: .
- Perform the CWT on the vibration signal: ; see Equation (8). The scale used in this study was 5.
- Calculate the wavelet energy for each scale j, , in Equation (9):
CWT Energy Assessment for Each Load Factor Using Optimal CWT Technique
Two-Sample t-Test for Significance Testing
4.2.3. Step 3: Customised Load Adaptive Framework
- Calculate normalised energy values
- 2.
- Identify Normal Condition Indices
- 3.
- Quantify deviation: calculate deviation from Normal condition:where deviations fro*m the Normal condition are calculated, highlighting differences between the normalised energy values and the baseline. When a load factor is not within , the corresponding normalised energy value is considered. Otherwise, the deviation is set to zero.
- 4.
- Severity of Changing Load: Threshold Setting
- 4.1
- Define adjustable severity thresholds
- 4.2
- Categorise the severity based on the deviation magnitude and threshold:
Hence, the severity of deviations is categorised to assess the impact post-fault. Adjustable severity thresholds differentiate between ‘Mild’, ‘Moderate’ and ‘Severe’ conditions and then store severity as a cell array value. This step is vital in determining the gravity of the machinery’s response to various fault scenarios, enabling efficient resource allocation, timely interventions, and preventing potential escalations. In this paper, the authors chose the following thresholds, which can be adjusted according to the application: mild_threshold = 0.2; moderate_threshold = 0.5.
- 5.
- Categorise Severity Based on the Deviation Magnitude
- IRF Customised Load Factor Assessment:
- 2.
- ORF-Type Customised Load Factor Assessment:
4.2.4. Step 4: CLAF Validation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Alshorman, O.; Irfan, M.; Saad, N.; Zhen, D.; Haider, N.; Glowacz, A.; Alshorman, A. A Review of Artificial Intelligence Methods for Condition Monitoring and Fault Diagnosis of Rolling Element Bearings for Induction Motor. Shock Vib. 2020, 8843759. [Google Scholar] [CrossRef]
- Cinar, E. A Sensor Fusion Method Using Deep Transfer Learning for Fault Detection in Equipment Condition Monitoring. In Proceedings of the 2022 International Conference on INnovations in Intelligent SysTems and Applications (INISTA), Biarritz, France, 8–12 August 2022; pp. 1–6. [Google Scholar]
- Nemani, V.; Bray, A.; Thelen, A.; Hu, C.; Daining, S. Health Index Construction with Feature Fusion Optimization for Predictive Maintenance of Physical Systems. Struct. Multidiscip. Optim. 2022, 65, 349. [Google Scholar] [CrossRef]
- Ye, L.; Ma, X.; Wen, C. Rotating Machinery Fault Diagnosis Method by Combining Time-Frequency Domain Features and Cnn Knowledge Transfer. Sensors 2021, 21, 8168. [Google Scholar] [CrossRef] [PubMed]
- Resendiz-Ochoa, E.; Osornio-Rios, R.A.; Benitez-Rangel, J.P.; Romero-Troncoso, R.D.J.; Morales-Hernandez, L.A. Induction Motor Failure Analysis: An Automatic Methodology Based on Infrared Imaging. IEEE Access 2018, 6, 76993–77003. [Google Scholar] [CrossRef]
- Silik, A.; Noori, M.; Altabey, W.A.; Ghiasi, R.; Wu, Z. Comparative Analysis of Wavelet Transform for Time-Frequency Analysis and Transient Localization in Structural Health Monitoring. SDHM Struct. Durab. Heal. Monit. 2021, 15, 1–22. [Google Scholar] [CrossRef]
- Iunusova, E.; Gonzalez, M.K.; Szipka, K.; Archenti, A. Early Fault Diagnosis in Rolling Element Bearings: Comparative Analysis of a Knowledge-Based and a Data-Driven Approach. J. Intell. Manuf. 2023. [Google Scholar] [CrossRef]
- Li, J.; Ying, Y.; Ren, Y.; Xu, S.; Bi, D.; Chen, X.; Xu, Y. Research on Rolling Bearing Fault Diagnosis Based on Multi-Dimensional Feature Extraction and Evidence Fusion Theory. R. Soc. Open Sci. 2019, 6, 181488. [Google Scholar] [CrossRef]
- Shi, Z.; Li, Y.; Liu, S. A Review of Fault Diagnosis Methods for Rotating Machinery. In Proceedings of the 2020 IEEE 16th International Conference on Control & Automation (ICCA), Singapore, 9–11 October 2020; pp. 1618–1623. [Google Scholar]
- Zhang, X.; Zhao, B.; Lin, Y. Machine Learning Based Bearing Fault Diagnosis Using the Case Western Reserve University Data: A Review. IEEE Access 2021, 9, 155598–155608. [Google Scholar] [CrossRef]
- Ahmed, H.; Nandi, A.K. Compressive Sampling and Feature Ranking Framework for Bearing Fault Classification With Vibration Signals. IEEE Access 2018, 6, 44731–44746. [Google Scholar] [CrossRef]
- Toma, R.N.; Gao, Y.; Piltan, F.; Im, K.; Shon, D.; Yoon, T.H.; Yoo, D.S.; Kim, J.M. Classification Framework of the Bearing Faults of an Induction Motor Using Wavelet Scattering Transform-Based Features. Sensors 2022, 22, 8958. [Google Scholar] [CrossRef]
- Nayana, B.R.; Geethanjali, P. Improved Identification of Various Conditions of Induction Motor Bearing Faults. IEEE Trans. Instrum. Meas. 2020, 69, 1908–1919. [Google Scholar] [CrossRef]
- Toma, R.N.; Prosvirin, A.E.; Kim, J.M. Bearing Fault Diagnosis of Induction Motors Using a Genetic Algorithm and Machine Learning Classifiers. Sensors (Switzerland) 2020, 20, 1884. [Google Scholar] [CrossRef]
- Martinez-Herrera, A.L.; Ferrucho-Alvarez, E.R.; Ledesma-Carrillo, L.M.; Mata-Chavez, R.I.; Lopez-Ramirez, M.; Cabal-Yepez, E. Multiple Fault Detection in Induction Motors through Homogeneity and Kurtosis Computation. Energies 2022, 15, 1541. [Google Scholar] [CrossRef]
- Yuan, L.; Lian, D.; Kang, X.; Chen, Y.; Zhai, K. Rolling Bearing Fault Diagnosis Based on Convolutional Neural Network and Support Vector Machine. IEEE Access 2020, 8, 137395–137406. [Google Scholar] [CrossRef]
- Hejazi, S.; Packianather, M.; Liu, Y. Novel Preprocessing of Multimodal Condition Monitoring Data for Classifying Induction Motor Faults Using Deep Learning Methods. In Proceedings of the 2022 IEEE 2nd International Symposium on Sustainable Energy, Signal Processing and Cyber Security (iSSSC), Gunupur Odisha, India, 15–17 December 2022; pp. 1–6. [Google Scholar]
- Zhang, H.; Borghesani, P.; Randall, R.B.; Peng, Z. A Benchmark of Measurement Approaches to Track the Natural Evolution of Spall Severity in Rolling Element Bearings. Mech. Syst. Signal Process. 2022, 166, 108466. [Google Scholar] [CrossRef]
- Han, T.; Zhang, L.; Yin, Z.; Tan, A.C.C. Rolling Bearing Fault Diagnosis with Combined Convolutional Neural Networks and Support Vector Machine. Meas. J. Int. Meas. Confed. 2021, 177, 109022. [Google Scholar] [CrossRef]
- Narayan, Y. Hb VsEMG Signal Classification with Time Domain and Frequency Domain Features Using LDA and ANN Classifier Materials Today: Proceedings Hb VsEMG Signal Classification with Time Domain and Frequency Domain Features Using LDA and ANN Classifier. Mater. Today Proc. 2021, 37, 3226–3230. [Google Scholar] [CrossRef]
- Jain, P.H.; Bhosle, S.P. Study of Effects of Radial Load on Vibration of Bearing Using Time-Domain Statistical Parameters. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1070, 012130. [Google Scholar] [CrossRef]
- Jain, P.H.; Bhosle, S.P. Analysis of Vibration Signals Caused by Ball Bearing Defects Using Time-Domain Statistical Indicators. Int. J. Adv. Technol. Eng. Explor. 2022, 9, 700–715. [Google Scholar] [CrossRef]
- Liu, M.K.; Weng, P.Y. Fault Diagnosis of Ball Bearing Elements: A Generic Procedure Based on Time-Frequency Analysis. Meas. Sci. Rev. 2019, 19, 185–194. [Google Scholar] [CrossRef]
- Pinedo-Sánchez, L.A.; Mercado-Ravell, D.A.; Carballo-Monsivais, C.A. Vibration Analysis in Bearings for Failure Prevention Using CNN. J. Brazilian Soc. Mech. Sci. Eng. 2020, 42, 628. [Google Scholar] [CrossRef]
- Granados-Lieberman, D.; Huerta-Rosales, J.R.; Gonzalez-Cordoba, J.L.; Amezquita-Sanchez, J.P.; Valtierra-Rodriguez, M.; Camarena-Martinez, D. Time-Frequency Analysis and Neural Networks for Detecting Short-Circuited Turns in Transformers in Both Transient and Steady-State Regimes Using Vibration Signals. Appl. Sci. 2023, 13, 12218. [Google Scholar] [CrossRef]
- Tian, B.; Fan, X.; Xu, Z.; Wang, Z.; Du, H. Finite Element Simulation on Transformer Vibration Characteristics under Typical Mechanical Faults. In Proceedings of the 9th International Conference on Power Electronics Systems and Applications, (PESA 2022), Hong Kong, China, 20–22 September 2022; pp. 1–4. [Google Scholar] [CrossRef]
- Kumar, V.; Mukherjee, S.; Verma, A.K.; Sarangi, S. An AI-Based Nonparametric Filter Approach for Gearbox Fault Diagnosis. IEEE Trans. Instrum. Meas. 2022, 71, 351661. [Google Scholar] [CrossRef]
- MathWorks Analyze and Select Features for Pump Diagnostics. Available online: https://www.mathworks.com/help/predmaint/ug/analyze-and-select-features-for-pump-diagnostics.html (accessed on 27 November 2023).
- Hu, L.; Zhang, Z. EEG Signal Processing and Feature Extraction; Hu, L., Zhang, Z., Eds.; Springer Singapore: Singapore, 2019; ISBN 978-981-13-9112-5. [Google Scholar]
- Metwally, M.; Hassan, M.M.; Hassaan, G. Diagnosis of Rotating Machines Faults Using Artificial Intelligence Based on Preprocessing for Input Data. In Proceedings of the 26th IEEE Conference of Open Innovations Association FRUCT (FRUCT26), Yaroslavl, Russia, 23–25 April 2020. [Google Scholar]
- Djemili, I.; Medoued, A.; Soufi, Y. A Wind Turbine Bearing Fault Detection Method Based on Improved CEEMDAN and AR-MEDA. J. Vib. Eng. Technol. 2023, 1–22. [Google Scholar] [CrossRef]
- He, Z.; Fu, L.; Lin, S.; Bo, Z. Fault Detection and Classification in EHV Transmission Line Based on Wavelet Singular Entropy. IEEE Trans. Power Deliv. 2010, 25, 2156–2163. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, S.; Qiu, L.; Zhang, Y.; Wang, Y.; Wang, Z.; Yang, G. A Remaining Useful Life Prediction Method Based on Time–Frequency Images of the Mechanical Vibration Signals. Sci. Rep. 2022, 12, 17887. [Google Scholar] [CrossRef]
- Kaji, M.; Parvizian, J.; van de Venn, H.W. Constructing a Reliable Health Indicator for Bearings Using Convolutional Autoencoder and Continuous Wavelet Transform. Appl. Sci. 2020, 10, 8948. [Google Scholar] [CrossRef]
- Amanollah, H.; Asghari, A.; Mashayekhi, M. Damage Detection of Structures Based on Wavelet Analysis Using Improved AlexNet. Structures 2023, 56, 105019. [Google Scholar] [CrossRef]
- Zhang, Y.; Guo, H.; Zhou, Y.; Xu, C.; Liao, Y. Recognising Drivers’ Mental Fatigue Based on EEG Multi-Dimensional Feature Selection and Fusion. Biomed. Signal Process. Control 2023, 79, 104237. [Google Scholar] [CrossRef]
- Suresh, S.; Naidu, V.P.S. Mahalanobis-ANOVA Criterion for Optimum Feature Subset Selection in Multi-Class Planetary Gear Fault Diagnosis. JVC/Journal Vib. Control 2022, 28, 3257–3268. [Google Scholar] [CrossRef]
- Alharbi, A.H.; Towfek, S.K.; Abdelhamid, A.A.; Ibrahim, A.; Eid, M.M.; Khafaga, D.S.; Khodadadi, N.; Abualigah, L.; Saber, M. Diagnosis of Monkeypox Disease Using Transfer Learning and Binary Advanced Dipper Throated Optimization Algorithm. Biomimetics 2023, 8, 313. [Google Scholar] [CrossRef]
- Sayyad, S.; Kumar, S.; Bongale, A.; Kamat, P.; Patil, S.; Kotecha, K. Data-Driven Remaining Useful Life Estimation for Milling Process: Sensors, Algorithms, Datasets, and Future Directions. IEEE Access 2021, 9, 110255–110286. [Google Scholar] [CrossRef]
- Toma, R.N.; Toma, F.H.; Kim, J. Comparative Analysis of Continuous Wavelet Transforms on Vibration Signal in Bearing Fault Diagnosis of Induction Motor. In Proceedings of the 2021 International Conference on Electronics, Communications and Information Technology (ICECIT), Khulna, Bangladesh, 14–16 September 2021; pp. 1–4. [Google Scholar]
- Guo, T.; Zhang, T.; Lim, E.; Lopez-Benitez, M.; Ma, F.; Yu, L. A Review of Wavelet Analysis and Its Applications: Challenges and Opportunities. IEEE Access 2022, 10, 58869–58903. [Google Scholar] [CrossRef]
- Ozaltin, O.; Yeniay, O. A Novel Proposed CNN–SVM Architecture for ECG Scalograms Classification. Soft Comput. 2023, 27, 4639–4658. [Google Scholar] [CrossRef]
- Li, D.; Cao, M.; Deng, T.; Zhang, S. Wavelet Packet Singular Entropy-Based Method for Damage Identification in Curved Continuous Girder Bridges under Seismic Excitations. Sensors (Switzerland) 2019, 19, 4272. [Google Scholar] [CrossRef] [PubMed]
- Jayamaha, D.K.J.S.; Lidula, N.W.A.; Rajapakse, A.D. Wavelet-Multi Resolution Analysis Based ANN Architecture for Fault Detection and Localization in DC Microgrids. IEEE Access 2019, 7, 145371–145384. [Google Scholar] [CrossRef]
- Wu, C.; Yang, K.; Ni, J.; Lu, S.; Yao, L.; Li, X. Investigations for Vibration and Friction Torque Behaviors of Thrust Ball Bearing with Self-Driven Textured Guiding Surface. Friction 2023, 11, 894–910. [Google Scholar] [CrossRef]
- Ambrożkiewicz, B.; Syta, A.; Georgiadis, A.; Gassner, A.; Litak, G.; Meier, N. Intelligent Diagnostics of Radial Internal Clearance in Ball Bearings with Machine Learning Methods. Sensors 2023, 23, 5875. [Google Scholar] [CrossRef]
- Yang, F.; Song, M.; Ma, X.; Guo, N.; Xue, Y. Research on H7006C Angular Contact Ball Bearing Slipping Behavior under Operating Conditions. Lubricants 2023, 11, 298. [Google Scholar] [CrossRef]
- Bechhoefer, E. A Quick Introduction to Bearing Envelope Analysis. J. Chem. Inf. Model. 2016, 53, 1–10. [Google Scholar]
- Bechhoefer, E. Condition Based Maintenance Fault Database for Testing of Diagnostic and Prognostics Algorithms. Available online: https://www.mfpt.org/fault-data-sets/ (accessed on 30 October 2023).













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Formula | Description |
|---|---|---|
| Peak or Max | The highest amplitude value is observed within a given signal or dataset. | |
| Root Mean Square (RMS) | Gives a measure of the magnitude of the signal. | |
| Skewness | Measures the asymmetry of the distribution about the mean. | |
| Standard deviation (std) | The square root of the variance represents the average deviation from the mean. | |
| Kurtosis | Indicates the “tailedness” of the distribution. A high kurtosis might indicate the presence of outliers or impulses in the signal. | |
| Crest Factor | The ratio of the peak amplitude to its RMS value indicates the relative sharpness of peaks. | |
| Peak to Peak | Difference between the maximum and minimum values of the signal. | |
| Impulse Factor | Highlights the impulsive behaviours indicative of machinery faults. |
| Parameter | Formula | Description | |
|---|---|---|---|
| Harmonic Features | THD | Frequency domain, measuring the distortion caused by harmonics in the signal. | |
| SNR | Compares the level of a desired signal to the level of background noise. | ||
| SINAD | A measure of signal quality compares the level of desired signal to the level of background noise and harmonics. | ||
| Spectral Features | Peak amplitude | Represents the highest point (or peak) of the signal’s waveform when viewed in the frequency domain. | |
| Peak frequency | Corresponds to the frequency component that is most prominent or dominant in the signal. | ||
| Band power | Quantifies the total energy within a specific frequency range, providing insights into the distribution of signal energy across the spectrum. | ||
| Inner Fault Dataset | Code | Load (lbs/kg) | Sampling Rate (Hz) | Duration (s) |
|---|---|---|---|---|
| baseline_2 | data_normal | 270/122.47 | 97,656 | 6 |
| InnerRaceFault_vload_2 | IRF_50 | 50/22.68 | 48,828 | 3 |
| InnerRaceFault_vload_3 | IRF_100 | 100/45.36 | 48,828 | 3 |
| InnerRaceFault_vload_4 | IRF_150 | 150/68.04 | 48,828 | 3 |
| InnerRaceFault_vload_5 | IRF_200 | 200/90.72 | 48,828 | 3 |
| InnerRaceFault_vload_6 | IRF_250 | 250/113.40 | 48,828 | 3 |
| InnerRaceFault_vload_7 | IRF_300 | 300/136.08 | 48,828 | 3 |
| Outer Fault Dataset | Code | Load (lbs/kg) | Sampling Rate (Hz) | Duration (s) |
|---|---|---|---|---|
| baseline_2 | data_normal | 270/122.47 | 97,656 | 6 |
| OuterRaceFault_vload_2 | ORF_50 | 50/22.68 | 48,828 | 3 |
| OuterRaceFault_vload_3 | ORF_100 | 100/45.36 | 48,828 | 3 |
| OuterRaceFault_vload_4 | ORF_150 | 150/68.04 | 48,828 | 3 |
| OuterRaceFault_vload_5 | ORF_200 | 200/90.72 | 48,828 | 3 |
| OuterRaceFault_vload_6 | ORF_250 | 250/113.40 | 48,828 | 3 |
| OuterRaceFault_vload_7 | ORF_300 | 300/136.08 | 48,828 | 3 |
| LoadFactor (lbs) | Clearance Factor | Crest Factor | Impulse Factor | Kurtosis | Mean | Peak Value | RMS | Shape Factor | Skewness | Std | SINAD * | SNR * | THD * |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 50 | 40.04 | 15.462 | 28.69 | 27.97 | −0.22 | 27.50 | 1.78 | 1.86 | 0.62 | 1.76 | −21.32 | −21.307 | −5.36 |
| 100 | 37.30 | 14.488 | 26.96 | 30.53 | −0.22 | 26.59 | 1.84 | 1.86 | 0.87 | 1.82 | −21.05 | −21.027 | −0.53 |
| 150 | 33.30 | 13.249 | 24.31 | 33.13 | −0.22 | 23.06 | 1.74 | 1.84 | 1.28 | 1.72 | −19.05 | −19.046 | −10.06 |
| 200 | 38.15 | 13.537 | 26.92 | 37.28 | −0.21 | 27.38 | 2.02 | 1.99 | 1.15 | 2.01 | −18.22 | −18.208 | −6.31 |
| 250 | 37.52 | 13.022 | 26.18 | 37.49 | −0.20 | 27.14 | 2.08 | 2.01 | 0.72 | 2.08 | −17.70 | −17.684 | −5.46 |
| 300 | 35.24 | 12.998 | 25.17 | 35.30 | −0.19 | 25.58 | 1.97 | 1.94 | 0.68 | 1.96 | −17.35 | −17.341 | −8.41 |
| 270 ** | 7.75 | 5.230 | 6.56 | 3.02 | −0.14 | 4.65 | 0.89 | 1.25 | 0.00 | 0.88 | −23.60 | −23.598 | −11.39 |
| LoadFactor (lbs) | Clearance Factor | Crest Factor | Impulse Factor | Kurtosis | Mean | Peak Value | RMS | Shape Factor | Skewness | Std | SINAD * | SNR * | THD * |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 50 | 10.26 | 6.39 | 8.48 | 5.09 | −0.19 | 6.35 | 0.99 | 1.33 | 0.04 | 0.98 | −14.41 | −14.40 | −11.97 |
| 100 | 9.15 | 5.84 | 7.62 | 4.40 | −0.18 | 4.93 | 0.84 | 1.31 | −0.01 | 0.82 | −13.15 | −13.12 | −9.06 |
| 150 | 9.54 | 6.10 | 7.94 | 4.04 | −0.18 | 5.21 | 0.85 | 1.30 | −0.04 | 0.83 | −12.59 | −12.56 | −9.934 |
| 200 | 21.81 | 12.46 | 17.67 | 11.90 | −0.17 | 12.28 | 0.99 | 1.42 | 0.31 | 0.97 | −17.54 | −17.52 | −5.54 |
| 250 | 15.03 | 9.07 | 12.30 | 6.59 | −0.16 | 8.66 | 0.96 | 1.36 | 0.12 | 0.94 | −16.09 | −16.06 | −4.92 |
| 300 | 27.18 | 12.92 | 20.80 | 17.69 | −0.16 | 19.43 | 1.50 | 1.61 | 0.27 | 1.50 | −15.10 | −15.10 | −14.69 |
| 270 ** | 7.75 | 5.23 | 6.56 | 3.02 | −0.14 | 4.65 | 0.89 | 1.25 | 0.01 | 0.88 | −23.60 | −23.60 | −11.39 |
| LoadFactor | PeakAmp1 | PeakAmp2 | PeakFreq1 | PeakFreq2 | BandPower | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| Inner | Outer | Inner | Outer | Inner | Outer | Inner | Outer | Inner | Outer | |
| 50 | 0.00034 | 0.000109 | 0.00031 | 0.000093 | 4363.937 | 1413.267 | 13,991.090 | 14,179.042 | 1.474 | 0.454 |
| 100 | 0.00046 | 0.000075 | 0.00012 | 0.000028 | 4256.059 | 1379.739 | 13,968.668 | 14,258.280 | 1.476 | 0.322 |
| 150 | 0.00046 | 0.000080 | 0.00005 | 0.000036 | 4191.394 | 1377.111 | 14,127.206 | 14,462.995 | 1.330 | 0.327 |
| 200 | 0.00031 | 0.000063 | 0.00011 | 0.000058 | 4025.383 | 4947.698 | 10,622.786 | 1391.188 | 1.663 | 0.461 |
| 250 | 0.00061 | 0.000058 | 0.00009 | 0.000049 | 4124.988 | 1621.552 | 10,365.553 | 5212.034 | 1.807 | 0.430 |
| 300 | 0.00077 | 0.000302 | 0.00058 | 0.000296 | 4081.332 | 2915.517 | 748.668 | 11,675.566 | 1.618 | 1.101 |
| Normal 270 | 0.00003 | 0.000028 | 0.00003 | 0.000028 | 5490.855 | 5490.855 | 14,478.764 | 14,478.764 | 0.279 | 0.302 |
| Dataset Segmentation | CSV Files | Code | Load Factor | Subfiles Count |
|---|---|---|---|---|
Example on baseline (Normal) with Matlab code. The segment is based on ratio, i.e., each segment in inner and outer fault contains 2500 samples, and each sample in Normal condition contains 5000 data points.   |  | IRF_50 | {‘IRF−50’} | 58 |
| IRF_100 | {‘IRF−100’} | 58 | ||
| IRF_150 | {‘IRF−150’} | 58 | ||
| IRF_200 | {‘IRF−200’} | 58 | ||
| IRF_250 | {‘IRF−250’} | 58 | ||
| IRF_300 | {‘IRF−300’} | 58 | ||
| ORF_50 | {‘ORF−50’ } | 58 | ||
| ORF_100 | {‘ORF−100’ } | 58 | ||
| ORF_150 | {‘ORF−150’} | 58 | ||
| ORF_200 | {‘ORF−200’} | 58 | ||
| ORF_250 | {‘ORF−250’} | 58 | ||
| ORF_300 | {‘ORF−300’} | 58 | ||
| Normal | {‘Normal’} | 117 |
| No. of Features Used in Classifier Training | Classifier Name | Accuracy Score on the Testing Dataset |
|---|---|---|
| Top 13 >20 | Boosted Trees | 74.1% |
| Top 8 >345 | Narrow Neural Network | 72.8% |
| Top 7 >373 | Bilayered Neural Network | 73.5% |
| Top 2 >629 | Fine Gaussian SVM | 59.9% |
| Number of Selected Features from ANOVA Ranking | Classifier | Accuracy Score on the Testing Dataset |
|---|---|---|
| Top 19 >20 | Bagged trees | 86.4% |
| Top 14 >72 | Cubic SVM | 86.4% |
| Top 13 >129 | Quadratic SVM | 83.3% |
| Top 11 >171 | Quadratic Discriminant | 84.6% |
| Top 8 >345 | Quadratic SVM | 76.5% |
| Load Factor Color Code Legend for the Top 14 Features Ranked by One-Way ANOVA | |||
|---|---|---|---|
 | |||
| Features (ANOVA Rank) | Features Histogram | Features (ANOVA Rank) | Features Histogram |
| 1. Shape Factor |  | 2. Peak Value |  |
| 3. ClearanceFactor |  | 4. ImpulseFactor |  |
| Mean |  | 6. CrestFactor |  |
| 7. Kurtosis |  | 8. RMS |  |
| 9. Standard deviation |  | 10. Band Power |  |
| 11. Peak Amplitude1 |  | 12. Peak Frequency4 |  |
| 13. Peak Amplitude 2 |  | 14. PeakFrequency3 |  |
| Health State | Inner | Outter | Normal |
|---|---|---|---|
| Dataset | InnerRaceFault_vload_1 | ‘OuterRaceFault_3.mat’ | ‘baseline_1.mat’ |
| 2D time-frequency diagrams | |||
| Bump |  | ||
| Morse |  | ||
| Amor |  | ||
| Health State | Training Set | Code | Morse | Bump | Amor |
|---|---|---|---|---|---|
| Normal | baseline_1 | data_normal | 2.236 | 1.483 | 5.381 |
| baseline_2 | data_normal2 | 2.836 | 1.600 | 15.830 | |
| WSE Avg. for 0.1 s | 2.536 | 1.541 | 10.603 | ||
| Inner | InnerRaceFault_vload_1 | datat_inner | 0.011 | 0.017 | 0.009 |
| InnerRaceFault_vload_2 | datat_inner2 | 0.023 | 0.040 | 0.019 | |
| WSE Avg. for 0.1 s | 0.017 | 0.028 | 0.014 | ||
| Outer | OuterRaceFault_3 | data_outer | 2.311 | 2.028 | 0.611 |
| OuterRaceFault_1 | data_outer_2 | 2.225 | 1.743 | 2.653 | |
| WSE Avg. for 0.1 s | 2.268 | 1.886 | 1.632 | ||
| Inner Race Fault Type | Outer Race Fault Type | |||
|---|---|---|---|---|
| Load Factor (lbs) | MeanEnergy | Mean Energy Increase % | MeanEnergy | Mean Energy Increase % |
| 50 | 25.549 | 347.70% | 7.699 | 35.16% |
| 100 | 27.547 | 383.65% | 5.431 | 4.76% |
| 150 | 24.915 | 337.68% | 5.573 | 2.08% |
| 200 | 33.742 | 491.88% | 7.604 | 33.35% |
| 250 | 36.147 | 533.49% | 7.178 | 25.90% |
| 270 | 5.7012 | 0% (baseline) | 5.701 | 0% (baseline) |
| 300 | 32.199 | 464.25% | 18.612 | 226.88% |
| LoadFactor (lb) | Mean Energy | NormalizedEnergy | Deviation | Load-Dependent Subclasses | ||||
|---|---|---|---|---|---|---|---|---|
| Fault Type | Inner | Outer | Inner | Outer | Inner | Outer | Inner | Outer |
| 50 | 25.549 | 7.6992 | 0.14035 | 0.05758 | 0.1403 | 0.05758 | {‘Mild’} | {‘Mild’} |
| 100 | 27.547 | 5.4309 | 0.15053 | 0.023062 | 0.15053 | 0.023062 | {‘Mild’} | {‘Mild’} |
| 150 | 24.915 | 5.5728 | 0.14063 | 0.031372 | 0.14063 | 0.031372 | {‘Mild’} | {‘Mild’} |
| 200 | 33.742 | 7.6036 | 0.28444 | 0.092816 | 0.28444 | 0.092816 | {‘Moderate’} | {‘Mild’} |
| 250 | 36.147 | 7.1779 | 0.29911 | 0.061822 | 0.29911 | 0.061822 | {‘Moderate’} | {‘Mild’} |
| 270 | 5.7012 | 5.7012 | 0.00930 | 0.027659 | 0 | 0 | {‘Normal’} | {‘Normal’} |
| 300 | 32.199 | 18.612 | 0.23412 | 0.89814 | 0.23412 | 0.89814 | {‘Moderate’} | {‘Severe’} |
| Classifier | ANOVA Ranking | TTime 1 | Validation Dataset | Testing Dataset | ||||
|---|---|---|---|---|---|---|---|---|
| (s) | VA 2 | NA 3 | MA 4 | MoA 5 | SA 6 | Overall Accuracy | ||
| RUSBoostedTrees | Top 20 >26 | 11.539 | 92.6% | 100% | 92.4% | 91.2% | 100% | 93.8% |
| Fine Tree | Top 17 >58.6 | 4.393 | 92.6% | 100% | 95.7% | 82.4% | 100% | 93.8% |
| Wide neural network | Top 10 >161 | 18.155 | 91.2% | 100% | 97.8% | 88.2% | 100% | 96.3% |
| Cubic SVM | Top7 (a) >215 | 8.1055 | 93.1% | 100% | 96.7% | 82.4% | 100% | 94.4% |
| Medium Gaussian SVM | Top 7 (b) | 5.8059 | 91.6% | 100% | 96.7% | 82.4% | 100% | 94.4% |
| Fine Gaussian SVM | Top 5 >240 | 12.711 | 92.9% | 100% | 97.8% | 82.4% | 100% | 95.1% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hejazi, S.Z.; Packianather, M.; Liu, Y. A Novel Customised Load Adaptive Framework for Induction Motor Fault Classification Utilising MFPT Bearing Dataset. Machines 2024, 12, 44. https://doi.org/10.3390/machines12010044
Hejazi SZ, Packianather M, Liu Y. A Novel Customised Load Adaptive Framework for Induction Motor Fault Classification Utilising MFPT Bearing Dataset. Machines. 2024; 12(1):44. https://doi.org/10.3390/machines12010044
Chicago/Turabian StyleHejazi, Shahd Ziad, Michael Packianather, and Ying Liu. 2024. "A Novel Customised Load Adaptive Framework for Induction Motor Fault Classification Utilising MFPT Bearing Dataset" Machines 12, no. 1: 44. https://doi.org/10.3390/machines12010044
APA StyleHejazi, S. Z., Packianather, M., & Liu, Y. (2024). A Novel Customised Load Adaptive Framework for Induction Motor Fault Classification Utilising MFPT Bearing Dataset. Machines, 12(1), 44. https://doi.org/10.3390/machines12010044