
A Review on Wearable Product Design and Applications



Abstract
:1. Introduction
2. State of the Art
2.1. Three-Dimensional (3D) Printing Technologies
2.1.1. Aesthetics
2.1.2. Technology
2.2. Anthropometric
2.2.1. Prototyping
2.2.2. Measurement
2.3. Computational Design
2.3.1. Design Advancements
2.3.2. Health-Based Applications
2.4. Human Body Kinematics
2.5. Footwear
2.6. Health and Safety
2.6.1. Equipment Design
2.6.2. Social Care Technology
2.7. Smart Textiles
2.7.1. Textile Sensor
2.7.2. Applications
2.8. Athletics
3. Summary of Key Research Areas Depicted
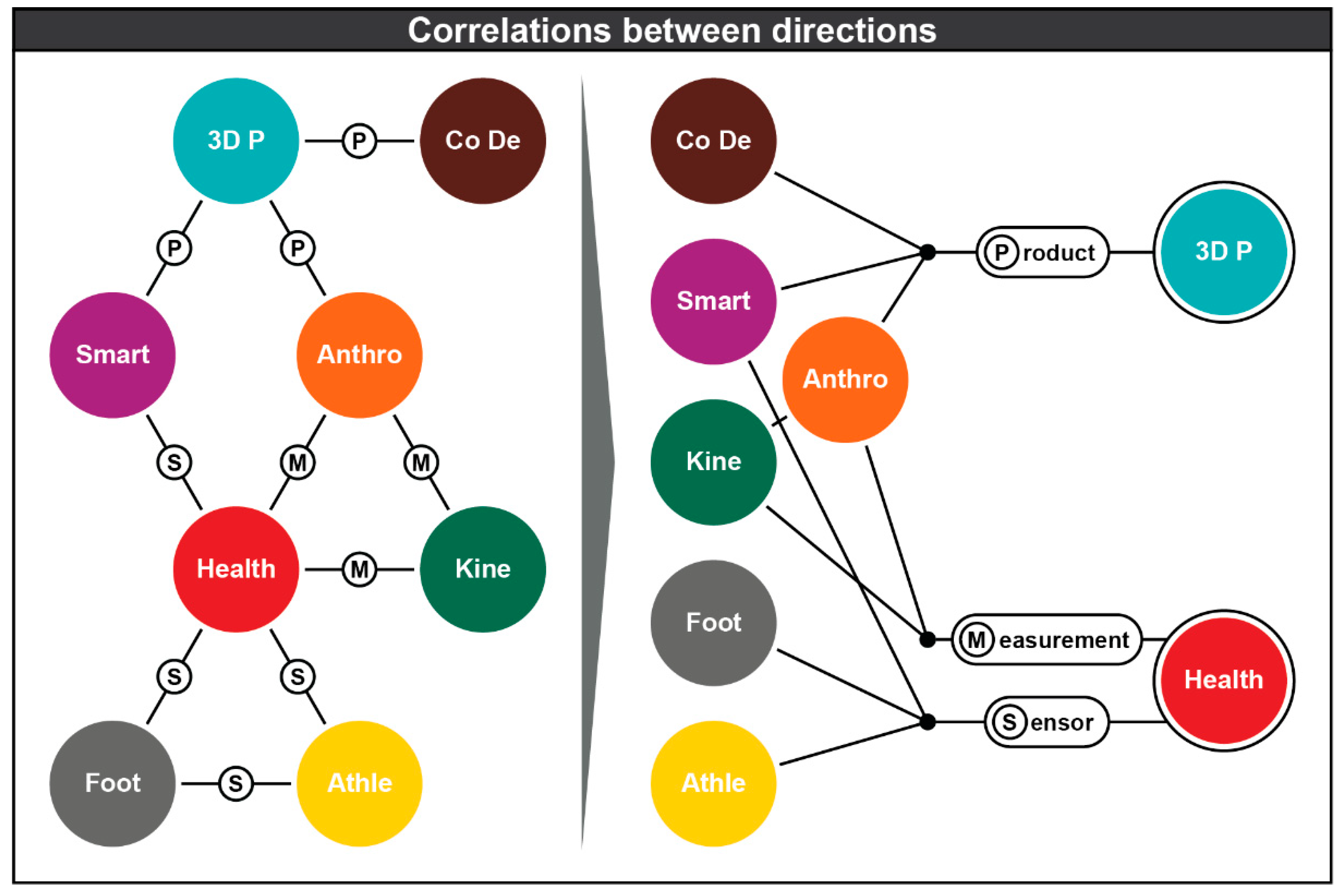
- The phrase Auxiliary tool was associated with a number of categories presented, i.e., Anthropometric (Anthro), Human Body Kinematics (Kine) and Health and Safety (Health).
- Body measurement was mainly included in Anthropometric (Anthro) and Computational Design (Co De) areas.
- Robotic technology was linked with the Human Body Kinematics (Kine) research area.
- Sensors were very popular in most of the categories depicted, i.e., 3D Printing (3D P), Anthropometric (Anthro), Health and Safety (Health) and especially in Smart Textiles (Smart) and Athletics (Athle).
- Sensor systems received recognition when applied to Footwear (Foot), Health and Safety (Health) and Athletics (Athle).
- More emphasis could be given in using 3D pattern and 3D/4D printing in all the categories studied.
- The categories: Human Body Kinematics (Kine), Footwear (Foot), Health and Safety (Health), Smart Textiles (Smart) and Athletics (Athle) presented low connectivity with the keywords: body measurement, measurement optimization, metamaterial and parametric design.
- Research opportunities could be related in connecting Computational Design (Co De) with a series of keywords, i.e., measurement optimization, metamaterial, robotic technology, sensor, sensor system and triboelectric.
- 3D Printing Technologies (3D P) are strongly associated with Computational Design (Co De), Smart Textiles (Smart) and Anthropometric (Anthro) via the design of products (P).
- Health and Safety (Health) is strongly associated with measurements (M) related to Antropometric (Anthro) and Human Body Kinematics (Kine).
- Health and Safety (Health) has strong links with Smart Textiles (Smart), Footwear (Foot) and Athletics (Athle) via the use of sensors (S).
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Vijayan, V.; Connolly, J.; Condell, J.; McKelvey, N.; Gardiner, P. Review of Wearable Devices and Data Collection Considerations for Connected Health. Sensors 2021, 21, 5589. [Google Scholar] [CrossRef] [PubMed]
- Pitzalis, R.F.; Park, D.; Caldwell, D.G.; Berselli, G.; Ortiz, J.F. State of the Art in Wearable Wrist Exoskeletons Part I: Background Needs and Design Requirements. Machines 2023, 11, 458. [Google Scholar] [CrossRef]
- Rogers, J.A.; Someya, T.; Huang, Y. Materials and Mechanics for Stretchable Electronics. Science 2010, 327, 1603–1607. [Google Scholar] [CrossRef] [PubMed]
- Xu, S.; Zhang, Y.; Jia, L.; Mathewson, K.E.; Jang, K.-I.; Kim, J.; Fu, H.; Huang, X.; Chava, P.; Wang, R.; et al. Soft Microfluidic Assemblies of Sensors, Circuits and Radios for the Skin. Science 2014, 344, 70–74. [Google Scholar] [CrossRef] [PubMed]
- Templier, M.; Paré, G. A Framework for Guiding and Evaluating Literature Reviews. Commun. Assoc. Inf. Syst. 2015, 37, 112–137. [Google Scholar] [CrossRef]
- Yap, Y.L.; Yeong, W.Y. Lifestyle Product via 3D Printing: Wearable Fashion. In Proceedings of the 1st International Conference on Progress in Additive Manufacturing, Pro-AM 2014, Singapore, 26–28 May 2014; Volume 1, pp. 393–398. [Google Scholar]
- Pei, E.; Shen, J.; Watling, J. Direct 3D Printing of Polymers onto Textiles: Experimental Studies and Applications. Rapid Prototyp. J. 2015, 21, 556–571. [Google Scholar] [CrossRef]
- Cui, T.; Chattaraman, V.; Sun, L. Examining Consumers’ Perceptions of a 3D Printing Integrated Apparel: A Functional, Expressive and Aesthetic (FEA) Perspective. J. Fash. Mark. Manag. 2022, 26, 266–288. [Google Scholar] [CrossRef]
- Yu, M.; Kim, D.E. The Development of Dress Forms in Standing and Sitting Postures Using 3D Body Scanning and Printing. Fash. Text. 2023, 10, 1–25. [Google Scholar] [CrossRef]
- Lee, S.K.; Koo, S. Development of Three-Dimensional Printed Cultural Fashion Products Using Symbols of Longevity. Text. Res. J. 2022, 92, 4484–4500. [Google Scholar] [CrossRef]
- Valtas, A.; Sun, D. 3D Printing for Garments Production: An Exploratory Study. J. Fash. Technol. Text. Eng. 2016, 4, 1–4. [Google Scholar] [CrossRef]
- Jeong, J.; Park, H.; Lee, Y.; Kang, J.; Chun, J. Developing Parametric Design Fashion Products Using 3D Printing Technology. Fash. Text. 2021, 8, 1–25. [Google Scholar] [CrossRef]
- Wang, Z.; Cai, L.; Jiang, X.; Li, J.; Ji, J.; Zhang, T.; Tao, Y.; Wang, G. 4DCurve: A Shape-Changing Fabrication Method Based on Curved Paths with a 3D Printing Pen. In Proceedings of the Extended Abstracts of the 2023 CHI Conference on Human Factors in Computing Systems, Hamburg, Germany, 23–28 April 2023; pp. 1–7. [Google Scholar]
- Mahshid, P.; Sandro, C. A 3D Printed Wearable Device for Sweat Analysis. In Proceedings of the 2020 IEEE International Symposium on Medical Measurements and Applications (MeMeA), Bari, Italy, 1 June–1 July 2020; pp. 1–5. [Google Scholar]
- Abdollahi, S.; Markvicka, E.J.; Majidi, C.; Feinberg, A.W. 3D Printing Silicone Elastomer for Patient-Specific Wearable Pulse Oximeter. Adv. Health Mater. 2020, 9, 1901735. [Google Scholar] [CrossRef] [PubMed]
- Yin, X.Y.; Zhang, Y.; Cai, X.; Guo, Q.; Yang, J.; Wang, Z.L. 3D Printing of Ionic Conductors for High-Sensitivity Wearable Sensors. Mater. Horiz. 2019, 6, 767–780. [Google Scholar] [CrossRef]
- Wu, Y.; Zeng, Y.; Chen, Y.; Li, C.; Qiu, R.; Liu, W. Photocurable 3D Printing of High Toughness and Self-Healing Hydrogels for Customized Wearable Flexible Sensors. Adv. Funct. Mater. 2021, 31, 2107202. [Google Scholar] [CrossRef]
- Loh, L.Y.W.; Gupta, U.; Wang, Y.; Foo, C.C.; Zhu, J.; Lu, W.F. 3D Printed Metamaterial Capacitive Sensing Array for Universal Jamming Gripper and Human Joint Wearables. Adv. Eng. Mater. 2021, 23, 2001082. [Google Scholar] [CrossRef]
- Qin, H.; Cai, Y.; Dong, J.; Lee, Y.S. Direct Printing of Capacitive Touch Sensors on Flexible Substrates by Additive E-Jet Printing with Silver Nanoinks. J. Manuf. Sci. Eng. 2017, 139, 031011. [Google Scholar] [CrossRef]
- Li, Q.; Wu, T.; Zhao, W.; Li, Y.; Ji, J.; Wang, G. 3D Printing Stretchable Core-Shell Laser Scribed Graphene Conductive Network for Self-Powered Wearable Devices. Compos. B Eng. 2022, 240, 110000. [Google Scholar] [CrossRef]
- Chen, S.; Huang, T.; Zuo, H.; Qian, S.; Guo, Y.; Sun, L.; Lei, D.; Wu, Q.; Zhu, B.; He, C.; et al. A Single Integrated 3D-Printing Process Customizes Elastic and Sustainable Triboelectric Nanogenerators for Wearable Electronics. Adv. Funct. Mater. 2018, 28, 1805108. [Google Scholar] [CrossRef]
- Qian, J.; Xiao, R.; Su, F.; Guo, M.; Liu, D. 3D Wet-Spinning Printing of Wearable Flexible Electronic Sensors of Polypyrrole@polyvinyl Formate. J. Ind. Eng. Chem. 2022, 111, 490–498. [Google Scholar] [CrossRef]
- Li, W.; Lin, K.; Chen, L.; Yang, D.; Ge, Q.; Wang, Z. Self-Powered Wireless Flexible Ionogel Wearable Devices. ACS Appl. Mater. Interfaces 2023, 15, 14768–14776. [Google Scholar] [CrossRef]
- De Tommasi, F.; Massaroni, C.; Caponero, M.A.; Schena, E.; Presti, D.L.; Carassiti, M. Wearable 3D-Printed Thumb-Shaped Device Based on Fiber Bragg Grating Sensor for Epidural Space Detection. IEEE Sens. J. 2023, 23, 16907–16914. [Google Scholar] [CrossRef]
- Bamani, E.; Kahanowich, N.D.; Ben-David, I.; Sintov, A. Robust Multi-User In-Hand Object Recognition in Human-Robot Collaboration Using a Wearable Force-Myography Device. IEEE Robot. Autom. Lett. 2021, 7, 104–111. [Google Scholar] [CrossRef]
- Delva, M.L.; Lajoie, K.; Khoshnam, M.; Menon, C. Wrist-Worn Wearables Based on Force Myography: On the Significance of User Anthropometry. Biomed. Eng. Online 2020, 19, 1–18. [Google Scholar] [CrossRef]
- Robson, N.; Soh, G.S. Geometric Design of Eight-Bar Wearable Devices Based on Limb Physiological Contact Task. Mech. Mach. Theory 2016, 100, 358–367. [Google Scholar] [CrossRef]
- Tan, G.R.; Robson, N.P.; Soh, G.S. Motion Generation of Passive Slider Multiloop Wearable Hand Devices. J. Mech. Robot. 2017, 9, 041011. [Google Scholar] [CrossRef]
- Lee, J.; Ban, K.; Choe, J.; Jung, E.S. Ergonomic Design of Necklace Type Wearable Device Corresponding Author. J. Korean Ergon. Soc. 2017, 36, 281–292. [Google Scholar] [CrossRef]
- Shin, S.C.; Lee, J.; Choe, S.; Yang, H.I.; Min, J.; Ahn, K.Y.; Jeon, J.Y.; Kang, H.G. Dry Electrode-Based Body Fat Estimation System with Anthropometric Data for Use in a Wearable Device. Sensors 2019, 19, 2177. [Google Scholar] [CrossRef] [PubMed]
- Schauss, G.; Arquilla, K.; Anderson, A. ARGONAUT: An Inclusive Design Process for Wearable Health Monitoring Systems. In Proceedings of the 2022 CHI Conference on Human Factors in Computing Systems, New Orleans, LA, USA, 29 April–5 May 2022; pp. 1–12. [Google Scholar]
- Wang, X.; Tao, X.; So, R.C.H.; Shu, L.; Yang, B.; Li, Y. Monitoring Elbow Isometric Contraction by Novel Wearable Fabric Sensing Device. Smart Mater. Struct. 2016, 25, 125022. [Google Scholar] [CrossRef]
- Anuar, A.; Mahamud, F.; Md Saad, J.; Rana Singam, K. Design of a Wearable Walking Aid Based on Anthropometric Measurement of Cerebral Palsy Children in Malaysia. In Proceedings of the 2018 3rd International Conference on Control, Robotics and Cybernetics (CRC), Penang, Malaysia, 26–28 September 2018; pp. 57–60. [Google Scholar]
- Verwulgen, S.; Lacko, D.; Vleugels, J.; Vaes, K.; Danckaers, F.; de Bruyne, G.; Huysmans, T. A New Data Structure and Workflow for Using 3D Anthropometry in the Design of Wearable Products. Int. J. Ind. Ergon. 2018, 64, 108–117. [Google Scholar] [CrossRef]
- Kim, T.W.; Lee, C.H.; Min, H.J.; Kim, D.D.; Kim, D.H.; Park, S.Y.; Kim, H.W. Skincare Device Product Design Based on Factor Analysis of Korean Anthropometric Data. Cosmetics 2022, 9, 42. [Google Scholar] [CrossRef]
- Paterson, A.M.; Bibb, R.; Campbell, R.I.; Bingham, G. Comparing Additive Manufacturing Technologies for Customised Wrist Splints. Rapid Prototyp. J. 2015, 21, 230–243. [Google Scholar] [CrossRef]
- Liu, W.M.; Bo Huang, H. Application of Artificial Intelligence Technology in Wearable Product Design. In Proceedings of the 2020 International Conference on Innovation Design and Digital Technology (ICIDDT), online, 5–6 December 2020; pp. 194–197. [Google Scholar]
- Nishida, J.; Takatori, H.; Sato, K.; Suzuki, K. CHILDHOOD: Wearable Suit for Augmented Child Experience. In Proceedings of the Virtual Reality International Conference—Laval Virtual 2015, Laval, France, 8–10 April 2015; pp. 1–4. [Google Scholar]
- Lee, W.; Lee, B.; Yang, X.; Jung, H.; Bok, I.; Kim, C.; Kwon, O.; You, H. A 3D Anthropometric Sizing Analysis System Based on North American CAESAR 3D Scan Data for Design of Head Wearable Products. Comput. Ind. Eng. 2018, 117, 121–130. [Google Scholar] [CrossRef]
- Lee, W.; Yang, X.; Jung, H.; Bok, I.; Kim, C.; Kwon, O.; You, H. Anthropometric Analysis of 3D Ear Scans of Koreans and Caucasians for Ear Product Design. Ergonomics 2018, 61, 1480–1495. [Google Scholar] [CrossRef] [PubMed]
- Fan, H.; Yu, S.; Chu, J.; Wang, M.; Chen, D.; Zhang, S.; Wang, W.; Wu, T.; Wang, N. Anthropometric Characteristics and Product Categorization of Chinese Auricles for Ergonomic Design. Int. J. Ind. Ergon. 2019, 69, 118–141. [Google Scholar] [CrossRef]
- Ban, K.; Jung, E.S. Ear Shape Categorization for Ergonomic Product Design. Int. J. Ind. Ergon. 2020, 80, 102962. [Google Scholar] [CrossRef]
- Granberry, R.; Duvall, J.; Dunne, L.E.; Holschuh, B. An Analysis of Anthropometric Geometric Variability of the Lower Leg for the Fit & Function of Advanced Functional Garments. In Proceedings of the 2017 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Maui, HI, USA, 11–15 September 2017; Part F130534. pp. 10–17. [Google Scholar]
- Kang, Y.; Kim, S. Analyzing the Changes in Anthropometric Measurements with Various Postures Using Three-Dimensional Scanning Technology. J. Eng. Fiber Fabrs 2023, 18, 1–15. [Google Scholar] [CrossRef]
- Luximon, A.; Zhang, Y.; Luximon, Y.; Xiao, M. Sizing and Grading for Wearable Products. Comput. Aided Des. 2012, 44, 77–84. [Google Scholar] [CrossRef]
- Llop-Harillo, I.; Iserte, J.D.S.L.; PCrossed, D. Signrez-González, A. Benchmarking Anthropomorphic Hands through Grasping Simulations. J. Comput. Des. Eng. 2022, 9, 330–342. [Google Scholar] [CrossRef]
- Kartelli, F.; Berger, M.; Önlü, N. The Future of Textile and Fashion Design in Virtual Reality. In Proceedings of the 7th International Technical Textiles Congress, Izmir, Turkey, 10–12 October 2018; pp. 261–268. [Google Scholar]
- Rohmatin, Y.Y.; Nurjannah, N.; Stephanus, B. Using Anthropometric Data to Design a Fortable Study Desk and User Posture Analysis with the Rappid Upper Limb Assessment (Rula) Method. Int. J. Sci. Technol. 2023, 2, 15–20. [Google Scholar] [CrossRef]
- Urquhart, L.; Wodehouse, A.; Loudon, B. Synthesising Computational Design Methods for a Human-Centred Design Framework. In Design Society; Cambridge University Press: Cambridge, UK, 2022; Volume 2, pp. 633–642. [Google Scholar]
- Lazaro Vasquez, E.S. Auto-Adjustable Bra for Women with a Pronounced Alteration in Breast Volume. In Proceedings of the Thirteenth International Conference on Tangible, Embedded, and Embodied Interaction, Tempe, AZ, USA, 17–20 March 2019; pp. 429–435. [Google Scholar]
- Sareen, H.; Umapathi, U.; Shin, P.; Kakehi, Y.; Ou, J.; Maes, P.; Ishii, H. Printflatables: Printing Human-Scale, Functional and Dynamic Inflatable Objects. In Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems, Denver, CO, USA, 6–11 May 2017; pp. 3669–3680. [Google Scholar]
- Markvicka, E.; Wang, G.; Lee, Y.C.; Laput, G.; Majidi, C.; Yao, L. Electrodermis: Fully Untethered, Stretchable, and Highly-Customizable Electronic Bandages. In Proceedings of the 2019 CHI Conference on Human Factors in Computing Systems, Glasgow, UK, 4–9 May 2019; pp. 1–10. [Google Scholar]
- Wang, S.; Fang, C.M.; Yang, Y.; Lu, K.; Vlachostergiou, M.; Yao, L. Morphace: An Integrated Approach for Designing Customizable and Transformative Facial Prosthetic Makeup. In Proceedings of the Augmented Humans International Conference, Online, 13–15 March 2022; pp. 58–67. [Google Scholar]
- Cheng, T.; Thielen, M.; Poppinga, S.; Tahouni, Y.; Wood, D.; Steinberg, T.; Menges, A.; Speck, T. Bio-Inspired Motion Mechanisms: Computational Design and Material Programming of Self-Adjusting 4D-Printed Wearable Systems. Adv. Sci. 2021, 8, 2100411. [Google Scholar] [CrossRef]
- Bai, X.; Huerta, O.; Unver, E.; Allen, J.; Clayton, J.E. A Parametric Product Design Framework for the Development of Mass Customized Head/Face (Eyewear) Products. Appl. Sci. 2021, 11, 5382. [Google Scholar] [CrossRef]
- Fernandez-Vicente, M.; Corbatón, C.R.; Fernández-Vicente, M.; Conejero, A. Design and 3D printing of custom-fit products with free online software and low cost technologies. A study of viability for product design student projects. In Proceedings of the 10th International Technology, Education and Development Conference, Valencia, Spain, 7–9 March 2016; pp. 3906–3910. [Google Scholar]
- EL-Kholy, G.A.; Wedian, T.M.; Mohammed, H.Y.K. Creating Contemporary Parametric Fashion Designs Inspired by Islamic Motifs Using 3D Printing. Herit. Des. J. 2021, 1, 300–320. [Google Scholar] [CrossRef]
- Greder, K.C.; Pei, J.; Shin, J. Design in 3D: A Computational Fashion Design Protocol. Int. J. Cloth. Sci. Technol. 2020, 32, 537–549. [Google Scholar] [CrossRef]
- Nachtigall, T.R.; Tomico, O.; Wakkary, R.; Wensveen, S.; Van Dongen, P.; Van Noorden, L.T. Towards Ultra Personalized 4D Printed Shoes. In Proceedings of the CHI Conference on Human Factors in Computing Systems, Montreal, QC, Canada, 21–26 April 2018; pp. 1–9. [Google Scholar]
- Efkolidis, N.; Minaoglou, P.; Aidinli, K.; Kyratsis, P. Computational Design Used for Jewelry. In Proceedings of the 10th International Symposium on Graphic Engineering and Design, Novi Sad, Serbia, 12–14 November 2020; Department of Graphic Engineering and Design, Faculty of Technical Sciences, University of Novi Sad: Novi Sad, Serbia, 2020; pp. 531–536. [Google Scholar]
- Sun, L.; Li, J.; Chen, Y.; Yang, Y.; Yu, Z.; Luo, D.; Gu, J.; Yao, L.; Tao, Y.; Wang, G. Flextruss: A Computational Threading Method for Multi-Material, Multi-Form and Multi-Use Prototyping. In Proceedings of the 2021 CHI Conference on Human Factors in Computing Systems, Yokohama, Japan, 8–13 May 2021; pp. 1–12. [Google Scholar]
- Li, J.; Tanaka, H. Rapid Customization System for 3D-Printed Splint Using Programmable Modeling Technique—A Practical Approach. 3D Print. Med. 2018, 4, 1–21. [Google Scholar] [CrossRef]
- Barros, M.O.; Walker, A.; Stankovic, T. Computational Design of an Additively Manufactured Origami-Based Hand Orthosis. In Design Society; Cambridge University Press: Cambridge, UK, 2022; Volume 2, pp. 1231–1242. [Google Scholar]
- Buonamici, F.; Furferi, R.; Governi, L.; Lazzeri, S.; McGreevy, K.S.; Servi, M.; Talanti, E.; Uccheddu, F.; Volpe, Y. A Practical Methodology for Computer-Aided Design of Custom 3D Printable Casts for Wrist Fractures. Vis. Comput. 2020, 36, 375–390. [Google Scholar] [CrossRef]
- Li, J.; Tanaka, H. Feasibility Study Applying a Parametric Model as the Design Generator for 3D–Printed Orthosis for Fracture Immobilization. 3D Print. Med. 2018, 4, 1–15. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Fang, G.; Dai, C.; Verlinden, J.; Wu, J.; Whiting, E.; Wang, C.C.L. Thermal-Comfort Design of Personalized Casts. In Proceedings of the 30th Annual ACM Symposium on User Interface Software and Technology, Québec City, QC, Canada, 22–25 October 2017; pp. 243–254. [Google Scholar]
- Kumar, A.; Chhabra, D. Parametric Topology Optimization Approach for Sustainable Development of Customized Orthotic Appliances Using Additive Manufacturing. Mech. Adv. Mater. Struct. 2023, 30, 1–14. [Google Scholar] [CrossRef]
- Badini, S.; Regondi, S.; Lammi, C.; Bollati, C.; Donvito, G.; Pugliese, R. Computational Mechanics of Form-Fitting 3D-Printed Lattice-Based Wrist-Hand Orthosis for Motor Neuron Disease. Biomedicines 2023, 11, 1787. [Google Scholar] [CrossRef]
- Tsabedze, T.; Trinh, J.; Alomran, A.; Clayton, J.; Zhang, J. Design and Characterization of AWARD: An Active Wearable Assistive and Resistive Device. In Proceedings of the 2022 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Sapporo, Japan, 11–15 July 2022; pp. 844–849. [Google Scholar]
- Malvezzi, M.; Baldi, T.L.; Villani, A.; Ciccarese, F.; Design, D.P. Development, and Preliminary Evaluation of a Highly Wearable Exoskeleton. In Proceedings of the 2020 29th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), Naples, Italy, 31 August–4 September 2020; Volume 29, pp. 1055–1062. [Google Scholar]
- Liu, Z.; Li, Z.; Yi, Y.; Li, L.; Zhai, H.; Lu, Z.; Jin, L.; Lu, J.R.; Xie, S.Q.; Zheng, Z.; et al. Flexible Strain Sensing Percolation Networks towards Complicated Wearable Microclimate and Multi-Direction Mechanical Inputs. Nano Energy 2022, 99, 107444. [Google Scholar] [CrossRef]
- Kim, J.; Kantharaju, P.; Yi, H.; Jacobson, M.; Jeong, H.; Kim, H.; Lee, J.; Matthews, J.; Zavanelli, N.; Kim, H.; et al. Soft Wearable Flexible Bioelectronics Integrated with an Ankle-Foot Exoskeleton for Estimation of Metabolic Costs and Physical Effort. NPJ Flex. Electron. 2023, 7, 3. [Google Scholar] [CrossRef]
- Chirila, R.; Ntagios, M.; Dahiya, R. 3D Printed Wearable Exoskeleton Human-Machine Interfacing Device. In Proceedings of the 2020 IEEE SENSORS, Rotterdam, The Netherlands, 25–28 October 2020; pp. 1–4. [Google Scholar]
- Cempini, M.; De Rossi, S.M.M.; Lenzi, T.; Cortese, M.; Giovacchini, F.; Vitiello, N.; Carrozza, M.C. Kinematics and Design of a Portable and Wearable Exoskeleton for Hand Rehabilitation. In Proceedings of the 2013 IEEE 13th International Conference on Rehabilitation Robotics (ICORR), Seattle, WA, USA, 24–26 June 2013; pp. 1–6. [Google Scholar]
- Wu, Q.; Chen, B.; Wu, H. Neural-Network-Enhanced Torque Estimation Control of a Soft Wearable Exoskeleton for Elbow Assistance. Mechatronics 2019, 63, 102279. [Google Scholar] [CrossRef]
- Chen, X.; Zhang, S.; Cao, K.; Wei, C.; Zhao, W.; Yao, J. Development of a Wearable Upper Limb Rehabilitation Robot Based on Reinforced Soft Pneumatic Actuators. Chin. J. Mech. Eng. 2022, 35, 83. [Google Scholar] [CrossRef]
- Ben Abdallah, I.; Bouteraa, Y. A Newly-Designed Wearable Robotic Hand Exoskeleton Controlled by EMG Signals and ROS Embedded Systems. Robotics 2023, 12, 95. [Google Scholar] [CrossRef]
- Allen d’Ávila Silveira, C.; Ozgun Kilic, A.; Alaoui, S.F. Wearable Choreographer: Designing Soft-Robotics for Dance Practice. In Proceedings of the Designing Interactive Systems Conference, Online, 13–17 June 2022; pp. 1581–1596. [Google Scholar]
- Balaji, S.S.; Sharma, D.B.; Karthick, R.K.; Kumar, K.S. Design, Analysis and Development of Chair-Less Chair Exoskeleton System. J. Xi’Shiyou Univ. 2018, 18, 241–245. [Google Scholar]
- Ou, Y.K.; Wang, Y.L.; Chang, H.C.; Chen, C.C. Design and Development of a Wearable Exoskeleton System for Stroke Rehabilitation. Healthcare 2020, 8, 18. [Google Scholar] [CrossRef]
- Chen, B.; Zhong, C.H.; Zhao, X.; Ma, H.; Guan, X.; Li, X.; Liang, F.Y.; Cheng, J.C.Y.; Qin, L.; Law, S.W.; et al. A Wearable Exoskeleton Suit for Motion Assistance to Paralysed Patients. J. Orthop. Transl. 2017, 11, 7–18. [Google Scholar] [CrossRef]
- Long, Y.; Du, Z.J.; Wang, W.; Dong, W. Development of a Wearable Exoskeleton Rehabilitation System Based on Hybrid Control Mode. Int. J. Adv. Robot. Syst. 2016, 13, 1729881416664847. [Google Scholar] [CrossRef]
- Liu, C.; Zhu, C.; Liang, H.; Yoshioka, M.; Murata, Y.; Yu, Y. Development of a Light Wearable Exoskeleton for Upper Extremity Augmentation. In Proceedings of the 2016 23rd International Conference on Mechatronics and Machine Vision in Practice (M2VIP), Nanjing, China, 28–30 November 2016; pp. 1–6. [Google Scholar]
- Cappello, L.; Binh, D.K.; Yen, S.C.; Masia, L. Design and Preliminary Characterization of a Soft Wearable Exoskeleton for Upper Limb. In Proceedings of the 2016 6th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob), Singapore, 26–29 June 2016; pp. 623–630. [Google Scholar]
- Emmens, A.; Van Asseldonk, E.; Masciullo, M.; Arquilla, M.; Pisotta, I.; Tagliamonte, N.L.; Tamburella, F.; Molinari, M.; Van Der Kooij, H. Improving the Standing Balance of Paraplegics through the Use of a Wearable Exoskeleton. In Proceedings of the 2018 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob), Enschede, The Netherlands, 26–29 August 2018; pp. 707–712. [Google Scholar]
- Ji, X.; Wang, D.; Li, P.; Zheng, L.; Sun, J.; Wu, X. SIAT-WEXV2: A Wearable Exoskeleton for Reducing Lumbar Load during Lifting Tasks. Complexity 2020, 2020, 1–12. [Google Scholar] [CrossRef]
- Zhao, L.; Yang, T.; Yang, Y.; Yu, P. A Wearable Upper Limb Exoskeleton for Intuitive Teleoperation of Anthropomorphic Manipulators. Machines 2023, 11, 441. [Google Scholar] [CrossRef]
- Kiernan, D.; Dunn Siino, K.; Hawkins, D.A. Unsupervised Gait Event Identification with a Single Wearable Accelerometer and/or Gyroscope: A Comparison of Methods across Running Speeds, Surfaces, and Foot Strike Patterns. Sensors 2023, 23, 5022. [Google Scholar] [CrossRef]
- Pineda-Gutierrez, J.; Miro-Amarante, L.; Hernandez-Velazquez, M.; Sivianes-Castillo, F.; Dominguez-Morales, M. Designing a Wearable Device for Step Analyzing. In Proceedings of the 2019 IEEE 32nd International Symposium on Computer-Based Medical Systems (CBMS), Cordoba, Spain, 5–7 June 2019; pp. 259–262. [Google Scholar]
- Zrenner, M.; Ullrich, M.; Zobel, P.; Jensen, U.; Laser, F.; Groh, B.H.; Duemler, B.; Eskofier, B.M. Kinematic Parameter Evaluation for the Purpose of a Wearable Running Shoe Recommendation. In Proceedings of the 2018 IEEE 15th International Conference on Wearable and Implantable Body Sensor Networks (BSN), Las Vegas, NV, USA, 4–7 March 2018; pp. 106–109. [Google Scholar]
- Sazonov, E.S.; Fulk, G.; Hill, J.; Schutz, Y.; Browning, R. Monitoring of Posture Allocations and Activities by a Shoe-Based Wearable Sensor. IEEE Trans. Biomed. Eng. 2011, 58, 983–990. [Google Scholar] [CrossRef] [PubMed]
- Nagamune, K.; Yamada, M. A Wearable Measurement System for Sole Pressure to Calculate Center of Pressure in Sports Activity. In Proceedings of the 2018 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Miyazaki, Japan, 7–10 October 2018; pp. 1333–1336. [Google Scholar]
- Ryu, C.H.; Cho, J.Y.; Jeong, S.Y.; Eom, W.; Shin, H.; Hwang, W.; Jhun, J.P.; Hong, S.D.; Kim, T.; Jeong, I.W.; et al. Wearable Piezoelectric Yarns with Inner Electrodes for Energy Harvesting and Signal Sensing. Adv. Mater. Technol. 2022, 7, 2101138. [Google Scholar] [CrossRef]
- Tahir, A.M.; Chowdhury, M.E.H.; Khandakar, A.; Al-Hamouz, S.; Abdalla, M.; Awadallah, S.; Reaz, M.B.I.; Al-Emadi, N. A Systematic Approach to the Design and Characterization of a Smart Insole for Detecting Vertical Ground Reaction Force (VGRF) in Gait Analysis. Sensors 2020, 20, 957. [Google Scholar] [CrossRef] [PubMed]
- Amitrano, F.; Coccia, A.; Ricciardi, C.; Donisi, L.; Cesarelli, G.; Capodaglio, E.M.; D’addio, G. Design and Validation of an E-Textile-Based Wearable Sock for Remote Gait and Postural Assessment. Sensors 2020, 20, 6691. [Google Scholar] [CrossRef] [PubMed]
- Kimura, H.; Sasagawa, K.; Fujisaki, K. Measurement of Contact Stresses on the Sole of the Foot During Walking Using a Wearable Measurement System. Adv. Biomed. Eng. 2023, 12, 147–153. [Google Scholar] [CrossRef]
- Cheng, X.; Meng, B.; Zhang, X.; Han, M.; Su, Z.; Zhang, H. Wearable Electrode-Free Triboelectric Generator for Harvesting Biomechanical Energy. Nano Energy 2015, 12, 19–25. [Google Scholar] [CrossRef]
- Su, K.; Lin, X.; Liu, Z.; Tian, Y.; Peng, Z.; Meng, B. Wearable Triboelectric Nanogenerator with Ground-Coupled Electrode for Biomechanical Energy Harvesting and Sensing. Biosensors 2023, 13, 548. [Google Scholar] [CrossRef]
- Liu, X.; Yue, Y.; Wu, X.; Hao, Y.; Lu, Y. Finite Element Analysis of Shock Absorption of Porous Soles Established by Grasshopper and UG Secondary Development. Math. Probl. Eng. 2020, 2020, 1–12. [Google Scholar] [CrossRef]
- Manavis, A.; Minaoglou, P.; Firtikiadis, L.; Efkolidis, N.; Kyratsis, P. Computational Customised Shoe-Sole Design: A Branding-based Approach. In Proceedings of the V International Conference Contemporary Trends and Innovations in the Textile Industry, Belgrade, Serbia, 15–16 September 2022; pp. 90–98. [Google Scholar]
- Amorim, D.J.N.; Nachtigall, T.; Alonso, M.B. Exploring Mechanical Meta-Material Structures through Personalised Shoe Sole Design. In Proceedings of the 3rd Annual ACM Symposium on Computational Fabrication, Pittsburgh, PA, USA, 16–18 June 2019; pp. 1–8. [Google Scholar]
- Ishiguro, Y.; Ishikawa, T.; Kojima, K.; Sugai, F.; Nozawa, S.; Kakiuchi, Y.; Okada, K.; Inaba, M. Online Master-Slave Footstep Control for Dynamical Human-RobotSynchronization with Wearable Sole Sensor. In Proceedings of the 2016 IEEE-RAS 16th International Conference on Humanoid Robots (Humanoids), Cancun, Mexico, 15–17 November 2016; pp. 864–869. [Google Scholar]
- Bukauskas, A.; Koronaki, A.; Lee, T.U.; Ott, D.; Al Asali, M.W.; Jalia, A.; Bashford, T.; Gatoo, A.; Newman, J.; Gattas, J.M.; et al. Curved-Crease Origami Face Shields for Infection Control. PLoS ONE 2021, 16, 0245737. [Google Scholar] [CrossRef]
- Nilasaroya, A.; Kop, A.M.; Collier, R.C.; Kennedy, B.; Kelsey, L.J.; Pollard, F.; Ha, J.F.; Morrison, D.A. Establishing Local Manufacture of PPE for Healthcare Workers in the Time of a Global Pandemic. Heliyon 2023, 9, e13349. [Google Scholar] [CrossRef]
- Suen, W.S.; Huang, G.; Kang, Z.; Gu, Y.; Fan, J.; Shou, D. Development of Wearable Air-Conditioned Mask for Personal Thermal Management. Build. Environ. 2021, 205, 108236. [Google Scholar] [CrossRef] [PubMed]
- Iftikhar Hashmi, H.; Luximon, Y. Embracing the Role of Fashion Value in the Design of Wearable Products: A Case Study of 3D Face Mask Bracket. In Proceedings of the Congress of the International Association of Societies of Design Research, Online, 6–9 December 2021; pp. 2035–2046. [Google Scholar]
- Liang, K.; Carmone, S.; Brambilla, D.; Leroux, J.-C. 3D Printing of a Wearable Personalized Oral Delivery Device: A First-in-Human Study. Sci. Adv. 2018, 4, 2544. [Google Scholar] [CrossRef]
- Laffan, C.F.; Coleshill, J.E.; Stanfield, B.; Stanfield, M.; Ferworn, A. Using the ARAIG Haptic Suit to Assist in Navigating Firefighters out of Hazardous Environments. In Proceedings of the 2020 11th IEEE Annual Information Technology, Electronics and Mobile Communication Conference (IEMCON), Vancouver, BC, Canada, 4–7 November 2020; pp. 439–444. [Google Scholar]
- Jeril, V.R.; Sarath, T.V. An IoT Based Real-Time Stress Detection System for Fire-Fighters. In Proceedings of the 2019 International Conference on Intelligent Computing and Control Systems (ICCS), Madurai, India, 15–17 May 2019; pp. 354–360. [Google Scholar]
- Zhang, J.; Feng, H.; Ngeh, C.J.; Raiti, J.; Wang, Y.; Goncalves, P.; Sarymbekova, G.; Wagner, L.E.; James, J.; Albee, P.; et al. Designing a Smart Helmet for Wildland Firefighters to Avoid Dehydration by Monitoring Bio-Signals. In Proceedings of the 2021 CHI Conference on Human Factors in Computing Systems, Yokohama, Japan, 8–13 May 2021; pp. 1–6. [Google Scholar]
- Tartare, G.; Zeng, X.; Koehl, L. Development of a Wearable System for Monitoring the Firefighter’s Physiological State. In Proceedings of the 2018 IEEE Industrial Cyber-Physical Systems (ICPS), St. Petersburg, Russia, 15–18 May 2018; pp. 561–566. [Google Scholar]
- Park, H.; Kakar, R.S.; Pei, J.; Tome, J.M.; Stull, J. Impact of Size of Fire Boot and SCBA Cylinder on Firefighters’ Mobility. Cloth. Text. Res. J. 2019, 37, 103–118. [Google Scholar] [CrossRef]
- Van Kleunen, L.; Holton, J.; Strawn, D.; Voida, S. Designing Navigation Aides for Wildland Firefighters. In Proceedings of the 2019 ACM International Joint Conference on Pervasive and Ubiquitous Computing, London, UK, 9–13 September 2019; pp. 226–229. [Google Scholar]
- Olson, J.S. A Survey of Wearable Sensor Networks in Health and Entertainment. MOJ Appl. Bionics Biomech. 2018, 2, 280–287. [Google Scholar] [CrossRef]
- Callihan, M.; Cole, H.; Stokley, H.; Gunter, J.; Clamp, K.; Martin, A.; Doherty, H. Comparison of Slate Safety Wearable Device to Ingestible Pill and Wearable Heart Rate Monitor. Sensors 2023, 23, 877. [Google Scholar] [CrossRef] [PubMed]
- Sanfilippo, F.; Pettersen, K.Y. A Sensor Fusion Wearable Health-Monitoring System with Haptic Feedback. In Proceedings of the 2015 11th International Conference on Innovations in Information Technology (IIT), Dubai, United Arab Emirates, 1–3 November 2015; pp. 262–266. [Google Scholar]
- De Fazio, R.; Al-Hinnawi, A.R.; De Vittorio, M.; Visconti, P. An Energy-Autonomous Smart Shirt Employing Wearable Sensors for Users’ Safety and Protection in Hazardous Workplaces. Appl. Sci. 2022, 12, 2926. [Google Scholar] [CrossRef]
- Abbasianjahromi, H.; Sohrab Ghazvini, E. Developing a Wearable Device Based on IoT to Monitor the Use of Personal Protective Equipment in Construction Projects. Iran. J. Sci. Technol. Trans. Civ. Eng. 2022, 46, 2561–2573. [Google Scholar] [CrossRef]
- Xie, J.; Wu, Q. Design and Evaluation of CPR Emergency Equipment for Non-Professionals. Sensors 2023, 23, 5948. [Google Scholar] [CrossRef]
- Lin, Y.; Chen, H.F.; Chen, H.H.; Yang, Z.L.; Chang, T.C.; Zhan, Z.R. Approximate Model for Stress Assessment Using Electroencephalogram Signal. Sens. Mater. 2022, 34, 779–788. [Google Scholar] [CrossRef]
- Stetter, B.J.; Ringhof, S.; Krafft, F.C.; Sell, S.; Stein, T. Estimation of Knee Joint Forces in Sport Movements Using Wearable Sensors and Machine Learning. Sensors 2019, 19, 3690. [Google Scholar] [CrossRef]
- Di Paolo, S.; Lopomo, N.F.; Villa, F.D.; Paolini, G.; Figari, G.; Bragonzoni, L.; Grassi, A.; Zaffagnini, S. Rehabilitation and Return to Sport Assessment after Anterior Cruciate Ligament Injury: Quantifying Joint Kinematics during Complex High-speed Tasks through Wearable Sensors. Sensors 2021, 21, 2331. [Google Scholar] [CrossRef]
- Matijevich, E.S.; Branscombe, L.M.; Scott, L.R.; Zelik, K.E. Ground Reaction Force Metrics Are Not Strongly Correlated with Tibial Bone Load When Running across Speeds and Slopes: Implications for Science, Sport and Wearable Tech. PLoS ONE 2019, 14, 0210000. [Google Scholar] [CrossRef]
- Xie, L.; Chen, P.; Chen, S.; Yu, K.; Sun, H. Low-Cost and Highly Sensitive Wearable Sensor Based on Napkin for Health Monitoring. Sensors 2019, 19, 3427. [Google Scholar] [CrossRef]
- Zhao, D.; Zhang, K.; Meng, Y.; Li, Z.; Pi, Y.; Shi, Y.; You, J.; Wang, R.; Dai, Z.; Zhou, B.; et al. Untethered Triboelectric Patch for Wearable Smart Sensing and Energy Harvesting. Nano Energy 2022, 100, 107500. [Google Scholar] [CrossRef]
- Gao, Y.; Ota, H.; Schaler, E.W.; Chen, K.; Zhao, A.; Gao, W.; Fahad, H.M.; Leng, Y.; Zheng, A.; Xiong, F.; et al. Wearable Microfluidic Diaphragm Pressure Sensor for Health and Tactile Touch Monitoring. Adv. Mater. 2017, 29, 1701985. [Google Scholar] [CrossRef]
- Picchio, M.L.; Gallastegui, A.; Casado, N.; Lopez-Larrea, N.; Marchiori, B.; del Agua, I.; Criado-Gonzalez, M.; Mantione, D.; Minari, R.J.; Mecerreyes, D. Mixed Ionic and Electronic Conducting Eutectogels for 3D-Printable Wearable Sensors and Bioelectrodes. Adv. Mater. Technol. 2022, 7, 2101680. [Google Scholar] [CrossRef]
- Kang, X.; Zhang, J.; Shao, Z.; Wang, G.; Geng, X.; Zhang, Y.; Zhang, H. A Wearable and Real-Time Pulse Wave Monitoring System Based on a Flexible Compound Sensor. Biosensors 2022, 12, 133. [Google Scholar] [CrossRef]
- He, T.; Wang, H.; Wang, J.; Tian, X.; Wen, F.; Shi, Q.; Ho, J.S.; Lee, C. Self-Sustainable Wearable Textile Nano-Energy Nano-System (NENS) for Next-Generation Healthcare Applications. Adv. Sci. 2019, 6, 1901437. [Google Scholar] [CrossRef]
- Mahmud, M.S.; Wang, H.; Alam, E.E.; Fang, H. A Real Time and Non-Contact Multiparameter Wearable Device for Health Monitoring. In Proceedings of the 2016 IEEE Global Communications Conference (GLOBECOM), Washington, DC, USA, 4–8 December 2016; pp. 1–6. [Google Scholar]
- Jinkins, K.R.; Li, S.; Arafa, H.; Jeong, H.; Joong Lee, Y.; Wu, C.; Campisi, E.; Ni, X.; Cho, D.; Huang, Y.; et al. Thermally Switchable, Crystallizable Oil and Silicone Composite Adhesives for Skin-Interfaced Wearable Devices. Sci. Adv. 2022, 8, 537. [Google Scholar] [CrossRef]
- Jiang, Y.; Pan, K.; Leng, T.; Hu, Z. Smart Textile Integrated Wireless Powered near Field Communication Body Temperature and Sweat Sensing System. IEEE J. Electromagn. RF Microw. Med. Biol. 2020, 4, 164–170. [Google Scholar] [CrossRef]
- Zhao, J.; Fu, Y.; Xiao, Y.; Dong, Y.; Wang, X.; Lin, L. A Naturally Integrated Smart Textile for Wearable Electronics Applications. Adv. Mater. Technol. 2020, 5, 1900781. [Google Scholar] [CrossRef]
- Maity, D.; Rajavel, K.; Rajendra Kumar, R.T. MWCNT Enabled Smart Textiles Based Flexible and Wearable Sensor for Human Motion and Humidity Monitoring. Cellulose 2021, 28, 2505–2520. [Google Scholar] [CrossRef]
- García Patiño, A.; Mahta, K.; Carlo, M. Wearable Device to Monitor Back Movements Using an Inductive Textile Sensor. Sensors 2020, 20, 905. [Google Scholar] [CrossRef]
- Capineri, L. Resistive Sensors with Smart Textiles for Wearable Technology: From Fabrication Processes to Integration with Electronics. In Procedia Engineering; Elsevier: Amsterdam, The Netherlands, 2014; Volume 87, pp. 724–727. [Google Scholar]
- Fan, W.; He, Q.; Meng, K.; Tan, X.; Zhou, Z.; Zhang, G.; Yang, J.; Lin Wang, Z. Machine-Knitted Washable Sensor Array Textile for Precise Epidermal Physiological Signal Monitoring. Sci. Adv. 2020, 6, 2840. [Google Scholar] [CrossRef]
- Hossain, I.Z.; Khan, A.; Hossain, G. A Piezoelectric Smart Textile for Energy Harvesting and Wearable Self-Powered Sensors. Energy 2022, 15, 5541. [Google Scholar] [CrossRef]
- Golparvar, A.J.; Yapici, M.K. Graphene Smart Textile-Based Wearable Eye Movement Sensor for Electro-Ocular Control and Interaction with Objects. J. Electrochem. Soc. 2019, 166, B3184–B3193. [Google Scholar] [CrossRef]
- Luo, Y.; Wu, K.; Palacios, T.S.; Matusik, W. Knitui: Fabricating Interactive and Sensing Textiles with Machine Kniting. In Proceedings of the 2021 CHI Conference on Human Factors in Computing Systems, Yokohama, Japan, 8–13 May 2021; pp. 1–12. [Google Scholar]
- Ahmed, A.; Jalil, M.A.; Hossain, M.M.; Moniruzzaman, M.; Adak, B.; Islam, M.T.; Parvez, M.S.; Mukhopadhyay, S. A PEDOT:PSS and Graphene-Clad Smart Textile-Based Wearable Electronic Joule Heater with High Thermal Stability. J. Mater. Chem. C Mater. 2020, 8, 16204–16215. [Google Scholar] [CrossRef]
- Nanjappan, V.; Shi, R.; Liang, H.N.; Lau, K.K.T.; Yue, Y.; Atkinson, K. Towards a Taxonomy for In-Vehicle Interactions Using Wearable Smart Textiles: Insights from a User-Elicitation Study. Multimodal. Technol. Interact. 2019, 3, 33. [Google Scholar] [CrossRef]
- Meng, K.; Zhao, S.; Zhou, Y.; Wu, Y.; Zhang, S.; He, Q.; Wang, X.; Zhou, Z.; Fan, W.; Tan, X.; et al. A Wireless Textile-Based Sensor System for Self-Powered Personalized Health Care. Matter 2020, 2, 896–907. [Google Scholar] [CrossRef]
- Papachristou, E.; Anastassiu, H.T. Application of 3D Virtual Prototyping Technology to the Integration of Wearable Antennas into Fashion Garments. Technologies 2022, 10, 62. [Google Scholar] [CrossRef]
- Zhuo, E.; Wang, Z.; Chen, X.; Zou, J.; Fang, Y.; Zhuo, J.; Li, Y.; Zhang, J.; Gong, Z. Wearable Smart Fabric Based on Hybrid E-Fiber Sensor for Real-Time Finger Motion Detection. Polymers 2023, 15, 2934. [Google Scholar] [CrossRef] [PubMed]
- Xu, D.; Ouyang, Z.; Dong, Y.; Yu, H.Y.; Zheng, S.; Li, S.; Tam, K.C. Robust, Breathable and Flexible Smart Textiles as Multifunctional Sensor and Heater for Personal Health Management. Adv. Fiber Mater. 2023, 5, 282–295. [Google Scholar] [CrossRef]
- Kos, A.; Milutinović, V.; Umek, A. Challenges in Wireless Communication for Connected Sensors and Wearable Devices Used in Sport Biofeedback Applications. Future Gener. Comput. Syst. 2019, 92, 582–592. [Google Scholar] [CrossRef]
- Kos, A.; Wei, Y.; Tomažič, S.; Umek, A. The Role of Science and Technology in Sport. In Procedia Computer Science; Elsevier: Amsterdam, The Netherlands, 2018; Volume 129, pp. 489–495. [Google Scholar]
- Zhao, J.; Li, G. Study on Real-Time Wearable Sport Health Device Based on Body Sensor Networks. Comput. Commun. 2020, 154, 40–47. [Google Scholar] [CrossRef]
- Wahab, Y.; Bakar, N.A. Gait Analysis Measurement for Sport Application Based on Ultrasonic System. In Proceedings of the 2011 IEEE 15th International Symposium on Consumer Electronics (ISCE), Singapore, 14–17 June 2011; pp. 20–24. [Google Scholar]
- Kos, M.; Kramberger, I. A Wearable Device and System for Movement and Biometric Data Acquisition for Sports Applications. IEEE Access 2017, 5, 6411–6420. [Google Scholar] [CrossRef]
- Kidman, E.M.; D’souza, M.J.A.; Singh, S.P.N. A Wearable Device with Inertial Motion Tracking and Vibro-Tactile Feedback for Aesthetic Sport Athletes Diving Coach Monitor. In Proceedings of the 2016 10th International Conference on Signal Processing and Communication Systems (ICSPCS), Surfers Paradise, Australia, 19–21 December 2016; pp. 1–6. [Google Scholar]
- Li, Y.; Samad, Y.A.; Liao, K. From Cotton to Wearable Pressure Sensor. J. Mater. Chem. A Mater. 2015, 3, 2181–2187. [Google Scholar] [CrossRef]
- Ishida, K. Sport Skill Evaluation with Wearable Sensors and Statistical Analysis. Open J. Soc. Sci. 2019, 7, 220–230. [Google Scholar] [CrossRef]
- Iervolino, R.; Bonavolontà, F.; Cavallari, A. A Wearable Device for Sport Performance Analysis and Monitoring. In Proceedings of the 2017 IEEE International Workshop on Measurement and Networking (M&N), Naples, Italy, 27–29 September 2017; pp. 1–6. [Google Scholar]
- Hsu, Y.L.; Yang, S.C.; Chang, H.C.; Lai, H.C. Human Daily and Sport Activity Recognition Using a Wearable Inertial Sensor Network. IEEE Access 2018, 6, 31715–31728. [Google Scholar] [CrossRef]
- Huang, X.; Liu, Y.; Zhou, J.; Nejad, S.K.; Wong, T.H.; Huang, Y.; Li, H.; Yiu, C.K.; Park, W.; Li, J.; et al. Garment Embedded Sweat-Activated Batteries in Wearable Electronics for Continuous Sweat Monitoring. NPJ Flex. Electron. 2022, 6, 10. [Google Scholar] [CrossRef]
- Xuan, X.; Chen, C.; Molinero-Fernandez, A.; Ekelund, E.; Cardinale, D.; Swarén, M.; Wedholm, L.; Cuartero, M.; Crespo, G.A. Fully Integrated Wearable Device for Continuous Sweat Lactate Monitoring in Sports. ACS Sens. 2023, 8, 2401–2409. [Google Scholar] [CrossRef]
- Burland, J.P.; Outerleys, J.B.; Lattermann, C.; Davis, I.S. Reliability of Wearable Sensors to Assess Impact Metrics during Sport-Specific Tasks. J. Sports Sci. 2021, 39, 406–411. [Google Scholar] [CrossRef] [PubMed]
- Castillo-Atoche, A.; Caamal-Herrera, K.; Atoche-Enseñat, R.; Estrada-López, J.J.; Vázquez-Castillo, J.; Castillo-Atoche, A.C.; Palma-Marrufo, O.; Espinoza-Ruiz, A. Energy Efficient Framework for a AIoT Cardiac Arrhythmia Detection System Wearable during Sport. Appl. Sci. 2022, 12, 2716. [Google Scholar] [CrossRef]
- Hsu, Y.L.; Chang, H.C.; Chiu, Y.J. Wearable Sport Activity Classification Based on Deep Convolutional Neural Network. IEEE Access 2019, 7, 170199–170212. [Google Scholar] [CrossRef]
- Zhou, B.; Sundholm, M.; Cheng, J.; Cruz, H.; Lukowicz, P. Never Skip Leg Day: A Novel Wearable Approach to Monitoring Gym Leg Exercises. In Proceedings of the 2016 IEEE International Conference on Pervasive Computing and Communications (PerCom), Sydney, Australia, 14–19 March 2016; pp. 1–9. [Google Scholar]
- Umek, A.; Kos, A. Wearable Sensors and Smart Equipment for Feedback in Watersports. In Procedia Computer Science; Elsevier: Amsterdam, The Netherlands, 2018; Volume 129, pp. 496–502. [Google Scholar]
- Hurban, H. Exploring the Intersections of Cultural Performance Practices and Wearable Technology. 2021, pp. 1–15. Available online: https://papers.iafor.org/wp-content/uploads/papers/kamc2021/KAMC2021_60567.pdf (accessed on 1 December 2023).
- Cannavò, A.; Ministeri, G.; Lamberti, F.; Pratticò, F.G. A Movement Analysis System Based on Immersive Virtual Reality and Wearable Technology for Sport Training. In Proceedings of the 4th International Conference on Virtual Reality, Hong Kong, China, 24–26 February 2018; pp. 26–31. [Google Scholar]
- Jenkins, L.; Weerasekera, R. Sport-Related Back Injury Prevention with a Wearable Device. Biosens. Bioelectron. X 2022, 11, 100202. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Subcategory | Capabilities | Applications |
|---|---|---|---|
| 3D Printing Technologies | Aesthetics |
|
|
| Technology |
|
| |
| Anthropometric | Prototyping |
|
|
| Measurement |
|
| |
| Computational Design | Design Advancements |
|
|
| Health-Based Applications |
|
| |
| Human Body Kinematics | Human Body Kinematics |
|
|
| Footwear | Footwear |
|
|
| Health and Safety | Equipment Design |
|
|
| Social Care Technology |
|
| |
| Smart Textiles | Textile Sensor |
|
|
| Applications |
|
| |
| Athletics | Athletics |
|
|
| Category | Acronym | Papers | Subcategory | Papers |
|---|---|---|---|---|
| 3D Printing Technologies | (3D P) | 19 | Aesthetics | 8 |
| Technology | 11 | |||
| Anthropometrics | (Anthro) | 24 | Prototyping | 14 |
| Measurement | 10 | |||
| Computational Design | (Co De) | 20 | Design Advancements | 13 |
| Health-Based Applications | 7 | |||
| Human Body Kinematics | (Kine) | 19 | Human Body Kinematics | 19 |
| Footwear | (Foot) | 15 | Footwear | 15 |
| Health and Safety | (Health) | 29 | Equipment Design | 11 |
| Social Care Technology | 18 | |||
| Smart Textiles | (Smart) | 15 | Textile Sensor | 7 |
| Applications | 8 | |||
| Athletics | (Athle) | 20 | Athletics | 20 |
| 3D P | Anthro | Co De | Kine | Foot | Health | Smart | Athle |
|---|---|---|---|---|---|---|---|
| Aesthetics | Technology | ||||||
| Researchers | Keyword | Researchers | Keyword | ||||
| Yap and Yeong, 2014 [6] | 3D/4D printing | Padash and Carrara, 2020 [14] | Auxiliary tool | ||||
| Pei et al., 2015 [7] | 3D/4D printing | Abdollahi et al., 2020 [15] | Sensor | ||||
| Cui et al., 2022 [8] | 3D/4D printing | Yin et al., 2019 [16] | Sensor | ||||
| Yu and Kim, 2023 [9] | Measurement optimization | Wu et al., 2021 [17] | Sensor | ||||
| Lee and Koo, 2022 [10] | 3D pattern | Loh et al., 2021 [18] | Metamaterial | ||||
| Valtas and Sun, 2016 [11] | 3D/4D printing | Qin et al., 2017 [19] | Sensor | ||||
| Jeong et al., 2021 [12] | Parametric design | Li et al., 2022 [20] | Triboelectric | ||||
| Wang et al., 2023 [13] | 3D/4D printing | Chen et al., 2018 [21] | Triboelectric | ||||
| Qian et al., 2022 [22] | Sensor | ||||||
| Li et al., 2023 [23] | Sensor | ||||||
| De Tommasi et al., 2023 [24] | Auxiliary tool | ||||||
| 3D P | Anthro | Co De | Kine | Foot | Health | Smart | Athle |
|---|---|---|---|---|---|---|---|
| Prototyping | Measurement | ||||||
| Researchers | Keyword | Researchers | Keyword | ||||
| Bamani et al., 2021 [25] | Sensor | Lee, et al., 2018 | Body measurement | ||||
| Delva et al., 2020 [26] | Sensor | Lee, et al., 2018a,b [39,40] | Body measurement | ||||
| Robson and Soh, 2016 [27] | Auxiliary tool | Fan et al., 2019 [41] | Body measurement | ||||
| Tan et al., 2017 [28] | Auxiliary tool | Ban and Jung, 2020 [42] | Body measurement | ||||
| Lee et al., 2017 [29] | Measurement optimization | Granberry et al., 2017 [43] | Body measurement | ||||
| Shin et al., 2019 [30] | Sensor | Kang and Kim, 2023 [44] | Body measurement | ||||
| Schauss et al., 2022 [31] | Sensor | Luximon et al., 2012 [45] | Body measurement | ||||
| Wang et al., 2016 [32] | Sensor | Llop-Harillo et al., 2022 [46] | Robotic technology | ||||
| Anuar et al., 2018 [33] | Auxiliary tool | Kartelli et al., 2018 [47] | 3D/4D printing | ||||
| Verwulgen et al., 2018 [34] | Measurement optimization | Rohmatin et al., 2023 [48] | Measurement optimization | ||||
| Kim et al., 2022 [35] | Measurement optimization | ||||||
| Paterson et al., 2015 [36] | Auxiliary tool | ||||||
| Liu and Huang, 2020 [37] | Auxiliary tool | ||||||
| Nishida et al., 2015 [38] | Sensor system | ||||||
| 3D P | Anthro | Co De | Kine | Foot | Health | Smart | Athle |
|---|---|---|---|---|---|---|---|
| Design Advancements | Health-Based Applications | ||||||
| Researchers | Keyword | Researchers | Keyword | ||||
| Urquhart et al., 2022 [49] | Parametric design | Li and Tanaka, 2018a [62] | Auxiliary tool | ||||
| Lazaro Vasquez, 2019 [50] | Body measurement | Barros et al., 2022 [63] | Auxiliary tool | ||||
| Sareen et al., 2017 [51] | Body measurement | Buonamici et al., 2020 [64] | Auxiliary tool | ||||
| Markvicka et al., 2019 [52] | Body measurement | Li and Tanaka, 2018b [65] | Auxiliary tool | ||||
| Wang et al., 2022 [53] | Body measurement | Zhang et al., 2017 [66] | Auxiliary tool | ||||
| Cheng et al., 2021 [54] | 3D/4D printing | Kumar and Chhabra, 2023 [67] | Auxiliary tool | ||||
| Bai et al., 2021 [55] | Body measurement | Badini et al., 2023 [68] | Auxiliary tool | ||||
| Fernandez-Vicente et al., 2016 [56] | Body measurement | ||||||
| EL-Kholy et al., 2021 [57] | 3D pattern | ||||||
| Greder et al., 2020 [58] | 3D/4D printing | ||||||
| Nachtigall et al., 2018 [59] | 3D/4D printing | ||||||
| Efkolidis et al., 2020 [60] | Parametric design | ||||||
| Sun et al., 2021 [61] | Parametric design | ||||||
| 3D P | Anthro | Co De | Kine | Foot | Health | Smart | Athle |
|---|---|---|---|---|---|---|---|
| Part 1/2 | Part 2/2 | ||||||
| Researchers | Keyword | Researchers | Keyword | ||||
| Tsabedze et al., 2022 [69] | Robotic technology | Balaji et al., 2018 [79] | Auxiliary tool | ||||
| Malvezzi et al., 2020 [70] | Auxiliary tool | Ou et al., 2020 [80] | Auxiliary tool | ||||
| Liu et al., 2022 [71] | Robotic technology | Chen et al., 2017 [81] | Auxiliary tool | ||||
| Kim et al., 2023 [72] | Sensor system | Long et al., 2016 [82] | Robotic technology | ||||
| Chirila et al., 2020 [73] | Robotic technology | Liu et al., 2017 [83] | Auxiliary tool | ||||
| Cempini et al., 2013 [74] | Robotic technology | Cappello et al., 2016 [84] | Auxiliary tool | ||||
| Wu et al., 2019 [75] | Auxiliary tool | Emmens et al., 2018 [85] | Auxiliary tool | ||||
| Chen et al., 2022 [76] | Auxiliary tool | Ji et al., 2020 [86] | Auxiliary tool | ||||
| Abdallah and Bouteraa, 2023 [77] | Auxiliary tool | Zhao et al., 2023 [87] | Robotic technology | ||||
| Allen D’ et al., 2022 [78] | Robotic technology | ||||||
| 3D P | Anthro | Co De | Kine | Foot | Health | Smart | Athle |
|---|---|---|---|---|---|---|---|
| Part 1/2 | Part 2/2 | ||||||
| Researchers | Keyword | Researchers | Keyword | ||||
| Kiernan et al., 2023 [88] | Sensor system | Kimura et al., 2023 [96] | Sensor system | ||||
| Pineda-Gutierrez et al., 2019 [89] | Sensor system | Cheng et al., 2015 [97] | Triboelectric | ||||
| Zrenner et al., 2018 [90] | Sensor system | Su et al., 2023 [98] | Triboelectric | ||||
| Sazonov et al., 2011 [91] | Sensor system | Liu et al., 2020 [99] | 3D pattern | ||||
| Nagamune and Yamada, 2019 [92] | Sensor system | Manavis et al., 2022 [100] | Measurement optimization | ||||
| Ryu et al., 2022 [93] | Sensor system | Amorim et al., 2019 [101] | Metamaterial | ||||
| Tahir et al., 2020 [94] | Sensor system | Ishiguro et al., 2016 [102] | Sensor system | ||||
| Amitrano et al., 2020 [95] | Sensor system | ||||||
| 3D P | Anthro | Co De | Kine | Foot | Health | Smart | Athle |
|---|---|---|---|---|---|---|---|
| Equipment Design | Social Care Technology | ||||||
| Researchers | Keyword | Researchers | Keyword | ||||
| Bukauskas et al., 2021 [103] | Auxiliary tool | Olson, 2018 [114] | Sensor system | ||||
| Nilasaroya et al., 2023 [104] | Auxiliary tool | Callihan et al., 2023 [115] | Sensor system | ||||
| Suen et al., 2021 [105] | Auxiliary tool | Sanfilippo and Pettersen, 2015 [116] | Sensor system | ||||
| Iftikhar H. and Luximon, 2021 [106] | Auxiliary tool | De Fazio et al., 2022 [117] | Sensor system | ||||
| Liang et al., 2018 [107] | Auxiliary tool | Abbasianjahromi and Sohrab, 2022 [118] | Sensor system | ||||
| Laffan et al., 2020 [108] | Sensor system | Xie and Wu, 2023 [119] | Sensor | ||||
| Jeril and Sarath, 2019 [109] | Sensor system | Lin et al., 2022 [120] | Sensor | ||||
| Zhang et al., 2021 [110] | Sensor system | Stetter et al., 2019 [121] | Sensor | ||||
| Tartare et al., 2018 [111] | Sensor system | di Paolo et al., 2021 [122] | Sensor system | ||||
| Park et al., 2019 [112] | Sensor system | Matijevich et al., 2019 [123] | Sensor system | ||||
| Van Kleunen et al., 2019 [113] | Sensor system | Xie et al., 2019 [124] | Sensor | ||||
| Zhao et al., 2022 [125] | Triboelectric | ||||||
| Gao et al., 2017 [126] | Sensor | ||||||
| Picchio et al., 2022 [127] | Sensor | ||||||
| Kang et al., 2022 [128] | Sensor | ||||||
| He et al., 2019 [129] | Triboelectric | ||||||
| Mahmud et al., 2016 [130] | Auxiliary tool | ||||||
| Jinkins et al., 2022 [131] | Auxiliary tool | ||||||
| 3D P | Anthro | Co De | Kine | Foot | Health | Smart | Athle |
|---|---|---|---|---|---|---|---|
| Textile Sensor | Applications | ||||||
| Researchers | Keyword | Researchers | Keyword | ||||
| Jiang et al., 2020 [132] | Sensor | Golparvar and Yapici, 2019 [139] | Sensor | ||||
| Zhao et al., 2020 [133] | Sensor | Luo et al., 2021 [140] | Sensor | ||||
| Maity et al., 2021 [134] | Sensor | Ahmed et al., 2020 [141] | Sensor | ||||
| García et al., 2020 [135] | Sensor | Nanjappan et al., 2019 [142] | Sensor | ||||
| Capineri, 2014 [136] | Sensor | Meng et al., 2020 [143] | Sensor | ||||
| Fan et al., 2020 [137] | Sensor | Papachristou and Anastassiu, 2022 [144] | Sensor | ||||
| Hossain et al., 2022 [138] | Triboelectric | Zhuo et al., 2023 [145] | Sensor | ||||
| Xu et al., 2023 [146] | Sensor | ||||||
| 3D P | Anthro | Co De | Kine | Foot | Health | Smart | Athle |
|---|---|---|---|---|---|---|---|
| Part 1/2 | Part 2/2 | ||||||
| Researchers | Keyword | Researchers | Keyword | ||||
| Kos et al., 2019 [147] | Sensor system | Huang et al., 2022 [157] | Sensor | ||||
| Kos et al., 2018 [148] | Sensor system | Xuan et al., 2023 [158] | Sensor | ||||
| Zhao and Li, 2020 [149] | Sensor system | Burland et al., 2021 [159] | Sensor | ||||
| Wahab and Bakar, 2011 [150] | Sensor | Castillo-Atoche et al., 2022 [160] | Sensor system | ||||
| Kos and Kramberger, 2017 [151] | Sensor | Hsu et al., 2019 [161] | Sensor system | ||||
| Kidman et al., 2016 [152] | Sensor | Zhou et al., 2016 [162] | Sensor system | ||||
| Li et al., 2015 [153] | Sensor | Umek and Kos, 2018 [163] | Sensor system | ||||
| Ishida, 2019 [154] | Sensor | Hurban, 2021 [164] | Sensor system | ||||
| Iervolino et al., 2017 [155] | Sensor | Cannavò et al., 2018 [165] | Robotic technology | ||||
| Hsu et al., 2018 [156] | Sensor | Jenkins and Weerasekera, 2022 [166] | Auxiliary tool | ||||
| Key Words | 3D P | Anthro | Co De | Kine | Foot | Health | Smart | Athle |
|---|---|---|---|---|---|---|---|---|
| 3D pattern | 1 | 1 | 1 | |||||
| 3D/4D printing | 5 | 1 | 3 | |||||
| Auxiliary tool | 2 | 5 | 7 | 11 | 7 | 1 | ||
| Body measurement | 7 | 6 | ||||||
| Measurement optimization | 1 | 4 | 1 | |||||
| Metamaterial | 1 | 1 | ||||||
| Parametric design | 1 | 4 | ||||||
| Robotic technology | 1 | 7 | 1 | |||||
| Sensor | 6 | 5 | 7 | 14 | 10 | |||
| Sensor system | 1 | 1 | 11 | 13 | 8 | |||
| Triboelectric | 2 | 2 | 2 | 1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Minaoglou, P.; Efkolidis, N.; Manavis, A.; Kyratsis, P. A Review on Wearable Product Design and Applications. Machines 2024, 12, 62. https://doi.org/10.3390/machines12010062
Minaoglou P, Efkolidis N, Manavis A, Kyratsis P. A Review on Wearable Product Design and Applications. Machines. 2024; 12(1):62. https://doi.org/10.3390/machines12010062
Chicago/Turabian StyleMinaoglou, Prodromos, Nikolaos Efkolidis, Athanasios Manavis, and Panagiotis Kyratsis. 2024. "A Review on Wearable Product Design and Applications" Machines 12, no. 1: 62. https://doi.org/10.3390/machines12010062
APA StyleMinaoglou, P., Efkolidis, N., Manavis, A., & Kyratsis, P. (2024). A Review on Wearable Product Design and Applications. Machines, 12(1), 62. https://doi.org/10.3390/machines12010062