1. Introduction
During the assembly of an aero-engine, even when the same engine parts are assembled using the same assembly process methods and parameters, different assembly batches will result in varying vibration levels or response characteristics of the entire machine. Small deviations in individual assembly process parameters can lead to significant changes in the vibration response of the entire machine [
1,
2]. The reason for this phenomenon is the complexity of the rotor’s structure. Manufacturing and assembly errors in the components can lead to changes in the connection stiffness of the mating surfaces, which can significantly impact the rotor’s dynamic performance and further affect the vibration characteristics of the entire machine [
3]. Each shaft disc on the rotor is connected by bolts and assembled via manual tightening. Due to the influence of tightened process limitations, there is a significant pre-tightening deviation (reaching up to 40–60% with a high degree of dispersion) after assembly or service for a certain period, which directly affects the dynamic performance of the rotor and even the entire aero-engine. While the geometric machining accuracy of each rotor part is high and the rotor assembly is strictly controlled, ensuring that the static characteristics of the rotor detection index are within the allowable range, there is a lack of detection technology for the dynamic characteristics of the rotor after assembly. This results in the rotor system exhibiting vibration out-of-tolerance phenomenon on the test bench despite having qualified static indicators after assembly. Therefore, it is of great significance to study the dynamic characteristics detection technology of aero-engine rotor components after assembly or service and to improve the overall engine’s dynamic stability.
Researchers typically assess the dynamic characteristics of a structure using indicators such as damping ratio, natural frequency, mode shape, and vibration phase difference. The transfer function of a structure is significantly influenced by the pre-tightening state, which is mainly manifested as follows: When the bolt pre-tightening state is optimal, it maintains stable characteristics in a linear state. However, when the pre-tightening state of the bolt deteriorates, it results in a decrease in connection stiffness, leading to a significant alteration in the transfer function of the bolt flange surface and subsequently impacting the modal and vibration characteristics of the structure [
4]. In recent years, researchers have conducted extensive research on the impact of changes in bolt pre-tightening on the dynamic characteristics of structures [
5].
He X L et al. [
6] used the experimental analysis method to study the influence of bolt loosening on the vibration characteristics of the tower. The results show that the first-order natural frequency, vibration mode, and damping ratio are not sensitive to the change in preload state, while the first-order phase difference characteristics of the wind turbine tower are obviously affected by the loosening of flange bolts. Qin [
7] took the typical disk-drum connection structure on the aero-engine rotor as the object and used the finite element method to study the influence of bolt loosening on the time-varying stiffness of the connection interface. Based on the vibration method, K He [
8] analyzed the influence of bolt loosening on the natural frequency and vibration response of the structure by taking the bolted pipe structure as the object. The results show that when the bolt preloading state changes, the first few natural frequencies of the structure change significantly, which can be used as an index to detect whether the bolt of the pipeline structure is loose. Shuguo L [
9] studied the time-varying stiffness and dynamic response of the bolted drum rotor to the number of bolts, bolt looseness, and system speed.
Yu Liu [
10] obtained the stiffness characteristics and shaft bending characteristics of flange connection after bolt failure via numerical simulation and experimental tests. The rotor motion equation with local stiffness asymmetry and initial bending characteristics caused by flange connection bolt failure was established. The dynamic characteristics of the rotor system were further studied. Finally, the frequency spectrum and orbit of the shaft center of the rotor were obtained via experimental analysis, which verified the accuracy of the numerical analysis. Li [
11] established a rotor model of the rod-fastened rotor using the lumped mass method, considering the contact effect, and solved the model using the Runge–Kutta method. The influence of contact stiffness on the dynamic characteristics of the rotor was studied. According to the research, the uniform relaxation of the interface will affect the motion state of the system, resulting in different changes in the response state and the frequency increasing the amplitude by approx. a factor of two at different speeds. When the non-uniform relaxation occurs at the interface, it will only change the amplitude of the vibration and will not affect the motion state of the system. Beaudoin [
12] used a small number of one-dimensional spring elements and contact elements to simulate the nonlinear contact behavior of the rabbet bolt, and the influence of the rabbet bolt connection on the vibration characteristics of the rotor structure was analyzed.
In addition, scholars have conducted numerous studies on the dynamic characteristics of simple structures with a small number of bolts. These studies consider the effects of pre-tightening state changes through a combination of theory, simulation, and experiments. This provided a wealth of results [
13,
14]. Many researchers use changes in vibration signals as an indicator to identify the pre-tightening state of structures [
15,
16,
17]. Nguyen [
18] has fully integrated the advantages of impedance technology and deep learning algorithms to propose a new method for identifying bolt loosening with automatic impedance feature extraction. Tang Tao [
19] took the real flange structure as the object and obtained the law between different damage statistical indexes and bolt loosening of flange structure via experimental method. They pointed out that the improved damage index root mean square change rate (RMSCR) was related to the position and degree of bolt loosening of the flange structure and was less affected by structural differences. Therefore, it can be used to identify the bolt preload state of the flange structure.
Yue [
20] analyzed the influence of missing bolts on the dynamic characteristics of high-pressure rotors using numerical simulation, and a rotor test bench was built that can carry out impact and frequency scanning experiments under axial tensile force. Based on the obtained vibration response characteristics, the loss function of the average absolute error and the extreme gradient boosting decision method are used to predict the missing position of the bolt. The results show that the prediction accuracy of the model can reach more than 90%. In addition, the evaluation index of the determination coefficient of the prediction effect reaches 0.9, which is significantly higher than other conventional models, such as multiple linear regression and multiple adaptive regression splines. Gong [
21] proposed a method based on subharmonic resonance and adaptive stochastic resonance (ASR) to identify whether the bolt is loose. Through numerical simulation and experimental verification of a typical single bolt connection model, it is proved that this method can effectively identify bolt loosening under a strong noise background. Zhang [
22] proposed an assembly tightness identification method for bolted joints based on modified ensemble empirical mode decomposition (MEEMD) and genetic algorithm least squares support vector machine (GALSSVM), and the accuracy of the proposed algorithm was verified by designing multiple sets of case experiments with different preloads. Huda [
23] systematically positioned vibration sensors during the vibration test and assessed the extent of bolt loosening by analyzing the high-frequency fluctuations in the obtained vibration signal.
In summary, the majority of the existing literature focuses on researching the influence of the preload state on the dynamic characteristics of structures and identifying the preload state of structures through vibration characteristic parameters. However, there is limited research on the method for identifying the preload state using the disc drum assembly of aircraft development as the subject. Compared to other connecting structures, the disc drum assembly has distinctive structural characteristics. It is assembled by a large number of bolts from multiple connected parts, and there are limitations in the established preload identification methods for simple and less-bolted structures. Therefore, it is necessary to explore a new method for identifying the preload in the disc–drum assembly. This paper first explains the principle of structural preload identification, then introduces the characteristics of the turbine disc–drum combination structure and force analysis and establishes its three-dimensional refined finite element model to study the influence of the preload state of the bolts on the modal characteristics of the disc–drum combination structure. Finally, according to the theoretical and modal calculation results, this study proposes the sensitive intrinsic frequency change method and modal mode step method. These methods can be used to identify the preloaded state of the multi-bolt disc–drum assembly, and they have practical engineering significance.
2. Structural Preload State Diagnosis Theory
When a structure responds to an external transient excitation, it naturally vibrates at a specific frequency, which is the natural frequency of the structure. Typically, a structure has multiple natural frequencies that can be readily determined through modal tests. The natural frequency is not affected by external excitation and is an inherent property of the structure. When its mass and stiffness are determined, its value will no longer change. When the damping effect is neglected, the eigenvalue equation for structural vibration is:
where
K is the overall stiffness matrix of the structure,
M is the overall mass matrix of the structure,
ωi is the
i-th order natural frequency of the structure, and
ϕi is expressed as the modal eigenvector. In bolted structures, when the preload state is altered, it causes a certain amount of change in the stiffness, frequency, and mode vector of the structure. Δ
K, Δ
ωi, and Δ
ϕi can be indicated in Equation (2).
By performing a left-multiplication of the above equation with
, followed by expansion and disregarding terms of the second order, further simplification of the above equation can be obtained:
Typically, the stiffness of a bolted structure will change to some extent with the change in preload state, which, in turn, leads to a change in the natural frequency of the structure in a certain interval range. However, in practice, the rotor structure is complex, the number of connecting bolts is large, and the bolt preloading force is strictly controlled in the assembly process, so it is difficult to directly reflect the bolt preloading force deviation and local loosening problems existing in engineering on the natural frequency. Therefore, we can decrease the K value of the mating surfaces by applying a tensile force on the structure. When the K value is maintained within a relatively low range, a slight alteration in the preload state can lead to a significant shift in the natural frequency of specific sensitive orders. This, in turn, can be utilized to investigate and identify the preload state of the mating surfaces of the structure.
In addition, based on perturbed theory, the feasibility of diagnosis of structural preload state can be analyzed from the change in structural mode shape. Perturbed theory shows that after small changes in structural parameters, the natural frequency and mode shape of the structure will also change accordingly, and the modal step phenomenon may occur [
24]. The modal mode step refers to the sequence exchange or dislocation between the modal modes of the structural system, which is manifested as the conversion of the low-order modal mode vector before perturbation into the higher-order modal mode vector after perturbation.
The general equation of structural dynamics is as follows:
where
M is the global mass matrix of the structure,
C is the global damping matrix of the structure,
K is the global stiffness matrix of the structure,
is the acceleration vector of the structural node,
is the velocity vector of the structural node,
x is the displacement vector of structural node, and
F(
t) is the external load vector of the structure.
By solving the natural frequency and mode vector, the result can be obtained in Formula (5):
where
ωi and
u are the natural frequency and mode shape vectors corresponding to the
i-th order mode.
According to Formula (5), the eigenvalue problem of the structure is
where
is the character value,
, and
ω is the angular frequency.
When the bolt preload deviates, it may cause a small detuning, so the mass matrix and stiffness matrix become:
According to the canonical perturbation theory [
24], the eigenvalues and eigenvectors can be expanded into power series based on
.
where the subscript ‘0’ represents the ideal preload state of the structure, and the subscripts ‘1’ and ‘2’ represent the first-order and second-order perturbation states, respectively. Additionally,
ξ is a small parameter.
The pre-perturbation eigenvalue ordering has
. For a modally dense structure, the eigenvalue first-order perturbation may satisfy
According to Formula (11), it can be obtained that
As can be seen from Formula (11), the order of adjacent eigenvalues changes after perturbation, and the corresponding modal modes and eigenvalues also change; that is, the low-order frequency after detuning corresponds to the high-order modes before detuning, and the high-order frequency after detuning corresponds to the low-order mode modes before detuning, and the structure has a modal mode step. According to the above theoretical analysis, the preload state of the structure can be diagnosed by judging whether the jump phenomenon occurs in the structural modal mode.
3. Structural Characteristics and Force Analysis of Turbine Disc–Drum Combination Structure
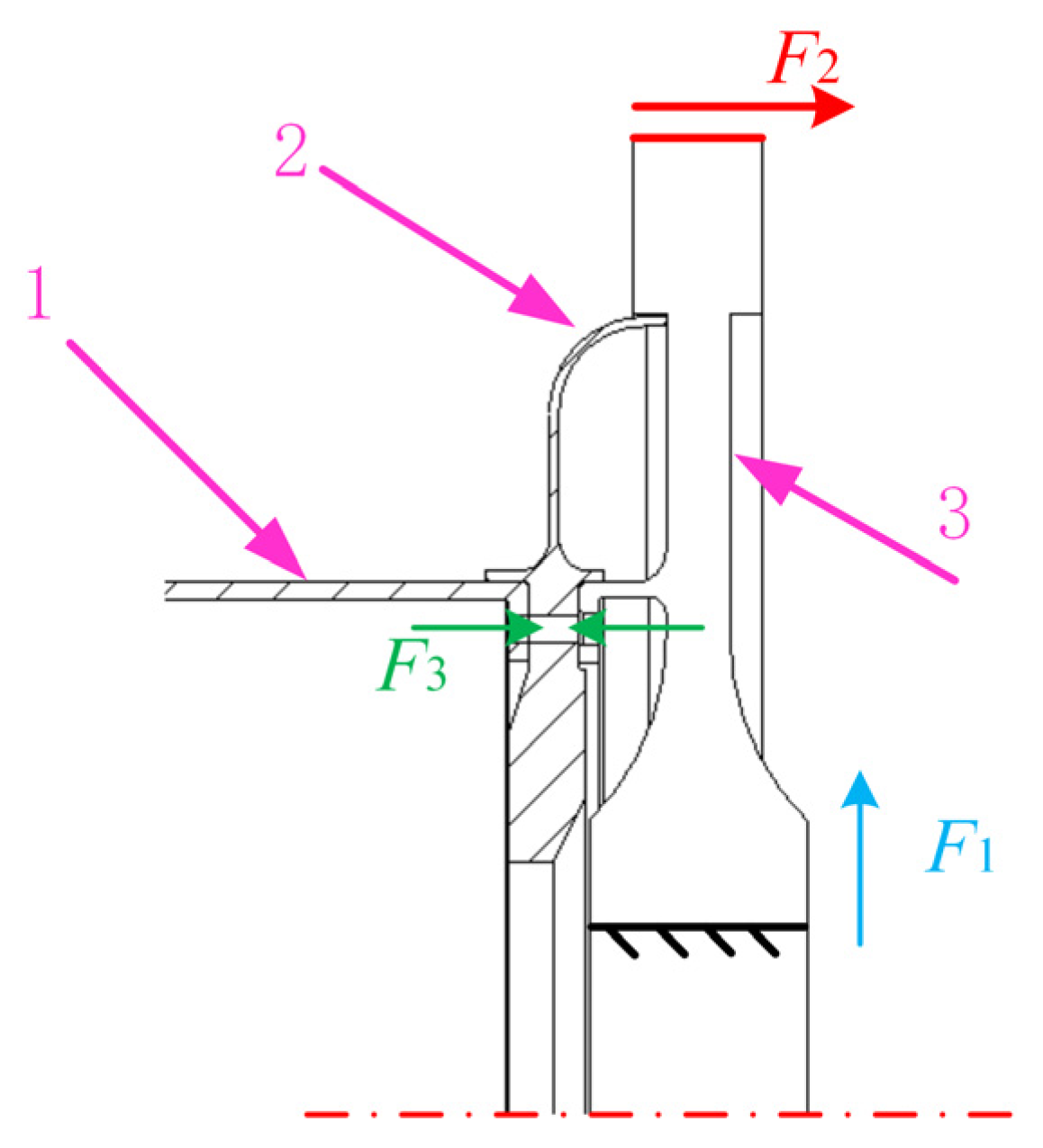
The high-pressure turbine disc–drum assembly is mainly composed of drum shaft 1, labyrinth teeth plate 2, and high-pressure turbine disc 3, as shown in
Figure 1. The drum shaft, labyrinth teeth plate, and high-pressure turbine plate are tightly connected by 48 uniformly circumferential distributed bolts (M8) in series at the rabbet. The high-pressure turbine disc is a disk-like structure with a large diameter and a large mass in the outer ring of the disk-like structure, which requires a large centrifugal force. Compared with high-pressure turbines, the drum shaft is mainly a thin-walled cylindrical structure with a smaller rotation radius, which is less centrifugal force than the high-pressure turbine disc. In summary, it is evident that high-speed rotation of the disc–drum assembly can cause inconsistent deformation of the drum shaft and the turbine disc in the radial direction. This inconsistency may directly lead to deformation inconsistencies in the bonding surface between the high-pressure turbine disc, the drum shaft, and the labyrinth teeth plate.
In practice, the maximum speed can reach 18,800 revolutions per minute (r/min) based on the output power of the aircraft engine. The high-pressure turbine disc drives the drum shaft and the labyrinth teeth plate through the connecting bolts. The entire structure operates in a high-speed, high-temperature, and high-pressure environment. To prevent non-continuous gap structure and wear phenomena, it is essential to apply a sufficiently high fastening tightening torque to the bolts used to connect the turbine disc, drum shaft, and labyrinth teeth plate. A sufficiently high tightening force is required on the bolts used to connect the turbine disc, the drum shaft, and the sealing grate disc. From the forces acting on the structure depicted in
Figure 1, it is evident that
F1 denotes the significant centrifugal force exerted on the combined structure during high-speed rotation, while
F2 represents the axial aerodynamic force acting on the turbine disc due to the high-temperature and high-pressure gases in the combustion chamber, with a magnitude of 200 kN. This force is taken up by the bolts and the interference connection to support the load. In addition, the bolted connections are subjected to a specific bolt preload,
F3. According to the formula
M = 0.2 ×
F3 × d, where
M is the pre-tightening torque of the bolted connection, and d is the nominal diameter of the bolt. When the bolt strength grade is 10.9, take
, and the preload is calculated as
F3 = 20 kN. The inner ring surface of the turbine disc constrains the axial and circumferential degrees of freedom and only releases the radial degrees of freedom.
4. Finite Element Model of Turbine Disc–Drum Combined Structure
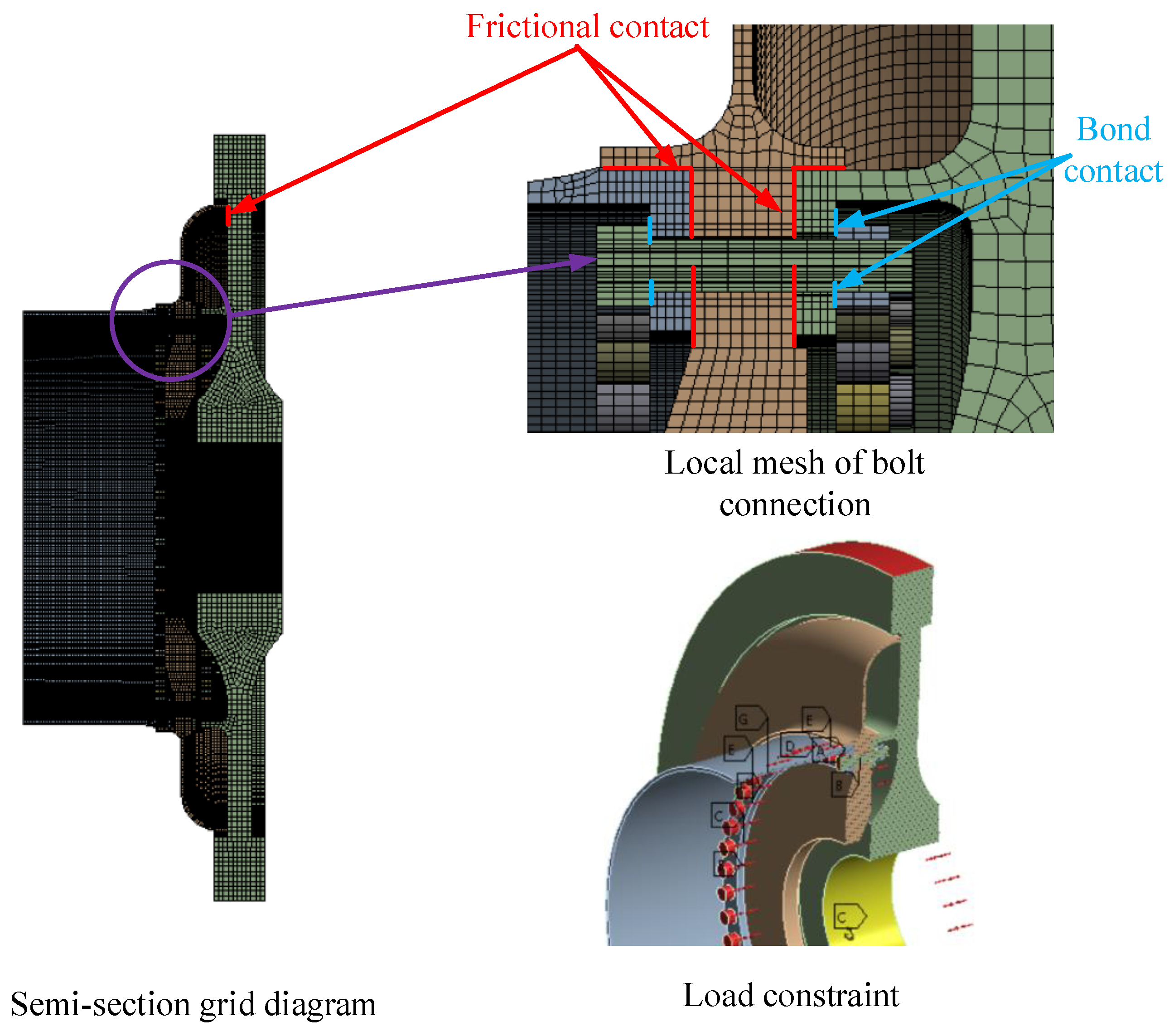
In order to enhance solution efficiency and computational convergence, it is necessary to perform geometrical cleanup and simplify the turbine-disc–drum combined structure before modeling. This involves (1) removing chamfering and chamfering features from each part and (2) not considering the bolt thread contact effect and instead using a simplified bolt to simulate the standard bolt equivalently. Since the contact effect of the combined surface of the turbine disc drum structure will significantly impact the accuracy of the results, and the contact characteristics are sensitive to the mesh quality, it is necessary to refine the mesh in the key areas of this part.
Figure 2 depicts the finite element model of the turbine disc–drum combination structure meshed via hypermesh and analyzed using Ansys Workbench. The unit used in this analysis is solid185. In hypermesh software, the turbine disc, grate disc, drum cylinder shaft, and bolts are respectively sliced to meet the conditions of mapping mesh division. Then, the mesh density near the bolt holes and the combination surface is controlled to ensure the mesh quality in the key areas. Finally, the disc–drum combination structure is divided into a hexahedral structured mesh model. The number of cells in this model is 751,200, the number of nodes is 973,075, and the average mesh quality is 0.75, which can meet the requirements of solution accuracy.
Due to the deformation incoordination phenomenon that is prone to occur in the rotor stop, it is not possible to simulate the fit between the turbine disc, the grate disc, and the drum and cylinder shaft by binding the contact. To establish contact pairs between the mating surface end face and the stop ring face, Target170 and Contact174 element types are utilized. An interference amount of 0.02 mm is applied to simulate the stop interference assembly between the components. The coefficient of friction contact is set to 0.2, and the remaining contact surfaces are treated as linear bound contacts. The contact characteristics are resolved using the augmented Lagrangian algorithm. It is divided into two load steps. The first step is to load F = 20 kN preload, a total of 48 bolts, and simulate the assembly stage. In the second step, the pre-tightening force is locked, the F1= 200 KN axial tension force is applied at the edge of the disc, and the rotational speed r = 18,800 rpm is applied to the overall structure to express the centrifugal force of the component, which is used to simulate the service stage. To be consistent with the actual working conditions, a cylindrical coordinate system is established on the inner ring of the disc to constrain the axial and circumferential degrees of freedom of the inner ring of the disc and release the radial degrees of freedom.
Referring to the actual engine material, the main component material of the turbine disc–drum is GH4169, and the Poisson’s ratio is 0.3 at room temperature, but the Poisson’s ratio increases to 0.33 at 700 °C. Because the composite structure is located in the high-pressure turbine part of the engine rotor and carries high-temperature and high-pressure gas, Poisson’s ratio is set to 0.33. The material of bolts and other connectors is set to 1Cr11Ni2W2MoV, and the material parameters are shown in
Table 1.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





